Система терминального управления пространственным угловым маневрированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
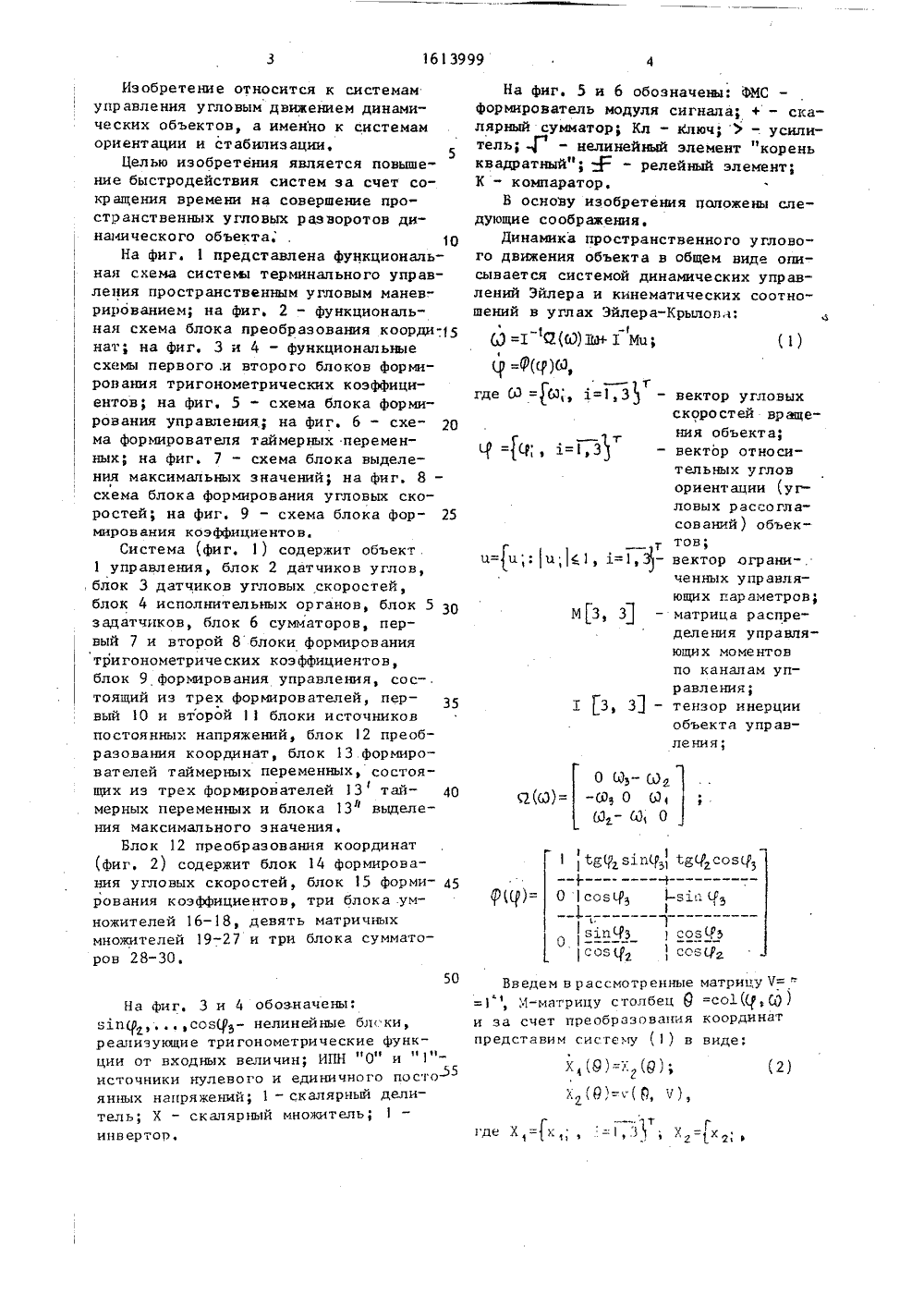
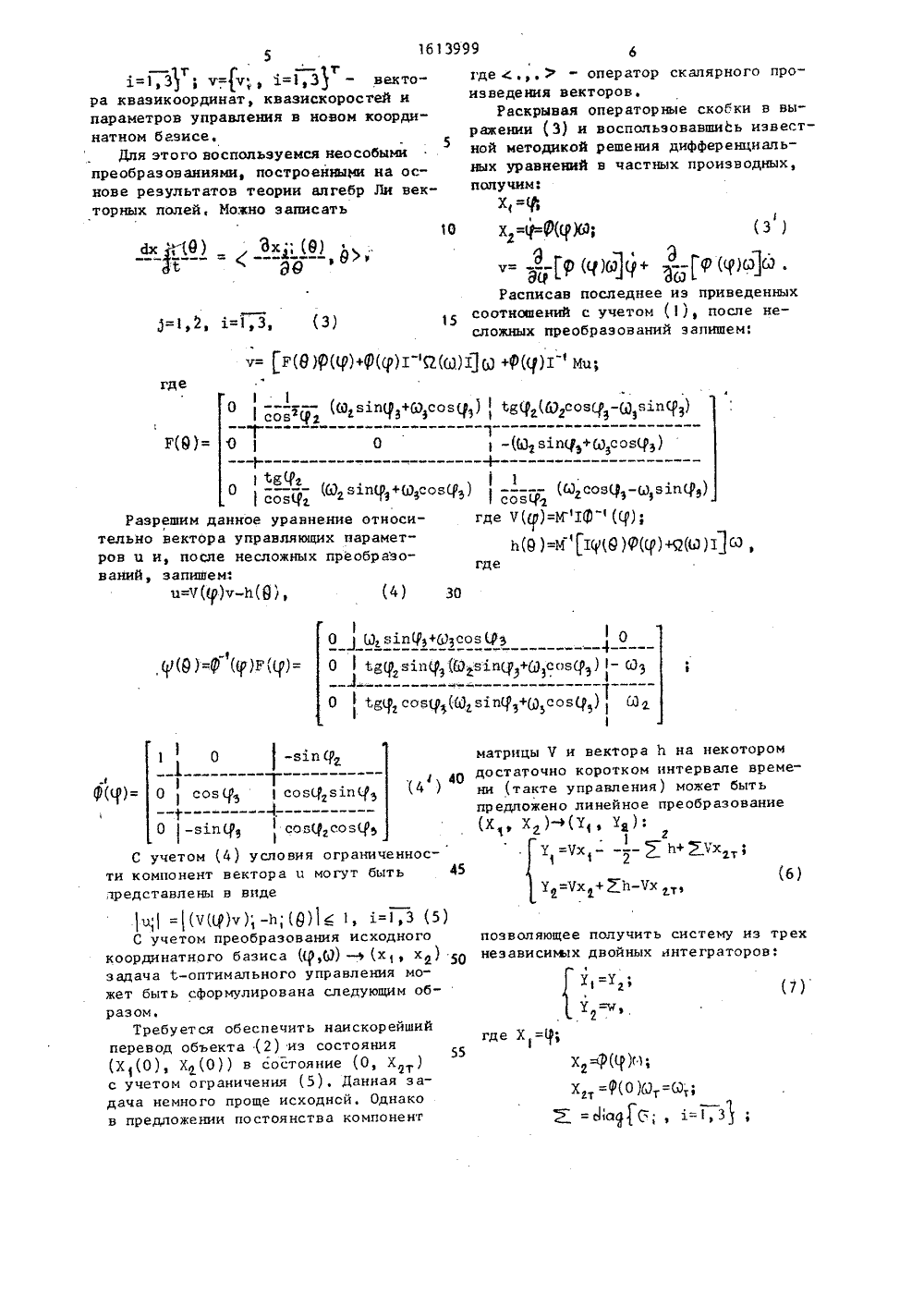
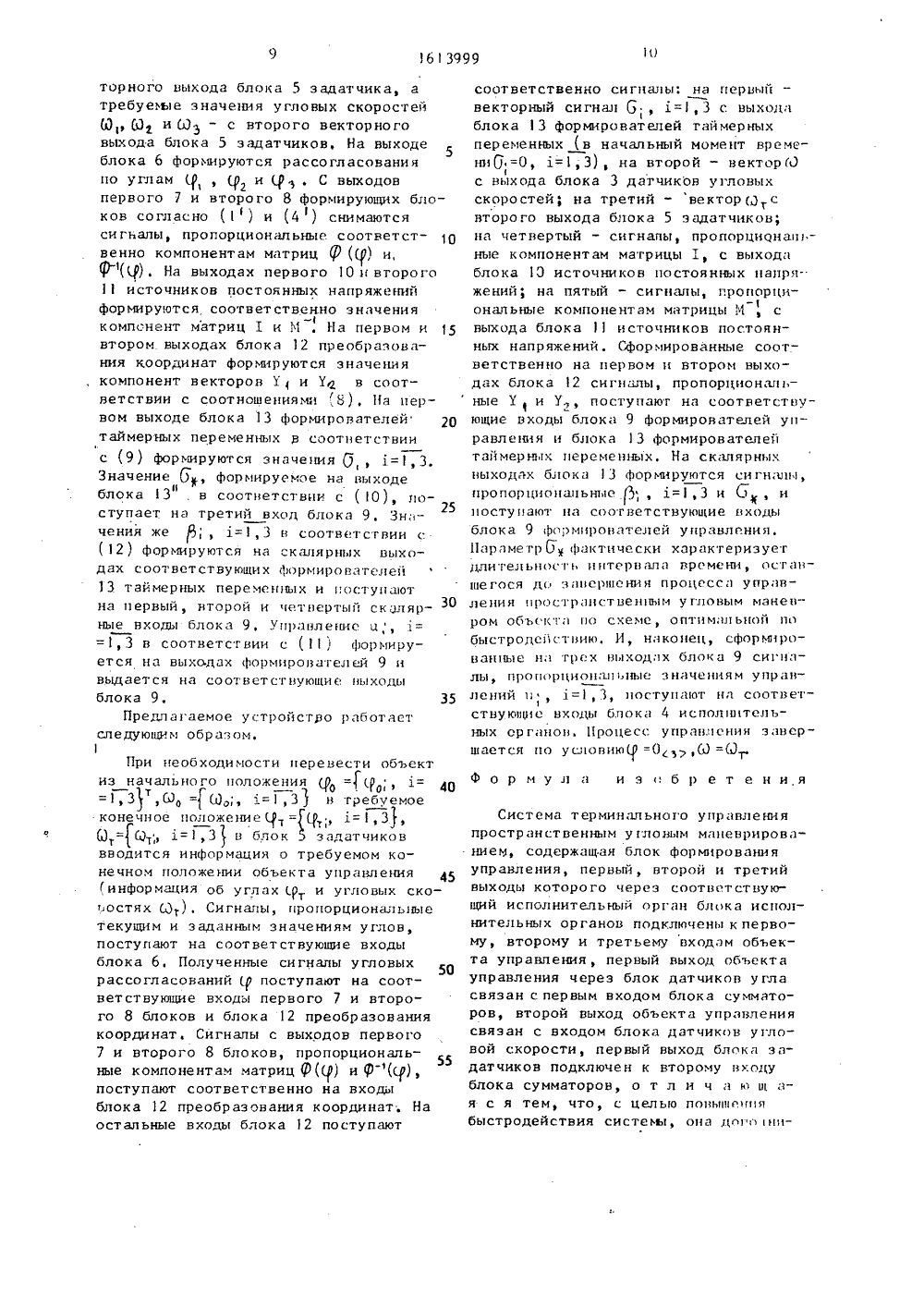
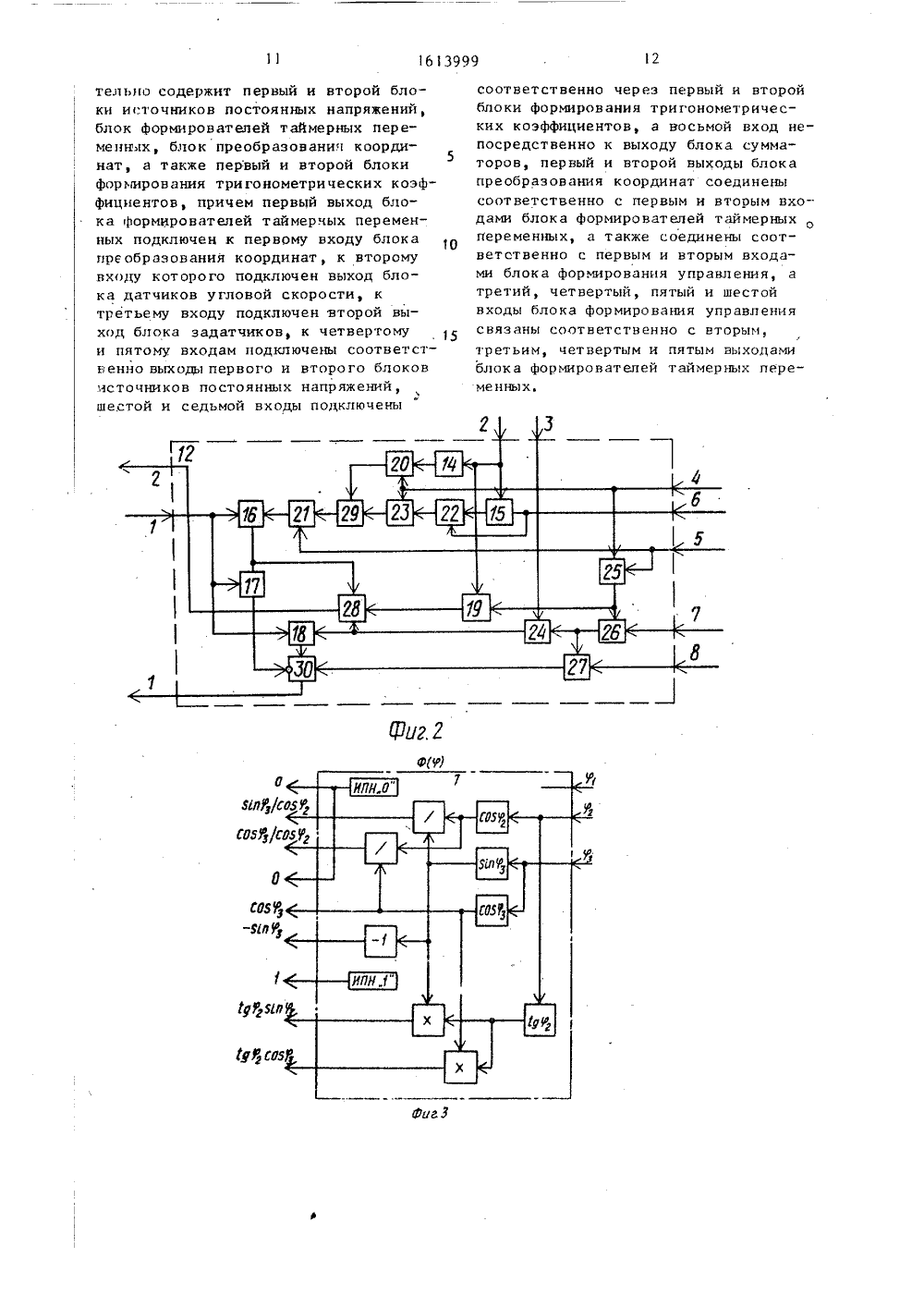
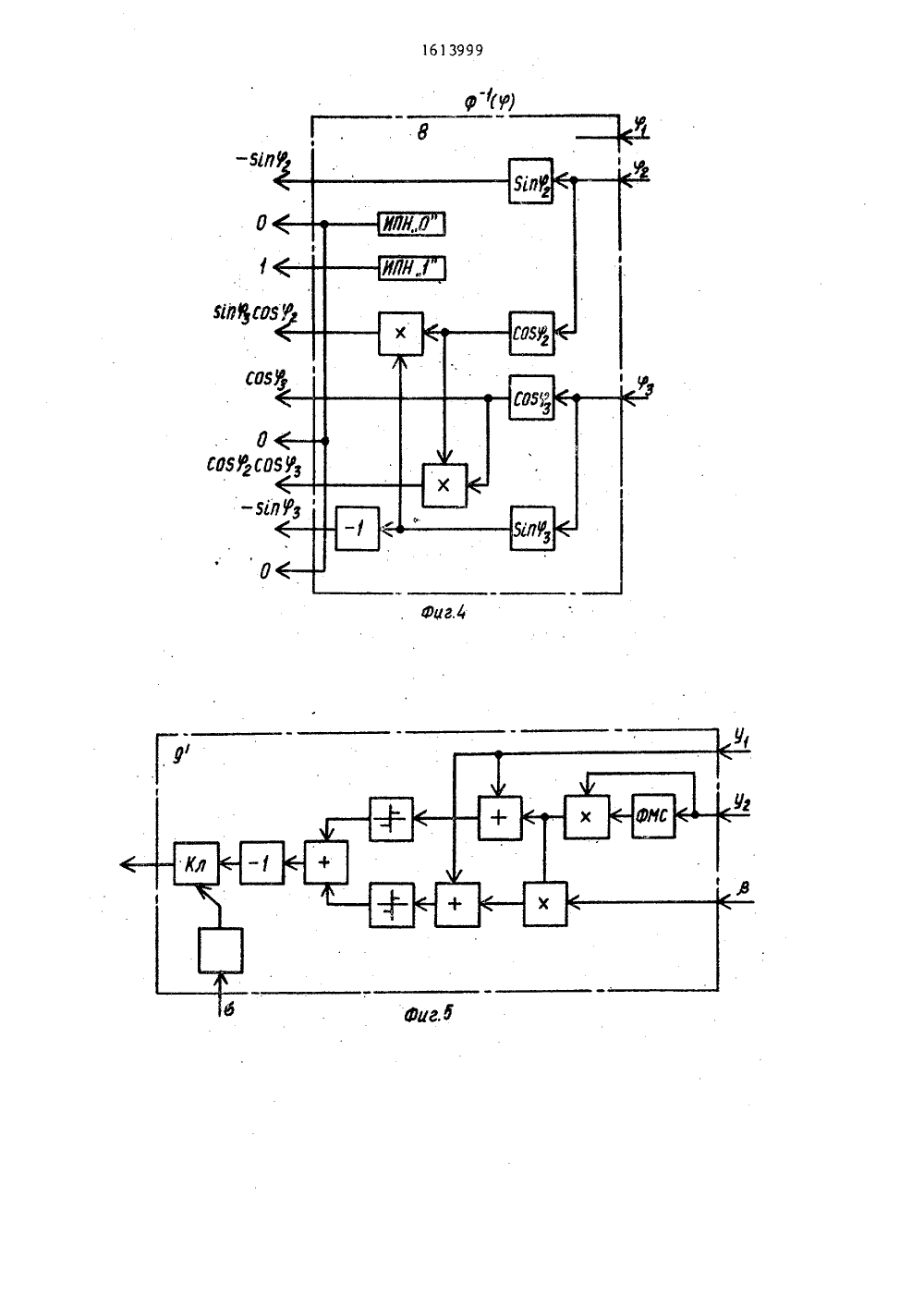
СООЗ СОВЕТСКИХаицюпнэиРЕСГ 1 У БЛИК 91 (И А 1 1 99 51)5 О 05 В 13/00 ГОСУДАРСТВЕННЫЙ КПО ИЭОБРЕТЕКИЯМ И ОТНПРИ ГКНТ СССР РЫТИЯМ Ы 8 Юйй 1БНЛВ" ":,".;Л . БХБВ 1 О. ОПИСАНИЕ ИЗОБРЕТЕНИЯН АВТОРСКОМУ СВИДЕТЕЛЬСТВУ М Ф СФ ФОИ(56) Авторское свидетельство СССРУ 1362308, кл, 0 05 В 1300, 1988.(54) СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯПРОСТРАНСТВЕННЫМ УГЛОВЫМ МАНЕВРИРОВАНИЕМ(57) Изобрете:ие касается систем управления угловым движением динамических объектов, а именно систем ориен-,тации и стабилизации. Целью изобрете 2ния являетсм повышение быстродействия систеж за счет пространственных уг-: ловых разворотов динамического объекта. Система терминального. управления содержит объект управления 1, блок датчиков углов 2, блок датчиков угловых скоростей 3, блок исполнительных органов 4, блок задатчиков 5, блок сумматоров 6, первый 7 и второй 8 блоки формирования тригонометрических коэффициентов, блок формирователей управления 9, первый 10 и второй 11 блоки источников постоянных напряжений, блок преобразования координат 12, блок формирователей таймерных переменных. 9 ил.Изобретение относится к системамуправления угловым движением динамических объектов, а именно к системамориентации и стабилизации,Целью изобретения является повышение быстродействия систем за счет сокращения времени на совершение пространственных угловых разворотов динамического объекта. 10На фиг. 1 представлена функциональная схема системы терминального управления пространственным угловым маневрированием; на фиг. 2 - функциональная схема блока преобразования коорди нат; на фиг. 3 и 4 - функциональныесхемы первого .и второго блоков формирования тригонометрических коэффициентов; на фиг. 5 - схема блока формирования управления; на фиг. 6 - схема формирователя таймерных переменных; на Фиг. 7 - схема блока выделения максимальных значений; на фиг. 8 -гсхема блока формирования угловых скоростей; на фиг. 9 - схема блока формиров ания коэффициентов.Система (фиг. 1) содержит объект .1 управления, блок 2 датчиков углов,, блок 3 датчиков угловых скоростей,блок 4 исполнительных органов, блок 5 30задатчиков, блок 6 сумматоров, первый 7 и второй 8 блоки формированиятри гонометриче ских коэ ффициенто в,блок 9 формирования управления, сос-.тоящий из трех Формирователей, первый 10 и второй 11 блоки источниковпостоянных напряжений, блок 12 преобразования координат, блок 13 формирователей таймерных переменных, состоящих из трех Формирователей 13 таймерных переменных и блока 13 выделенния максимального значения.Блок 12 преобразования координат(фиг. 2) содержит блок 14 Формирования угловых скоростей, блок 15 формирования коэффициентов, три блока умножителей 16-18, девять матричныхмножителей 19-27 и три блока суммато -ров 28-30,50 На фиг. 3 и 4 обоз.начены:з 1 п(1 , соз(- нелинейные блт. ки,реализующие тригонометрические Функ 11 1 11 11ции от входных величин; ИПН О и 1=1 ф, М-матрицу столбец О =соЗ.(11 грЯ ) и за счет преобразования координат представим систему (1) в виде;.,0)=(р, ч),(2) На фиг. 5 и 6 обозначены: ФМСформирователь модуля сигнала; + - скалярный сумматор; Кл - Ключ;в . усилитель; 1 " нелинейный элемент "кореньквадратный"; - релейный элемент;К - компаратор.сБ основу изобретения положены следующие соображения,Динамика пространственного углового движения объекта в общем виде описывается системой динамических управлений Эйлера и кинематических соотношений в углах Эйлера-Крылокл:еЯ =1 Я(М) 1 ц+ 1 Мц; (1)=Ф(ц)О,тгде У = Я;, з.=13 - вектор угловыхскоро ст ей вр ащения объекта;С 1 =111 т1,31 - вектор относительных угловориентации (угловых рассогласований) объектов 1и=1 и;:о;с 1, тщ 1, - вектор ограни-.ченных управляющих гараметров;М 3, 3 - матрица распределения управляющих моментовпо каналам управленияия;1 13, 31 - тензор инерцииобъекта управле ни я;5 16139991=1,3); чч., 1=1,3 - вектора квазикоординат, квазискоростей и параметров управления в новом координатном базисе. РДля этого воспользуемся неособыми н преобразованиями, построенными на основе результатов теории алгебр Ли век" торных полей, Можно записать де с- опер атор ск аляр но го прозведения векторов.Раскрывая операторные скобки в выажении (3) и воспользовавшись известой методикой решения дифференциальных уравнений в частных производных,Олу чим ефх,=1 О Х =6(фО; (3).= (р ф)+;-(ФФФ ЭЗц (ИРасписав последнее из приведенныхсоотношений с учетом (1), после несложных преобразований запишем:матрицы 7 и вектора й на некотором достаточно коротком интервапе времени (такте управления) может быть предложено линейное преобразование (х, х )-е(х 1, ха)Х:Чх - --ь+,ух1 1 2 йт(4 ) Ф= 10 1 соя ч" 1 сояц яЫз соЩ соя(з 0-я 1.пЦ С учетом (4) условия ограниченности компонент вектора и могут быть 45 )тредставлены н виде1 =(Ч(ч); -1); Щ)1 с 1 =1,3 (5) С учетом преобразования исходного координатного базиса ,У) -(х, х) 50 задача т,-оптимального управления может быть сформулирована следующим образом.Требуется обеспечить наискорейший перевод объекта (2) из состояния(Х 1(0), Х(0 в состояние (О, Х т) с учетом ограничения (5), Данная задача немного проще исходной, Однако в предложении постоянства компонент(6) Х =х +2 и-Чх т позволяющее получить систему из трехнез ави симых двойных инте граторов;х,=х,;=ч,2 где Х =ф1 Х 2=Ф(Ч)1 Хт =ф(0 Ют =%1Х =йаГ :1,3,Разрешим данное уравнение относительно вектора управляющих параметров и и, после несложных преобразований, запишем; где У(:МТР (фа=мГнре)фар)М) 1.тельно содержит первый и второй блоки источников постоянных напряжений,блок формирователей таймерных переменнях, блок преобразования координат, а также первый и второй блокиформирования тригонометрических коэффициентов, причем первый выход блока формирователей таймерчых переменных подключен к первому входу блокапре обр аз ов ания координат, к второмувходу которого подключен выход блока датчиков угловой скорости, ктретьему входу подключен второй выход блока задатчиков, к четвертомуи пятому входам подключены соответственно выходы первого и второго блоковисточников постоянных напряжений,шестой и седьмой входы подключены соответственно через первый и второйблоки формирования тригонометрических коэффициентов, а восьмой вход непосредственно к выходу блока сумматоров, первый и второй выходы блокапреобразования координат соединенысоответственно с первым и вторым входами блока формирователей таймерных опеременных, а также соединены соответственно с первым и вторым входами блока формирования управления, атретий, четвертый, пятый и шестойвходы блока формирования управлениясвязаны соответственно с вторым,третьим, четвертым и пятым выходамиблока формирователей таймерных переменных.1613999 Фсрщрующи як Я б/ганг стави хред Л Корректор Н, Ревская едактор А.Лежни роизводственно-издательский комбинат "Патент", г, Ужгор Гагарина, 101 ОШр 5 сП 9+ Зак аз 3892ВНИИПИ Государ ль В. ХромоСердюкова Тираж 662 Под пи с ноеенного комитета по изобретениям и открьггиям при ГКНТ СССР 13035, Москва, Ж, Раушская наб., д. 4/5
СмотретьЗаявка
4468819, 01.08.1988
ВОЕННЫЙ ИНЖЕНЕРНЫЙ КРАСНОЗНАМЕННЫЙ ИНСТИТУТ ИМ. А. Ф. МОЖАЙСКОГО
ЧЕРНЫШ ВАСИЛИЙ ВЛАДИМИРОВИЧ, МАНУЙЛОВ ЮРИЙ СЕРГЕЕВИЧ, ШАЛЫМОВ СЕРГЕЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: маневрированием, пространственным, терминального, угловым
Опубликовано: 15.12.1990
Код ссылки
<a href="https://patents.su/9-1613999-sistema-terminalnogo-upravleniya-prostranstvennym-uglovym-manevrirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Система терминального управления пространственным угловым маневрированием</a>
Блок формирования тригонометрических коэффициентов для процессора дискретного преобразования фурье

Номер патента: 1072056
Опубликовано: 07.02.1984
Авторы: Звягинцев, Павлусь, Шевченко
МПК: G06F 17/14
Метки: блок, дискретного, коэффициентов, преобразования, процессора, тригонометрических, формирования, фурье
...входу формирователя приращений адреса, выход которого подключен к информационному входу регистра адреса, тактовый вход счетчика итераций соединен с выходом последнего разряда счетчика циклов, информационный выход которого подключен к второму входу формирователя приращений адреса, причем тактовый вход счетчика циклов является первым тактовым входом блока, тактовые входы первого и второго узлов постоянной памяти объединены и являются вторым тактовым входом блока, содержит формирователь дополнительного кода, шесть элементов И и три элемента ИЛИ, инверсный выход стар щего разряДа регистра адреса соединен с первыми входами первого, второго и третьего элементов И, прямой выход старшего разряда, регистра адреса подключен к первы 3 входам...
Блок формирования адресов для устройства, реализующего быстрое преобразование фурье

Номер патента: 548863
Опубликовано: 28.02.1977
Авторы: Гречишников, Степанян
МПК: G06F 17/14
Метки: адресов, блок, быстрое, преобразование, реализующего, устройства, формирования, фурье
...от номера итерации приведены в таблице.Очевидно, чго коды нижних и верхних адресов в -й итерации отличаются лишь в одном разряде, причем номер этого разряда в течение всей итерации постоянен и равен номеру итерации. Поэтому, если в кодах верхних адресов значение данного разряда заменить на противоположный, то получим последовательность нпкних адресов для данной итерации,Таким образом, в первой ятерацип для формирования кодов нижних адресов необходимо произвести логическое сложение старшего разряда верхнего адреса с признаком первой итерации, во второй итерации - второго разряда, начиная со стороны старшего, с признаком второй итерации и т, д. При реализации безызбыточного алгоритма БПФ или при одновременном выполнении БПФ над двумя...
Блок формирования адресов для устройства, реализующего быстрое преобразование уолша

Номер патента: 1104526
Опубликовано: 23.07.1984
Авторы: Гринчук, Коркмазский, Шарафан
МПК: G06F 17/14, G06F 9/34
Метки: адресов, блок, быстрое, преобразование, реализующего, уолша, устройства, формирования
...объединение соответствующих сигналов группы элементов И 4 и формирование на своих выходах разрядов с 2-го по(и - 1) -й адреса первого операнда, При этом младшим и старшим разрядом адреса первого операнда являются выходные сигналы первого и последнего элементов группы элементов И 4.Группа элементов ИЛИ 6 осуществляет объединение входных информационных сигналов блока, представляющих собой позиционный код номера итерации и соответствующих разрядов адреса первого операнда,и формирует на своих выходах адрес второго операнда. Мальтиплексор 7 представляет собой цифровой четырехканальный мульиплексор и осуществляет выдачу на информационный выход 8 блока одного иэ четырех и+2) -разрядных адресов: адреса входных данных, адреса первого...
Устройство формирования адресов для контроля блоков памяти

Номер патента: 1249587
Опубликовано: 07.08.1986
Авторы: Боголюбова, Веккер, Нейман, Плешев
МПК: G11C 29/00
Метки: адресов, блоков, памяти, формирования
...код первого адреса подмассиваМ для записи по нему информации, инверсной исходной. Далее блок 1 управления устанавливает на выходе 15сигнал "Считывание", а на управляющем входе коммутатора 4 - сигнал,разрешающий передачу на выходы 5 кода адреса, формируемого на выходахэлементов И группы 10.Далее устройство выполняет первый цикл Формирования адресных переходов, в котором осуществляются пере.ходы от каждого адреса подмассива к,первому адресу подмассива М, Дляэтого в каждом периоде обращения кблоку памяти блок 1 управления меняет уровень сигнала на управляющемвходе коммутатора 4, в соответствиис чем на выходы 5 через коммутатор 4поочередно поступают коды адресовподмассивов М и Б. По спаду сигналаблока управления, поступающегонасчетный...
Блок оптической связи оптических логических блоков

Номер патента: 1596340
Опубликовано: 30.09.1990
Автор: Вербовецкий
МПК: G06F 13/14
Метки: блок, блоков, логических, оптических, оптической, связи
...15, первый выход которого через телескоп1 б оптически связан с лазером 17,а второй выход куба является выходомузла 3. Оптически управляемый транспарант может быть выполнен на основе жидких кристаллов. Узел 3 может ,состоять также, например, из оптически связанных дифракционной решетки и матрицы голограмм, которые могут быть выполнены, например, на отбеленных фотослоях или желатиновых слоях. Узел 4 синхронизации (фиг.2) может содержать генератор 18 синхроимпульсов и формирователи 19 и 20управляющих сигналов.Блок оптической связи оптическихлогических блоков работает следующим образом,Предположим, чтологический блокА, имеющий 1. (где= 1, 2, Зг;г - число логических ячеек в блокеА) выходов, необходимо оптически связать с К (где К = 1, 2, Зп;...
Предыдущий патент: Устройство для измерения суточного хода часов
Следующий патент: Система ситуационного управления
Случайный патент: Воздухораспределитель