Система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1792539
Автор: Лащев

Текст
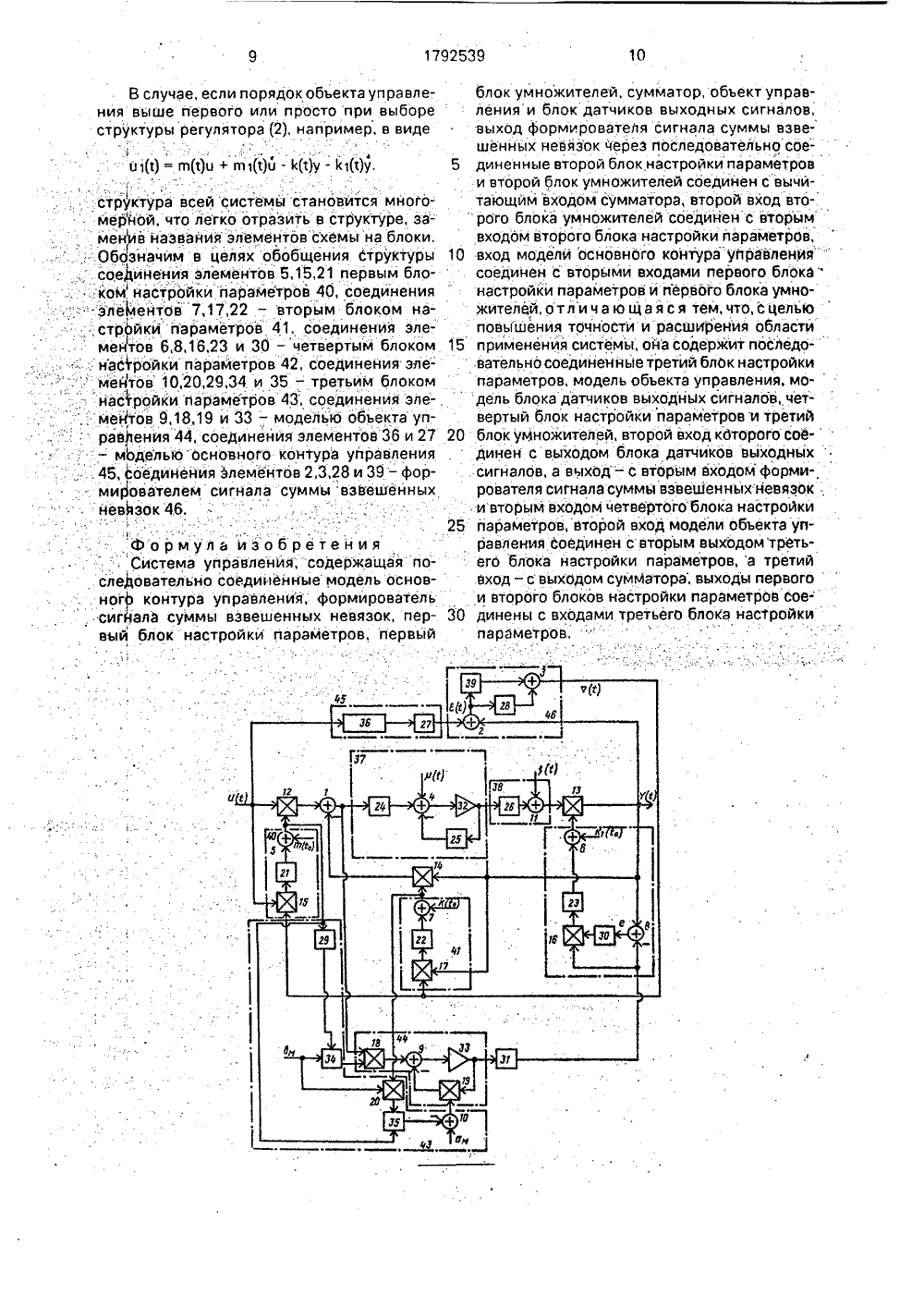
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 925 3 0 5)5 6 0 Я АТЕ лители, , интегрНе те ческих ерения дейстсмотримрядка значение у(т) = ф)х+ ф).ф) =1(т) ф (т) 3) ние объекта управлен еля, э(1), Ь(т), с(т) - пе сф с 1(т), гп(т) - настр регулятора, фт) и кехи, ф = сс 1(т), а ременный параметр,ия, у ремен- аиваеЬ(т) - с 1(1) -где х(т) - состоя - выход измерит ные параметры, мые параметры неизвестные по неизвестный па ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССР(57) Изобретение относится к системам управления нестационарными объектами придействии координатно-параметрических поИзобретение относится к систем равления нестационарными объектам действии координатно-параметри помех измерения, т,е. помех изм мультипликативного и аддитивного вия.Известна система управления квазистационарным объектом, содержащая объект управления, модель системы управления, блоки настройки параметров,Недостатком известной системы является то, что она имеет малую точность управлейия при переменных параметрах измерителя выходных координат системы и действии аддитивных помех измерения,Цель изобретения - повышение точности системы управления нестационарным объектом при действии координатно-параметрических помех измерения выходных координат, объекта и расширение области применения системы.С зтой целью система управления дополнительно содержит три ПИД-регулятора, второй усилитель, первый и второй ния, т.е. помех измерения мульного й аддитивного действия, етения - повышение точности и е области применения системы, равления содержит объект уподель основногоконтура управрмирователь сигнала суммы х невязок, четыре блока настройров, три блока умножителей, сумк датчиков выходных сигйалов, екта управления и модель блока ходных сигналов. 1 ил. мех измере типликатив Цель изобр расширени Система уп равления, м ления, фо взвешенны ки парамет матор, бло модель объ датчиков вы пять умножителей, три сумматоатор.ряя в общности подхода расобъект управления первого по-. = а(т)х+ Ь(т)о+ фг)(1): ОЬЭ начение иф) определено регулятором СЛ6 д (т) = в(т)ц - с(т)у, .(2)измерения у(т) равно1792539 Задача состоит в том, чтобы по измерениям сигналов ц(т) и у(1) обеспечить слежение вектором состоянйя за входным сигйалом ц Из (3) получим после дифферейцирования .5(12) к = сопзт0 и ойределим ее производнуюЧ =К(н+%9 н)+ йнД 1(н+10 у=сх+сх+(1 Б)ДПЬ(ОДПЮуОКоАтоу + Двн ДГтй = к= 2 коСуществует множествосоставляющих Лсн и Дрить соотношениям (140 щие вариантов выбора щн, чтобы удовлетво), Выберем следуюоРу,Дк(9) Ьпь =- .фарп, Ввиду того, что дл ходимо одновреме ваний (17), окон запишем алгоритм регулятора ф) и гл существую-, 45й будем наа (ф) и пФ)в (т) свестизводить поной связи 10) ЦС) 3 с(Со 5 омпенсаО структу ф) из(9),/9 цд 1),Подставим в (4) зйачения х(т) и х(т) из (3) и (1)и получйму с - У.+ с(аХ - ф Ь(гйц - .с с йлй после простых преобразований приве; . дем(5) к видуу = ( + а - сЬк ++ "; - 3, -ху у х у+ СЬао .,ВЗададимэталонйув модель ум =-амум+ Ьмц,:.:.(7)" сЬв =Ьм+Дт(т).и с учетом(8) из(6) й(7) запишеме = а,е+ Ы(т)у+ (с)оДля компенсации реальноЩих в Системе рассогласованистраивать параметры регулятор,такимобразом, чтобы Гй (т) иДк нулю. Настройку будем прои",принцйпу отрицательной обратт) = К(т.)+ (т),гп(т) = Гп(то) + Ьтн(т),Составим уравнение цепи кции, по структуре совпадающей срой цепи возникновения невязки4к - ам Е =. Ьсн(т)у + Д пь(т) ц Выберем функцию Ляпунова Ч =Кюн+ 0,5(Д(н + Ьтн ),+ Д п 1 н Дп 1 н (13) где 9 = е - ам Е,7 н = Жну+ Д внц,,н = (ну+ Д(сну+ Данц+ Дпнц (14)(19) соЬщ = Ьм Сои Ьм а+ - = ам -м(27) с (1)К 1(т) ПриО(1), стремящемся к нулю, значения Лго(1) и Ьф) также стремятся к нулю. Ввиду того, что параметр ам = сопэтО, то уравнение к=Ои О,путемустойчивогодвижения к точке равновесия, Теперь, если в (8) положить с= ф= = О, с(т) = со, Ъ(1) з О, то получим выражения откуда можно определить значения Теперь составим модель с переменными параметрами Модель измерителя примемум СоЕЕсли представитьс(т) = с(т)с 1 где, с(1) - параметр собственно измерителя выходного сигнале. объекта, Мф) - параметр второго регулятора, равныйК 1 = К 1(то) + 1.Й 1 н(%) (25) Задача состоит в том, чтобы найти алгоритм настройки Ась(т) параметра регулятора к 1(т). обеспечивающий гарантированную устойчивость процедур настройки, обеспечивающей равенство х(т) = 2(т). (26)С этой целью запишем из (24),(23) и (3) или в эквивалентном виде СоУ = Со= СК 1 У, 5 Из (28) запишем (опустив для удобства записи т) 10 Введем обозначения с = у - ум, + с к 1 = со + Ь(1(1 ) (30) Ь Со о УмоЬ(1 н = -Л Ум + ЗфгУмбт + " . (34)1 о Окончательно с учетом (25) и (34) запишемалгоритм адаптации параметраок 1(т) = ЦЬ)-Жд ум+3 су умй + ) (35)То На чертеже приведена функциональная схема системы управления. На чертеже и риняты следующие обозначения: сумматоры 1-11, умножитеги 12-20, ПИД-регуляторы 21 - 23, усилители 24 - 26 с переменными вовремени коэффициентами, усилители 27 - 31 - с постоянными коэффициентами усиления, интеграторы 32 - 33, делители 34 - 35, модель 36 системы управления, объект управления 37, измеритель 38 выходного сигнала обьекта, дифференциатор 39. Работает система следующим образомВходной сигнал ц(1) поступает на входы умножителей 12 и 15, С выхода умножителя 12 сигнал проходит через сумматор 1 и поступает на вход объекта управления 37, функциональная схема которого состоит из усилителей 24,25 с переменными коэффициентами усиления, сумматора 4 и интегратора 32, Выходной сигнал объекта 37 поступает на вход измерителя 38, функциональная схема которого, в общем случае, состоит из усилителя 26 с переменным коэффициентом усиления и сумматора 11, на второй вход которого поступает аддитивная помеха ф), Сигнал с выхода измерителя 38 через умножитель 13 поступает через умно- житель 14 на вычитающийвход сумматора 1, Входной сигнал ц(1) системы поступает на вход модели 36 системы и через усилитель 27 на вычитающий вход сумматора 2, на суммирующий вход которого поступает сигнал у(1) с выхода умножителя 13. Сигнал невяэки я(1) с выхода сумматора 2 поступает на суммирующий вход сумматора 3, а через усилитель 28 на вычитающий вход сумматора 3, на выходе которого получается сигнал 9(1), служащий сигналом для формирования параметрических приращений ЙД) и Л гпн(1),Настройка параметра щ(1) производится по алгоритму (18) - второе уравнен"е. Для чего сигналф) в умножителе 15 перемножается с сигналом ц(1) и через ПИД-регулятор 21 поступает нэ первый вход сумматора 5, на второй вход которого подается сигнал гл(1,), На выходе сумматора получается сигнал коэффициента усиления регулятора п(1), который служит для масштабирования входного сигнала ц(1) в умножителе 12,По первому уравнению из (18) формируется сигнал к(1) при помощи аналогичной схемы из элементов 12,22 и 7. На выходе сумматора 7 получается сигнал ф), который умножается в умножителе 14 с сигналом у(1), а результирующий сигнал с выхода умножитепя 14 в качестве обратной связи поступает на вычитающий вход сумматора 1. При этом настройка значений гп(1) и к(1) прекращается при(1) = О.Очевидно, что при ч(1) = 0 настройкой параметров регулятора будут скомпенсированы параметрические отклонения Лв(1) и ЬК(1), а также сигнальная помеха р(1). Новвиду того, что измерения неточны, т,к, действуют параметрические возмущения на измеритель и параметр сф) точно не известен.5 Кроме того, нэ измерения накладываютсяаддитивные сигнальные помехи ф), о которых ничего не известноБлоки 29,34 и 18 формируют коэффициент модели Ьл(1) из (22), а блоки 20,35,19 и10 10 коэффициент модели а(1), которые найдены при условии, что на вход поступаетсигнал ц 1(1), э сигнал ф) не поступает и параметрическая помеха на модель измерителя- усилитель 31 не действует, Таким образом15 отличием модели объекта 37, составленной изэлементов 29,34,18,9,33,31;19,10,20 и 35, является отсутствие координатно-параметрической помехи измерения, Параметры моделиам(1) и Ьм(1) найдены также без учета этой20 помехи,Если теперь обеспечить равенство сигналов с выходов умножителя 13 и усилителя31 путем коррекции параметра с 1(1), то можно будет тем самым ликвидировать дейст 25 вие координатно-параметрической помехиизмерителя 38.Алгоритм формирования сигнала коррекции Жз(1) по формуле (34) реализуетсяблоками 8,30,16,23 и 6, На выходе суммато 30 ра 6 получается сигнал к 1(1), поступающийна вход умножителя 13, в котором умножается нэ выходной сигнал измерителя 38, приэтом 1 ц(1) меняется таким образом, чтобысвести разность е(1) = у(1) - сог к нулю.35 Уточнение у(1) приведет к изменениюнастройки параметров в(1) и к(1) регулятора,а ЗНаЧИт И ПараМЕтрОВ МОДЕЛИ ал(1) И Ьл(1),Таким образом, будет полностью компенсировано действие параметрических возму 40 щений Ь ф) и Ьп(1) и координатной помехи,и(1), а также компенсированы помехи измерения Ьс 1(1) = с 1(1) - со, ф (1) .При этом будетпроведена компенсация этих ошибок не всреднем, а по мгновенным значениям. При45 большой скорости контуров настройки параметров блоков 12,14 и 13 динамика системы будет близка к динамике эталонноймодели 36 с измерителем 27,Повышение точности и расширение обла 50 сти применения достигается путем компенсации возмущений по принципу обратнойсвязи, а не компенсации их в среднем, приэтом нет необходимости в какой-либо априорной информации о действующих коорди 55 натно-параметрических возмущениях,Последнее обстоятельство позволяет расширить область применения адаптивной системы, т.к. такую задачу система, принятая запрототип, не решает,1792539 10 иВ случае, если порядок объекта управления выше первого или просто при выборе структуры регулятора (2), например, в видео з(с) = пзфц + в ф)й - с(1)у - Зсмк)у. структура всей системы становйтся многомерной, что легко отразить в структуре, заменив названия элементов схемы на блоки, Обозначим в целях обобщения структуры . соедйнения элементов 5,15,21 первым блоком йастройки "параметров 40, соединения злейейтов 7,17,22 - вторым блоком на,стройки параметров 41. соединения элементов 6,8,16,23 и 30 - четвертым блокомнастройки параметров 42, соединения зле- мейтов 10,20,29,34. и 35 - третьим блоком настройки параметров 43, соединения элементов 9,18,19 й 33 - моделью объекта уп равления 44, соединения злементов 36 и 27- модельюосновного контура управления . 45, соедйнения злементов 2,3,28 и 39 - формирователем сигнала суммы взвешенных невязок 4.6. Формула изобретения Система управления, содержащая последовательно соедииенные модель основног контура управления, формирователь . сигнала суммы взвешенных невязок, первый блок настройкй параметров, первый блок умножителей, сумматор, обьект управленияи блок датчиков выходных сигналов,выход формирователя сигнала суммы взвешенных невязок через последовательно сое 5 диненные второй блок настройки параметрови второй блок умножителей соединен с вычйтающим входом сумматора, второй вход второго блока умножителей соединен с вторымвходом второго блока настройки параметров,10 вход модели основного контура управлениясоединен с вторыми входами первого блоканастройки параметров и первого блока умножителей, о тли ч а ю щ а я с я тем, что, с цельюповышения точности и расширения областй15 применения системы, она содержит последб.вательно соединеййы)е третий блок настройкипараметров, модель объекта управления, модель блока датчиков выходных сигналов, четвертый блок настройки параметрови третий20 блок умножителей, второй вход которого соединен с выходом блока датчиков выходных:сигналов, а выход - с вторым входомформирователя сигнала суммйвзвешенных невязок .и вторым входом четвертогоблока настройки25 параметров, второй вход модели объекта управления соединен с вторым выходомтретьего блока настройки параметров, э третийвход - с выходом сумматора; выходы первогои второго блоков настройки параметров сое-30 динены с входами третьего блока настройкипараметров,
СмотретьЗаявка
4949806, 28.06.1991
А. Я. Лащев
ЛАЩЕВ АНАТОЛИЙ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки:
Опубликовано: 30.01.1993
Код ссылки
<a href="https://patents.su/5-1792539-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система управления</a>
Устройство для выделения артикуляционных сигнал-параметров и сигнал-остатка речевого сигнала

Номер патента: 142698
Опубликовано: 01.01.1961
Автор: Акинфиев
МПК: H04B 13/00
Метки: артикуляционных, выделения, речевого, сигнал-остатка, сигнал-параметров, сигнала
...Для выделения артикуляционных сигнал-параметров и сигнал-остатка речи в ней используется линейны контур 1, с переменными параметрами, возбуждаемый речевым сообщением г(г), которое поступает по входу 2. Линейный контур 1 соединен с датчиком 3142698статистических параметров анализируемой случайной функции х(1) через устройство 4 согласования контура с датчиком. В цепях обратной связи включены, обостряющие устройства 5. При достаточно большом усилении по петле обратной связи устанавливается равновесие. Ряд статистических параметров сигналов х,(1) и х,(1), по которым осуществляется авторегулирование, поддерживается постоянным. При этом из речевого сигнала г(1) отфильтровывается информация и выделяется в виде сигнал-параметров у, (1)у(1)...
Система управления нестационарным нелинейным объектом с эталонной моделью

Номер патента: 2003163
Опубликовано: 15.11.1993
Автор: Лащев
МПК: G05B 13/00
Метки: моделью, нелинейным, нестационарным, объектом, эталонной
...нестационарному, но линейному позволяет исключить операцию линеаризации исходного дифференциального уравнения даже в случае больших отклонений.+Сспри) Если теперь подставить уравнения (29) вуравнения (6), то получим а (с) - Ь,(т)(с(то) + Ь 3 сн(т) = а + с(т), Ь,(т)Еп 1(1 о) - Ьпн(1)3 = Ь + Ьтъ 1(1), (30)2003163 Формула изобретения ческого сумматора, подключенного неинСИСТЕМА УПРАВЛЕНИЯ НЕСТАЦИО- вертирующим входом к первым входам НАРНЫМ НЕЛИНЕЙНЫМ ОБЬЕКТОМ С второго и четвертого блоков умножения, а ЭТАЛОННОЙ МОДЕЛЬ 10, содержащая выходом соединенного с вторыми входами обьект управления, подключенный входом 50 третьего и четвертого блоков умножения, к выходу первого алгебраического сумма- которые подключены выходами к входам...
Устройство для контроля и настройки текущих характеристик объекта управления

Номер патента: 188544
Опубликовано: 01.01.1966
МПК: G05B 23/02
Метки: настройки, объекта, текущих, характеристик
...К-го фильтра, 1 а - мнимый аргумент.Пусть на входы фильтров поступают импульсные сигналы произвольной формы и длительности, определенные на интервале времени (О, Т:х = сопз 1 1 (Ох(Ц = х 2 = х О(1 (Тх =- сопз 1 г) Т,где х, х, - постоянные, в частном случае равные нулю, а хф - конечно, и его производные существуют. Тогда для каждого К-го фильтрахф (1 щ)=1 щхОщ)Ф)п - п 2кВ соответствии с правилами преобразованияФурье- з 1 п а,и 22(3)1 ах(1 а) +- - 1 х(г)+С, = х(1).Тогда во временной области выходной сигнал каждого К-го фильтра выражается интегралом свертки:х ф = 1 Б 1 п ш(1 - ох о)1. (4)оТак как по условию изменение сигнала х ограничивается временем Т, то для всех 1 = Т справедливо соотношениетхпт =ап щ,( - ц х О) ш, (5)которое после...
Устройство восстановления речевого сигнала в системах вывода информации голосом

Номер патента: 645197
Опубликовано: 30.01.1979
Авторы: Андрущенко, Дубовых, Золотарев, Королев
МПК: G10L 13/02, G10L 19/02
Метки: восстановления, вывода, голосом, информации, речевого, сигнала, системах
...Л. Тарасова и Т. Дооровольска Изд.1 Подписи Тираж 454 Заказ 2634/1 ипограф авунова позволяющие восстанавливать речевой сигнал с ошибкой, не превышающей заданную.Для обозначения моментов исключениянесущественных отсчетов приращений используется вспомогательный массив предсказаний Р, значение которого Р(1) = О в том случае, если предыдущее значение а; не может быть использовано для восстановления значения речевого сигнала в следующий момент времени и Р(1) = 1 в том случае, если предыдущее значение аД может быть использовано для получения слелдующего значения х;+ восстанавливаемого сигнала.Устройство работает следующим образом,Первое значение числового массива слова а(1) поступает на вход блока 1 декодирования, затем на вход коммутатора...
Устройство кодирования речевого сигнала в системах вывода информации голосом

Номер патента: 748498
Опубликовано: 15.07.1980
Авторы: Андрущенко, Дубовых, Золотарев, Королев
МПК: G10L 19/02
Метки: вывода, голосом, информации, кодирования, речевого, сигнала, системах
...устройства. 20Устройство содержит блок квантования1, вентиль 2, кодер 3, второй элемент задержки 4, первый коммутатор 5, первый элементзадержки 6, второй коммутатор 7, первыйсумматор 8, пороговую схему 9, второй 25сумматор 10, третий элемент задеркки11, четвертый элемент задержки 12,блок управления 13,Запоминающее устройство, подключенное к выходу кодера (не показано), записывает не каждое значение приращения речевого сигнала О ( 1 ), полученное методом ДИКМ, а только те, которые необходимы для восстановления речевогосигнала с ошибкой, не превышающей заданную величину г. В случае, если для восстановления речевого сигнала на 1 - Мшаге может быть использовано приращение речевого сигнала, полученное на. -1) м шаге, то значение...
Предыдущий патент: Фотополимеризующийся состав
Следующий патент: Многопроцессорная вычислительная система
Случайный патент: Предохранительный сильфонный клапан