Устройство для управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 970310
Автор: Жавнер



Текст
О П И С А Н И Е ИЗОБРЕТЕНИЯ Союз СоветскнхСоцналнстнческнхРеспублик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 13.04. 81 (21) 3277192/18-24 Р 1 М. КП. с присоединением заявки М О 05 В 11/00 В 25 Т 13/00 Государственный комитет СССР по делам изобретений и открытий(72) Авторизобретения В.Л.Жавнер Ленинградский технологический институт ",-" холодильной промышленности(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ Изобретение относится к робототехнике и может быть использовано при создании погрузочно-разгрузочных манипуляторов,Известно устройство для управления манипулятором, содержащее эадатчик управляющего сигнала, датчики . перемещения, усилители, гидроприводы и исполнительный механизм 1.Недостатком устройства является сложная конструкция исполнительного механизма.Наиболее близким техническим решением к предлагаемому является устройство, содержащее датчик управляющего сигнала, первым и вторым выходом соединенный с первыми входами первого и второго сумматора соответственно, последовательно соединенные первый усилитель, первый электрогидропреобраэователь и первый гидропривод, связанный с исполнительными механизмом, а также последовательно соединенные второй усилитель, второй электрогидропреобраэователь и второй гидропривод, связанный с исполнительным механизмом 2.Недостатком этого устрОйства является сложность конструкции исполнительного механизма, обусловленнаяналичием горизонтальной направляющей, снижающей маневренность маниПель изобретения - упрощение устройства.Поставленная цель достигается тем,что устройство содержит первый и второй синусно-косинусный преобразователи и последовательно соединенныесвязанный с первым гидроприводом датчик перемещения и третий синуснокосинусный преобразователь, первыйи второй выходы которого подключенык вторым входам первого и второгосумматора соответственно, выходыкоторых соединены с первыми входами первого и второго синусно-косинусных преобразователей соответственно, и вторыми входами первого ивторого синусно-косинусных преобразователей соответственно, выходамиподключенных к входам соответствующих усилителей.25 На фиг. 1 изображена функциональная схема устройства; на Фиг. 2 кинематическая схема исполнительного механизма.Устройство содержитфиг. 1) эа датчик 1 управляющего сигнала, пер 970310вый 2 и второй 3 сумматоры, первый 4 и второй 5 сумматоры-усилители, первый 6 и второи 7 электрогидро: преобразователи, первый 8 и второй 9 гидроприводы, датчик 10 перемещения, первый 11, второй 12 и тре тий 13 синусно-косинусный преобразователи, исполнительный механизм 14.На фиг. 2 указаны: Гэвенья 15-18 исполнительного механизма 14, основание 19, рабочий орган 20, механизм 10 21 двойного параллелограмма, гидро- цилиндры 22 и 23, синусно-.косинусные преобразователи 24-26,датчик 27 пе.ремещения.Устройство работает следующим об разом.Исполнительный механизм состоит из механизма пантографа, образованного из звеньев 15-18, один из шарниров которого закреплен на основании 19. 2 О Рабочий орган 20 кинематически, через механизм двойного параллелограмма 21, связан с основанием 19. Ведущий орган - шарнир механизма пантографа связан с осью шарнирного соедиг 25 нения гидроцилиндров 22 и 23, На осях шарнирного соединения гидроцилиндров с основанием установлены синусно-косинусные датчики 24-26, а на цилиндре 8 - датчик 27 линейного перемещения, С датчика 1 поступает управляющий сигнал О, соответствующий требуемому значению координаты Х, с датчика 10 - сигнал 0, пропорциональный длине гидроцилиндра 22, поступает на обмотку возбуждения синус- но-косинусного преобразователя. С косинусного выхода датчика 13 на вход сумматора 2 поступает сигнал О 1 Сас(л а с выхода сумматора 2 - сигнал О,- "01 со 5 ол), который поступает на вход нйе обмотки синусно-косинусных преобразователей 11 и 12. Тогда с выхо- да преобразователя 11 на выход преобразователя 12, на вход усилителя"5 поступает сигнал Я -О 1 со М ) Со 5 с 2 . Указанное соотношение сйгналов преобразуется в выходные скорости гидроприводов 8 и 9 соответственно по зависимстямЧ =К Ч-ИСо 5 А)СО 5 К.1 Х У И Ч = (И-И 1 С 051)05 с,2(Ъпричем указанное соотношение скоростей. соответствует движению оси шарнирного соединеня гидроприводов 8и 9 вдоль оси Х. Если с задаТчика1 на вход сумматора 3 поступает,управляющий сигнал Оу, соответствующийму значению рдаыс выхода сумматора 3 снимается сигнал 1 ОчнА)поступающийна другие входйые обмотки синуснокосинусных преобразователей 11 и.12,и с выхода преобразователя 11 на входУсилителЯ постУпает сигнал Ыу Оли 4) 6 Й 1 Ы, а с выхода преобразователя 12 на вход усилителя 5 поступает сигнал Иу- ОМисаил) Ми с. Указанное соот-, ношение сигналов преобразуется в выходные скорости гидроприводов 8 и 9 соответственно, по зависимостям ч 1 уф Ку (Иу -О 1%1 иА 1) 51 иА 1 и чу"- К у(иу-и 151 и 4)51 и Айри этомось шарйирного соединения гидроцилиндров 22 и 23 перемещается параллельно оси. При совместной подаче управляющих сигналов возможно обеспечение любых заданных траекторий оси шарнирного соединения гидроцилиндров 22 и 23, которое преобразуется с помощью исполнительного механизма в виде пантографа в программное движение рабочего органа 20.Применение изобретения позволит упростить устройство и повысить маевренность исполнительного механизма манипулятора. Формула изобретенияУстройство для управления манипулятором, содержащее задатчик управляющего сигнала, первыми и вто)рым выходом соединенный с первыми входами первого и второго сумматора соответственно, последовательно соединенные первый усилитель, первый электрогидропреобразователь и первыйусилитель первый гидропривод, связанный с исполнительным механизмом, а также последовательно соединенные второй усилитель, второй электрогидропреобразователь и второй гидропривод, связанный с исполнительным механизмом, о т л и ч а ю щ е е с я тем, что, с целью управления устрой-, ства, оно содержит первый и второй синусно-косинусные преобразователии последовательно соединенные связанный с первым гидроприводом датчикперемещения и третий синусно-косинусный преобразователь, первый и второй выходы которого подключены к вторым входам первого и второго сумматора соответственно, выходы которых соединены с первыми входами первого ивтОрого синусно-косинусных преобразователей соответственно и вторыми входами второго и первого синуснокосинусных преобразователей соответственно, выходами подключенных к входам соответствующих усилителей.Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССРР 602366, кл. В 25 Х 9/00, 1977.2. Авторское свидетельство СССРпо заявке М 2918463/00, В 25 У 9/00,1980прототип),970310 Заказ 8387/57. Тираж 914 Подписи ВНИИПИ Государственного комитета ССС по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д, 4
СмотретьЗаявка
3277192, 13.04.1981
ЛЕНИНГРАДСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ХОЛОДИЛЬНОЙ ПРОМЫШЛЕННОСТИ
ЖАВНЕР ВИКТОР ЛЕОНИДОВИЧ
МПК / Метки
МПК: G05B 11/00
Метки: манипулятором
Опубликовано: 30.10.1982
Код ссылки
<a href="https://patents.su/3-970310-ustrojjstvo-dlya-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления манипулятором</a>
Формирователь конечной разности первого порядка огибающей сигнала

Номер патента: 1182416
Опубликовано: 30.09.1985
МПК: G01R 19/00
Метки: конечной, огибающей, первого, порядка, разности, сигнала, формирователь
...Ог )(00 ст а т(аасосисг;цкцтти детектора бгз оттота 0 зпряжеия 11 с а;01)ым )1(зц)5 жги)еь )яф 1 г, 61)емсццые (тиа р(ю.ь рабаты(10 гыт 1)аЗЯТЕЛЬ КОНЕ 1 цай ра. )цас тц арус 1 а порядка Огиб атощей сигналасадгр 1(ит петз 1 зую лино 1 задерк 1 ц/С ТтЭК)(С ЧЯСТОТ Чгт)РЭ Ката)Ы Цг)ЦЫЙ35вход нып 1 тяющеГО устрОйства -"падкл 10 че к выходу первого перег(цажтеля 3вторую .титпцо 6 задержки, вход кота 3 01( С а ЕТ( 1 Ц сап С. Втп; С) "т а ус (,(цТЕ,",яогрятичтт(тя 2 и тзтарым входа Пгр-,тОвОГО 1(01)еьта)ктоля 3 я Рь(хсд подк.юЧг."1 К ПСЗ)НОМУ УХОДУ СУЖЯТО 1)с. 1Вхо)ту дсте(тара 8 гььхад катар ага со=Ь)тОРЬтВ О С СС 1) От)ЯВ(сС;т ТЗтац)З 1 НИЭаЕ )ж;1 (ади-ЦЕН С ВХОДОМ ВТОУОГО ТЕРЕ 0)ЮТСЗтЯ( 9ВОР)ТУ ВкатТУ Ката) СГО тОДК;Тюттсвыход сзтиЯторя 7,...
Формирователь конечной разности первого порядка огибающей сигнала

Номер патента: 1670615
Опубликовано: 15.08.1991
Автор: Лукиных
МПК: G01R 19/00
Метки: конечной, огибающей, первого, порядка, разности, сигнала, формирователь
...линии задержки 1, входом усилителя-ограничителя 2 и первым входом первого пере Ы 2 1670615 А 2(57) Изобретение относится к радиоизмерительной технике и может быть использовано для измерения нестабильности амплитуды измерительных генераторов. Цель изобретения - повышение точности формирования конечной разности первого порядка - достигается введением делителя 11 напряжений, суммирующего блока 13 и фильтра 14 нижних частот, Формирователь также содержит линии 1, 6 задержки, усилитель-ограничитель 2, перемножители 3,9, фильтры 4, 10, вычитающий блок 5, суммирующий блок 7, детектор 8 и источник 12 опорного напряжения, 1 ил,множителя 3. Выход усилителя-ограничителя 2 подключен к второму входу первого перемножителя 3, выход которого через...
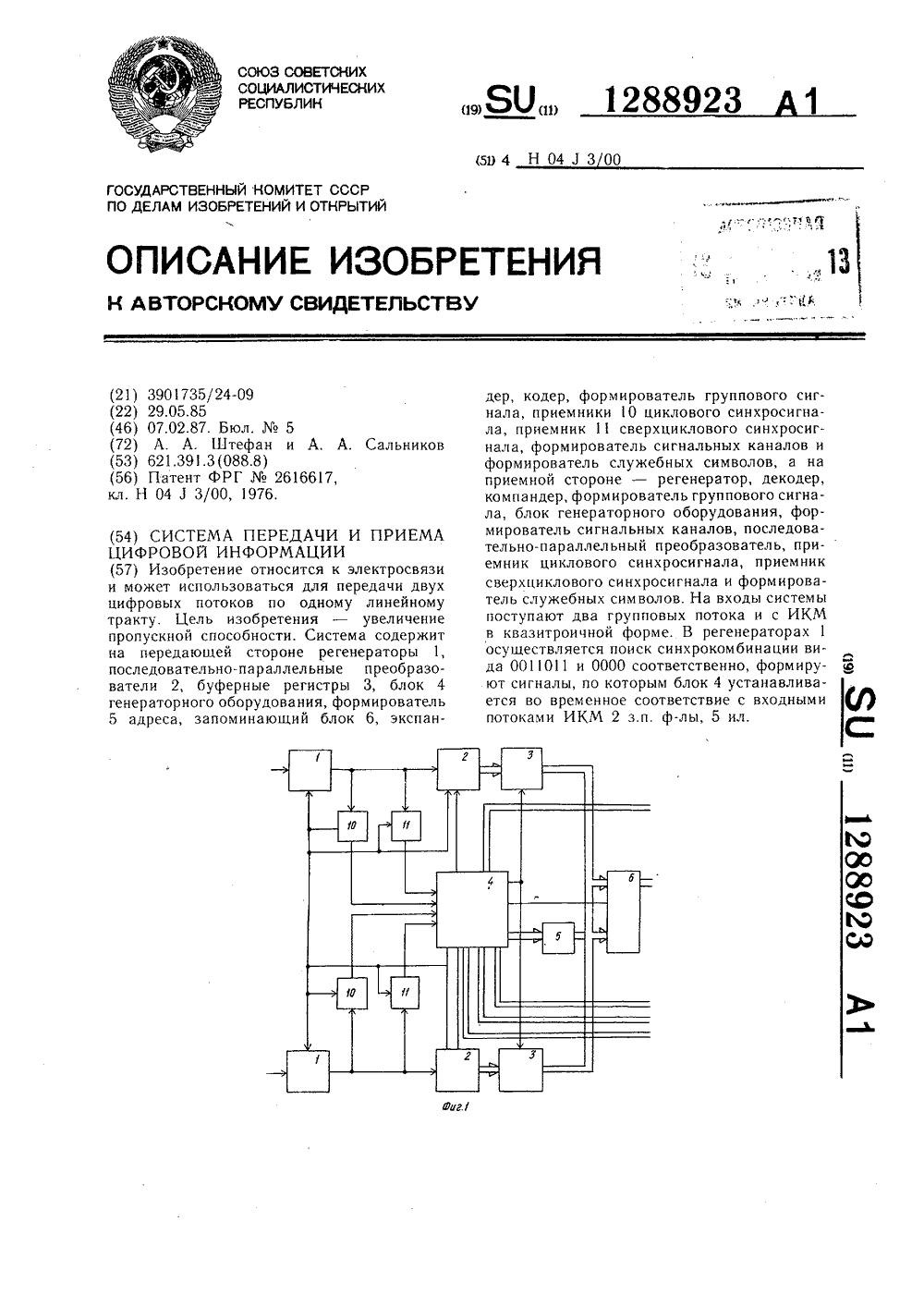
Система передачи и приема цифровой информации
Номер патента: 1288923
Опубликовано: 07.02.1987
МПК: H04J 3/00
Метки: информации, передачи, приема, цифровой
...формирователя 9 осуществляется сигналом управления всех циклов, кроме нулевого. Формирователем 13 служебных символов осуществляется подключение к общей шине формирователя 9 символов циклового (0011011) и сверхциклового (0000) синхросигналов соответственно в нулевых канальных интервалах четных циклов и шестнадцатого канального интервала нулевого цикла. Кроме того, формирователем 9 обеспечивается возможность передачи непреобразованных прозрачных каналов ИКМ, поступающих с выхода запоминающего блока 6.На приемной стороне осуществляется восстановление двоичного цифрового сигнала АДИКМ и выделение тактовой частоты 2048 кГц регератором 14. Цифровой сигнал АДИКМ с выхода регенератора 14 поступает на входы приемников 21 и 22 циклового и...
Устройство сравнения мощности случайных сигналов

Номер патента: 1580271
Опубликовано: 23.07.1990
Автор: Соколов
МПК: G01R 21/00
Метки: мощности, сигналов, случайных, сравнения
...Результат суммирования в интеграторах 3-13-п запоминается соответственно в элементах 4-14-п памяти, на которые вначале поступает импульс стирания предшествующего значения с выхода второго элемента 13-2 задержки (фиг. 2 в,ж), а затем поступает импульс, управляющий записью с выхода третьего элемента 13-3 задержки (фиг. 2 г,ж). Предшествующие значения, записанные в элементах 4-14-п памяти, переписываются соответственно в элементы 6-16"и памяти. Для этого на вторые элементы 6"1;,6-и памяти вначале поступает импульс стирания с выхода генератора 12 тактовых импульсов (фиг. 2 а,з), а затем импульс, управляющий записью с выхода первого элемента 13-1 задержки(фиг.2 б,з). Предшествующее значение и инвертированное в инвертере 5-3 значение...
Устройство для фазирования разнесенных сигналов

Номер патента: 437235
Опубликовано: 25.07.1974
Авторы: Антошкин, Васкевич, Лукашев, Морозов, Россиев, Шигапов
МПК: H04B 7/22
Метки: разнесенных, сигналов, фазирования
...Вход частотного детектора 8 соединен с выходом узкополосного 15 усилителя 9, а его выход через корректирующий усилитель 10 и второй гетеродин 11 соединен с дополнительными смесителями 2, включенными в каждой ветви обработки между входным смесителем 1 и избиратель ным усилителем 3.Поступающий в смеситель 1 сигнал смешивается с частотой сигнала гетеродина 6. Выделенная первая промежуточная частота поступает на вход дополнительного смесителя 2, 25 где с помощью гетеродина 11, общего длявсех ветвей обработки, образуется вторая промежуточная частота, Затем сигнал поступает на вход сумматора 7 и через избирательный усилитель 3 - на вход фазового деЗ 0 тектора 4, на второй вход которого поступает437235 Составитель Г. Челей Техред В....
Предыдущий патент: Сравнивающее устройство
Следующий патент: Релейный регулирующий прибор
Случайный патент: Способ поисков алмазоносных кимберлитовых трубок