Система управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
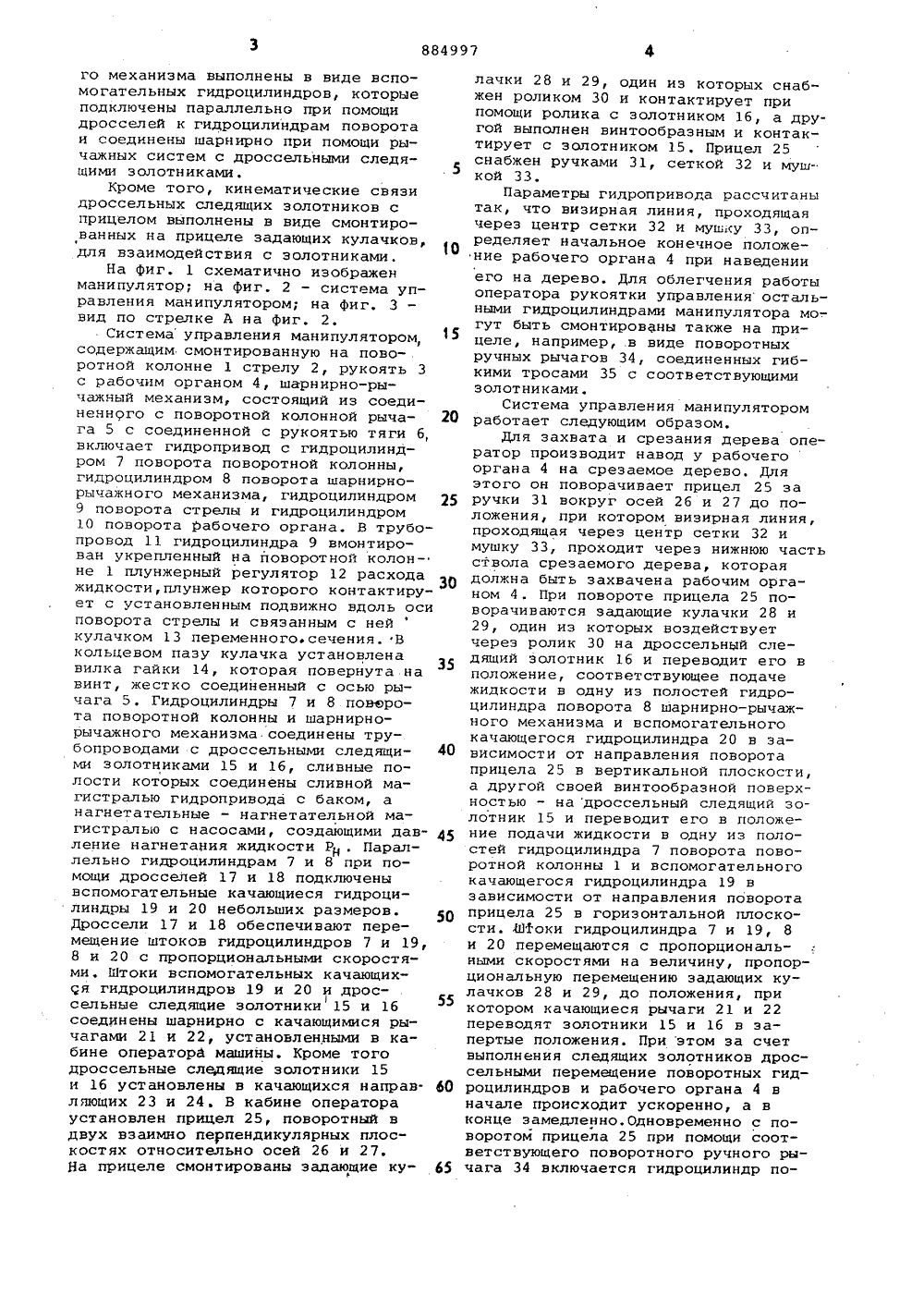
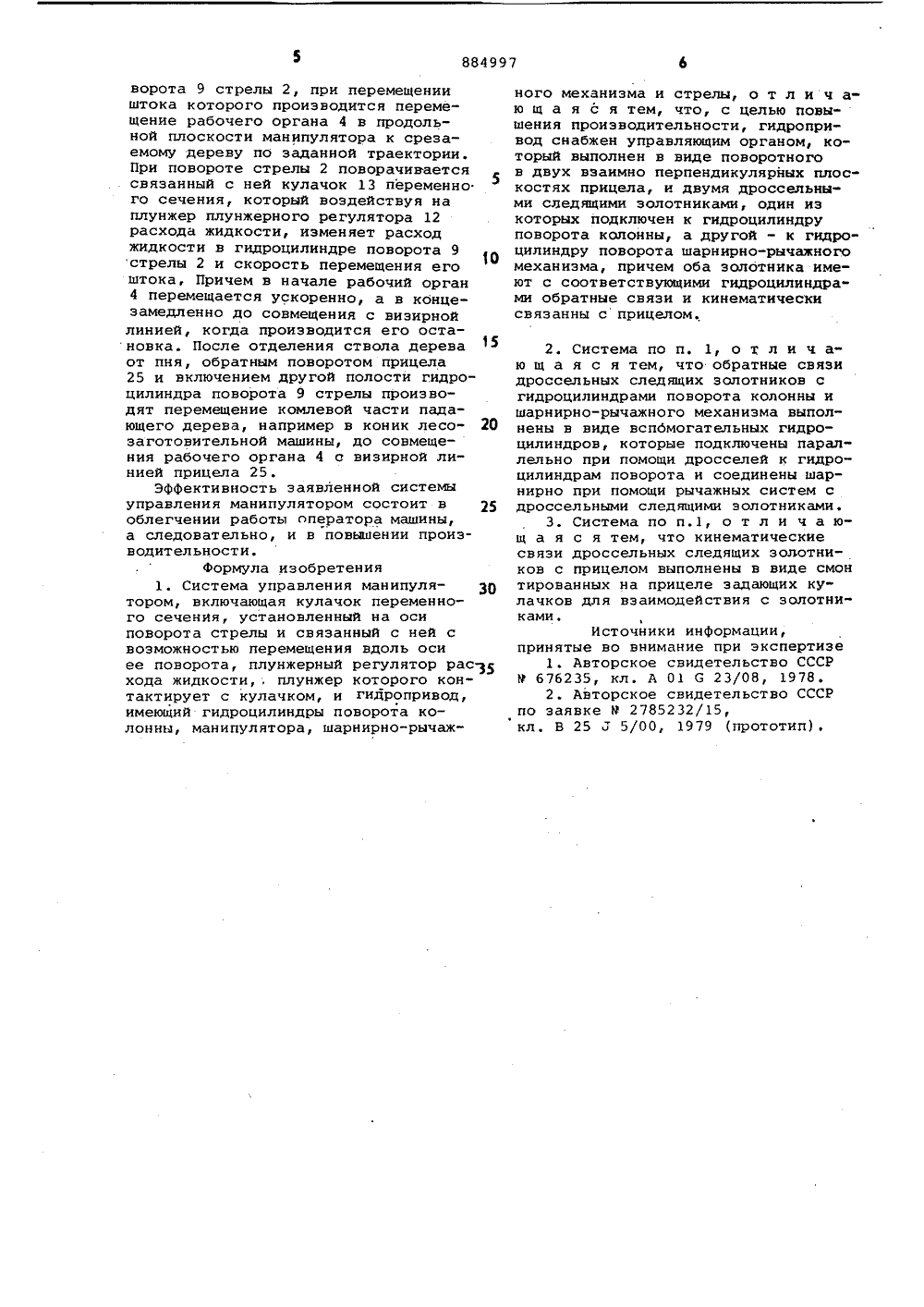
Сфюэ Советских Социалистических Реслублик(22) Заявлено 0606 ВО (21) 2942763/29-15 с присоединением заявки Нов Государственный комитет СССР по делам изобретений и открытий(088.8) Дата опубликования описания 30.1181 Ю.Г. Артамонов, В .Н.Д. Дьяков, В.В.Ф,Г. Сафрон и.М. Рубцов, К.Н. Баринов,Акимов, НП. Яскунов,О.М. Ведерников Ленинградская ордена Ленина лесотехническая академия, .им. С.М. Кирова и Онежский ордена Ленина и орденаОктябрьской Революции тракторный завод(54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ Изобретение относится к системам управления манипуляторами и может быть использовано, например, в лесной промышленности на заготовке леса.Известны манипуляторы, включающие смонтированную на поворотной колонне стрелу с установленным на оси ее поворота кулачком, связанным со стрелой, рукоять с рабочим органом, шарнирно-рычажный механизм соединенный с рукоятью и поворотной колонной, и гидропривод с гидроцилиндрами поворота стрелы, шарнирно-рычажного механизма, рабочего органа и плуыжерным регулятором расхода жидкости, плун жер которого контактирует с кулачком 1).Однако такие манипуляторы не обеспечивают заданные законы перемещения по заданным траекториям на всех выле тах, что повышает их нагруженность при перемещении груза.Известна также система управления манипулятором, включающая кулачок переменного сечения, установленный на25 оси поворота стрелы и связанный со стрелой с возможностью перемещения вдоль оси поворота стрелы гидропривод с гидроцилиндрами поворота поворотной колоннй, шарнирно-рычажного 30 механизма и стрелы и плунжерный регулятор расхода жидкости, плунжер которого контактирует с кулачком 2.Система управления манипулятором такой конструкции не обеспечивает автоматизированного перемещения груза, например срезанного дерева в пространстве, в котором в действительности это перемещение производится, а также быструю и точную наводку рабочего органа на дерево. Это затрудняет работу оператора и снижает производительность труда.Цель изобретения - повышение производительностиС этой целью гидропривод снабжен управляющим органом, который выполнен в виде поворотного .в двух взаимно перпендикулярных плоскостях прицела,. и двумя дроссельными следящими золот никами, один иэ которых подключен к гидроцилиндру поворота колонны,а дру. гой - к гидроцилиндру поворота шарнирно-рычажного механизма,причем оба золотника имеют с соответствующими гидроцилиндрами обратные связи и кинематически связаны с прицелом.Обратные связи дроссельных следящих золотников с гидроцилиндрами поворота колонны и шарнирно-рычажно 8849975 О 15 20 25 30 35 40 45 50 55 60 б 5 го механизма выполнены в виде вспомогательных гидроцилиндров, которые подключены параллельно при помощи дросселей к гидроцилиндрам поворота и соединены шарнирно при помощи рычажных систем с дроссельными следящими золотниками.Кроме того, кинематические связи дроссельных следящих золотников с прицелом выполнены в виде смонтированных на прицеле задающих кулачков, для взаимодействия с золотниками.На фиг. 1 схематично изображен манипулятор; на фиг. 2 - система управления манипулятором; на фиг. 3 вид по стрелке А на фиг. 2.Система управления манипулятором, содержащим смонтированную на поворотной колонне 1 стрелу 2, рукоять 3 с рабочим органом 4, шарнирно-рычажный механизм, состоящий из соединенного с поворотной колонной рычага 5 с соединенной с рукоятью тяги 6, включает гидропривод с гидроцилиндром 7 поворота поворотной колонны, гидроцилиндром 8 поворота шарнирно- рычажного механизма, гидроцилиндром 9 поворота стрелы и гидроцилиндром 10 поворота Рабочего органа. В трубопровод 11 гидроцилиндра 9 вмонтирован укрепленный на поворотной колон - не 1 плунжерный регулятор 12 расхода жидкости,плунжер которого контактирует с установленным подвижно вдоль оси поворота стрелы и связанным с ней кулачком 13 переменного. сечения. В кольцевом пазу кулачка установлена вилка гайки 14, которая повернута на винт, жестко соединенный с осью рычага 5. Гидроцилиндры 7 и 8 поворота поворотной колонны и шарнирно- рычажного механизма соединены трубопроводами с дроссельными следящими золотниками 15 и 16, сливные полости которых соединены сливной магистралью гидропривода с баком, а нагнетательные - нагнетательной магистралью с насосами, создающими давление нагнетаНия жидкости Рн, Параллельно гидроцилиндрам 7 и 8 при помощи дросселей 17 и 18 подключены вспомогательные качающиеся гидроцилиндры 19 и 20 небольших размеровДроссели 17 и 18 обеспечивают перемещение штоков гидроцилиндров 7 и 19, 8 и 20 с пропорциональными скоростями. Штоки вспомогательных качающихся гидроцилиндров 19 и 20 и дроссельные следящие золотники 15 и 16 соединены шарнирно с качающимися рычагами 21 и 22, установленными в кабине оператора машины. Кроме того дроссельные следящие золотники 15 и 16 установлены в качающихся направ. ляющих 23 и 24. В кабине оператора установлен прицел 25, поворотный в двух взаимно перпендикулярных плоскостях относительно осей 26 и 27. Ба прицеле смонтированы задающие кулачки 28 и 29, один иэ которых снабжен роликом 30 и контактирует при помощи ролика с золотником 16, а другой выполнен винтообразным и контактирует с золотником 15 . Прицел 25 снабжен ручками 31, сеткой 32 и мушкой 33.Параметры гидропривода рассчитаны так, что визирная линия, проходящая через центр сетки 32 и муш у 33, определяет начальное конечное положение рабочего органа 4 при наведении его на дерево. Для облегчения работы оператора рукоятки управленияостальными гидроцилиндрами манипулятора мо-. гут быть смонтированы также на прицеле, например, .в виде поворотных ручных рычагов 34, соединенных гибкими тросами 35 с соответствующими золотникамиСистема управления манипулятором работает следующим образом.Для захвата и срезания дерева оператор производит навод у рабочего органа 4 на среэаемое дерево. Для этого он поворачивает прицел 25 за ручки 31 вокруг осей 26 и 27 до положения, при котором визирная линия, проходящая через центр сетки 32 и мушку 33, проходит через нижнюю часть ствола среэаемого дерева, которая должна быть захвачена рабочим органом 4. При повороте прицела 25 поворачиваются задающие кулачки 28 и 29, один из которых воздействует через ролик 30 на дроссельный следящий золотник 16 и переводит его в положение, соответствующее подаче жидкости в одну из полостей гидро- цилиндра поворота 8 шарнирно-рычажного механизма и вспомогательного качающегося гидроцилиндра 20 в зависимости от направления поворота прицела 25 в вертикальной плоскости, а другой своей винтообразной поверхностью - на дроссельный следящий золотник 15 и переводит его в положение подачи жидкости в одну из полостей гидроцилиндра 7 поворота поворотной колонны 1 и вспомогательного качающегося гидроцилиндра 19 в зависимости от направления поворота прицела 25 в горизонтальной плоскости. Широки гидроцилиндра 7 и 19, 8 и 20 перемещаются с пропорциональными скоростями на величину, пропорциональную перемещению задающих кулачков 28 и 29, до положения, при котором качающиеся рычаги 21 и 22 переводят золотники 15 и 16 в запертые положения. При этом за счет выполнения следящих золотников дроссельными перемещение поворотных гидроцилиндрови рабочего органа 4 в начале происходит ускоренно, а в конце замедленно. Одновременно с поворотом прицела 25 при помощи соответствующего поворотного ручного рычага 34 включается гидроцилиндр поворота 9 стрелы 2, при перемещении штока которого производится перемещение рабочего органа 4 в продольной плоскости манипулятора к срезаемому дереву по заданной траектории. При повороте стрелы 2 поворачивается . связанный с ней кулачок 13 переменно. го сечения, который воздействуя на плунжер плунжерного регулятора 12 расхода жидкости, изменяет расход жидкости в гидроцилиндре поворота 9 стрелы 2 и скорость перемещения его штока, Причем в начале рабочий орган 4 перемещается ускоренно, а в конце- замедленно до совмещения с визирной линией, когда производится его остановкаПосле отделения ствола дерева от пня, обратным поворотом прицела 25 и включением другой полости гидро- цилиндра поворота 9 стрелы производят перемещение комлевой части падающего дерева, например в коник лесо заготовительной машины, до совмещения рабочего органа 4 с визирной линией прицела 25.Эффективность заявленной системы управления манипулятором состоит в р 5 облегчении работы оператора машины, а следовательно, и в повышении производительности.Формула изобретения1. Система управления манипулятором, включающая кулачок переменного сечення, установленный на осн поворота стрелы и связанный с ней с воэможностью перемещения вдоль оси ее поворота, плунжерный регулятор рас-у хода жидкости плунжер которого контактирует с кулачком, и гидропривод, имеющий гидроцилиндры поворота колонны, манипулятора, шарнирно-рычажного механизма и стрелы, о т л и ч аю щ а я с я тем, что, с целью повышения производительности, гидропривод снабжен управляющим органом, который выполнен в виде поворотногов двух взаимно перпендикулярных плоскостях прицела, и двумя дроссельными следящими золотниками, один изкоторых подключен к гидроцилиндруповорота колонны, а другой - к гидроцилиндру поворота шарнирно-рычажногомеханизма, причем оба золотника имеют с соответствующими гидроцилиндрами обратные связи и кинематическисвязанны сприцелом,2. Система по п. 1, о т л и ч аю щ а я с я тем, что обратные связидроссельных следящих золотников сгидроцилиндрами поворота колонны ишарнирно-рычажного механизма выполнены в виде вспбмогательных гидроцилиндров, которые подключены параллельно при помощи дросселей к гидроцилиндрам поворота и соединены шарнирно при помощи рычажных систем сдроссельными следящими золотниками,3. Система по п.1, о т л и ч а ющ а я с я тем, что кинематическиесвязи дроссельных следящих золотников с прицелом выполнены в виде смонтированных на прицеле задающих ку"лачков для взаимодействия с золотниками.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 67 б 235, кл. А 01 С 23/08, 1978.2. Авторское свидетельство СССРпо заявке Р 2785232/15,кл. В 25 й 5/00, 1979 (прототип), 8849971130 ПП ф ф Патентф, г. ужгород, ул. Проект Фил Редактор Е. Лушников ТиражГосударселам изобсква, Ж 93енн огоетенийРаушс Подписномитета СССРоткрытийянаб., д, 4
СмотретьЗаявка
2942763, 06.06.1980
ЛЕНИНГРАДСКАЯ ОРДЕНА ЛЕНИНА ЛЕСОТЕХНИЧЕСКАЯ АКАДЕМИЯ ИМ. С. М. КИРОВА, ОНЕЖСКИЙ ОРДЕНА ЛЕНИНА И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ ТРАКТОРНЫЙ ЗАВОД
АРТАМОНОВ ЮРИЙ ГЕОРГИЕВИЧ, РУБЦОВ ВАСИЛИЙ МАКСИМОВИЧ, БАРИНОВ КОНСТАНТИН НИКИТОВИЧ, ДЬЯКОВ НИКОЛАЙ ДМИТРИЕВИЧ, АКИМОВ ВЯЧЕСЛАВ ВАСИЛЬЕВИЧ, ЯСКУНОВ НИКОЛАЙ ПАВЛОВИЧ, САФРОН ФЕЛИКС ГЕНРИХОВИЧ, ВЕДЕРНИКОВ ОЛЕГ МАКСИМОВИЧ
МПК / Метки
МПК: B25J 5/00
Метки: манипулятором
Опубликовано: 30.11.1981
Код ссылки
<a href="https://patents.su/5-884997-sistema-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления манипулятором</a>
Механизм поворота стрелы манипулятора

Номер патента: 581257
Опубликовано: 25.11.1977
Авторы: Велижанина, Дворников, Краснов
МПК: E21D 9/10
Метки: манипулятора, механизм, поворота, стрелы
...стрелы манипулятора,нагнетательный цилиндр 1 и винт 2, соединенный с валомдвигателя 3. Винт 2 составляет с эк- ЗО сцентрично размещенным относительно,него поршнем-гайкой 4 самотормоэящуювинтовую кинематическую пару. Поршеньгайка 5 цилиндра б винтодомкрата составляет с винтом 7 несамотормоэящуювинтовую кинематическую пару, Полости А, А нагнетательного цилиндра 1и цилиндра б соединены между собой трубопроводом 8 с размещенным в нем краном 9, а полости Б, Бсообщаются черезподшипниковый узел 10. При включении двигателя 3 вращате ное движение винта 2 преобразуется в поступательное движение поршня 4. Вы тесняемая, например, из полости А ци линдра 1 рабочая жидкость нагнетаетс в полость А цилиндра б. Под давлени ем жидкости в полости А...
Механизм поворота стрелы манипулятора

Номер патента: 697710
Опубликовано: 15.11.1979
Авторы: Велижанина, Гудимов, Дворников, Краснов, Мордачев, Шилов
МПК: E21D 9/10
Метки: манипулятора, механизм, поворота, стрелы
...1,,цежность н большими г.бар,1 ы,пили идракСущность изобретения итежом, где показан разрезмеханизма,Механизм состоит из кронштейна 1,винта 2, поршня 3, винтовой полумуфты4, гидроаилиндра 5, внешней 6 и внутренней 7 подщипниковых опор, трубо- .проводов 8 и 9. Винт 2 жестко закреппен в кронштейне 1 н образует с поршнем 3 внутреннюю винтовую кинематическую пару. Внешней винтовой нарезкойпоршень 3 входит в винтовую кинематическую пару с полумуфтой 4, которая сгидроцилиндром 5 кинематической парыне образует, Гидроцчлиндр 5 одной стевроной опирается на внешнюю обойму подшипника 6, установленного внутри цилиндра на цапфе винта 2, а второй сто697710 0 Составитель О. СобинТехред С. Мигай Редактор Т. Авдейчик Корректор И, Михеева Заказ 6898/23...
Механизм поворота стрелы манипулятора буровой машины

Номер патента: 998748
Опубликовано: 23.02.1983
Авторы: Буравлев, Гандельсман, Зубарев, Лозовский
МПК: E21D 9/10
Метки: буровой, манипулятора, механизм, поворота, стрелы
...(винта) - на внешней поверхности (на один виток больше, чем у наружного цилиндра и.образующие обшийканал, в которыми помещены шарики 8,причем крайние витки гайки соединеныобводной трубкой 9 для шариков 8.Внутренний цилиндр 7 жестко закреплен к стреле 1 и служит своей внутренней поверхностью корпусом силового гидроцилиндра с поршнем 10,шток 11 которого жестко закреплен998748 иг. лиал ППП фПатент",Ужгород, ул.Проектна к подвижному наружному цилиндру б, а к нему крепится вертлюг 4.Поворот буровой машины вокруг продольной оси манипулятора происходит следующим образом.Прн подаче рабочей жидкости в . поршневую полость гидроцилиндра 7 через отверстие (не показано) в штоке 11 поршень 10 перемещается поступательно. Через шток 11 поступательное...
Механизм поворота стрелы манипулятора

Номер патента: 588361
Опубликовано: 15.01.1978
Авторы: Балабуркин, Мауленкулов, Моргачев
МПК: E21D 9/10
Метки: манипулятора, механизм, поворота, стрелы
...их расположении происходит уменьшение габаритов механизма вращения. ормула изобретени Меха включа и крыш лен вал с внутр Изобретение относится к горной промышенности, в частности к механизмам поворотрелы манипулятора буровых устройств. Известен механизм поворота стрелы манипулятора, включающий поршневой домкрат, соединенный своей подвижной частью с винтом, несущим гайку с участками самотормозящей и несамотормозящей резьбы, с последним из которых взаимодействует резьбовой элемент, связанный через пару винт - гайка с поворотным кожухом ЦОднако этот механизм имеет большие размеры.Наиболее близким к предлагаемому по технической сущности и достигаемому результату является механизм поворота стрелы манипулятора, включающий кронштейн,...
Механизм поворота стрелы манипулятора

Номер патента: 694634
Опубликовано: 30.10.1979
Авторы: Велижанина, Дворников, Краснов, Мордачев
МПК: E21D 9/10
Метки: манипулятора, механизм, поворота, стрелы
...мсханиз 15 выполнены одного направления.На фиг, 1 изображен винтоповоротньимеханизм; на фиг, 2 - схема процесса с- мотор можения.Механизм состоит из вала 1, выполнен 20 ного в виде многозаходного винта, жесткоскрепленного с основанием 2, поршня 3, поворотной втулки 4, гидроцилиндра 5 скрышкой 6, размещенного в,подшнпниковых опорах 7,и 8, На штоке 9 поршня 325 выполнены две винтовые нарезкИ днонаправления, образующие с валом 1 н поворотной втулкой 4 две винтовые кннематические пары 10 и 11.Втулка 4 имеет внутреннюю,нарезку,30 выполниопдо функции ходовой гайки Вин.тового механизмаи жестко скрепя:на с кронштейном 12, несущим стрелу манипулятора (на чертеже не показана).Механизм поворота стрелы манипулятора работает следующим образом.При...
Предыдущий патент: Исполнительный орган манипулятора
Следующий патент: Механизм поворота исполнительного органа манипулятора
Случайный патент: Шихта для изготовления огнеупорногоматериала