Регулятор с переменной структурой
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 954929
Авторы: Виноградов, Пучков, Сабуров, Савинов, Соболев




Текст
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Сфюэ СфветскикСоциалистическикРеспублик(51) И. Кл. 005 В 13/00 РвуАяротаеяай квнктет СССР яя делан изобретений к отариткй(088.8 Дата опубликования описания От,09,82 Н. В, Сабуров, А. М. Пучков, А. Г, Савинов, В. В, Ви В. М. Соболев(54) РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ 1Изобретение относится к приборостроению и может быть использовано при разработке систем автоматического управле-, ния нестационарными объектами при наличии больших внешних возмущений.Наиболее близким к предлагаемому5 является регулятор с переменной структурой, содержащий последовательно соединенные формирователь линии переключения, блок сравнения знаков, переключа о тель и сумматор, второй вход которого соединен со втарым входом блока сравнения знаков и с выходом формирователя сигнала управления, входы которого под ключены к соответствующим входам;:формирователя линии переключателя, и последовательно соединенные источник опорного сигнала и пороговое устройство, второй вход которого соединен с вьцсодом формирователя сигнала управления, а вы-. 20 ход которого соединен со вторым входом переключателя. В этом регуляторе имеют ся два канала управления с переменной структурой и функпионалытый с постояв 2ными параметрами) и обеспечивается выбор режима управления в зависимости отрежима движения и сигналов управленияи переключения 1.Известный регулятор имеет невысокуюточность, недостаточное быстродействиеи ограниченную устойчивость.Управление, осуществляемое такимрегулятором, является статическим, вследствие чего неравенство нулю статической ошибки в установившемся режиме"ст Ф 0 обуславливает смещение характеристик регулятора относительно разнополярных вариаций задающих воздействий, что ухудшает процесс регулирования,Кроме того, в регуляторе отсутствуетвозможность ограничения пронзводньцс; вдвижении фазовых координат при наличиибольших возмущений.Цель изобретения - повышение точности, устойчивости и быстродействия регулятора,Поставленная цель достигается тем,что в известный регулятор вводятся по934020 ф5 - нескорректированная линия переклюм чения, определяемая как Ян Сл х+а + С х 2где С, Ст =соль 1; Бскорректированная линия переключания(сколыкения), определенная выше, приэтом Внутри А Ср( Х 2 ) =С =СОЙМ;Ч" - участки траектории изображающей точки; Ол, О - точки сопряженияразнородных управлений.,10 Схема содержит формирователь 1 линии переключения, блок 2 сравнения знаков, формирователь 3 сигнала управления,коммутатор 4, сумматор 5, пороговоеом устройство 6, переключатель 7, источник15 8 опорного сигнала, интегратор 9, ограничитель 10, первый усилитель 11, второйусилитель 12, ограничитель 13 формирователя линии переключения, сумматор 14формирователя линии переключения, при 20 чем О - сигнал непрерывной компоненты управления, О = с хл . днах, где3, С 1 - передаточные коэффициенты посигналам Х, и Хсоответственно; Осигнал дискретной компоненты управлео 5 ния; 0- сигнал интегральной компоненты управления; б - выходной сигналуправления, б = О- Ч + О, Ея сигнал уставки,Бф Сх. С(Х) Х 40 следовательно соединенные интегратор, вход которого соединен с первым входо формирователя сигнала управления, и огр ничитель, выход которого соединен с третьим входом .сумматора.Формирователь линии переключения состоит из последовательно соединенных первого усилителя, вход которого соеди нен с первым входом формирователя ли нии переключения, и сумматора, выход которого соединен с выходом формирова теля линии переключения, и последовательно соединенных второго усилителя, вход которого соединен со вторым вход формирователя линии переключения, и ограничителя, выход которого соединен со вторым входом сумматора.Такое подключение интегральной цепи сводит к нулю в установившемся режим смещение характеристик составных элементов, охваченных ею.Введение ограничения по сигналу ин тегральной цепи обеспечивает большую эффективность ее при малых рассогласованиях системы, т.е. непосредственно п вышение точности, а при больших рассогласованиях сохранение такой эффективности нежелательно вследствие усилени колебательных режимов и усиления отмеченного недостатка известного регуля- З 0 тора. Устранение этого недостатка известного регулятора и повышение устойчивости достигается предлагаемой схемой формирователя линии переключения, Такое его построение определяет нелиней- З 5 ную функцию линии переключения 5 где Х Х 1 - фазовые координаты;Х - сигнал рассогласованиясистемы;Х = ХлС = соп 5)С (х нелинейный передаточный45 коэффициент, значение которого при больших сигналах носит убывающий характер.Это обеспечивает более быстрое попадание изображающей точки на линию переключения 5 и ограничение сигнала х 2На фиг. 1 изображена фазовая плоскость для пояснения движения изображающей точки; на фиг. 2 - блок-схема предлагаемого регулятора; на фиг. 3 - блоксхема формирователя линии переключения. На этих фигурах обозначены А - область режима работы канала с постоянными параметрами ( функциональное управление); Система работает следующим образом, При наличии возмущающих и управляющих воздействий таких, что ОЕ сигнал управления б с сумматора 5 выделяется по двум компонентам О и 0, т.е, 6 = О + 1, формируемым каналами линейного статического (блок 3) и нелинейного астатического (блоки 9 и .10) управлений. А статическая компонента 0 позволяет свести к нулю установившийся сигнал ошибки системы; т,е. хцст = О, и, следовательно, х. ст х роост = О, и Ост = О, т.е. обеспечивается несмещение характеристик порогового устройства относительно начала координат. При наличии воздействий, определяющихОЯ формируется дополнительная компонента Цпеременной структуры (блоки 6-8), коммутируемая блоками 1 и 2 формирующими сигналы переключения 5 и логики 1 соответственно. При этом б = О - О т + Ои движение фазовых координат происходит в режиме, переключения (траектория Т Т фиг. 1) и скольжения (траектория 11, фиг. 1). При достиженииОсистема работает по линейному закону как описано выше.5 984929 6Усилители 11 и 12 линейно изменя- ния точности регулятора, в него введены ют сигналы Хи Х усоответственнре . последовательно соединенные интегратор, Зона ограничения 13 в цепи сигнала Х вход которого соединен с первым входом не менее величины, соответствующей гра- формирователя сигнала управления, и огра- нице разделения режимов управления з ничитель, выход которого соединен с (точки О .и О фиг. 1). Введение это- третьим входбм сумматора.га ограничения, уменьшая угол наклона 2. Регулятор по п. 1, о т л и ч а ю к Х, ограничивает уровень сигнала щ и й с я тем, что, с целью повышения Х. СЬновременно такая функциональная устойчивости и быстродействия регулятодеформация линии переключения увеличи- О ра, формирователь линии переключения вает устойчивость и быстродействие по- состоит из последовательно соединенных падания на нее изображающей точки первого усилителя, вход которогосоеди(фиг. 2), нен с первым входом формирователя линииПредлагаемый регулятор с нелинейным переключения, и сумматора, выход отоастатическим каналом и нелинейным фор,рого соединен с выходом формирователя мированием линии переключения обеспе- линии переключения, и последовательно чивает деформацию линии переключениясоединенных второго усилителя, вход ко, увеличивает устойчивость работы, торого соединен с вторым входом форми повышает точность управления до 20 и рователя линии переключения, и ограни- быстродействие до 15%, щ чителя, выход которого соединен с вторым входом сумматора.Формула изобретения Источники информации,принятые во внимание при экспертизе1, Регулятор с переменной структу- ф 1. Авторское свидетельстворой по авт. св, М 849141, о т л и ч а - % 849141, кл. 6 08 В 13/02, 1979ю щ и й с я тем, что, с целью повыше-, прототип).(Ри ортная то 6431/ филиал тенг, г. Ужгород, ул. Проектная, 4 Составитель А. ЛаТемред А.Бабинвц 7 Тираж 914ИПИ Государственного копо делам изобретений и3035, Москва, Ж, Раущ Корректор Е. Рошк Подписета СССкрыт ийкая наб.,
СмотретьЗаявка
2857299, 20.12.1979
ПРЕДПРИЯТИЕ ПЯ М-5728
САБУРОВ НИКОЛАЙ ВАСИЛЬЕВИЧ, ПУЧКОВ АЛЕКСАНДР МИХАЙЛОВИЧ, САВИНОВ АНАТОЛИЙ ГРИГОРЬЕВИЧ, ВИНОГРАДОВ ВЛАДИМИР ВАСИЛЬЕВИЧ, СОБОЛЕВ ВИКТОР МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: переменной, регулятор, структурой
Опубликовано: 30.08.1982
Код ссылки
<a href="https://patents.su/4-954929-regulyator-s-peremennojj-strukturojj.html" target="_blank" rel="follow" title="База патентов СССР">Регулятор с переменной структурой</a>
Формирователь силуэтного сигнала

Номер патента: 773961
Опубликовано: 23.10.1980
МПК: H04N 9/02
Метки: сигнала, силуэтного, формирователь
...11 (12 и 13)напряжения через сумматор 8 (9 и 10) посту.пают на входы опорных уровней блоков 5 (6и 7) сравнения,В режиме "Работа" формирователь силуэтно.го сигнала осуществляет слежение за изменешями экстремальных значений видеосигналов В,С, В, соответствуюгцих изображению фоновогоэкрана, и вырабатывает собственно силуэтныйсигнал. В данном режиме выключатель 19 за.мыкается оператором, после чего в поле зрения телевизионной камеры вводится объект переднего плана (например, актер), размещенныйперед фоновым экраном. При этом управляющий,сигнал на выходе расширителя 17 формируетсякак из гасящего сигнала, так и из силуэтногосигнала (который появляется на выходе шести.входового элемента 1 И в моменты времени,когда исходные...
Формирователь однополосного сигнала

Номер патента: 1644358
Опубликовано: 23.04.1991
Автор: Волков
МПК: H03C 1/52
Метки: однополосного, сигнала, формирователь
...цепочку 32, шестой усилитель 26, первый триггер 22. Причем для работы используются отрицательные фронты с выхода дифференцирующей цепи 32. При наличии импульса на выходе первого триггера 22, первый коммутатор 23 меняет полярность сигнала на своем выходе на 180 и тем самым преобразует однополярный сигнал 01 з(т) в двухполярный гармонический, который имеет полосу в 2 раза меньшую полосы частот однополярного сигнала 04 о (1). С выхода второго блока 17 извлечения квадратного корня однополярный сигнал поступает на один вход второго коммутатора 15 через четвертый усилитель 21, фазорасщепитель 9. На второй вход второго коммутатора 15 поступает сигнал с второго триггера 14, управляемого положительными фронтами сигнала с дифференцирующей цепи...
Формирователь однополосного сигнала с частотной манипуляцией

Номер патента: 1054871
Опубликовано: 15.11.1983
Автор: Волков
МПК: H03C 1/52
Метки: манипуляцией, однополосного, сигнала, формирователь, частотной
...которого подключен выход.второго перемножителя, а также частотно-манипулиронанный автогенератор,при этом первый вход второго перемножителя и вход первого Фазоврашателя соединены между собой и точка их соединения является входомманипулирующих сигналов формирователяоднополосного сигнала с частотнойманипуляцией, введен однопрлупериод"ный выпрямитель, выход которого соединен с управляюшим входом частотноманипулированного автогенератора, авход соединен с входом первого фазоврашателя, между выходом частотноманипулированного автогенератора ивходом второго фазоврашателя введены последовательно соединенные фазорасщепитель и блок коммутации фазорасщепленных сигналов,.при этомуправляющий .вход блока коммутацииФазорасшепленных сигналов...
Формирователь управляющего сигнала
Номер патента: 1304142
Опубликовано: 15.04.1987
Авторы: Грушковский, Кац, Леликов, Нихинсон, Полищук
МПК: H02M 1/08
Метки: сигнала, управляющего, формирователь
...1 и 3 1351 ьБацицсского разделеня и по;1 ацс рслсицоГо сигнала задания ца вхоЛ элемента 2гальванического разделения,:а выходе которого формируется сигг)ал , поступаюций церез второй вход первого эгеас цтаИ:И 4 на вход запуска генератора 6,через первый вход второго элемента 1,1 И 5ца третий вход реверсивного сцетцика 9 ица псрвый вход элемента 11 АМЯТЬ 8. Навыходе элемента ПАМЯТЬ 8 формируетсясигнал 1, который закрывает элемент ЗАПРЕТ 7 и поступает;а третий вхол гене 55 ратора 6,Наличие сигналов 1 цд первом и третьем входах генератора 6 цриволит к формированию ца ео Быхоле сигнала , ко 13041425 1 О 15 Фор,идла нзодрленпн 20 торый поступает на первый вход реверсивного счетчика 9. Наличие сигналов 1 на двух входах реверсивного счетчика 9...
Формирователь стробирующего сигнала
Номер патента: 1467794
Опубликовано: 23.03.1989
Авторы: Лебедев, Попашенко, Середин, Хабаров
МПК: H04N 7/18
Метки: сигнала, стробирующего, формирователь
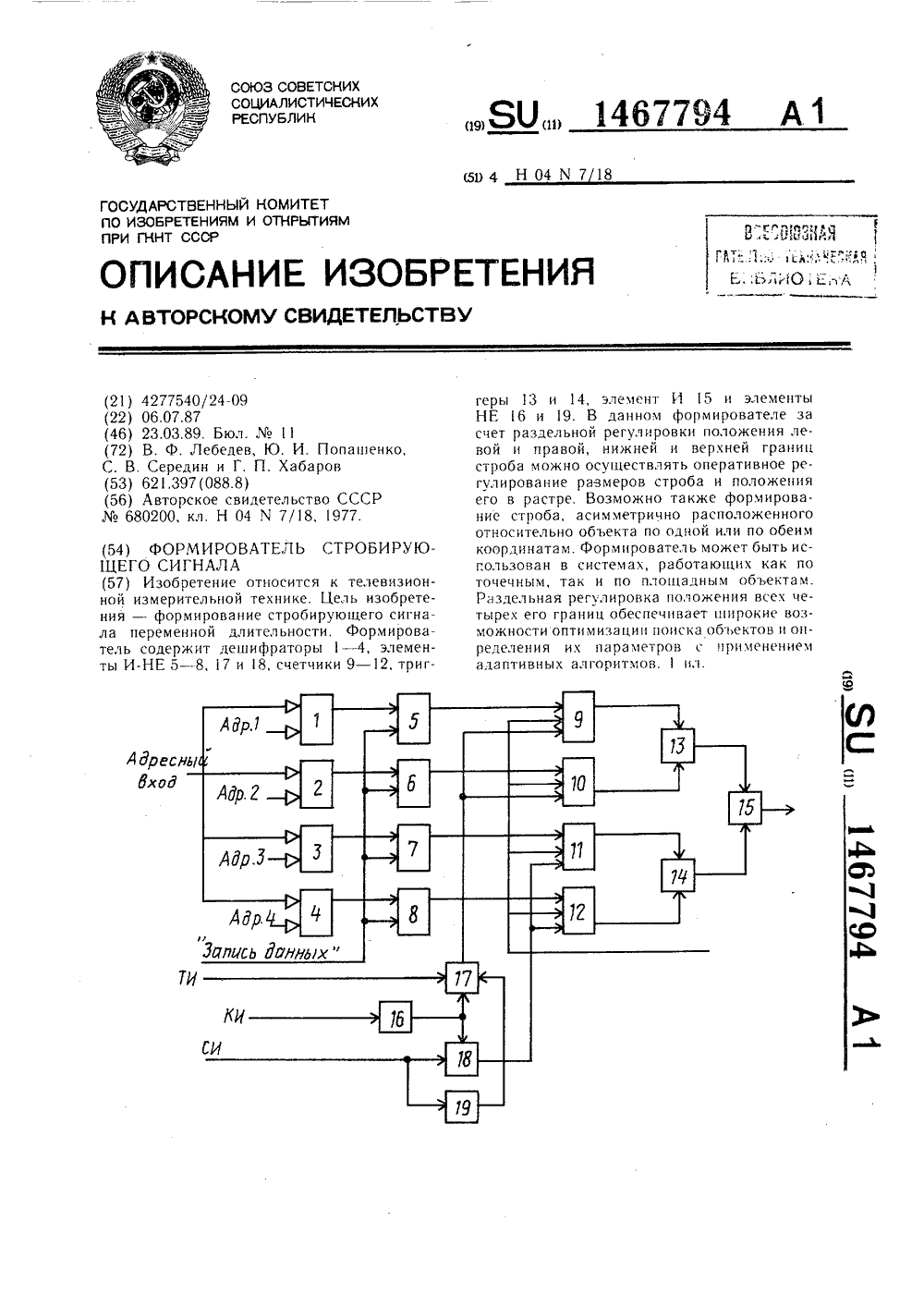
...10 счет. чиков поступают тактовые импульсы. По достижении заполнения счетчика 9 его выходной импульс переполнения устанавливает в состояние Лог. 1 первый триггер 13. Это состояние удерживается до тех пор, пока не заполнится второй счетчик 10 и его импульс переполнения не установит первый триггер 13 в состояние Лог. 0, Промежуток времени между прямым и обратным перебросом первого триггера3 определяет длительность строчной составляющей строба.Импульс строчной составляющей строба вырабатывается на каждой строке, занимая на всех строках одинаковое временное положение в интервале прямого хода по строке. Одновременно в интервале прямого хода по кадру на объединенные счетные входы третьего 11 и четвертого 12 счетчиков поступают строчные...
Предыдущий патент: Цифро-аналоговый регулятор для интегрирующего электропривода
Следующий патент: Цифровой корректор статической и динамической характеристик инерционного измерительного преобразователя
Случайный патент: Устройство для отбора проб сыпучего материала