Бинарная система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
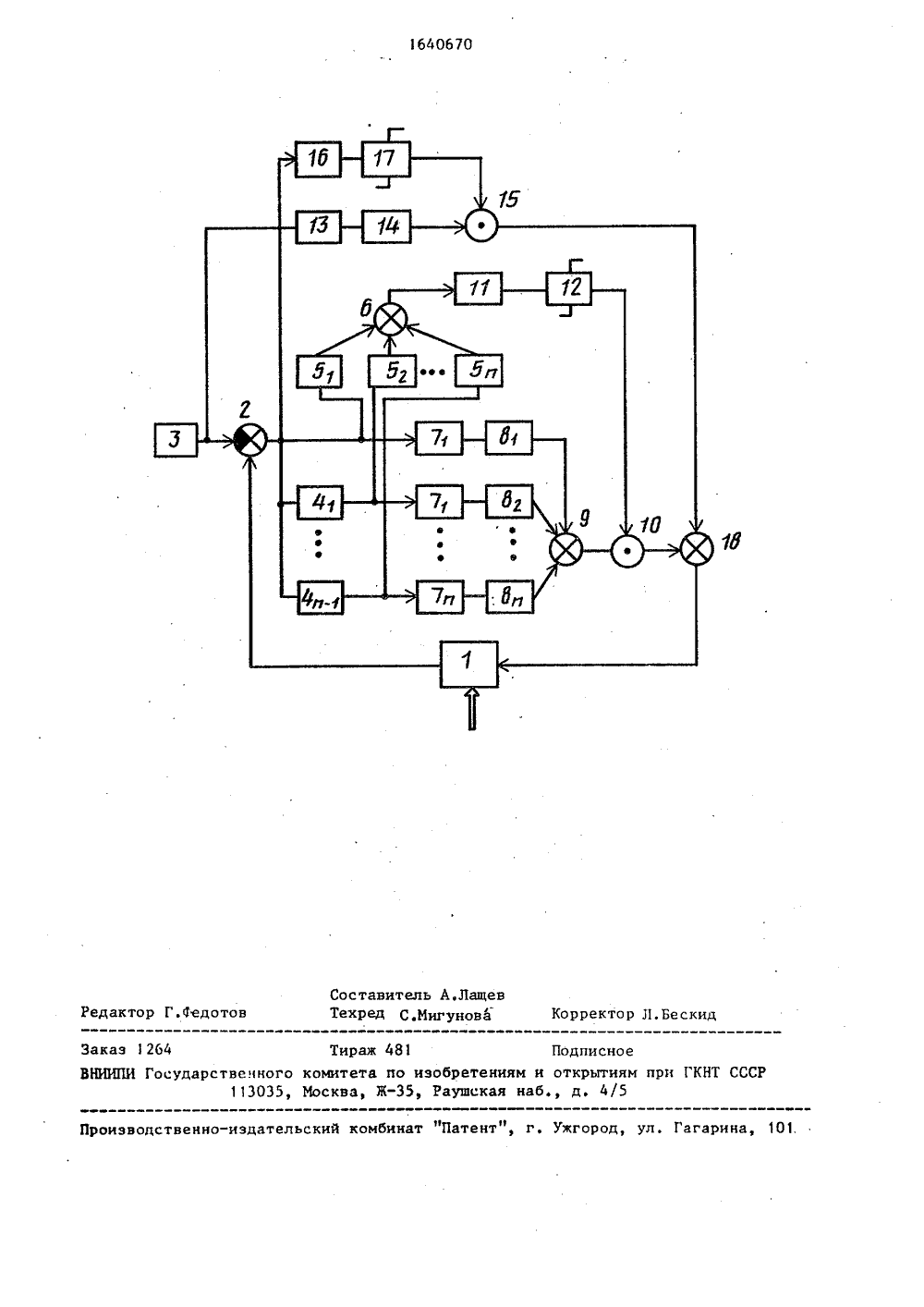
СОЮЗ СОВЕтСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИН 1) 605 В 13 ГОСУДАРСТВЕННЫЙПО ИЗОБРЕТЕНИЯМ ИПРИ ПЯТ СССР МИТЕТ ОТНРЫТИЯП ЕТЕНИ НИЕ ЬСТВ У СВИДЕ;Т АВТОР 6/283 торого и скорос нения проестных ограема соцериз контура, динамичесиэм няются в из звол У 13(038.3) нах, Систостоящийтребуемыеки процесотрабатыв ниченных диапаэжит регулятор,обеспечивающегокие характерист ьянов,,Г,Иамедов са упра во СССР02, 1984. ющего за Для комп ния, и контура, данное значение сации статизма и ния, обусловленн параметров объек ельс кое свид кл. СО 13/ атизм ого н та, в сится к автомаи регулированию арными объектаение от равлению ительно вв ен ор улят но-о тчик нои связи с контур коорд ной связи с свойств. 1 ип нестацион значено дл начением с ем объекта я управления с татизма свободпараметры ко а (С)а+где а а и тные минимальн соотвеия 1.-г аксимально енно, знач параметра;известные огр+ а ,а1ичения ния ь+ а,(С)у(С) = П сти измен ск па мет я каждого ик гд ванног в отра(С)(54) БИНАР (57) Иэобр тическому существенн ми и предн требуемым ным движен Изобретение относится к автоматическому управлению.и регулированиюсущественно нестационарными объектами, параметры которых и скорость ихизменения произвольно изменяются визвестных ограниченчых диапазонах.Предполагается, что динамическийобъект управления моделируется нестционарным диФФеренциальным уравнением и-го порядкаЮ (в.Р . у (С) + а(С)у (С) С - текущее врем момент времени, у(С(наблюдаемый) выход 801640 а регулировастационарностью регулятор дополй контур обратом и второй раторной обрат- динамических правляющее воздействие, а; (С) /.1,2,и - переменные параметр бъекта, удовлетворяющие условиям Задача управления состо ботке задающего воздействи управляемым выходом объект заданным значением статизм/х (Й)/( с Д1где х(С) = у(г) - У (1) - ошибка ре 5гулировйния;Б : у (й) в известн задаютщее воздействиена объект;- длительность пе 1 а Ореходного процесса;ЛО - любая сколь угодно малая величинаиз любого началь- .15 ного состояния системы и при ограниченной величине и скорости изменения параметров объекта в указанных диапазонах (2), при конечных коэффициентах усиления в классе непрерывнык законов управления.Цель изобретения - повышение точности системы при неизвестном характере изменения параметров объекта.На чертеже представлена схема бинарной системы управления.На схеме изображены последовательно соединенные объект 1 управлеЭния выходом которого является регулируемая координата у(С), а входом - управляющее воздействие П(С) и блок 2 сравнения, формирующий сигнал ошибки х . Второй вход последнего соединен с выходом задатчика З,вырабатывающего задание у(й), а выход - с входами дифференциаторов 4, форми 35 рующих производные х(С)х(й) от сигнала ошибки х (й) (координаты ошибки регулирования).Выходы дифференциаторов 4 и блока 40 2 сравнения соединены через соответствующие первые усилители 5 с входами первого сумматора 6, выходом которого является ошибка (7(1) первого контура координатно-операторной об 45 ратной связи (КООС), а через соответствующие модульные элементы 7 первого контура координатной обратной связи (КОС) - с входами вторых усилителей 3Выходы последних подключены к соответствующим входам второго сум 50 матора 9, выход которого подключен к входу первого умножителя 10. Выход сумматора б соединен с входом релейного элемента 1, последовательно соединенного с интегратором 12, имеющим, ограничения по выходу. Выход интегратора 12 соединен с вторым входом умножителя 10. Вход второго модуль 04ного элемента 13, формирующего модуль от сигнала задания у(й),подключен к выходу задатчика 3, а выход через третий усилитель 14 соединенс первым входом второго умножителя 15, Его второй вход соединен через последовательно соединенные второй релейный элемент 16, входом которого является сигнал ошибки х(С) с блока 2 сравнения, и второй интегратор 17 с ограничениями по выходу, выходом которого является сигнал-оператор(С). Умножитель 15, выходом которого является сигнал управления П(С) контура координатной обратнойсвязи, подключен к входу сумматора 18, к второму входу которого подключен умножитель 1 О, выходом которого является сигнал управления Б(С) другого контура координатной обратной связи. Сигнал управления П(й) с выхода сумматора 18 подается на входобъекта 1 управления,Система работает следующим образом.Контур, обеспечивающий устойчивость положения равновесия объекта управления, работает следующим образом.Выходной сигнал у(й) объекта 1 .управления сравнивается с сигналом у (С) задатчика 3 в блоке 2 сравнения. Полученный сигнал поступает на вход модульного элемента 7, а на входы остальных модульных элементов 7 7 п - через соответствующие дифференциаторы 44 , с целью получения необходимой для управления информации о состоянии объекта. Сигналы с модульных элементов через соответствующие первые усилители 3 8 1,подаются на сумматор 9, с выхода которого сигнал подается на первый вход умножителя 10, выходной сигнал которого П(г.) подается на первый вход сумматора 18, с выхода которого сигнал П(й) подается на объект 1 управления.Наличие интегрирующего блока 12 позволяет получить непрерывный сигнал П(С) еВторой контур, обеспечивающий заданное значение. величины установившейся ошибки процесса регулирования, функционирует следующим образом,Пропорционально модулю величины задающего воздействия уз блоками 13 и 14 второго контура КОС формиру 5 164 ется дополнительная компонента управления, компенсирующая статическую ошибку управляемого процесса, В зависимости от соотношения ошибок регулирования х;(й) блоками 16 и 17 второго контура КООС формируется операторная переменная(С), автоматически изменяющая параметры КОС.Иными словами, контур, формирующий компоненту управления Д 01,(С), обеспечивает инвариантность системы к возмущению, обусловленному наличием задатчика 3.Интегратор 17 сглаживает сигнал управления ПД(1) .Совокупность "динамической" П и "статической" П (й) компонент упЬравления, подаваемых на сумматор 18, с выхода которого управляющий сигнал 0(й) подается на вход объекта 1 управления, обеспечивает решение поставленной задачи управления.Результаты имитации бинарной системы управления, содержащей нестационарный объект 4-го порядка,показывает принципиальную невозможность решения прототипом сформулированной задачи управления.Предлагаемая бинарная система управления обеспечивает решение поставленной задачи слежения и заданное качество процессов для рассматриваемого класса объектов.Формула изобретения Бинарная система управления,содержащая последовательно соединен Об 70 бные объект управления и блок сравне-.ния, суммирующий вход которого соедйнен с выходом задатчика, а выход -с входами дифференциаторов, выходыкоторых и выход блока сравнения соединены через соответствующие усилители первой группы с входами первого сумматора, а через соответствующие модульные элементы - с входамиусилителей второй группы, вы; )ды которых подключены к соответствующим входам второго сумматора, выход которого подключен к первому входу первогоумножителя, выход первого сумматорасоединен через последовательно включенные первый релейный элемент первый интегратор с ограничением с вторым входом первого умножителя, о тд л и ч а ю щ а я с я тем, что, сцелью повышения точности системы принеизвестном характере изменения параметров объекта, в нее введены вто-.рой релейный элементтретий сумма тор, усилитель, второй интеграторс ограничением и второй модульныйэлемент, вход которого подключен квыходу задатчика, а выход через усилитель соединен с первым входом второго умножителя, ко второму входукоторого подключен через последовательно соединенные второй релейныйэлемент и второй интегратор с ограничением выход блока сравнения,выходы первого и второго умножителей подЗ 5 ключены к соответствукщим входамтретьего сумматора, выход которогоподключен к входу объекта управления1640670 Составитель А.ЛещевТехред С.Мигунова Редактор Г.Федотов Корректор Л.Бескид Заказ 1264 Тираж 481 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул. Гагарина, 101.
СмотретьЗаявка
4488106, 02.09.1988
ПРЕДПРИЯТИЕ ПЯ М-5904, ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ СИСТЕМНЫХ ИССЛЕДОВАНИЙ АН СССР
АВРУЦКИЙ ГАРРИ ИЗРАИЛЕВИЧ, ЕМЕЛЬЯНОВ СТАНИСЛАВ ВАСИЛЬЕВИЧ, ИВАНОВ ВЛАДИМИР ПЕТРОВИЧ, КОРОВИН СЕРГЕЙ КОНСТАНТИНОВИЧ, МАМЕДОВ ИГОРЬ ГУЛИЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: бинарная
Опубликовано: 07.04.1991
Код ссылки
<a href="https://patents.su/4-1640670-binarnaya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Бинарная система управления</a>
Способ сравнения двух hanpfl. imh, при воздействии notffix на одно из сравнива-

Номер патента: 433412
Опубликовано: 25.06.1974
Авторы: Бахмутский, Кирин, Львовский, Ндеш, Пензенский, Шептебань, Электроизмерительных
МПК: G01R 17/00
Метки: hanpfl, notffix, воздействии, двух, одно, сравнения, сравнива
...выделенный сигнал помехи суммируют со вторым из названных напряжений и сравнивают сумму этих напряже-ний с пеовым напояжением. Таким образом, по предлагамому способу сравнения конечныйэтап компенсации помехи происходитв узле сравнения. Такая последова тельность операциИ позволяет устранить инвертирование сигнала чтоупрощает реализацию способа . Крометого, отсутствует операция фильтраций помехи, что позволяет повы сить в следящем режиме) динамическую точность устройств, реализующих этот способ.На чертеже представлена блоксхема устройства, реализующего 15 предлагаемый способ.Устройство состоит из узла 1сравнения, узла 2 выделения сигнала помехи, сумматора 3, генератора Ф развертывающего сйгнала.20 Устройство работает...
Система управления объектом с несколькими управляющими входами

Номер патента: 1287105
Опубликовано: 30.01.1987
Авторы: Авдеев, Киселев, Мышляев, Попов, Соловьев
МПК: G05B 13/04
Метки: входами, несколькими, объектом, управляющими
...с выхода первого источника 15 постоянного сигнала. Полученный сигнал о величине И(С) контролируемого возмущения с выхода первого элемента 16 сравнения подается на первый вход блока 18 умножения, где умножается на коэффициент К (С), сигнал о котором поступает на второй вход этого блока умножения с выхода блока 17 адаптации. В результате на выходе блока 18 умножения формируется сигнал о величине ьц (С) изменения интегрального значения общего управляющего воздействия, необходимого для компенсации тт(С)дЦ (С) : К (с)ьт(с)., (6) выходов соответственно четвертого 40и первого 16 элементов сравнения, поформуле 11 дц В.-К,ОУ,ф1 У 1 дВ 7 -Я у+ 1 т(е-.) 40 45 50 55 7 1 3-й порции материала в объекте управления,Сигнал у(С) об усредненном...
Устройство для синхронного управления двумя объектами

Номер патента: 473989
Опубликовано: 15.06.1975
Автор: Новоселов
МПК: G05B 13/02
Метки: двумя, объектами, синхронного
...этого сигнала, Ошибка первого привода, выделяемая в чувствительном элементе 3, возбуждает силовой блок 10 привода 1. Нагрузка привода 1, включенная в состав блока 10, перемещается по определенному закону и в определенное положение. Ошибка привода 1 в установившемся режиме компенсируется сигналом с блока 8. При невыполнении в установившемся режиме условия инвариантцости ошибки привода 1 блок самонастройки 9 вырабатывает сигнал, корректирующий сигнал компенсации 5 10 15 20 25 30 35 40 45 50 55 60 65 до обеспечения минимума установившейся ошибки.При достижении ошибкой определенной величины при отработке программного сигнала ключ 4 размыкается, а ключ 6 замыкается. Первый привод переходит в режим подслеживация по сигналу с блока 7...
Способ экстремального управления объектами с линейным динамическим звеном второго порядка и нелинейным статическим звеном

Номер патента: 640256
Опубликовано: 30.12.1978
МПК: G05B 13/02
Метки: второго, динамическим, звеном, линейным, нелинейным, объектами, порядка, статическим, экстремального
...устойчивым (а 0, 60),так и неустойчивым (один из коэффициентов а, 6 или оба одновременно меньше нуля). Причем выход Х линейного звена ненаблюдаем.Процесс поиска минимума Я поясняетсядля нейтрального объекта (а=о=О), Поисковые шаги по Х образуются за счет 10изменения знака обратной связи с задержкой на постоянный интервал времени по отношеншо к моментам изменения знака первой производной Я от выходной величиныобъекта Я, а не по отношению к моментампзмснения знака Х, Для гходимости нроцесса поиска к экстремуму Я необходимознак обратной связи изменять с запаздыванием по отношению к моментам изменения знака Х. Для обеспечения этого условия выходной сигнал об ьекта умножают назнак произведения входного сигнала ф=-Хи второй производной Я от...
Поисковый регулятор для резонансной настройки контура нулевой последовательности сети

Номер патента: 1080231
Опубликовано: 15.03.1984
Авторы: Иванилов, Обабков, Сапилов, Сергин, Целуевский
МПК: H02H 9/08
Метки: контура, настройки, нулевой, поисковый, последовательности, регулятор, резонансной, сети
...подключен к первым входам первого и второго множительных звеньев, первый и второй релейные усилители, выходы которых соединены со вторыми входами первого и второго множительных звеньев соответственно, первый и второй Фильтры низкой частоты, входы которых подключены соответственно к выходам первого и второго множительных звеньев, последовательно соединенные сумматор и астатический исполнительный орган компенсирующего реактора 3 .Данное устройство обеспечивает существенное повышение быстродействия и помехоустойчивости системы. Однако затруднено обеспечение требуемой точности выбором фазы опорного сигнала в условиях широкого диапазона изменения параметров сети и повышенных частот поиска.Кроме того, Форма статической управляющей...
Предыдущий патент: Корректирующее устройство
Следующий патент: Многомерная система координатно-параметрической стабилизации
Случайный патент: Сортировка для коробочек хлопка