Патенты с меткой «манипулятором»
Устройство для управления дистанционным манипулятором

Номер патента: 1033308
Опубликовано: 07.08.1983
МПК: B25J 11/00
Метки: дистанционным, манипулятором
...в устройство введены последовательно соединенные нелинейный блок и блок умножения, через который выход первого сумматора подключен к входу усилителя, а вход нелинейного блока соединен с выходом датчика .давления.На чертеже представлена функциональная схема предлагаемого устройства.Устройство содержит усилитель 1, гидропривод 2, датчик 3 угла исполнительного органа, первый сумматор 4, электропривод 5, упругий элемент 6, датчик 7 момента, второй сумматор 8, датчик 9 давления, датчик 10 задающего органа, оператор 11, исполнительный орган 12, нелинейный блок 13, блок 14 умножения. 5 О 15 20 25 30 35 40 45 50 55 Устройство работает следующим образом,Перемещая задающий орган по желаемой траектории оператор 1 воздействует на упругий элемент 6....
Устройство для управления астатическим манипулятором

Номер патента: 1037206
Опубликовано: 23.08.1983
Авторы: Ким, Сафонцев, Слуцкий
МПК: G05B 11/01
Метки: астатическим, манипулятором
...21; датчк 22 усилия сжатия задающего органа; второй усилитель 23; пороговый элемент 24; блок 25 управления; третий и четвертый усилители 26 и 27 соответственно; второй и третий ключи 28 и 29 соответственно; источник 30 питания.Блок управления содержит электродвигатель 31; кулачковый электроконтактный механизм 32, первый и второй фоторезистивные делители 33 и 34 соответственно, источник 35 излучения, контакты 36, Фоторезисторы 37, ре зисторы 38.Устройство работает следующим образом.Воздействуя на рукояткй задающего органа, оператор обеспечивает пере мещения элементов исполнительного органа манипулятора со скоростями, пропорциональными величинам относи- тельны% перемещений элементов задающего органа, Эта информация снимается 45 с блока...
Устройство для управления манипулятором

Номер патента: 1041986
Опубликовано: 15.09.1983
Авторы: Барац, Белоцерковский, Жуков, Киклевич, Котенко
МПК: G05B 11/00
Метки: манипулятором
...объект,. находящийся на конвейере 4 и подлежащий. снятйю. При этом блок 2 опре" деления координат объекта по положе" нию указателя 1 непрерывно пересчиты вает текущие координаты по азимуту Р - углу места Е в координаты Х и У и вырабатывает пропорциональные им аналоговые сигналы. Эти сигналы подаются на третий и четвертый входы буферных регистров 10.При совпадении указателя 1 с объектом оператор нажимает кнопку на блоке 14. Логическая единица во втором кольцевом регистре 12 сдвига 1 передвигается на один разряд, при этом на выходе обнуляемого разряда появляется импульс напряжения, кото рый подается, например, в первый бу Ферный регистр 10, По этому сигналу сигналы блока 2 проходят на соответ. ствующие элементы 22 и 23 выборки- хранения,...
Устройство для управления копирующим манипулятором

Номер патента: 1059541
Опубликовано: 07.12.1983
Авторы: Васильев, Коровин, Лазуткин
МПК: G05B 11/00
Метки: копирующим, манипулятором
...- к третьему входу первого коммутатора выход первого сумматора соединен с входом второго компаратора, выходом подклю" 4 енного к второму входу второго коммутатора, третий вход которого через первый компаратор соединен с З 0 выходом первого датчика скорости 1,В этом устройстве в случае нахождения исполнительного органа манипулятора на упоре согласование исполнительного и задающего органон осу ществляется оператором путем поворота задающего органаПри этом ис-тинный нуль рассогласования будет получен лишь н том случае если направление вращения задающего органа 40 производится в направлении, противоположном предшествующему направлению .вращения исполнительного органа. Такой недостаток создает определенные неудобства в работе, а при...
Устройство для управления дистанционным манипулятором

Номер патента: 1061987
Опубликовано: 23.12.1983
Авторы: Березкин, Суслов, Чкалов
МПК: B25J 11/00
Метки: дистанционным, манипулятором
...датчик 2 момента, первый сумматор 3, первый ключ 4, усилитель 5,электрогидроусилитель 6, гидропри" 55вод 7, датчик 8 угла исполнительногооргана, второй сумматор 9, второйключ 10, электропривод 11, оператор12, датчик 13 давления, датчик 14угла задающего органа, нагрузка 15. 60Устройство работает следующимобразом.Фак как оба ключа 4 и 10 могутбыть конструктивно объединенЫ, т.е,могут иметь одну клавишу (Рукоятку) 65 управления, оператор 12 может одновременно замкнуть первый ключ 4, а выход второго ключа 10 подключить к его первому входу. При силовом воздействии оператора 12 на упругий элемент 1, угол закрутки которого за. меряется датчиком 2 момента, вырабатывается сигнал, пропорциональный силовому воздействию оператора 12. Этот сигнал...
Устройство для программного управления манипулятором
Номер патента: 1070511
Опубликовано: 30.01.1984
Авторы: Землянский, Кибальников, Широкоступ
МПК: G05B 19/19
Метки: манипулятором, программного
...входам второго коммутатора, связанного адресным входом с выходом датчика положения манипулятора, стробирующим входом - с пятымвыходом блока памяти, а выходом -с вторым входом сумматора.1070511 510 55 60 65 На фиг. 1 дана блок-схема устройства; на Фиг. 2 и 3 - схемы первого и второго коммутаторов; нафиг. 4 - схема. блока управления.Устройство содержит блок 1 памяти,счетчики 2 циклов, первый коммутатор3, второй коммутатор 4, первые элементы НЕ 5, сумматор б, блок 7 уп-равления, датчик 8 положения манипулятора. Коммутаторы 3 и 4 содержатпо три мультиплексора 9,Блок 7 управления содержит элементы И 10, второй и третий элементыНЕ 11 и 12, схему .13 совпадения,элемент ИЛИ.Одноименные информационные входымультиплексоров 9 образуют...
Устройство для управления манипулятором

Номер патента: 1071994
Опубликовано: 07.02.1984
МПК: G05B 11/00
Метки: манипулятором
...входом к выходу первого формирователя импульсон, выход дифференциального усилителя соединен с входом второгоэлемента с односторонней проводимостью, выход генератора импульсонподключен к вторым входам первогои второго ключей, выходы которыхсоединены соотВетственно с входами перного и второго магнитоэлектрических механизмов. На чертеже представлена функциональная схема предлагаемого устройства. Устройство содержит рукоятку 1, рычаг 2, датчик 3 положения задающей рукоятки первый 4 и второй 5 элементы с односторонней проводимостью, дифференциальный усилитель б, первый 7 и второй 8 магнитоэлектрические механизмы, перный и второй ключи 9 и 10 соответственно, генератор 11 импульсон постоянной ампер-секундной площади, первый и второй...
Устройство для управления манипулятором

Номер патента: 1084725
Опубликовано: 07.04.1984
Авторы: Жавнер, Зинкевич, Карталис, Краснова
МПК: G05B 11/00
Метки: манипулятором
...соединеныс соответствующими выходами задатчика управляющего сигнала, а третий ичетвертый входы третьего сумматораподключены к выходам первого и второ-ЗОго датчиков положения 12 .Недостатком известного устройстватакже является низкая динамическаяточность, в результате чего возможны колебания схвата, изменение его 35угла ориентации относительно горизонтальной плоскости.Цель изобретения - повышение. динамической точности устройства,Указанная цель достигается тем,что устройство для управления манипулятором, содержащее последовательно .соединенные первый датчик положения, первый сумматор, первый электрогидропреобраэователь и первый гидроцилиндр, последовательно включенные.второй датчик положения, второй сумматор, второй...
Устройство для управления манипулятором

Номер патента: 1084726
Опубликовано: 07.04.1984
МПК: G05B 11/00
Метки: манипулятором
...фиг. 1 указаны Х, У, 2 - оси координат, ОА, АВ и В 0 - звенья манипулятора;Я , Ч),(з - углы поворота звеньев; шп - траектория перемещения; ЧА, Чв, ЧВА - векторы ско-ростей соответствующих точек.Устройство содержит источники 1 излучения, приемники 2 излучения, каретку 3, блок 4 сравнения, первый и второй источники 5 и 6 опорного сигнала соответственно, первый привод 7, первый датчик 8 положения, первый сервоусилитель 9, второй привод 10, второй датчик 11.положения, второй сервоусилитель 12, третий привод 13, третий датчик 14 положения, третий сервоусилитель 15, первый и второй синусные вычислители 16 и 17 соответственно, сумматор 18, третий синусный преобразователь 19, первый и второй блоки 20 и 21 делителя, поверхность 22...
Устройство для управления манипулятором

Номер патента: 1093541
Опубликовано: 23.05.1984
Авторы: Джамалов, Сафонцев, Слуцкий
МПК: B25J 13/00
Метки: манипулятором
...датчиков линейных перемещений допол нительных кареток подключены к другому входу каждого из логических усилителей.На фиг, 1 показана кинематическая схема устройства; на фиг. 2 - схема 45 суммирования сигналов датчиков линейного перемешения с помощью логического 1,операционного ) усилителя.Устройство включает основание 1 с направляющими для перемещения 50 одной из дополнительных кареток 2. На основании 1 закреплен потенциометрический датчик 3, подвижный контакт 4 которого размещен на дополнительной каретке 2. Дополнительная каретка 2 содержит направляющие для перемещения второй дополнительной каретки 5. Вторая дополнительная каретка 5 содержит направляющие для перемещения первой основной каретки б. Первая основная каретка б в свою 60...
Устройство для управления дистанционным манипулятором

Номер патента: 1095129
Опубликовано: 30.05.1984
Авторы: Березкин, Ефремов, Левшин, Суслов
МПК: G05B 11/00
Метки: дистанционным, манипулятором
...образом.Работа устройства основана на различии величин скорости изменения.моментов при выполнении манипулятором операций с объектами, имеющими внеш- ние механические связи, и с объектами без этих связей. Так при работе со свободными объектами максимальная величина- ) (скорости изменениядМгпд, вбХмомента, деиствующего на гидропривод 6) не превышает значения где О, - максимальное значение угловой скорости выходного вала гидропринода 6;1 - длина х-го звена;ткМХР - грузоподъемность манипулятора.обВыполнение операций с объектами, имеющими внешнюю механическую связь сопровождается резкими изменениями момента Мп . Значения скорости изменения момента М гп и его сигнала- аналога с датчика 16 давления пропорциональны жесткости механической...
Устройство для управления манипулятором

Номер патента: 1095130
Опубликовано: 30.05.1984
МПК: G05B 11/00
Метки: манипулятором
...блок 10 дифференцирования, сумматор 11.Устройство работает следующим образом.На выходе бпока 8 сравнения формируется сигнал ошибки положения, равный разности входного сигнала и текущего сигнала положения, поступающего с датчика положения, сигнал ошибки по скорости находится в результате дифференцирования сигнала ошибки положения блоком 10. Полученные сигналы усиливаются усилителями 1 и 2, суммируются сумматором 11 и после усиления усилителя 3 поступают на вход сервопривода 5, Сервопривод 5 вращает звено механизма 6 шарнирного манипулятора, с которым механически связан датчик 7. В этой части устройства реализуется преобразование входного сигнала и его скоростной составляющей в управляющий механический момент, приводящий...
Цикловая система программного управления манипулятором
Номер патента: 1097971
Опубликовано: 15.06.1984
Авторы: Ермаков, Петров, Семенов, Соловьев, Трунин
МПК: G05B 19/00
Метки: манипулятором, программного, цикловая
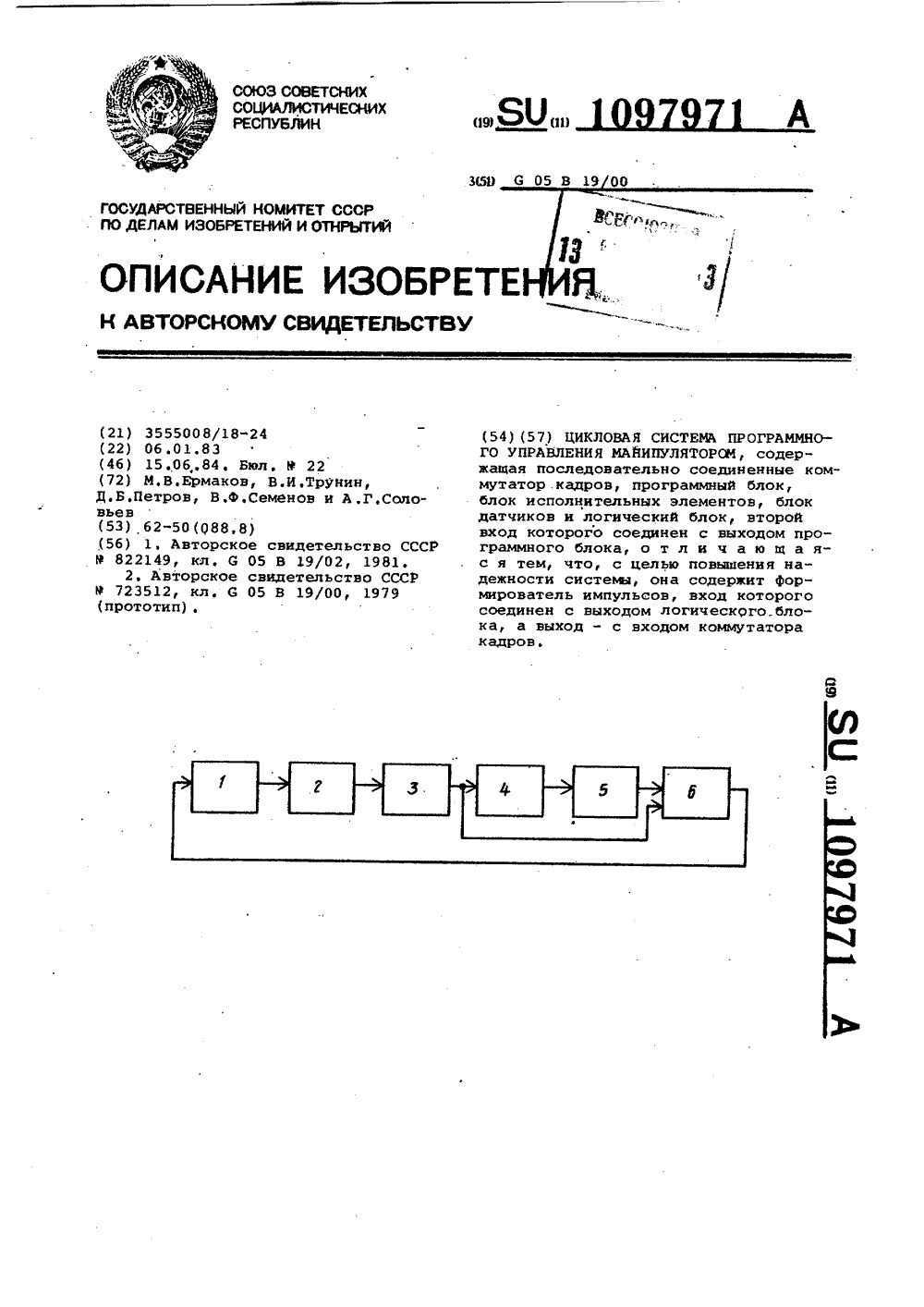
...коммутатор 2 кадров устанавливается иа первый кадр программа, например, сигналом исходной установки по включению питания. Программный блок 3 выдает соот ветствующую первому кадру команду на блок 4 исполнителъных элементов.При исправности исполнительного элемента, соответствующего команде первого кадра, и исправности контролирующего его датчика на выходе логик ческого блока б устанавливается уровень логической единицы. Через некоторое время, необходимое для выполнения исправным исполнительным элементом блока 4 команды, в момент времени С 1 срабатывает соответствующий датчик блока 5 датчиков и на выходе логического блока б появляется уровень логического нуля.Перепад сигнала логического блока б из состояния логической единицы в состояние...
Устройство для управления манипулятором

Номер патента: 1101786
Опубликовано: 07.07.1984
Авторы: Егоров, Новикова, Рябов
МПК: G05B 11/00
Метки: манипулятором
...а выход - к входу вто" рого привода, выход блока астатического управления соединен с входом второго нелинейного элемента.На чертеже представлена функциональная схема устройства.Устройство содержит задающий орган 1, первый датчик 2 момента, первый привод 3, первый датчик 4 положения, сумматор 5, первый нелинейный элемент б, блок 7 астатического управления, второй нелинейный элемент 8, логический блок 9, второй привод 10, второй датчик 11 момента, исполнительный орган 12, тактильный датчик 13, второй датчик 14 положения и ключ 15.Устройство работает следующим образом.Нелинейный элемент б реализует зависимость Е,9 6,1 6,9если ОО 60, ( коэффициент пропорциональностисигналы функциональных блоков;индекс блока-датчика;индекс блока-приемника....
Устройство для управления дистанционным манипулятором

Номер патента: 1112341
Опубликовано: 07.09.1984
Авторы: Бакулев, Березкин, Ефремов, Суслов
МПК: G05B 11/00
Метки: дистанционным, манипулятором
...10, блок 11 коррекции, блок 12выделения модуля, дифференциатор 13,датчик 14 давления, датчик 15 углазадающего органа, задающий орган 16,исполнительный орган 17, электрогидроусилитель 18, усилитель 19.Устройство работает следующим образом.Оператор через задающий срган 16воздействует на упругий элемент 6 исоздает на нем некоторый момент.Датчик 7 момента вырабатывает сигнал,пропорциональный этому моменту. Сигнал с датчика 7 поступает на первыйвход первого сумматора 1, на второйвход которого подается сигнал с датчика 14 давления, пропорциональныймоменту, действующему на исполнительный орган 17. Разностный сигналс первого сумматора 1 подается навход усилителя 19, Исполнительныйорган 17 при этом двигается со скоростью, пропорциональной...
Устройство для управления дистанционным манипулятором

Номер патента: 1120278
Опубликовано: 23.10.1984
Авторы: Березкин, Левшин, Суслов
МПК: G05B 11/00
Метки: дистанционным, манипулятором
...расширение функциональных возможностейустройства путем обеспечения работыманипулятора в рассогласованном положении.Поставленная цель достигается тем, что в устройство введены первый и второй ключи, через которые выход второго сумматора соединен с третьим входом первого сумматора и входом электропривода соответственно.На чертеже дана функциональная схема предлагаемого устройства,Устройство содержит датчики 1 и 2 угла задающего 3 и исполнительного 4 органов, упругий элемент 5, датчик 6 момента, первый сумматор 7, датчик 8 давления, второй сумматор 9, усилитель 10, электрогидроусилитель 11, электропривод 12, гидропривод 13, первый и второй ключи 14 и 15.Устройство работает следующим образом. В режиме копирования производитсявключение...
Устройство для управления манипулятором

Номер патента: 1124248
Опубликовано: 15.11.1984
Авторы: Аболь, Горбатовский, Залькинд, Люманов
МПК: G05B 19/00
Метки: манипулятором
...введены последовательносоединенные блок адреса, блок памятии блок умножения, входы которого соединены с выходами задатчика сигналов, а выходы - с входами приводов,40а входы блока адреса подключены квыходам датчиков положения.На фиг. 1 изображен манипуляторлесозаготовительной машины; нафиг. 2 - функциональная схема устрой 45ства; на фиг. 3 - функциональнаясхема блока умножения; на фиг. 4 -градуированная сетка рабочей зонытранспортных звеньев манипулятора 1на фиг. 5 - границы ячейки рабочейзоны транспортных звеньев манипу 50лятора. Манипулятор лесозаготовительной машины (фиг. 1) содержит основание 1, транспортные звенья 2 и 3 и ориен5 тирующие звенья 4 и 5, которые поворачиваются на углы ЦЙ 2, Й 3 иУстройство для управления...
Способ управления манипулятором

Номер патента: 1127764
Опубликовано: 07.12.1984
Автор: Флейтман
МПК: B25J 9/00
Метки: манипулятором
...между направляющей и выходным звеном, заключающемуся в том, что связь включают периодически в фазе требуемого направления движения направляющей, направляющую в фазе холостого режима движения нагружают эквивалентом нагрузки выходного звена.При этом направляющую нагружают вспомогательной массой, равной массе вы 40 ходного звена.Кроме того, направляющую нагружают дополнительным усилием, равным величине силы сопротивления со стороны выходного звена.На фиг. 1 показан манипулятор, управ ляемый предлагаемым способом; на фиг. 2- средство нагружения колеблющейся направляющей дополнительным усилием.Манипулятор содержит колеблющуюся направляющую, выполненную в виде соединенных между собой вибратора 1 механических колебаний и подвижной...
Устройство для управления манипулятором

Номер патента: 1161914
Опубликовано: 15.06.1985
Авторы: Винокуров, Жарков, Загорский, Исаков
МПК: G05B 11/00
Метки: манипулятором
...четвертым усилителем мощности, четвертым двигателем и четвертым редуктором, 1 З входы последовательно соединенных второго усилителя мощности, второго двигателя, второго редуктора и последовательно соединенных шестого усилителя мощности, шестого двига теля, шестого редуктора соединены с вторым входом первого сумматора, входы последовательно соединенных третьего усилителя мощности, третьего двигателя, третьего редуктора фф и последовательйо соединенных седьмого усилителя мощности, седьмого двигателя, седьмого редуктора соединены с вторым входом второго сумматора, дополнительно введены два 36 блока перекрестных связей и блок согласования, первый и второй выходы которого соединены соответственно с вторыми входами первого и второго...
Устройство для управления копирующим манипулятором

Номер патента: 1164657
Опубликовано: 30.06.1985
МПК: G05B 11/01
Метки: копирующим, манипулятором
...2 к валу задающего механизма1 происходит аналогичным образом,При Отражении усилий В исхОДнОм 4 Оположении все датчики 13, 15 и 16занимают согласованное положение,При приложении момента к валу исполнительного механизма 2 он поворачивается относительно выходного валаредуктора 14 на угол, .определяемыйжесткостью упругого элемента 11 ивеличиной приложенного момента,вследствие чего упругий элемент 11находится в напряженном состоянии.Сигнал рассогласования датчика 16положения и датчика 15 задающейстороны с выхода сумматора 4 задающейстороны через регуляторы 5, 7 и 9поступает на выход двигателя 12.Двигатель 12 через редуктор 14 передает движение до тех пор, пока недостигается новое согласование поло 657 2жения датчика 16...
Устройство для управления манипулятором

Номер патента: 1166054
Опубликовано: 07.07.1985
Авторы: Винокуров, Жарков, Загорский, Исаков
МПК: G05B 11/00
Метки: манипулятором
...управления соединен с входами третьего и седьмого усилителей мощности, с первым входом первого сумматора и входом инвертора, выход которого соединен с входами второго и шестого усилителей мощности и первым входом второго сумматора, второй вход которого соединен с выходом третьего блока управления и вторым входом первого сумматора, выходы первого и второго сумматора соединены соответственно с входами четвертого и пятого усилителей мощности.Вычислительный блок содержит последовательно соединенные четвертый сумматор, масштабный усилитель и пя1166054 4тый сумматор, причем первый, второй инвертор 29, второй сумматор 30,и третий входы вычислительного блока блоки 3 1-34 установления третий сум.Эподключены соответственно к первому , матор...
Устройство для управления дистанционным манипулятором

Номер патента: 1168895
Опубликовано: 23.07.1985
Авторы: Березкин, Левшин, Никитин, Суслов
МПК: G05B 11/00
Метки: дистанционным, манипулятором
...пульта 11 управления воздействует на упругий элемент 6. Датчик 7 момента замеряет деформацию упругого элемента 6, т. е. вырабатывает сигнал, пропорциональный силовому воздействию оператора, который через блок 14 выделения модуля поступает на второй вход блока 5 умножения, управляя его коэффициентом передачи н зависимости от усилия управления, а также на первый вход первого сумматора 4, на второй вход которого подается сигнал с датчика 9 давления, пропорциональный силовому воздействию исполнительного органа 12 и его нагрузки. Разностный сигнал с выхода первого сумматора 4, который в установившемся режиме пропорционален скорости движения исполнительного органа 12, управляет через усилитель 1 и электрогидроусилитель 16 гидроприводом 2....
Устройство управления манипулятором

Номер патента: 1168898
Опубликовано: 23.07.1985
Авторы: Вешников, Градецкий, Рачков
МПК: G05B 19/18
Метки: манипулятором
...расположенным над поверхностью, соответствует расстоянию до поверхности, а в канале с соплом, расположенным за кромкой оно минамально. При отклонении в ту или другую сторону давления в одном из каналов соответственно изменяются. Точность позиционирования датчика в каждом конкретном случае зависит от расстояний между соплами и от рабочего расстояния каждого сопла до поверхности детали, которые точно настраиваются с помощью .зеханизма 17 регулирования взаимного расположения сопл. Давления в измерительных каналах 12 передаются через выходные пневматические сопротивления 14, пневмоэлектрическцй преобразователь в блок 7 оценки ситуаций и блок 8 хранения и реализации программ, которые преобразуют информациоцнье пневматические сигналы в сигналы...
Устройство управления манипулятором для приема и перегрузки паковок

Номер патента: 1222611
Опубликовано: 07.04.1986
Авторы: Миронов, Рабкин, Семенов, Этин
МПК: B65H 67/04, B65H 67/06
Метки: манипулятором, паковок, перегрузки, приема
...вход переключателя 1 режима работы соединен с датчиком наличия З 5 паковки на каретке, выполненным в виде концевого выключателя 6, штока 7 с управляющим элементом 8, закрепленным на одном конце штока 7, подпружиненного с помощью пружины 9 сжатия в упорах 10 и 1. Шток 7 установлен на паковкодержателе 12 с возможностью возвратно-поступательного переме. щения в направляющих 13. Привод 5 каретки 14 размещен (фиг. 2) на платформе 15 манипулятора, уста новленной между транспортным средством 16 и шпулярником 17 машины. На платформе 15 закреплена поворотная рама 18, на которой установлена с возможностью возвратно-поступательного перемещения по вертикали каретка 14.50На каретке 14 закреплена переключающая пластина 19 для воздействия...
Устройство для управления манипулятором

Номер патента: 1226406
Опубликовано: 23.04.1986
Авторы: Березкин, Городецкий, Суслов
МПК: G05B 11/00
Метки: манипулятором
...(4), осуществляется на основе сигналов датчиков 15момента, описываемых выражениями (3).Для этого выходы датчиков 15 момента подключаются через ключи 16,сумматоры 17, ключи 18 к входам интеграторов 21, благодаря чему навыходах последних устанавливаютсязначения сигналов соответствующихсигналам датчиков 15 момента: на первом выходе - сигналу.0 , , на втопп паром -Ц на третьем -ц.Эм РМСигналы с выходов интеграторов21 поступают на входы усилителей14 выходные сигналы которых формируются согласно выражениям35пл ПР3 ПР 3О =К О =К К К Сова( (овс( 1 (3)ЬЫх 3 лп рм лл рм х к а 1Ъ 3 40где К К и К - коэффициенты пел(л аредачи усилителей 14 координат,1Значения коэффициентов К , Ки К устанавливаются исходя из обес 11 45печения равенства...
Многоканальное устройство для программного управления манипулятором

Номер патента: 1226408
Опубликовано: 23.04.1986
Авторы: Варгин, Михин, Пищугин, Рябушкин, Ткаченко
МПК: G05B 19/00
Метки: манипулятором, многоканальное, программного
...ЭКВИВАЛЕНТНОСТЬ 7 всех регулируемых координат, так как состояния45приводов 5 и их датчиков 6 положениясоответствуют выдаваемым регистром 2 командам на манипулятор.Наличие сигналов логической ."1"на входах элемента И 3 вызывает появ Оление такого же сигнала на его выходе, Логическая "1" с выхода элементаИ 3 поступает на вход счетчика 4 ион, воздействуя на блок 1, переключает программу на следующий кадр. Так Ыкак в новом кадре программы существуот команды, которые еще не отработаныманипулятором, то на входах соответствующих элементов ЭКВИВАЛЕНТНОСТЬпоявляются сигналы разных уровней и на их выходах имеются сигналы ло 1 игического 0 , которые запрещают логическим "0 с выхода элемента И 3 работу счетчика 4 импульсов, удерживая программу на...
Устройство управления манипулятором для приема и перегрузки паковок

Номер патента: 1227582
Опубликовано: 30.04.1986
Авторы: Мачулин, Миронов, Семенов
МПК: B65H 67/02
Метки: манипулятором, паковок, перегрузки, приема
...25 ,(с 111 ИКИ 1, Возврс 1 ТЯ.1 З( схеме управления (фиг.2) обозначен . 3(х 3 цыз(нгз манипулятора (число узлов 13 пгис-,л пуст числу рабочих мест на маши(н 1, ООр й цмссг кнопку 14 вызова, после- В Г., ьи) (Осдиненные элемент 15 памяти и уцрзиляюццй элементб, к входу которого 1-,;ц: Г(; сигнальный элемент 1. Вход эапц, ; и:х(сцт(1 15 памяти соединен с кноп; ц 1 : В Зов)1, а вход сброса - с датм2 щзврата. Выход управляюцсго1 16 1:О;1 клн)ец к соответствующемуО3 м блока 18 управления приво,мзц(улятора подключены датчики 4403 шоростц и остацова.:( .: ( (О,и ржит узел сброса Выхода,:к 1 ИГ (ц)и . выходу датчика 5 остаг.Си ук)пиий 2 О и управляющий 21 ;, 1(ы, со(дццеццые с приводом 6, 45В л( х Од,;м по и,Вени Р приводыО выи,ки( ь ц...
Устройство для управления манипулятором

Номер патента: 1229719
Опубликовано: 07.05.1986
Авторы: Егоров, Рассказчиков
МПК: G05B 11/00
Метки: манипулятором
...на неподвижном предмете, при этом не имеет значения находится в схвате шлифовальный круг или деталь. Привод второй координаты является обычным следящим приводом,ицвариантцым к внешним возмущаю)цим воздействиям. В этом случае достатоцно определить положение схвата только по первой координате и сравнить с требуемым. Оценка осуществляется по функции положения Е = Х 1 - Х 3, где Х, - требуемое значение координаты; Хдействительное зцачение координаты (рабочая точка может находиться в любом из 4 квадратов). Если Е)0, то рабочая точка является внешней к требуемому контуру, если Е(0, то рабочая точка является внутренней, Для опреде 5 )о 35 ;)о 25 зо 35 лсция функции Е сигнал с,1 итчика 14 положен)1 я подается на блок 18 выделения модуля,...
Устройство для управления манипулятором

Номер патента: 1229728
Опубликовано: 07.05.1986
Авторы: Кондратенко, Тимченко, Ткаченко
МПК: G05B 19/00
Метки: манипулятором
...- сигналы 1;Соы; п - 1 (1=1, 2, , г).Поскольку многоканальный управляющий блок 4, предназначенный для формирования сигналов, соответствующих желаемому перемещению звеньев исполнительного органа, состоит из каналов, имеющих одинаковое функциональное построение, то его работу рассмотрим на примере к-го канала.На первый вход первого блока 29 умножения поступает сигнал 15 па п - 1 с соответствующего третьего выхода блока 3 вычисления текущих координат, а на второй вход - сигнал Я - Х.) с выхода первого сумматора 10. Выходной сигнал первого блока 29 умножения (Р - Х) Ьйпа х хп - 1 поступает на один из входов сумматора 12, на второй вход которого поступает сигнал (Ру - У.) 1 Сокаа в 1 с выхода второго блока 30 умножения, где он формируется...
Устройство для управления копирующим манипулятором

Номер патента: 1234807
Опубликовано: 30.05.1986
МПК: G05B 11/00
Метки: копирующим, манипулятором
...задающей части, а сигналом задания для задающей части - сигнал с датчика 16 момента, В реэуль,"ате Опе. ратор управляет положением иОл 1- тельного органа 15, ощущая усилия ВОЗНИКаЮЩИЕ В ИСПОЛНИТЕЛЬНОМ ПРИВОЛЕ,Прк соприкосновении исполнительного органа 15 с вцещним объектом например, при выполнении сборочьг 1.1 становачных ог(ераций ца выходе цатчика 17 усилия появляется ск Наспс, который при превьппенкя порога срабать 1 вания порогового элемента 19 переключаег коммутаторы 6 и 11, Пороговый элемент 19 не пропускает сигналы с датчкка 17 усилил меньпе 1 ос,являющиеся помехой и тем самымпредотвращает ложное срабатывание ко)мутаторов. Б.Орые входы первого бь э Ор 0101 коммут 1 торс)В соеиняютС)Л С ВЫХОдас",К. ЗадаОцая СтОраца ПО 11 рсжцему...