Патенты с меткой «манипулятором»
Устройство для управления дистанционным манипулятором

Номер патента: 883862
Опубликовано: 23.11.1981
Авторы: Березкин, Виноградов, Суслов
МПК: G05B 11/00
Метки: дистанционным, манипулятором
...1 задаюцего органа закручивается упругий элемент 2, угол 20закрутки которого замеряется датчиком3 момента, т.е, вырабатывается сигнал, пропорциональный силовому воздействию оператора на звено 1 задающегооргана. Этот сигнал поступает навторой вход первого сумматора 4, Капервый вход первого сумматора 4 поступает сигнал с датчика 8 давления,пропорциональный силовой нагрузке объекта манипулирования, на звено 9 исполнительного органа и непосредственно сиоединенного с ним гидропривод,7 .Разностный сигнал с первого сумматора 4 подается через усилитель 5 иэлектрогидроусилитель б на гидропри- З 5вод 7. Звено 9 исполнительного органа ыри этом перемещается со скоростью,пропорциональной разности с однойстороны силового взаимодействия оператора и...
Система управления манипулятором
Номер патента: 884997
Опубликовано: 30.11.1981
Авторы: Акимов, Артамонов, Баринов, Ведерников, Дьяков, Рубцов, Сафрон, Яскунов
МПК: B25J 5/00
Метки: манипулятором
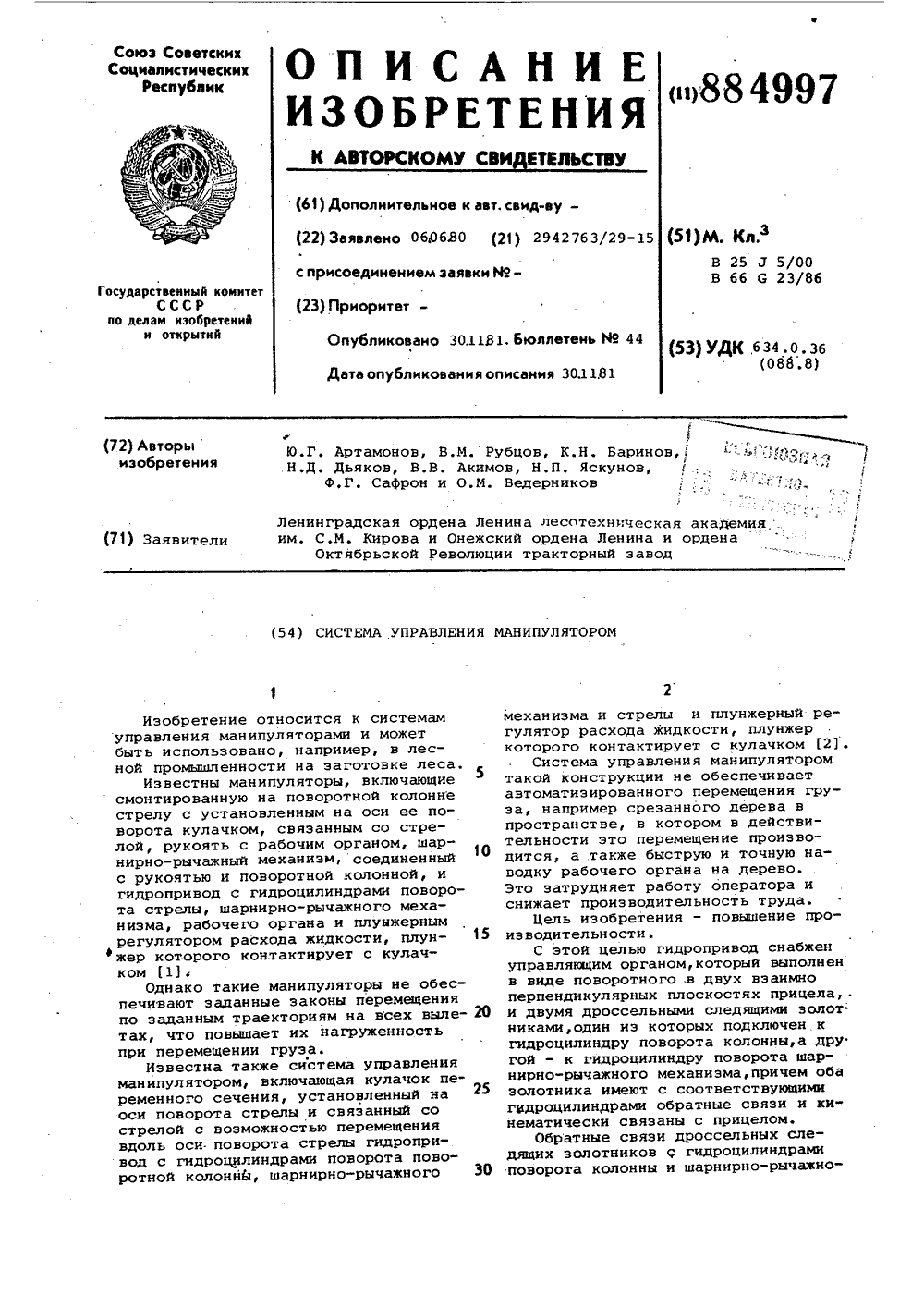
...Кроме того дроссельные следящие золотники 15 и 16 установлены в качающихся направ. ляющих 23 и 24. В кабине оператора установлен прицел 25, поворотный в двух взаимно перпендикулярных плоскостях относительно осей 26 и 27. Ба прицеле смонтированы задающие кулачки 28 и 29, один иэ которых снабжен роликом 30 и контактирует при помощи ролика с золотником 16, а другой выполнен винтообразным и контактирует с золотником 15 . Прицел 25 снабжен ручками 31, сеткой 32 и мушкой 33.Параметры гидропривода рассчитаны так, что визирная линия, проходящая через центр сетки 32 и муш у 33, определяет начальное конечное положение рабочего органа 4 при наведении его на дерево. Для облегчения работы оператора рукоятки управленияостальными гидроцилиндрами...
Устройство для управления манипулятором

Номер патента: 885968
Опубликовано: 30.11.1981
Автор: Васильев
МПК: G05B 11/00
Метки: манипулятором
...задающийорган 1 и исполнительный орган 8 согласо.ваны, в реверсивном счетчике 16 и регистре17 памяти содержатся одинаковые числа,равные 2 У 1, где И - разрядность счетчика16 и регистра 17. При этом второй ключ18 находится в нейтральном положении и навход первого сумматора 10 поступает толькосигнал ошибки первого и второго сельсинов4 и 9, который отрабатывается двигателем 6,В том числе, если скорость задающего органа 1 превосходит максимальную скорость исполнительного органа 8, на вход реверсив. ного счетчика 16 с формирователя 19 им. пульсов поступает последовательность импуль. сов, возникающих каждый раз, когда ошибка сельсинов 4 и 9 превысит определенный уровень, При этом число, содержащееся в реверсивном счетчике 16, будет...
Устройство для управления манипулятором

Номер патента: 903807
Опубликовано: 07.02.1982
Авторы: Комиссаров, Кузетенко, Ломака, Федоров
МПК: G05B 19/00
Метки: манипулятором
...функциональная схема блока управления ключами.Устройство содержит блок 1 заданияпрограммы, сумматор 2, привод 3, блок4 управления ключами, первый ключ 5,второй ключ 6, элемент 7 памяти, регулируемый усилитель 8, блок 9 заданиякоэффициента усиления, датчик 10 попожения, перестраиваемый генератор 11импульсов, первый элемент И 12, второй элемент И 13, первый одновибратор14, первый триггер 15, второй одловибратор 16, элемент ИЛИ 17, второй триггер 18, третий элемент И 19,Устройство работает следующим образом,Устройство работает в двух режимах;позиционном и скоростном. Выбор режима работы производится в блоке 1, вкачестве которого может быть использована ЦВМ, Блок 1 формирует сигналпереключения на своем уравляюшем выходе, подключенном ко...
Устройство для программного управления манипулятором

Номер патента: 903812
Опубликовано: 07.02.1982
Авторы: Барац, Белоцерковский, Жуков, Захаров, Киклевич, Котенко
МПК: G05B 19/43
Метки: манипулятором, программного
...очередь раз-. бита на цилиндры прямого и обратного ходов, первые из которых связаны с поршневыми, а вторые с штоковыми по- фИ лостями соответствующих гидроприводов манипулятора. Увеличение числа однополостных цилиндров в группах обеспечивает увеличение числа точек позиционирования звеньев манипулятора.Для пополнения замкнутых объемов систем.,образованных однополостными цилиндрами 14, трубопроводами 16 и полостями гидроприводов поворотныхи поступательных движений звеньев манипулятора предусмотрены узлы 17 подпитки системы рабочей жидкостью в виде емкости, выполненной жидкостью под избыточным давлением и связанной через обратные клапаны 18 с трубопроводами 16.Устройство работает следующим образом.Сначала определяют программу движения...
Устройство для управления электромеханическим копирующим манипулятором

Номер патента: 928297
Опубликовано: 15.05.1982
Авторы: Васильев, Лазуткин, Мокрушин
МПК: G05B 11/00
Метки: копирующим, манипулятором, электромеханическим
...12.В случае возникновения равновесногосостояния, характеризующегося непод"вижным положением задающего 1 и исЗОполнительного 4 органов, . когда внешние по отношению к рассматриваемомуприводу силы уравновешиваются активным моментом электродвигателя 5,сигналы с выходов нуль-органов 11 и 12поступают на элемент И 13, вызываяпоявление сигнала на его выходе, подключенном к элементу 11, С выходаэлемента 14 полученный сигнал непосредственно поступает на управляющийвход ключа 9, разрывающего цепь пита- ффния электродвигателя 5, а пройдячерез второй усилитель 15, выполненный релейным, вызывает срабатываниемеханизма 16, фиксирующего положениеисполнительного органа 4, Таким об" фразом, происходит замена активногомомента электродвигателя 5...
Устройство для управления сборочным манипулятором

Номер патента: 930228
Опубликовано: 23.05.1982
МПК: G05B 11/00
Метки: манипулятором, сборочным
...14.вУстройство работает следующим образом.С задатчика 12 скорости поступает сигнал на отработку приводом 7 заданной скорости для исполнительно- д го механизма 8, содержащего силовой редуктор, схват и т.д. Этот сигнал,)выцитая сигнал датчика 9 скорости, поступает через усилитель 3, коммутатор 5 и блок 6 коррекции на привод 7, При контакте исполнительного механизма с предметом с определенным усилием или при осуществлении этапа сборочной операции контактируемых деталей сигнал с датчика 10 контакта переключает коммутатор 5 с конту" ра управления по скорости на контур управления по усилию. А именно, с данного момента сигнал с задатцика 13 усилий, вычитая сигнал с датчика 11 усилия во втором сумфаторе 2 подается через второй усилитель 4,...
Устройство для управления манипулятором

Номер патента: 930256
Опубликовано: 23.05.1982
МПК: G05B 19/00
Метки: манипулятором
...без нагрузки, Сигналы свыходов полосовых фильтров 11 усиливаются регулируемыми усилителями 12,детектируются детекторами 13, усредняются интеграторами 14, время интегрирования которых зависит от выходного50напряжения каналов и определяется компараторами 15, сравнивается во вторыхсумматорах 16 с допустимыми значениями амплитуды, задающими блоками 17эталонного сигнала, после чего управляющее напряжение подается на управляющийвход электронного ключа 7 через элемент ИЛИ 9. На второй вход элемента 3 930256ИЛИ 9 подается напряжение с выходавторого канала, полученное аналогичнымобразом при измерении колебаний в вертикальном направлении. Только при отсутствии сигнала запрета на выходе обоихканалов и прн наличии команды с блока 1задания...
Устройство для управления копирующим манипулятором

Номер патента: 935871
Опубликовано: 15.06.1982
МПК: G05B 11/00
Метки: копирующим, манипулятором
...системы замкнута, и при вращении задающего органа 1 сигнал рассогласования с выхода сумматора 6 через коммутатор 7 и усилитель 8 поступает на двигатель 9, Вращение, передаваемое двигателем 9 исполнительному органу 3, направлено на устранениеимеющегося рассогласования, Устройство работает в режиме копирования.З 5При появлении сигнала на выходезадатчика 14 скорости происходит изменение сигнала на выходе нуль-орга;на 15, которое переводит триггер 13по установочному входу в состояние,4 ц,обеспечивающее переключение коммутатора 7 в такое положение, при котором на вход усилителя 8 подается сигнал с эадатчика 14 скорости, а главная обратная связь при этом размыка 45ется. Устройство переходит в режимнепрерывного вращения,Перевод устройства в...
Устройство для управления манипулятором

Номер патента: 938261
Опубликовано: 23.06.1982
Авторы: Грузинцев, Данилов, Левин, Лудиков, Олехнович
МПК: G05B 19/02, G05B 23/02
Метки: манипулятором
...схвата и деталь кладется на матрицу 15 штампа. Далее начинается втягивание схвата и при выходе его из зоны .штампа от одного из командных датчиков осуществляется включение пресса. При повороте схвата по направлению 20 к вибробункеру следующим командным датчиком осуществляется включение устройства удаления отштампованной детали с матрицы штампа (например, устройства сдува). На Этом цикл ра боты манипулятора заканчивается так как далее начинается его повторное выдвижение к устройству ориентирования (вибробункеру). Конец цикла характеризуется срабатыванием дат чиком конца цикла.Таким образом, в первом цикле устанавливаются все триггера 3 и одновременно сигналы с командных датчиков через преобразователи 1 проходят цереэ элементы И...
Устройство для управления подвижным манипулятором

Номер патента: 941932
Опубликовано: 07.07.1982
Автор: Цветков
МПК: G05B 19/00
Метки: манипулятором, подвижным
...перемещением вырабатывает команду на торможение и включает дат5чик 5 тормозного пути, Привод 4 перемещения тормозит подвижной манипулятор, который останавливается в некоторой точке, в районе, где находитсяобслуживаемое оборудование. Истинныекоординаты этой. точки относительнообслуживаемого оборудования в направлении движения манипулятора определяются при помощи датчика 5 тормозногопути, а в направлении, перпендикулярномдвижению и по углу между осью мани- .пулятора и объектом - с помощью измерителей 10 и 11, вычитателя 12и преобразователя 13,С помощью одного измерителя (на- ЗОпример, 10) определяется истинноезначение расстояния от центра координат манипулятора до объекта, а разность показанных первого и второгоизмерителей 10 и 11...
Цифровая система программного управления роботом манипулятором
Номер патента: 943644
Опубликовано: 15.07.1982
Авторы: Антоненко, Коротун, Тимошенко
МПК: G05B 19/00
Метки: манипулятором, программного, роботом, цифровая
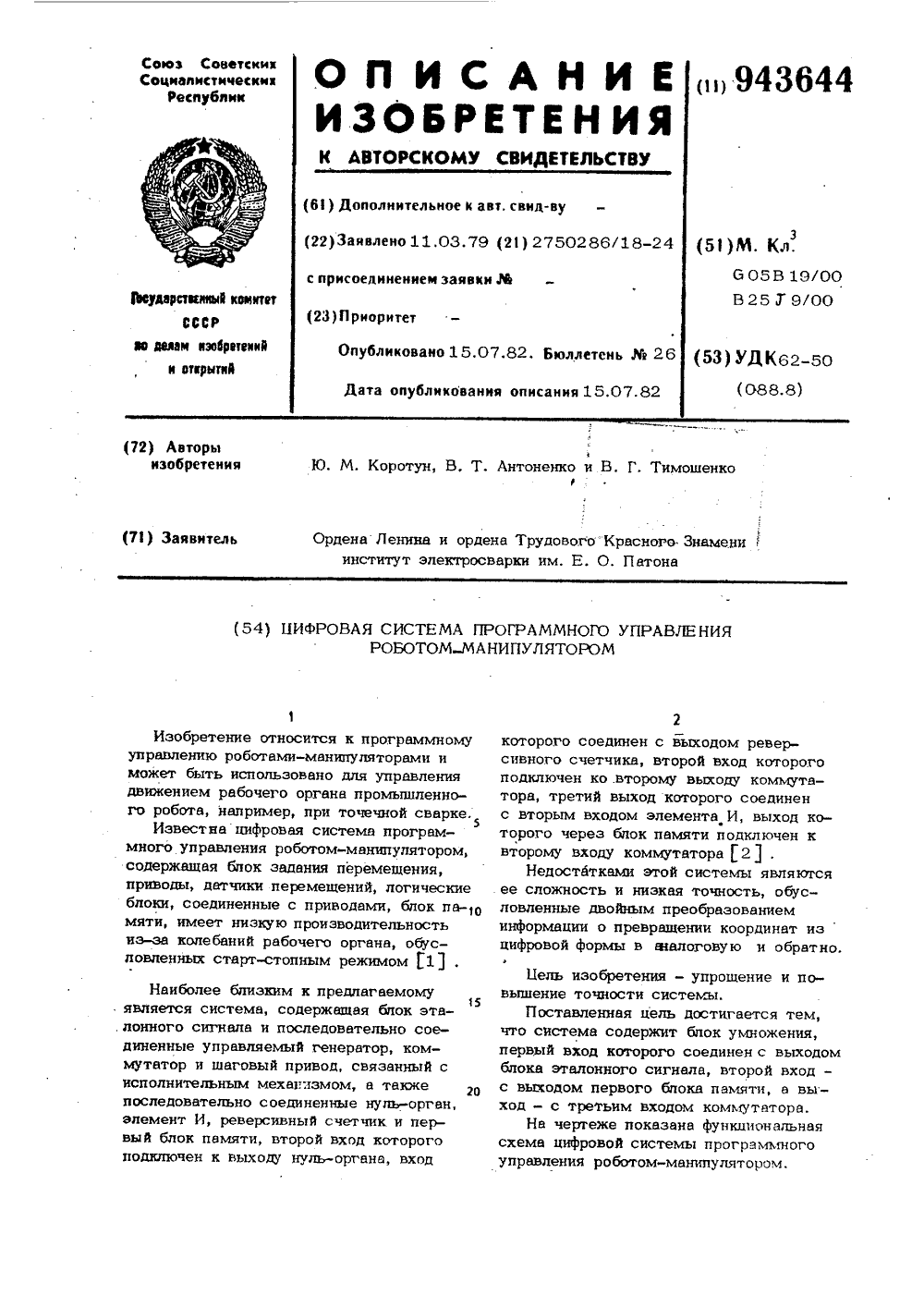
...одновременно на привод 3 и реверсивный счетчик 11, вкотором происходит алгебраическое суммирование информации о перемещениях по данной координате, Чтобы перенести информацию из реверсивного счетчика 11 в блок 6 памяти оператор запускает блок 8 эталонного сигнала, выполненного в виде управляемого по частоте генератора, частота импульсов на выходе которого изменяется оптимальным в смысле какого-либо критерия образом, например, оптимальным в смысле быстродействия исполнительного органа. Частота импульсов блока эталонного сигнала 8поступает в блок умножения 9, где умножается на код, хранящийся в блоке запоминания амплитуды 10, выполненного в виде регистра числа и представляющий собой информацию о величине приращения по данной...
Система управления пневматическим манипулятором

Номер патента: 943647
Опубликовано: 15.07.1982
МПК: G05B 19/44
Метки: манипулятором, пневматическим
...программой упорами 3, С валом 1 жестко связан шаговый (хрвповой) механизм 4,, предназначенный для шагового поворота вала 1, Привод храпового механизма 4 выполнен в виде связанного управляющим распределителем 5 и имеющего полость 6 управления, пневмоцилиндра 7 со штоком 8, штоковая. полость которого постоянно связана с подводом воздуха, а бесштоковая - с выходным каналом распределителя 5, предназначенного дпя подачи давления в бесштоковую полость пневмоцилиндра 7 или соедин ния ее с атмосферой (при подаче сигнала в управляющую полость 6). Система содержит также исполнительные пневмоцилиндры 9 и 10 со штоками, 15 управляемые путевыми распределителями 11 и 12 с пружинным возвратом, имеющими толкатели 13, взаимодействующие с упорами 3, и...
Устройство для управления очувствленным манипулятором

Номер патента: 949629
Опубликовано: 07.08.1982
Авторы: Галямова, Крюков, Улогов
МПК: G05B 11/00
Метки: манипулятором, очувствленным
...усилитель4 на аналого-импульсный преобразователь 5.1При наличии сигнала с датчика 1 на выходе,порогового элемента 2 формируется коман Ода, включающая измеритель 3 межэлектродного сопротивления, и через коммутатор 7с электродов 8 замеряется межэлектродноесопротивление мышц оператора. С выхода измерителя 3 сигнал, соответствующий иэмеренио. 1%му сопротивлению, поступает на элемент 9 памяти, где запоминается. Величина этого сигналаопределяет коэффициент усиления регулируемого усилителя 4, через который проходит сигнал от датчика 1 к аналого. импульсному преобразователю 5, С выхода аналого-импульсногопреобразователя 5 импульсы поступают на другой вход элемента 9 памяти, отключая его отизмерителя 3 передним фронтом импульса иобнуляя и...
Устройство для управления дистанционным манипулятором

Номер патента: 950519
Опубликовано: 15.08.1982
МПК: B25J 11/00
Метки: дистанционным, манипулятором
...органа. Разностный сигнал спервого сумматора 1 подается на входпривода (блоки 3, 13 и 14) исполнительного органа через блок 2 умножения. Вал исполнительного органапри этом вращается со скоростью,пропорциональной разности моментовна валах исполнительного и задающего органов в масштабе, определяемомвыходным сигналом преобразователя12. Электропривод 6 органа осуществляет слежение углового положениявала задающего органа за положениемвала исполнительного, Слежение происходит под действием сигнала совторого сумматора 5, сравнивающего сигналы с датчиков 9 и 4 угла задающего и исполнительного органов.Датчик 10 тока якоря электропривода 6 задающего органа вырабатываетсигнал, пропорциональный абсолютнойвеличине тока якоря...
Устройство для управления манипулятором

Номер патента: 960723
Опубликовано: 23.09.1982
Авторы: Андрюнин, Кулешов, Лысенко, Моисеенков, Шведов
МПК: G05B 11/00
Метки: манипулятором
...датчик 4 усилий, блок 5 сумматоров, блок 6 аста"тического управления, приводы 7 ис вполнительного органа.Устройство работает следующим образом,Пусть на исполнительный орган 1не действуют внешние усилия, тогда 1%сигналы датчика 4 усилий равны нулю.Для перемещения исполнительного органа 1 в требуемом направлении опе- .ратор должен приложить к задающемуоргану 2 определенное усилие в этомнаправлении. Приложенное усилие вызовет появление сигналов с датчика3 усилий, которые проходят через блок5 сумматоров на соответствующие входыблока 6 астатического управления. За"хват манипулятора будет двигатьсяпри этом со скоростью, величина и направление которой определяются усилием оператора на задающем органе 2.Если же на захват манипулятора...
Устройство для программного управления манипулятором

Номер патента: 966666
Опубликовано: 15.10.1982
Авторы: Гуревич, Пахомова, Ханин
МПК: G05B 19/418
Метки: манипулятором, программного
...командных шины ишину ответа, т.е, при М канальной связиимеется всегоМ ответных шин, Ответнаяшина в зависимости от состояния каждойединицы технологического 5 оборудованиякоммутируется на одну из частотно-несущихлиний, что и определяет тип передаваемогов устройство ответа от технологического оборудования, Обращение инициируется появлением на входах дешифратора 2 кода номераканала связи. Сигналами в унитарном коде свыходов дешифратора управляется коммута.тор 3. На выходной командной шине выбранного коммутатора организуется сигналкоманды на ТО, а также подготавливаетсяприем и передача только по определенномуканалу ответного сигнала от ТО, т,е, осуществление дуплексного режима работы спрограммируемой селекцией канала,Сигнал ответа, принятого...
Устройство для управления манипулятором

Номер патента: 970310
Опубликовано: 30.10.1982
Автор: Жавнер
МПК: G05B 11/00
Метки: манипулятором
...через механизм двойного параллелограмма 21, связан с основанием 19. Ведущий орган - шарнир механизма пантографа связан с осью шарнирного соедиг 25 нения гидроцилиндров 22 и 23, На осях шарнирного соединения гидроцилиндров с основанием установлены синусно-косинусные датчики 24-26, а на цилиндре 8 - датчик 27 линейного перемещения, С датчика 1 поступает управляющий сигнал О, соответствующий требуемому значению координаты Х, с датчика 10 - сигнал 0, пропорциональный длине гидроцилиндра 22, поступает на обмотку возбуждения синус- но-косинусного преобразователя. С косинусного выхода датчика 13 на вход сумматора 2 поступает сигнал О 1 Сас(л а с выхода сумматора 2 - сигнал О,- "01 со 5 ол), который поступает на вход нйе обмотки...
Устройство для управления дистанционным манипулятором

Номер патента: 974332
Опубликовано: 15.11.1982
Авторы: Васильев, Гладских, Калинин, Кузьмин, Кулешов, Шабаршов, Ядыкин
МПК: G05B 11/00
Метки: дистанционным, манипулятором
...и управляемый коммутатор, информационный вход которогоподключен к выходу акселерометра, а5выходы - ко входам масштабного усилителя.На чертеже представлена функциональная схема устройства,Устройство содержит акселерометр 1,зоуправляемый коммутатор 2, масштабныйусилитель 3, привод 4, инструмент 5,датчик 6 захвата инструмента, исполнительный механизм 7.аз 8699/65 Тираж 914 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д.род, ул. Проектная, 4 Патент",илиад П 3 97433Устройство работает следующим образом.При отсутствии инструмента 5 в охвате исполнительного органа сигнал с акселерометра 1 поступает в управляемый коммутатор 2 усилителя 3, где усиливается масштабным...
Устройство для программного управления многокоординатным манипулятором

Номер патента: 985762
Опубликовано: 30.12.1982
Автор: Шерстобитов
МПК: G05B 19/045, G05B 19/18
Метки: манипулятором, многокоординатным, программного
...первым входом - с выходом,блока памяти, вторйм входом - с вторым выходом логического блока, третий выход которого подключен к перво.му входу мультиплексора, вторым входом соединенного с выходом блока набора, переключателей, а третьими входами - с выходами датчиков положвнин,второй выход блока памяти подключен квходу логического блока.2. Устройство по п.1, о т л и ч а юш е е с я тем, что, аогический блок содержит выключатель, элемент ИЛИ, счетчик номера координаты и последовательносоединенные первый делитель частоты,Ю-триггер, генератор импульсов и второй делитель частоты, выход которогоподключен на 5 -вход й 5-триггера, выход генератора импульсов соединен спервым входом элемента ИЛИ, второйвход которого соединен с...
Устройство для управления копирующим манипулятором

Номер патента: 987573
Опубликовано: 07.01.1983
Авторы: Васильев, Лазуткин, Смирнов
МПК: G05B 11/00
Метки: копирующим, манипулятором
...образом.В исходном несогласованном сос,тоянии манипулятора все регулируе 1 О мые координаты его разомкнуты по положению. Исполнительные двигатели 4 обесточены, а сигнал рассогасования с выхода сумматора 7 через усилители 8 и ключи 9 подается на выходы нуль-органов 11. При перемещении оператором звеньев задающего органа манипулятора и в момент совпадения углового положения любой соответствующей пары звеньев задаю щего исполнительного органов, когда сигнал рассогласования по этому движению равен нулю, на выходе нуль- органа 11 появляется сигнал, переводящий триггер 13 в состояние, при ко тором сигнал с выхода триггера 13, пройдя через релейный усилитель 14, вызывает срабатывание моментного загружателя 2 и фиксирует тем самым положение,...
Система управления манипулятором

Номер патента: 990503
Опубликовано: 23.01.1983
Авторы: Акимов, Артамонов, Баринов, Ведерников, Дьяков, Рубцов, Сафрон, Яскунов
МПК: B25J 5/00
Метки: манипулятором
...и 11, сливные полости которых соединены сливной магистралью с насосми, создающими давление нагнетания жидкости РН. К гидроцилиндрам 7 и 8, выполненйым в виде дозатора, подключены парал лельно вспомогательные гидроцилиндры 12 и 13 небольших размеров, причем дозирующие полости 14 и 15 гидро- цилиндров 7 и 8 подключены к соответствующим по рабочему объему полостям 45 вспомогательных гидроцилиндров 12 и 13. Такое подключение вспомогательных гидропилиншжв 12 и 13 к гидро- цилиндрам 7 и 8 обеспечивает согласованное перемещение штоков гидроцилиндров 7 и 12, 8 и 13 с пропорциональными скоростями. Штоки вспомогательных качающихся гидроцилиндров 12 и 13.и дроссельные следящие золотники 10 и 11 соединены шарнирно с ка чающимися рычагами 16 и 17,...
Устройство для позиционно-скоростного управления манипулятором

Номер патента: 991366
Опубликовано: 23.01.1983
МПК: G05B 11/00
Метки: манипулятором, позиционно-скоростного
...импульса разрешения с выходов элементов 27 памяти новые значения компонент записанного сигнала подаются на инвертирующие входы сумматоров 18,где складываются с текущими значениями компонент сигнала.Полученные результирующие сигналы через ключи 24 поступают на входы интеграторов 19 и далее на первые входы сумматоров 21, на вторые входы которых подаются сигналы с элементов 27 памяти через ключи 20. Суммарный сигнал с выходов сумматоров 21 посту пает на вход вычислительного блока 4 и далее на силовые приводы 5 и испЬлнительный орган 6. При возврате текущих значений компонент векторак значениям, записанным в элемен- О тах 27 памяти, на выходах сумматоров18 напряжения переходят через нулево потенциал, В моменты этого перехода...
Устройство для управления манипулятором

Номер патента: 991367
Опубликовано: 23.01.1983
МПК: G05B 11/00
Метки: манипулятором
...выхода пульта 23 управления этот сигнал поступает на первый вход элемента И 18, на втором входе которого продолжает действовать сигнал На выходе элемента И 18 сигнал совпадения сменяется на сигнал несовпадения, в результате чего под действием ,его ключи 8 и 9 закрываются, а ключ 11 открывается, Сигналс пульта 23 управления и сигнал Ь с блока 17 памяти суммируются:; з сумматоре 19 и усиливаются масштабирующим усилителем 13 с коэффициентом усиления,равным 0,5, после чего на втором входе первого сумматора 12 сигналравен(,+ .2И)=Сигнал жес блока 17 памяти на вход сумматора 12 не поступает,так как ключ 9 закрыт. Закрытие ключа 8 переводит работу схемы в целом в автоколебательный режим, Движение звена при такой структуре схемы управления...
Устройство для циклового управления манипулятором

Номер патента: 991368
Опубликовано: 23.01.1983
МПК: G05B 11/01
Метки: манипулятором, циклового
...5 четвертой координаты 14 и камера управления пневмораспределителя 2 сообщаются с источником пита-. ния сжатым воздухом.50 динаты 14 с источником питания сжатым Пневмораспределители 2 и 5 четвер.той координаты 14 переключаются,.Пневмораспределитель 5 четвертой координаты 14 переключившись, сообщает бесштоковую полость пневмоцилиндра 8 четвертой координаты 14 с источником питания сжатым воздухом, а штоковую полость - с атмосферой.Шток пневмоцилиндра 8 четвертой координаты 14 выдвигается освобождая пневмораспределитель-датчик 10 чет-. вертой координаты 14 и переключая в конце хода пневмораспределительдатчик 9 четвертой координаты 14,Теперь камера управления пневмораспре:делителя 3, камера управления пневмораспределителя 4 и камера...
Устройство для управления сборочным манипулятором

Номер патента: 993198
Опубликовано: 30.01.1983
Авторы: Егоров, Кравченко, Лакота
МПК: G05B 11/00
Метки: манипулятором, сборочным
...суммато1, первый усилитель 2, первый блок 3коррекции, второй сумматор 4, второйусилитель 5, второй блок 6 коррекции,задатчик 7 скорости, коммутатор 8,привод 9, исполнительный механизм 10,датчик 11 скорости, датчик 12 усилия,инвертор 13, третий сумматор 14, элемент 15 с односторонней проводимостью, селектор 16, задатчик 17 усилия,задающий орган 18.Устройство работает следующим образом,С задатчика 7 скорости поступаетсигнал на отработку приводом 9 заданной скорости для исполнителйного механизма 10. Исполнительный механизм 10представляет собой исполнительный орган манипулятора, содержащий силовойредуктор, схват и т.д. Этот сигнал, вычитая сигнал с датчика 11 скорости,поступает через усилитель 2, блок 3коррекции, и коммутатор 8, на привод9....
Рукоятка управления манипулятором

Номер патента: 996039
Опубликовано: 15.02.1983
МПК: B21J 13/10
Метки: манипулятором, рукоятка
...9,Верхнее звено пантографа 6 представляет собой корпус, в котором смонтирован люнет 10. Зубчатый сектор, нарезанный на люнете 10, сцеплен с шестерней третьего блока потенциометра 11. На осях 12 люнета 10 установлена качалка 13, с которой связана ручка 14 и зубчатый сектор 15, сцепленный с шестерней четвертого блока потенциометра 16. Элементы 10, 12 и 13 образуют двух- координатную карданную подвеску ручки 14.Каждый блок состоит из корпуса 17, в опорах которого расположена ось шестерни 18, на которой жестко закреплены потенциометр 19 и рамка 20 на оси 21.На оси 21 с возможностью свободного вращения смонтирована разрезная втулка 22 с поводками 23 и 24, соединенными с концами предварительно натянутой пружины кручения 25.Концы...
Устройство для управления электрогидравлическим манипулятором

Номер патента: 1022111
Опубликовано: 07.06.1983
Авторы: Агейков, Вельтищев, Кропотов, Малютин, Челышев
МПК: G05B 11/00
Метки: манипулятором, электрогидравлическим
...этогоустройства ограничена классом электрогидравлических приводов, замкнутых по,моменту не выходном валу гидромотораили усилию на исполнительном мвкениэ;ме, Наличие обратнык связей усложняетконструкцию и снижает надежность всего устройства, а реализация устройствас разомкнутыми приводами не позволяетполучить требуемую точность отработкизадающего сигнала при меняющейся ввличи 40нв давления в гидросистеме, так какпри,этом изменяется коэффициент передачи привода. Целью изобретения являетсянне функциональных возможноствройства.Поставленная цель достигаетсчто устройство содержит по, гулируэмой координате сумматордовательно соединенные второйный усилитель, блок деления и блоквлечения квадратного корня, выхрого подключен к входу...
Гидравлическая система управления копирующим манипулятором

Номер патента: 1025927
Опубликовано: 30.06.1983
МПК: F15B 11/20
Метки: гидравлическая, копирующим, манипулятором
...рычагов 1 и 2, шарнирно закрепленные на рычагах 1-4, насос 9,гидробак 10 и шарнирно соединенные сисполнительными рычагами 1 и 2 сило вые цилиндры 11 и 12, подключенные кнасосу 9 и гидробаку 10, через распределители 13 и 14 с управлением отгидроцилиндров - датчиков 5 и 6 рычагов 3 и 4 управления. Гидравлическаясистема снабжена двухсторонним клапаном 15 давления, а распределители 13 и14 выполнены гидроуправляемыми, причемодна полость 16 гидравлического управления одного 14 иэ распределителей 13и 14 соединена с одним 6 иэ гидроцилинаров - датчиков 5 и 6 рычагов управления 3 и 4 через двухсторонний клапан15 давления,Двухсторонний клапан 15 даьпениясостоит из корпуса 17, золотника 18,установленного в корпусе 17 с возможностью осевого...
Устройство для управления копирующим манипулятором

Номер патента: 1030769
Опубликовано: 23.07.1983
МПК: G05B 11/00
Метки: копирующим, манипулятором
...14, первый инвертор 15, нторой иннертор 1 б,первый переключатель17, второй переключатель 18 и триггер 19.Устройство работает следующимобразом.В зависимости от положения переключателей 17 и 18 возможны,три режима Функционирования устройства,В нейтральном положении переклю 1 О чателей 17 и 18 при подаче питанияна схему тритвгер 19 устанавливаетсяв такое состояние, при котором сигнал с его выхода, воздействия науправляющий вход ключа 11, обеспечивает замыкание последнего и подачу сигнала с выхода сумматора 9на вход усилителя 12. В этом случае следящая система работает врежиме копиронания, при которомисполнительный орган 5 повторяет,движения задающего органа 1.Пои переводе переключателей 17и 18 н верхнее положение устройство...