Система управления объектом с присоединенным упругодеформируемым элементом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
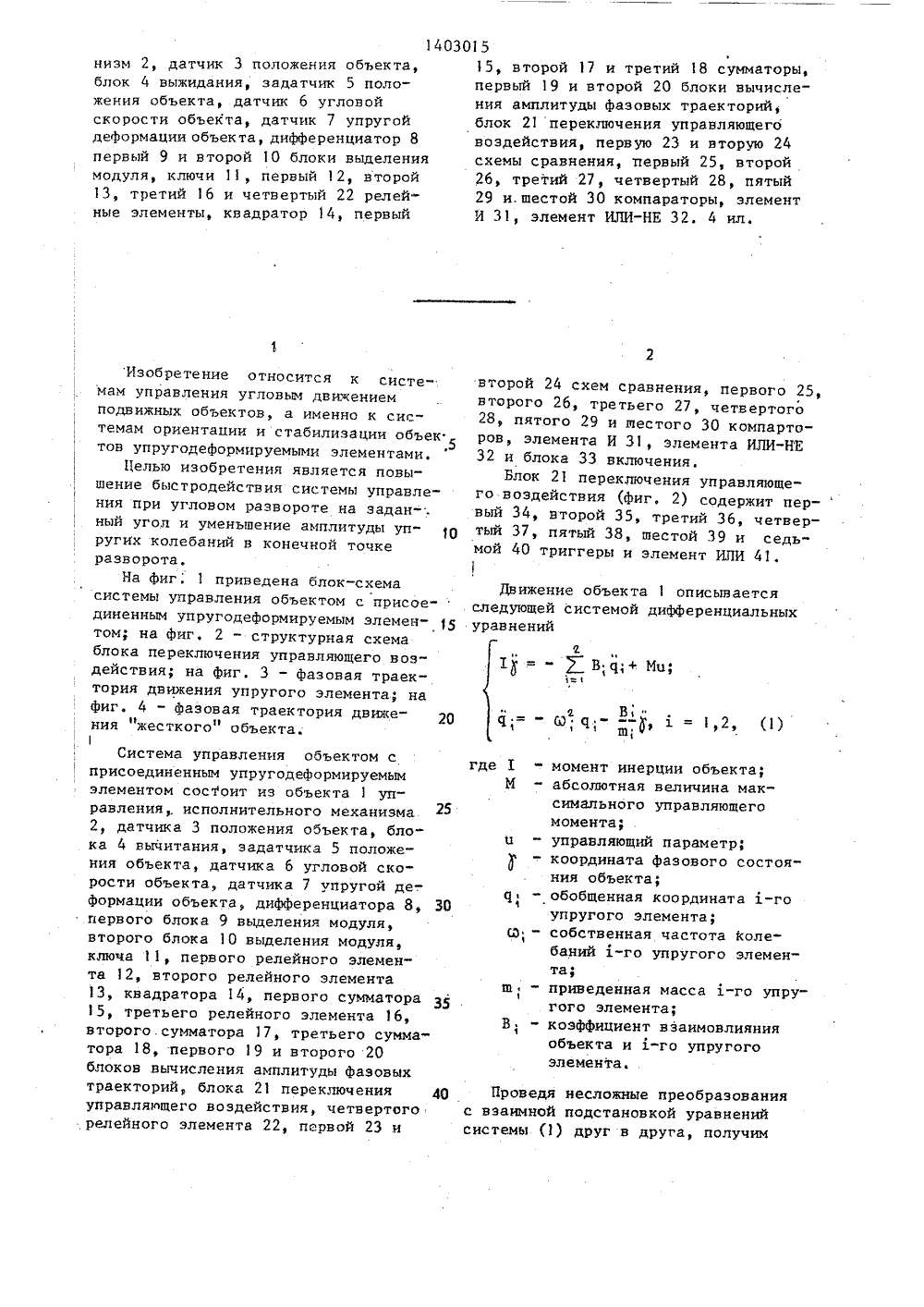
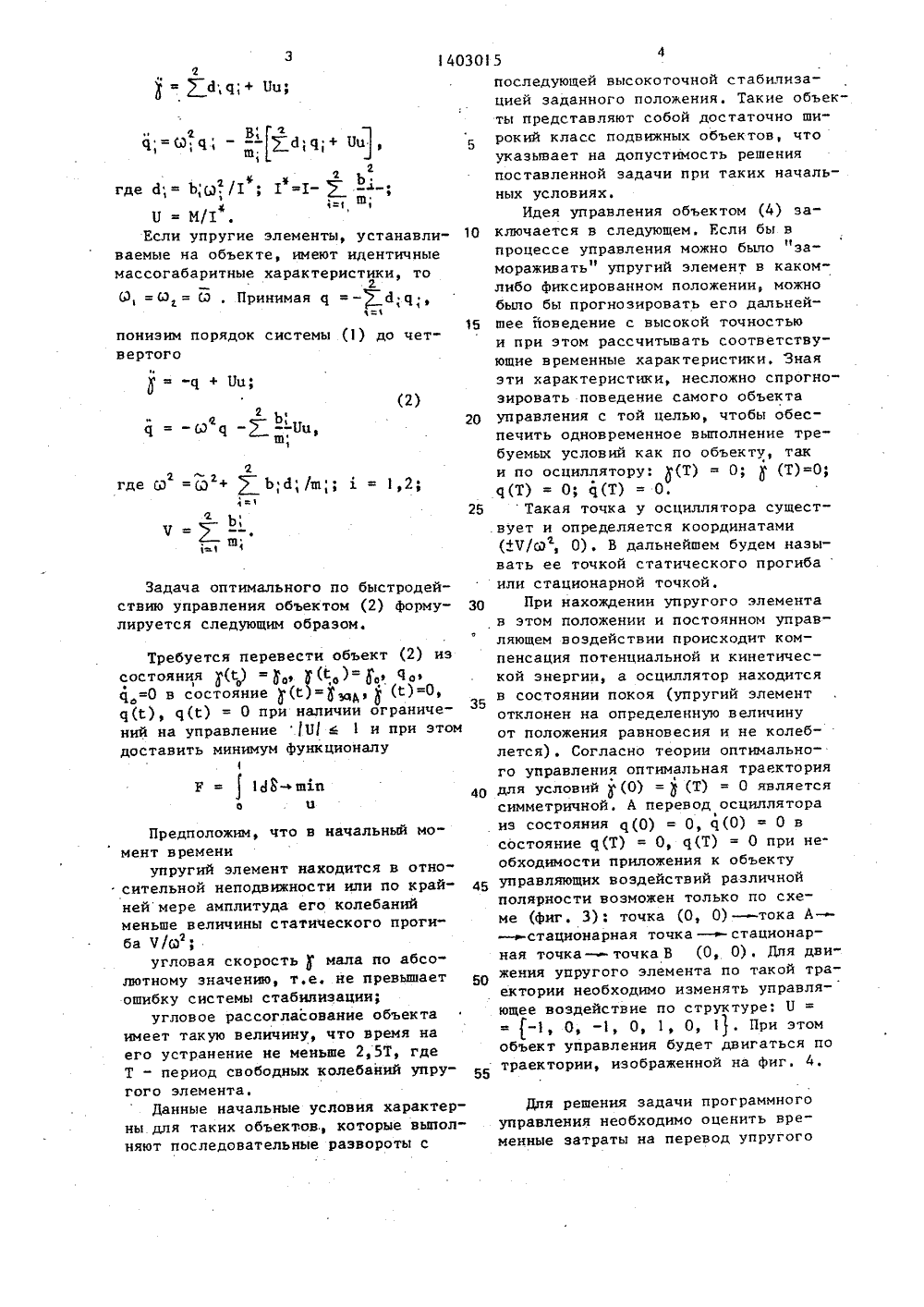
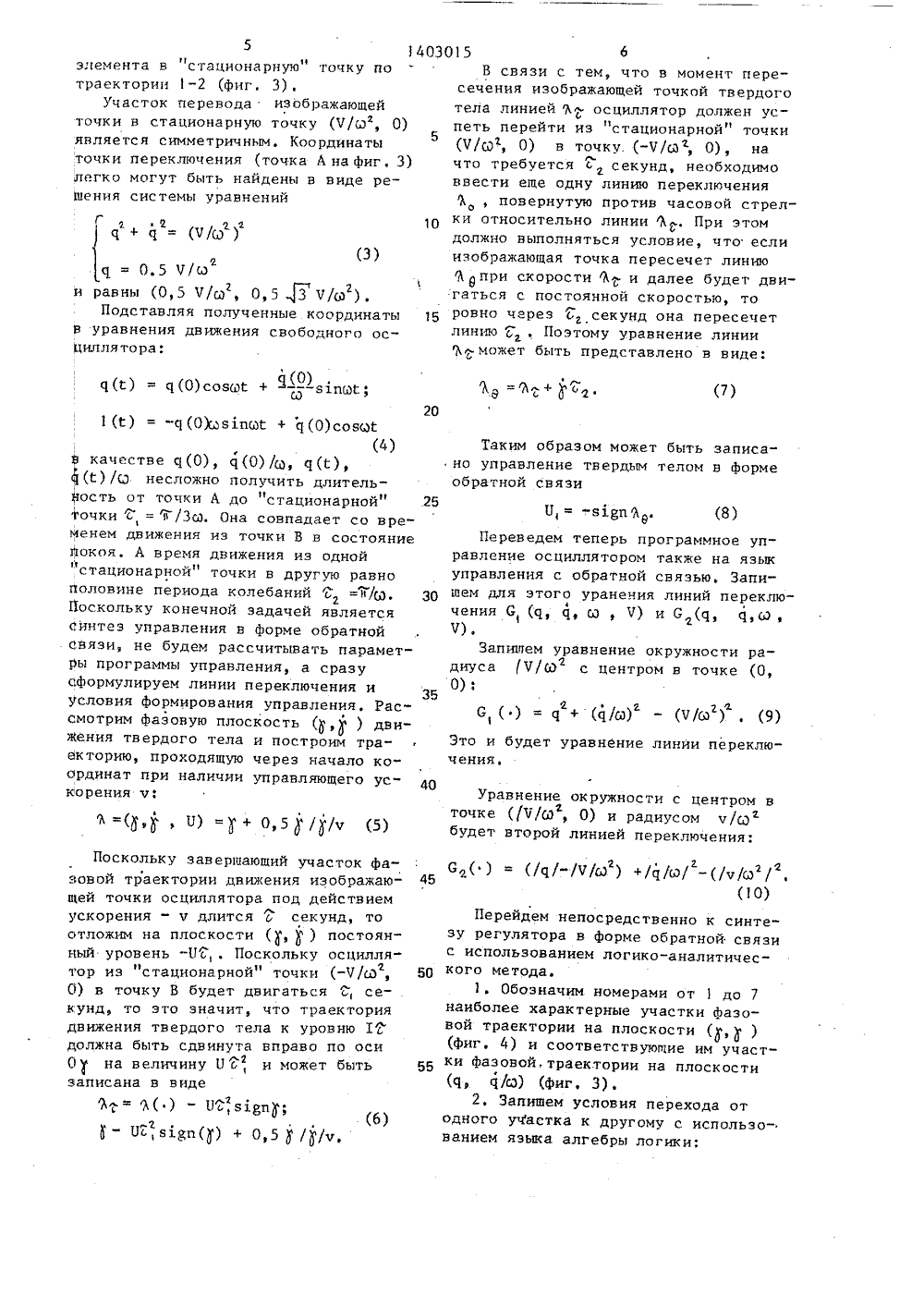
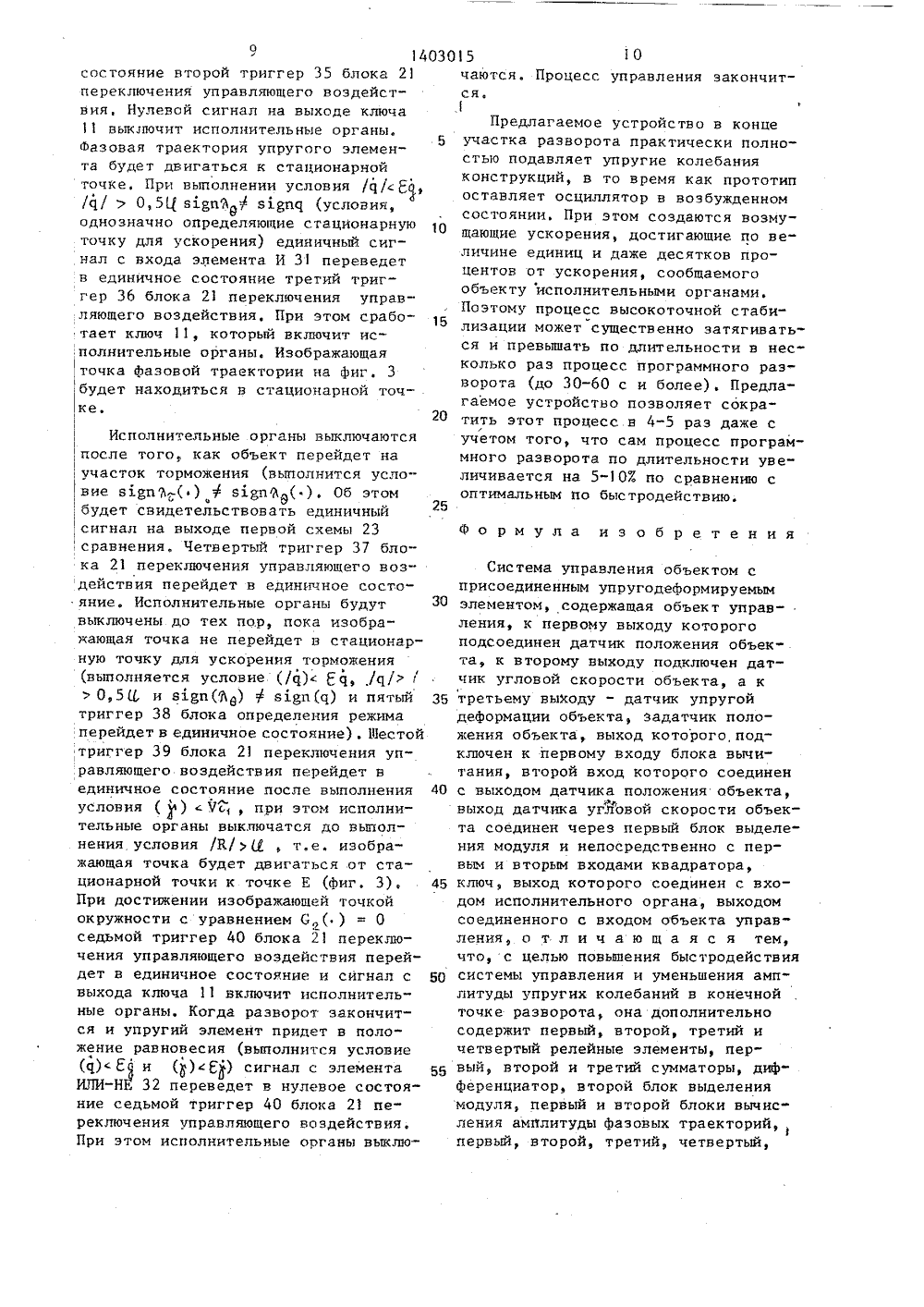
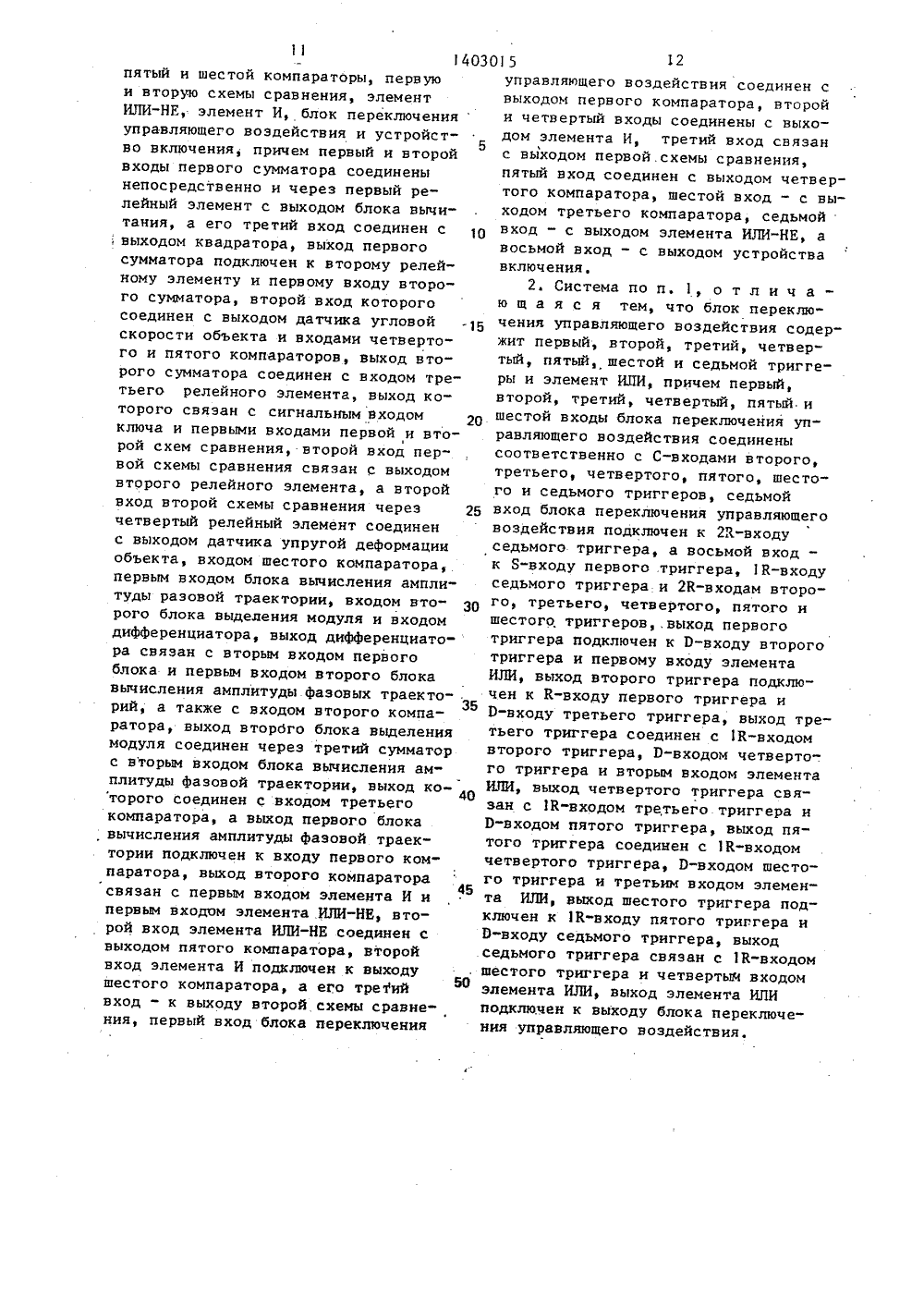
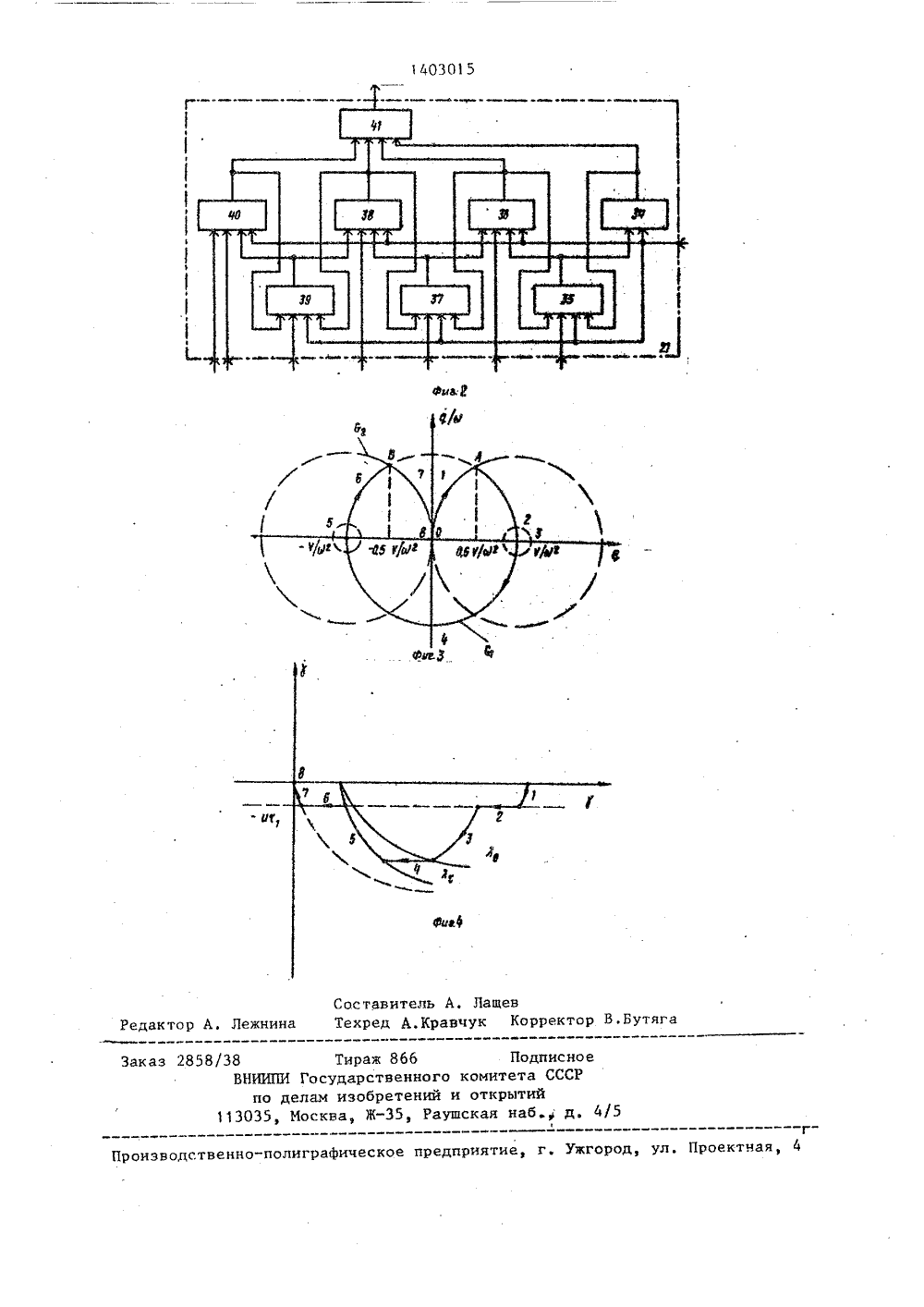
СО 1 ОЭ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 3/00 ТЕТ СССРИ ОТКРЫТИЙ ГОСУДАРСТВЕННЫЙ НПО ДЕЛАМ ИЗОБРЕТЕН ИСАНИЕ ИЗОБРЕТЕНВТОРСНОМУ СВИДЕТЕЛЬСТВУ 4В еревки ельство СССР13/00, 1982ИЯ ОБЪЕКТОМ СДЕФОРМИРУЕИЬМ(57) Изобретение относится к системам управления угловым движениемподвижных объектов. Целью изобретения является повышение быстродействисистемы управления при угловом развороте на заданный угол и уменьшениеамплитуды упругих колебаний в конечной точке разворота. Система управления объектом с присоединенным упругодеформируемым элементом содержит объект 1, исполнительный меха"= -Я ц - - УцЪ,ш1 20 25 Задача оптимального по быстродействию управления объектом (2) форму лируется следующим образом. Для решения задачи программного управления необходимо оценить временные затраты на перевод упругого В,Я,= Ю; %1 - , д, ц;+ Бц 1ггде й;= Ь;у, /1; 1 =1- ,2 ф М ЬП = 11/1.Если упругие элементы, устанавли ваемые на объекте, имеют идентичные массогабаритные характеристики, то2Я, =О = Й . Принимая и = -й;Ч;15 пониэим порядок системы (1) до чет- вертого 2 "22где у =а +Ь;й,/ш,;= 1,2;а=1ш Требуется перевести объект (2) изсостоянияфФ( ) ру Я Офо,=О в состояние =д=0 ц, ц = 0 при наличии ограничений на управление 10 й 1 и при этом доставить минимум функционалу1Р103 мщхпв О Предположим, что в начальный момент времениупругий элемент находится в относительной неподвижности или по Край ней мере амплитуда его колебаний меньше величины статического прогиба Ч/Я 1 Фугловая скоростьмала по абсолютному значению, т.е, не превышает 50 ошибку системы стабилизации;угловое рассогласование объекта имеет такую величину, что время на его устранение не меньше 2,5 Т, где Т - период свободных колебаний упругого элементаДанные начальные условия характерны.для таких объектов которые выполняют последовательные развороты с последующей высокоточной стабилизациеи заданного положения. Такие объекты представляют собой достаточно широкий класс подвижных объектов, чтоуказывает на допустимость решенияпоставленной задачи при таких начальных условиях.Идея управления объектом (4) заключается в следующем. Если бы впроцессе управления можно было "замораживатьупругий элемент в какомлибо фиксированном положении, можнобыло бы прогнозировать его дальнейшее Поведение с высокой точностьюи при этом рассчитывать соответствующие временные характеристики, Знаяэти характеристики, несложно спрогнозировать поведение самого объектауправления с той целью, чтобы обеспечить одновременное выполнение требуемых условий как по объекту, таки по осциллятору: (Т) = 0(Т)=011(Т) = О 4(Т) = О.Такая точка у осциллятора сущест.вует и определяется координатами(7/Я , О), В дальнейшем будем называть ее точкой статического прогибаили стационарной точкой,При нахождении упругого элементав этом положении и постоянном управляющем воздействии происходит компенсация потенциальной и кинетической энергии, а осциллятор находитсяв состоянии покоя (упругий элементотклонен на определенную величинуот положения равновесия и не колеблется). Согласно теории оптимального управления оптимальная траекториядля условий у(0) =(Т) = О являетсясимметричнойА перевод осциллятораиз состояния о(0) = О, ц(0) = 0 всостояние ц(Т) = О, ц(Т) = 0 при не"обходимости приложения к объектууправляющих воздействий различнойполярности возможен только по схеме (фиг, 3): точка (О, 0) в то А-стационарная точка стационарная точка точка В (О, 0) . Для движения упругого элемента по такой траектории необходимо изменять управляющее воздействие по структуре; Б =-1, О, -1, О, 1, О, 1. При этомобъект управления будет двигаться потраектории, изображенной на фиг. 4,403015 6В связи с тем, что в момент пересечения изображающей точкой твердоготела линией Ъосциллятор должен успеть перейти из "стационарной" точки5(Ч/Сдсь 0) в точкУ. (-Ч/Яь 0), наЛчто требуется с секунд, необходимоввести еще одну линию переключенияЪ ь повернутую против часовой стрелки относительно линии % , При этомдолжно выполняться условие, что еслиизображающая точка пересечет линиюЪ упри скорости Фи далее будет двигаться с постоянной скоростью, торовно через с секунд она пересечетлинию Г . Поэтому уравнение линииЪ может быть представлено в виде:(7) 20 Ф качестве с 1(0), с 1(0)/ць с 1(е),Ч(с) /И несложно получить длительность от точки А до "стационарной" 25точки , =/Зю. Она совпадает со временем движения иэ точки В в состояниепокоя. А время движения из одной"стационарной" точки в другую равнополовине периода колебаний ь, =и/И, 30Поскольку конечной задачей являетсяСинтез управления в форме обратнойСвязи, не будем рассчитывать параметры программы управления, а сразусформулируем линии переключения иусловия формирования управления. Рассмотрим фаэовую плоскость ф ь ) движения твердого тела и построим тра"екторию, проходящую через начало ко"ординат при наличии управляющего ус"корения ч; Поскольку завершающий участок фазовой траектории движения изображаю щей точки осциллятора под действием ускорения - ч длится с, секунд, то отложим на плоскости (ь) постоянный уровень -Ю Поскольку осциллятор из "стационарной" точки (-Ч/сд, 50 0) в точку В будет двигаться С, се- . кунд, то это значит, что траектория движения твердого тела к уровню 1 с должна быть сдвинута вправо по оси Оь на величину Бс и может быть 55 записана в виде() - 11,яхпь- Л, яоп + 0,5//ч,5элемента в стационарную точку по траектории -2 (фиг. 3),Участок перевода изображающей точки в стационарную точку (Ч/я, 0) является симметричным. Координаты точки переключения (точка А на фиг, 3) легко могут быть найдены в виде решения системы уравнений с 1 = 0.5 Ч/сь и равны (0,5 Ч/ц, 0,5 Г 3 Ч/а),Подставляя полученные координаты в уравнения движения свободного осциллятора: с 1 = с 1(0)сояуе +в -яапа;сь (О)(е) = -с 1(О)сдядпа + с 1(0)совке(4) Ъ щ(ь ь 11) =)+ 0,5 //ч (5) Таким образом может быть записано управление твердым телом в форме обратной связи 11, = -яхцп% . (8)Переведем теперь программное управление осциллятором также на языкуправления с обратной связью. Запишем для этого уранения линий переключения С (с 1) с 1 ь Сд ь Ч) и ОИь Яьсь ьЧ),Запишем уравнение окружности радиуса /Ч/И с центром в точке (О,О) Ф6, () = с 1 + (с 1/са) - (Ч/Я ), (9) Это и будет уравнение линии переключения,Уравнение окружности с центром в точке (/Ч/я ь 0) и радиусом ч/со будет второй линией переключения: С( ) = (/с 1/"/Ч/а ) +/и/со/ -(/ч/ы/Перейдем непосредственно к синтезу регулятора в форме обратной связис использованием логико-аналитического метода.Обозначим номерами от 1 до 7наиболее характерные участки фазовой траектории на плоскости (уь)(фиг. 4) и соответствующие им участки фаэовой,траектории на плоскости (чь ЧЮ (фиг. 3),2. Запишем условия перехода отодного участка к другому с использованием языка алгебры логики:где т Ч/иЗ " Ч +Рфл -с, воп+ //(2 ч); л+ 6, Я - постоянные, определяющиеточность приведения осциллятора и объекта по скорости;- конечное состояние, определяющее окончание процесса управления,Логические условия(11) содержат повторяющиеся комбинации. Поэтому для однозначного определения текущего номера участка необходимо отсекать все ситуации, которые либо уже пройдены, либо очередь которых еще не наступила. Для этого должен быть введен элемент с памятью, имеющий достаточное число состояний, каждое из которых характеризует принадлежность изображающей точки определенному участку фазовой траектории, Перевод такого элемента в состояние 1+1 должно осущветствующему лтакже если он ествляться по соотгическому условию, ааходится в предыдуИиваботает следующим об ем 1-м состо строиств ра В исходном состоянии объект управления находится в описанном выше состоянии, На первые входы первого и третьего компараторов 25 и 27 подается сигнал, пропорциональный ко" ординате статического прогиба. Яа второй вход шестого компаратора 30 подан сигнал, пропорциональный поло" вине величины стационарного прогиба. На вторые входы второго, четвертого и пятого компараторов 26, 28, 29 подана информация соответственно о точности демпфирования колебаний упругого элемента Е; о величине Ю,и о точности ориентации объекта Е . На второй вход треть о егта нечнет двигатьс вовой плоскости (с упругого элем точке А на56 кЧс выполнится услов первого ком единичноел с выхо переводи сумматора 18 подается информация о величине статического прогиба. Блок 21 переключения управляющего воздействия находится в исходном положении (на всех входах, кроме первого, нулевой сигнал). 20 На входе блоков 4 вычитания, датчик 6 угловой скорости объекта и дат чика 7 упругой деформации объекта присутствуют сигналы, пропорциональные соответственно угловому рассог 25 ласованию, угловой скорости объекта и координате отклонения упругого .элемента, На выходе дифференцирующего элемента 8 появляется сигнал, пропорциональный скорости упругого 30 элемента, На выходе второго блока 20 вычисления амплитуды Фазовой траектории, на входы которого подаются сигналы, пропорциональные /с 1/-Ч/Я появляется сигнал пропорциональный величине В/=Ч /с 1/-Ч(У")+(с 1) Й), а на выходе первого блока 19 вычисления амплитуды, фазовой траектории появляется сигнал пропорциональным К = с+(с 1/а), При помощи первого 40 формирователя 9 модуля сигнала, квадратора 14, третьего линейного элемента 16, первого сумматора 5 вычисляется значение Функции Ъ , знак которой определяет второй релей ный элемент 13. Значение Э формируется на выходе второго сумматора 17, а знак определяется третьим релейным элементом 16, 1Процесс управления начинается с БО определения знака управляющего ускорения в соответствии с формулой Ц9 = "в.дп . Объект начнет разгонят изображающая точка фазовой траект и14030 состояние второй триггер 35 блока 21 переключения управляющего воздействияНулевой сигнал на выходе ключа 11 выключит исполнительные органы.5 Фазовая траектория упругого элемента будет двигаться к стационарной точкеПри выполнении условия /ЧЙ Е Я/ ) 0,5 Ц з 3.рй / зьрк 1 (условия, однозначно определяющие стационарную точку для ускорения) единичный сигнал с входа. элемента И 31 переведет в единичное состояние третий триггер Зб блока 21 переключения управляющего воздействия, При этом сработает ключ 11, который включит исполнительные органы, Изображающая точка фазовой траектории на фиг. 3 будет находиться в стационарной точке, 20Исполнительные органы выключаются госле того как объект перейдет научасток торможения (выполнится усло-вие вьдпЪ(е)з 1 дп 9() . Об этом ; будет свидетельствовать единичный сигнал на выходе первой схемы 23сравнения. Четвертый триггер 37 блока 21 переключения управляющего воздействия перейдет в единичное состояние. Исполнительные органы будут выключены до тех пор, пока изображающая точка не перейдет в стационарную точку дня ускорения торможения (выполняется условие (/Ч)( ЯЧ, /Ч/)) Ор 5 Цг и 81 ЯП(фц) ф 81 ЯП(с) и пятый 35 триггер 38 блока определения режима перейдет в единичное состояние). Шестой триггер 39 блока 21 переключения управляющего воздействия перейдет в единичное состояние после выполнения 40 условия ( у)Ч при этом исполнительные органы выключатся до выполнения условия В/ (Х , т.е. изображающая точка будет двигаться от стационарной точки к точке Е (фиг, 3), 45 При достижении изображающей точкой окружности с уравнением 6 ( ) = 0 седьмой триггер 40 блока 21 переключения управляющего воздействия переидет в единичное состояние и сигнал с 50 выхода ключа 11 включит исполнитель" ные органы. Когда разворот закончит" ся и упругий элемент придет в поло" жение равновесия (выполнится условие (Я)Е ис Г) сигнал с элемента ИЛИ-НЕ 32 переведет в нулевое состояние седьмой триггер 40 блока 21 пе" реключения управляющего воздействия. При этом исполнительные органы вьклю 15 10чаются. Процесс управления закончится аПредлагаемое устройство в конце участка разворота практически полностью подавляет упругие колебания конструкций, в то время как прототип оставляет осциллятор в возбужденном состоянии. При этом создаются возмущающие ускорения, достигающие по величине единиц и даже десятков процентов от ускорения, сообщаемого объекту исполнительными органами.Поэтому процесс высокоточной стабилизации может существенно затягиваться и превышать по длительности в несколько раз процесс программного разворота (до 30-бО с и более). Предлагаемое устройство позволяет сократить этот процесс в 4-5 раз даже с учетом того, что сам процесс программного разворота по длительности уве" личивается на 5"107 по сравнению с оптимальным по быстродействию. Формула изобретения Система управления объектом с присоединенным упругодеформируемым элементом, содержащая объект управления, к первому выходу которого подсоединен датчик положения объекта, к второму выходу подключен датчик угловой скорости объекта, а к третьему выходу - датчик упругой деформации объекта, задатчик положения объекта, выход которого,подключен к первому входу блока вычитания, второй вход которого соединен с выходом датчика положения объекта, выход датчика угловой скорости объекта соединен через первый блок выделе" ния модуля и непосредственно с первьщ и вторым входами квадратора, ключ, выход которого соединен с входом исполнительного органа, выходом соединенного с входом объекта управления, о т л и ч а ю щ а я с я тем, что, с целью повышения быстродействия системы управления и уменьшения амплитуды упругих колебаний в конечной точке разворота, она дополнительно содержит первый, второй, третий и четвертый релейные элементы, первый, второй и третий сумматоры, дифференциатор, второй блок выделения модуля, первый и второй блоки вычис" ления амплитуды фазовых траекторий,первый, второй, третий, четвертый, 111 ч 030 пятый и шестой компараторы, первую и вторую схемы сравнения, элемент ИЛИ-НЕ, элемент И, блок переключенияуправляющего воздействия и устрайст 5 во включения, причем первый и второй входы первого сумматора соединены непосредственно и через первый релейный элемент с выходом блока вычитания, а его третий вход соединен с ; выходом квадратора, выход первого сумматора подключен к второму релейному элементу и первому входу второ" го сумматора, второй вход которого соединен с выходом датчика угловой скорости объекта и входами четвертого и пятого компараторов, выход второго сумматора соединен с входом третьего релейного элемента, выход которого связан с сигнальным входом ключа и первыми входами первой и вто 1 рой схем сравнения, второй вход первой схемы сравнения связан с выходом второго релейного элемента, а второй вход второй схемы сравнения через 25 четвертый релейный элемент соединен с выходом датчика упругой деформации объекта, входом шестого компаратора, первым входом блока вычисления амплитуды разовой траектории, входом вто- Зо рого блока выделения модуля и входом дифференциатора, выход дифференциатора связан с вторым входом первого блока и первым входом второго блока вычисления амплитуды фазовых траекто 35 рий, а также с входом второго компаратора, выход вторбго блока выделения модуля соединен через третий сумматор с вторым входом блока вычисления амплитуды фазовой траектории, выход ко-торого соединен с входом третьего компаратора, а выход первого блока вычисления амплитуды фаэовой траектории подключен к входу первого компаратора, выход второго компаратора45 связан с первым входом элемента И и первым входом элемента ИЛИ-НК, второй вход элемента ИЛИ-НЕ соединен с выходом пятого компаратора, второй вход элемента И подключен к выходу шестого компаратора, а его третий вход - к выходу второй схемы сравнения, первый вход блока переключения 1512управляющего воздействия соединен с выходом первого компаратора, второй и четвертый входы соединены с выходом элемента И, третий вход связан с выходом первой схемы сравнения, пятый вход соединен с выходом четвертого компаратора, шестой вход - с выходом третьего компаратора, седьмой вход - с выходом элемента ИЛИ-НЕ, а восьмой вход - с выходом устройства включения.2. Система по и. 1, о т л и ч а - ю щ а я с я тем, что блок переключения управляющего воздействия содержит первый, второй, третий, четвертью, пятый, шестой и седьмой триггеры и элемент ИЛИ, причем первый, второй, третий, четвертый, пятый. и шестой входы блока переключения управляющего воздействия соединены соответственно с С-входами второго, третьего, четвертого, пятого, шестого и седьмого триггеров, седьмой вход блока переключения управляющего воздействия подключен к 2 Х-входу седьмого триггера, а восьмой вход - к Я-входу первого триггера, 1 В-входу седьмого триггера и 2 К-входам второго, третьего, четвертого, пятого и шестого. триггеров,.выход первого триггера подключен к Э-входу второго триггера и первому входу элемента ИЛИ, выход второго триггера подключен к К-входу первого триггера и 0-входу третьего триггера, выход третьего триггера соединен с К-входам второго триггера, П-входом четверто-. го триггера и вторым входом элемента ИЛИ, выход четвертого триггера связан с 1 к-входом третьего триггера и Р-входом пятого триггера, выход пятого триггера соединен с 1 К-входом четвертого триггера, 0-входом шестого триггера и третьим входом элемента ИЛИ, выход шестого триггера подключен к 1 К-входу пятого триггера и В-входу седьмого триггера, выход седьмого триггера связан с 1 К-входом шестого триггера и четвертый входом элемента ИЛИ, выход элемента ИЛИ подключен к выходу блока переключения управляющего воздействия.1403015 аК оставитель А ехрец А.Крав щев Корректор В.Бутяг ж едак тор аказ 2858/ коми тк ая Проектна Производственно-полиграФическое предприятие, г, Ужгоро Тираж 86 бИИПИ Государственногоо делам изобретений5, Москва, Ж, Рауш Подписноета СССРтийаб. д. 4
СмотретьЗаявка
4077363, 12.06.1986
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИМ. А. Ф. МОЖАЙСКОГО
МАНУЙЛОВ ЮРИЙ СЕРГЕЕВИЧ, ВЕРЕВКИН АЛЕКСАНДР ЮРЬЕВИЧ, ДУБИН ЛЕОНИД АНДРЕЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: объектом, присоединенным, упругодеформируемым, элементом
Опубликовано: 15.06.1988
Код ссылки
<a href="https://patents.su/8-1403015-sistema-upravleniya-obektom-s-prisoedinennym-uprugodeformiruemym-ehlementom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления объектом с присоединенным упругодеформируемым элементом</a>
Устройство для извлечения квадратного корня

Номер патента: 1015378
Опубликовано: 30.04.1983
Автор: Стасюк
МПК: G06F 7/552
Метки: извлечения, квадратного, корня
...последующим информацион" ным входом соответствующей группы входов блока и последующим управляющим входом блока, выход каждого элемен о та И первой группы соединен с первыми входами соответствующих элементов ИЛИ первой и второй групп, второй вход каждого элемента ИЛИ первой группы соединен с выходом последующего эле мента ИЛИ первой и первым входом последующего элемента И второй группы, третий вход первого элемента ИЛИ первой группы соединен с первым управляющим входом блока, второй вход каждого элемента И второй группы соединен с соответствующим информационным входом соответствующей группы, вы. моды первого и второго элементов И второй группы соединены соответствен" на с первым й вторым выходами данного вычислительного узла, вы:оды эле"...
Триггер со счетным входом

Номер патента: 206182
Опубликовано: 01.01.1967
Метки: входом, счетным, триггер
...через усилительный элемент - с каналом сброса памяти.Это позволяет повысить надежность работы триггера.На чертеже представлена схема триггера со счетным входом.Триггер выполнен по двуплечей симметричной схеме и содержит шесть струйных элементов.Два из шести элементов 1 и 2 являются элементами типа память и включены в каждом из плеч триггера. Четыре остальные элемента 3 - 6 - усилители.Усилители 3 и 4 включены по пассивнойсхеме и выполняют роль пассивных распреде лителей струй. Настройка триггера осуцествлястся с помощью настроечных дросселей 7 и 8,П р едмет изобретения10 Триггер со счетным входом, содержащийструйные усилители и два элемента типа память, отличающийся тем, что, с целью повышения надежности, в нем прямой выход...
Пневматический триггер со счетным входом

Номер патента: 211877
Опубликовано: 01.01.1968
МПК: G06D 1/08
Метки: входом, пневматический, счетным, триггер
...элемента Стрелка Пирса и элемента памяти; второй вход элемента, памяти подключен к,пря мому выходу входного усилителя и ко входу второго элемента Стрелка Пирса, второй гход которого соединен с выходом элемента памяти, инверсный выход, первого элемента Стрелка Пирса соединен с входным усили телем, а прямой выход - с,выходным усилителем; выход второго элемента Стрелка Пирса подключен ко входу первого элемента Стрелка Пирса, входным каналом устройства является канал питания входного усили теля; а второй вход элемента ИЛИ служит для установки триггера в исходное положение.Это повышает помехоустойчивость триггера. 25 Входные сигналы подаютсянал 7, а выходными являютсяСигнал установки триггера вжение подается к каналу 10.В таблице показана...
Пневматический триггер со счетным входом

Номер патента: 249756
Опубликовано: 01.01.1969
МПК: F15C 3/14, G05B 6/05, G06D 1/04
Метки: входом, пневматический, счетным, триггер
...устройства и со ьторым входом элемента И, выход которого соединен со вторым входом элемента ИЛИ и с предпочтительным входом триггера с раздельными входами, 25Вьполнение триггера по предложенной схеме позволяет обойтись меньшим числом используемых стандартных элементов.Схема устройства представлена на чертеже, где обозначены соответствующие логические 30 элементы, а схема, образующая дельными входами и содержа Да, ИЛИ, Запрет, обвед Вход триггера через элемент 3 ся предпочтительным. Вых. 1 и ются выходами устройства. Вх входного канала триггера.Устройство работает следую Питание подводится на триг ными входами (1), который в д построен на элементах ИЛИ прет.При входном сигнале, равноь устройства при подаче давлени н а вливаются...
Триггер со счетным входом

Номер патента: 528689
Опубликовано: 15.09.1976
МПК: H03K 3/286
Метки: входом, счетным, триггер
...новочный геры 2 и ментов И 0 Триггер со счетным входом, содержащи установочный триггер. одни из входов которо Изобретение относится к радиотехнике и может быть использовано в различных устройствах автоматики и вычислительной техники.Известен триггер со счетным входом, содержащий установочный триггер, одни из входов которого соединены с соответствующими выходами двух вспомогательных триггеров, каждый из которых состоит из двух элементов И-ИЛИ-НЕ 1.Недостаток известного триггера заключается в сравнительно низкой помехоустойчивости.Цель изобретения - повышение помехоустойчивости триггера со счетным входом.Для этого в триггер со счетным входом дополнительно введены два элемента ИЛИ, первые входы которых соединены со счетным входом...
Предыдущий патент: Система управления технологическим процессом
Следующий патент: Устройство для автоматического управления роботом манипулятором
Случайный патент: Способ сушки текстильных материалов