Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1462242
Авторы: Афонин, Глейзер, Егоров, Назаров, Рассказчиков
Текст
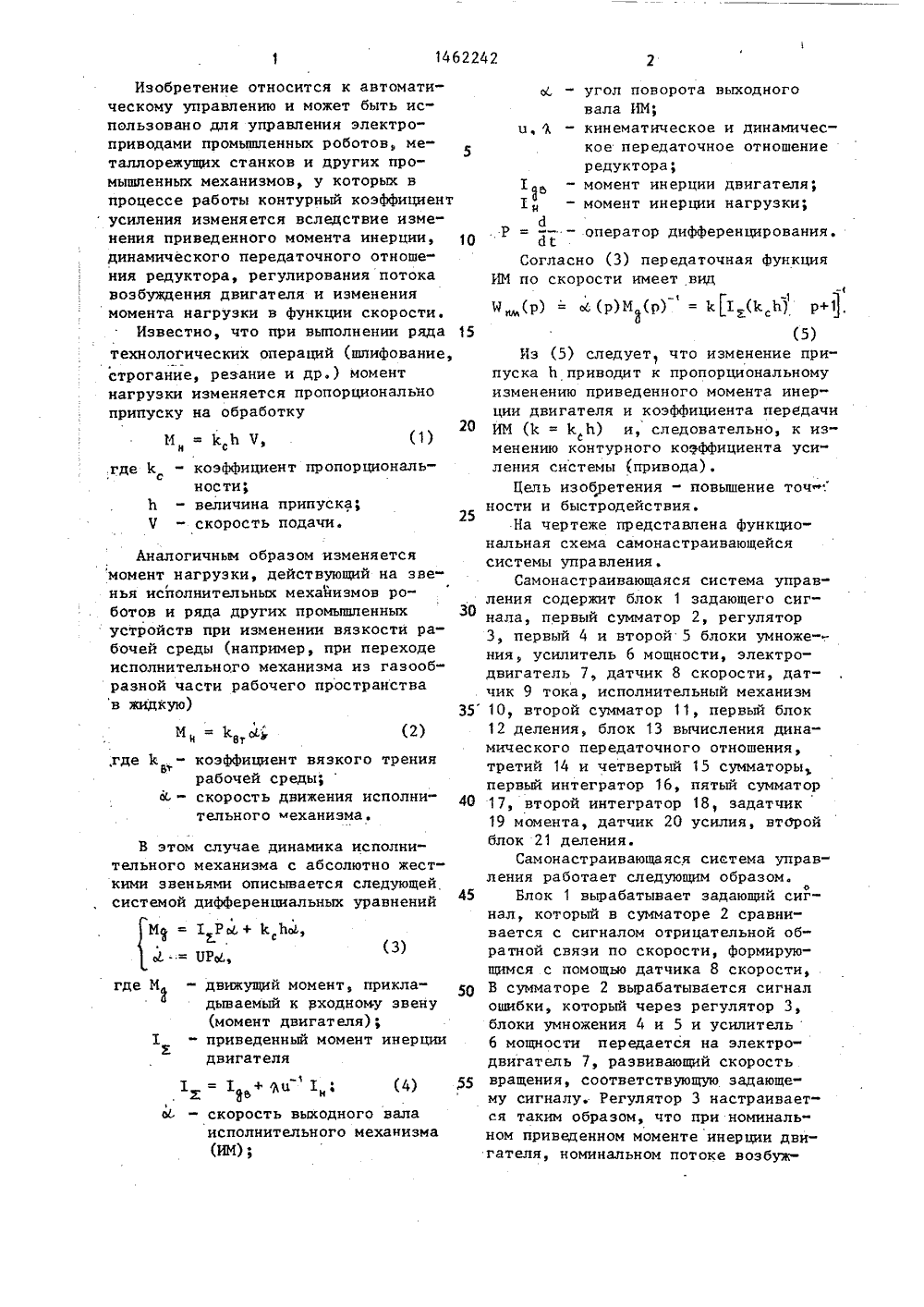
СООЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК 4 19) 5 В 13 ОПИСАНИЕ ИЗОБРЕТЕНИ ВИ ТЕПЬСТВУ ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ПЮТ СССР(56) Авторское свидетельство СССРУ 1277065, кл. С 05 В 13/00, 1986.(54) САМойАСтРАивАКЩАЯСЯ систкмА упРАВЛЕНИЯ(57) Изобретение относится к автоматическому управлению и может бытьиспользовано для управления электроприводами промышленных роботов, металлорежущих станков и других промьппленных механизмов, у которых впроцессе работы контурный коэффициент.усиления изменяется вследствие изменения приведенного момента инерции динамического передаточного отношения редуктора, регулирования потока возбуждения и изменения момента нагрузки в функции скорости. Цель изобретенияповышение точности и быстродействия, Самонастраивающаяся система управления содержит блок 1 задающего сигнала, первый сумматор 2, регулятор 3, первый 4 и второй 5 блоки умножения, усилитель 6 мощности, электродвигатель 7, датчик 8 скорости, датчик 9 тока, исполнительный механизм 10, второй сумматор 11, первый блок 12 деления, блок 13 вычисления дина. мического передаточного отношения, третий 14 и четвертый 15 сумматоры, первый интегратор 16, пятый сумматор 17, второй интегратор 18, задатчик 19 момента датчик 20 усилия и второй Све блок 21 деления. Цель изобретения достигается за счет введения блоков 5 и 21 и датчика 20. 1 ил. 1 ее 44 ьИзобретение относится к автоматическому управлению и может быть использовано для управления электро- приводами промышленных роботов металлорежущих станков и других промышленных механизмов, у которых в процессе работы контурный коэффициент усиления изменяется вследствие изменения приведенного момента инерции, динамического передаточного отношения редуктора, регулирования потока возбуждения двигателя и изменения момента нагрузки в функции скорости.Известно, что при выполнении рядатехнологических операций (шлифование, строгание, резание и др.) момент нагрузки изменяется пропорционально припуску на обработку где Е - коэффициент пропорциональсности Ь - величина припуска; Ч - скорость подачи. Аналогичным образом изменяется момент нагрузки, действующий на звенья исполнительных мехайизмов роботов и ряда других промышленныхустройств при изменении вязкости рабочей среды (например, при переходе исполнительного механизма из газообразной части рабочего пространства в жидкую)Мн = 18 Ыь (2) ,где к - коэффициент вязкого трения Втрабочей среды; Й - скорость движения исполнительного механизма.В этом случае динамика исполнительного механизма с абсолютно жесткими звеньями описывается следующей системой дифференциальных уравнений(3) где М - движущий момент, прикладываемый к входному звену (момент двигателя); 1 - приведенный момент инерции Едвигателя1 = 1 +9 ц 1 (4) 1 - скорость выходного вала исполнительного механизма (ИМ); оС - угол поворота выходноговала ИМ;ц,- кинематическое и динамичес кое передаточное отношениередуктора;1 ь - момент инерции двигателя;1 д - момент инерции нагрузки;Й10й. Р = -- оператор дифференцирования.Согласно (3) передаточная функцияИМ по скорости имеет вид-(и-(р)м (р) - кх,(к ц р+ 15 (5)Из (5) следует, что изменение припуска Ь приводит к пропорциональномуизменению приведенного момента инерции двигателя и коэффициента передачиИМ (1 с = 1 с Ь) и, следовательно, к изменению контурного коэффициента усиления системы (привода).Цель изобретения - повышение точности и быстродействия.На чертеже представлена функциональная схема самонастраивающейсясистемы управления.Самонастраивающаяся система управления содержит блок 1 задающего сигнала, первый сумматор 2, регулятор3, первый 4 и второй 5 блоки умноже.ния, усилитель 6 мощности, электродвигатель 7, датчик 8 скорости, датчик 9 тока, исполнительный механизм 35 10, второй сумматор 11, первый блок12 деления, блок 13 вычисления динамического передаточного отношения,третий 14 и четвертый 15 сумматорыпервый интегратор 16, пятый сумматор 40 17, второй интегратор 18, задатчик19 момента, датчик 20 усилия, второйблок 21 деления.Самонастраивающаяся система управления работает следующим образом.о 45 Блок 1 вырабатывает задающий сигнал, который в сумматоре 2 сравнивается с сигналом отрицательной обратной связи по скорости, формирующимся с помощью датчика 8 скорости,В сумматоре 2 вырабатывается сигналошибки, который через регулятор 3,блоки умножения 4 и 5 и усилитель6 мощности передается на электродвигатель 7, развивающий скорость 55 вращения, соответствующую задающему сигналу. Регулятор 3 настраивается таким образом, что при номинальном приведенном моменте инерции двигателя, номинальном потоке возбуж 1462242дения, номинальном припуске на обработку и тяговом режиме работы сило вого редуктора исполнительного механизма динамические свойства системы (быстродействие и динамические ошибки но управлению и возмущению) удовлетворяют техническим требованиям и считаются оптимальными.Предположим, что момент. нагрузки на выходном валу постоянен, а коэффициент передачи двигателя уменьшается вследствие увеличения момента инерции нагрузки. Будем считать; что силовой редуктор работает в тяговом режиме, В этом случае во,время переходного процесса, например, по управлению (сигнал задания увеличивается) выходной сигнал датчика 9 тока, проходя через блоки 11, 12, 15 "и 16, вызывает изменение сигнала на выходе интегратора 16, который вычитается в сумматоре 17 из сигнала датчика 8 скорости. Разностный сигнал с выхода сумматора 17 поступает на второй вход сумматора 15, где складывается с сигналом, поступающим с блока 12 деления. В результате сигнал на выходе сумматора 15 уменьшается. Вследствие этого увеличивается выходной сигнал блока 12 деления, пропорциональный частному от деления выходного сигнала сумматора 11 на выходной сигнал сумматора 15. Так будет происходить до тех пор, пока сигнал на выходе сумматора 15 не станет равным ускорению выходного вала редуктора, а сигнал на выходе блока.деления 12 - моменту инерции нагрузки, Далее этот сигнал через блок 13 поступает на вход третьего сумматора 14, на второй вход которого подается сигнал пропорциональный моменту инерции двигателя с выхода задатчика 19. На выходе сумматора 14 Формируется сигнал, пропорциональный суммарному моменту инерции, приведенному к валу двигателя. Этот сигнал в блоке 4 умножается на сигнал, поступающий с выхода регулятора 3, В .результате получаем эффект увеличения общего коэффициента передачи регулятора 3 и блока 4 на. величину, пропорциональную уменьшению коэффициента передачи двигателя, и стабилизации контурного коэффициента передачи всей системы в целомАналогичный процесс происходит при уменьшении задающего, сигнала. При изменении момента нагрузки(увеличении) скорость двигателя уменьшается, а ток - возрастает.При этомФпоявляется рассогласование между динамическим током двигателя и сигналомна выходе сумматора 11 (на входе блока 12 деления), поскольку величинасигнала на выходе интегратора 18 со ответствует прежнему (меньшему) значению момента нагрузки. В этом случае сигнал на выходе сумматора 15, аследовательно, и интегратора 16 начинает увеличиваться. Так как выход ной сигнал датчика 8 скорости уменьшается, то под действием появившегосяна выходе сумматора отрицательногорассогласования выходной сигнал интегратора 18 (его знак отрицателен) 20 начинает увеличиваться по абсолютнойвеличине до тех пор, пока не придетв соответствие с увеличившимся моментом нагрузки.При одновременном. изменении момен та нагрузки и момента инерциисогласованная работа и правильное взаимодействие контуров оценки момента инерции (блоки 11. 1415-17 и 19) и тока нагрузки (блоки 30 11, 12, 15-18) обеспечиваются соответствующим выбором их контурных коэфФициентов усиленИя.В статическом равновесном состоянии (ы, =Ы = О, ММ) силовой необ ратимый р едукт ор ис полнит ел ьн ог о механизма заклинивается. Это позволяетотключать исполнительный электрический двигатель от источника энергиив статических равновесных состояниях 40 и за счет этого существенно повыситьэнергетические характеристики системыв целом.При изменении динамического передаточного отношения редуктора вслед ствие смены режима его движения, чточаще всего происходит при реверсе,торможении или разгоне электрическогодвигателя, изменяется знак одной изпеременных системы: скорости (о) или 50 токадвигателя, При этом в блоке13 изменяется знак сигнала, пропорционального произведению моментаи скорости двигателя, Формируемогопо сигналам, поступающим на первый и 55 второй управляющие входы блока с выходов датчиков тока 9 и скорости 8.В результате в блоке 13 в функциизнака вновь сформированного сигналаустанавливается коэффициент передачи1462242 Самонастраивающаяся система управления, содержащая последователБно соединенные блок задающего сигнала, первый сумматор, регулятор,первый блок умножения, последователь"но соединенные усилитель мощности иэлектродвигатель, подключенный выходом к входу исполнительного механизма, а также через датчик скорости квторому входу первого сумматора ипервому управляющему входу блока вычисления динамического передаточногоотношения и через датчик тока к входувторого сумматора и второму управляющему входу блока вычисления динамического передаточного отношения,выход которого соединен с входом третьего сумматора,. подключенного вторым входом к выходу задатчика момента, а выходом - к второму входу первого блока умножения, выход второгосумматора соединен с входом делимогопервого блока деления подключенноговыходом к информационному входу блока вычисления динамического передаточного отношения и через последовательно соединенные четвертый сумматор, первый интегратор, пятый сумматор, второй интегратор - к второмувходу второго сумматора, выход первого интегратора соединен с входомделителя первого блока деления, второй вход и выход пятого сумматораподключены соответственно к выходудатчика скорости и к второму входучетвертого сумматора, о т л и ч а -ю щ а я с я тем что, с целью повышения точности и быстродействиясистемы, введены датчик усилия, второй блок деления и второй блок умножения, соединенный входом с выходомпервого блока умножения, а выходом -с входом усилителя мощности, выходисполнительного механизма через датчик усилия подключен к входу делимсговторого блока деления, соединенноговходом делителя с выходом датчикаскорости, а выходом - с вторым входомвторого блока умножения,по информационному входу, пропорциональный динамическому передаточному отношению силового редуктора системы в соответствующем режиме движения, что позволяет учесть нелинейные свойства редуктора при оценке суммарного приведенного момента инерции, а следовательно, повысить точность работы устройства идентификации и всей сис темы в целом.Как видно из (5), изменение вели.чины припуска эквивалентно изменению коэффициента усиления и момента инер:ции исполнительного механизма. Вли яниепеременного момента инерции на динамику системы компенсируется описанным выше контуром самонастройки с наблюдателем момента инерции наг:рузки. Влияние изменения припуска на 2 п коэффипиент усиления исполнительного механизма устраняется следующим образом.Рассмотрим случай, когда припуск :на обработку Ь, например, увеличи ;вается. В этом случае сигнал на вы,ходе датчика 20 усилия также увеличивается, а сигнал на выходе датчика 8 скорости вследствие наличия люфтов, упругих деформаций некоторое 30 время остается неизменньм. В результате увеличивается сигнал на выходе блока 21 деления в соответствии с изменив 1 пимися сигналами на его входах, поступающими с выходов датчика скорости 8 и усилия 20, Выходной сигнал блока 21 деления умножается в блоке 5 на выходной сигнал блока 4 умножения. В результате будет наблюдаться эффект увеличения общего коэффициен та усиления регулятора 3, блока 4 и 5 умножения на величину, пропорциональную изменению усилия резания, и в соответствии с (1) стабилизации контурного коэффициента передачи всей 45 системы в делом в условиях изменения припуска на обработку детали.Аналогичный процесс происходит при уменьшении припуска Ь.50Таким образом, применение изобретея ния позволяет учесть влияние на ве пичину общего коэффициента усиления системы изменения п 1 ипуска на обработку, что позволяет повысить точность и быстродействие работы системы в целом. формула изобретения
СмотретьЗаявка
4313650, 06.10.1987
ВЛАДИМИРСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ, НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ТЕХНОЛОГИИ АВТОМОБИЛЬНОЙ ПРОМЫШЛЕННОСТИ
АФОНИН ВЯЧЕСЛАВ ЛЕОНИДОВИЧ, ГЛЕЙЗЕР ЛЕОНИД ЯКОВЛЕВИЧ, ЕГОРОВ ИГОРЬ НИКОЛАЕВИЧ, НАЗАРОВ АЛЕКСЕЙ АЛЕКСАНДРОВИЧ, РАССКАЗЧИКОВ НИКОЛАЙ ГЕННАДЬЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: самонастраивающаяся
Опубликовано: 28.02.1989
Код ссылки
<a href="https://patents.su/4-1462242-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для измерения крутящего момента на роторе буровой установки

Номер патента: 1516808
Опубликовано: 23.10.1989
Авторы: Загоруйко, Карпенко, Кузько, Ласкавый, Непочатов, Фетисенко, Яценко
МПК: G01L 3/10
Метки: буровой, крутящего, момента, роторе, установки
...информационные входы запоминающих элементов 14 и 15 с блока 5 поступает сигнал момента холостого хоЛа в начале (щ+1)-го интервала Мщ. На выходе элемента И 11 и 12 и Формирователей 29 и 30 дежурит логический ноль.Триггер 28 находится в состоянии логической единицы на прямом выходе.Бурильщик нажимает и отпуСкает кнопку 31, По опусканию кнопки 31 на коротное время появляется импульс логической единицы на выходе формирователя 29, по спаду этого импульса возникает такой же импульс на выходе формирователя 30, Положительный Фронт импульса с формирователя 29 перебрасывает триггер 28На его прямом выходе устанавливается логический ноль, а на инверсном - логическая единица. На управляющие входы запоминающих элементов 15 и 17 поступают с выхода...
Блок формирования переноса сумматора

Номер патента: 1718214
Опубликовано: 07.03.1992
Автор: Павлова
МПК: G06F 7/50
Метки: блок, переноса, сумматора, формирования
...2 разряда 11 пропускает уровень сигнала логической единицы на выход 16 переноса разряда 11(С 1), а также на исток р-канально1718214 35 10 20 го транзистора 2 разряда 12, который закрыт уровнем сигнала логической единицы, поступающего на его затвор с выхода элемента ИЛИ - НЕ 19 разряда 12, на соответствующие входы которого поступают уровни сигналов логического нуля, уровень сигнала логической единицы на сток транзистора 2 разряда 1 г и на выход 17 переноса разряда 12 (Сг) не передается. Транзистор 2 разряда 1 э открыт уровнем сигнала логической единицы, поступающего с выхода элемента ИЛИ - НЕ 19 разряда 1 э, на входы которого поступают уровни сигналов логического нуля и логической единицы, открытый транзистор 2 разряда 1 э передает...
Устройство для передачи по радио и регистрации сигнала в моменте взрыва

Номер патента: 117805
Опубликовано: 01.01.1958
Автор: Хоменюк
МПК: G01V 1/26
Метки: взрыва, моменте, передачи, радио, регистрации, сигнала
...генератором 2 синусоидальных колебаний, который модулирует частоту радиопередатчика. Генератор 2 управляется тиратронным ключом 3, который отпирается в момент взрыва путем подачи на управляющую сетку тиратрона импульса напряжения, возникающего при разрыве цепи электродетонатора.С отпиранием тиратронного ключа 3 прекращается работа генератора 2 и модуляция несущей частоты радиопередатчика 1, что дает возможность осуществить передачу момента взрыва, Прием отметки о моменте взрыва осуществляется радиоприемником 4, на вход которого включается двухсторонний амплитудный ограничитель 5, ограничивающий импульсные помехи на уровне полезного сигнала. За ограничите117805 лем следует узкополосный резонансный усилитель б, настроенный на...
Двухкоординатная система программного управления

Номер патента: 938264
Опубликовано: 23.06.1982
Авторы: Горбунов, Коротков, Рудаков, Тарасенко
МПК: G05B 19/18
Метки: двухкоординатная, программного
...в блок 5проверки ограничений и блок 6 контроля скорости. В блоке 5 проверки ограничений оцениваются значения второй и третьей производной по времениведомой координаты. Информация о производных при превышении ими установленных норм поступает в блок 4 коррекции, в котором с учетом информациио движении по ведущей координате, поступающей из арифметического устройства 3, вырабатывается требуемое значение скорости по ведущей координате,при которой не происходит нарушениеограничения.В арифметичегком устройстве 3 вычисляется скорректированное движениепо ведущей координате на участке отначального значения координаты, поступающего из блока 14 памяти черезкоммутируемый элемент 8, открытыйсигналом с выхода триггера 7, до координаты, при которой...
Устройство для управления загрузкой, выгрузкой и перемещением заготовок в нагревательной печи

Номер патента: 1307196
Опубликовано: 30.04.1987
Автор: Орещенко
МПК: F27B 9/40
Метки: выгрузкой, заготовок, загрузкой, нагревательной, перемещением, печи
...балок(выполняется десятое условие). Крометого устройство для управления формирует мигающий сигнал , , если заготовка отсутствует на позиции загрузки заданное время (выполняетсявторое условие) или время нахождениязаготовки на позиции загрузки по причине отсутствия операции разгрузкипревышает заданный интервал (выполняется восьмое условие(.При неисправности элемента 1 НЕ идатчиков 2-4 необходимо разомкнутьсоответственно шестой, седьмой, первый и третий ключи в блоке 74 ИЛИ(фиг. 5). Устройство может продолжатьработу в автоматическом режиме принеисправных датчиках 2 и 3, если перевести из первого во второе положениесоответственно ключи 98 и 99 (фиг.б),При неисправных элементе 1 НЕ и датчике 4 работу последних необходимоимитировать вручную...
Предыдущий патент: Пневматическое устройство управления
Следующий патент: Самонастраивающаяся система регулирования скорости
Случайный патент: Устройство контроля неисправности торговых автоматов