Патенты с меткой «самонастраивающаяся»
Цифровая самонастраивающаяся система с комбинированным управлением

Номер патента: 1180842
Опубликовано: 23.09.1985
МПК: G05B 13/02
Метки: комбинированным, самонастраивающаяся, управлением, цифровая
...поступлении на вход системы дискретного входного воздействия г(п) вычисляются его первая 7 г(п) и вторая ч г(п) разности. Первая разность - сложение текущего дискретного входного воздействия г(п), поступающего на первый вход третьего сумматора 4, с его инверсным значением, записанным в первый регистр 5 памяти в предыдущий момент квантогания г(п) и поступающим на второй вход этого сумматора, Для получения на3 11808 выходе третьего сумматора 4 значения первой разности в прямом коде к полученной сумме прибавляется единица: чг(п) = г(п) - г(п)= г(п) + г(п) + 1. Сигнал первой разности поступает на первый вход четвертого сумматора 6,на котором аналогично производится вычисление второй разности Чг(п) входного воздействия, Текущее значение...
Самонастраивающаяся система регулирования скорости

Номер патента: 1180844
Опубликовано: 23.09.1985
Авторы: Аржанов, Копытов, Фадеев
МПК: G05B 13/02
Метки: самонастраивающаяся, скорости
...первой производной ошибки регулирования.Выходной сигнал первого выпрямителя 17 поступает на управляющий вход первого усилителя 15 с переменным коэффициентом усиления. С помощью первого дифференцирующего звена 13 осуществляется получение первой прЬизводной выходного сигнала задатчика 1 скорости, причем данный сигнал через первый усилитель 15 поступает на второй сумматор 4, как положительная параллельная связь. Регулирование величины производной, поступающей на вход второго сум. матора 4 через первый усилитель 15,. производится в функции ошибки регулирования. Выходной сигнал второго выпрямителя 19 подается на управляющий вфд второго усилителя 16 с перемейным коэффициентом усиления. С помощью второго дифференцирующего звена 14...
Самонастраивающаяся система для регулирования объектов с запаздыванием

Номер патента: 1236422
Опубликовано: 07.06.1986
Авторы: Вахнин, Дубров, Назаренко, Тарханов
МПК: G05B 15/00
Метки: запаздыванием, объектов, самонастраивающаяся
...(ОСбхоб (1)СЕто первый пороговый элемент 18 вырабаты- О вает сигнал, равный О, в результате чего первый вентиль 17 на своем выходе сиг.нала не вырабатывает. Поступающий на инвертор 19 сигнал сбхоб (1)алвторым пороговым элементом 21 вырабаты вается сигнал, равный 1, который поступает на второй вход второго вентиля 20. В резуль.сбхобт.(1)тате этого сигнал) 0 поступает на первый вход блока 23 сравнения.СбХоб (1)20В случае, если) О, преобразосбхобт. (1)ванный инвертором 19 сигнал ( 0сбне проходит через второй вентиль 20. Таким образом, на первый вход блока 23 сравненияхоб (1) 5 всегда поступает сигнал, равный/,41 В задатчике 22 задано пороговое значение 51 характеризующее наличие переходного процесса на объекте 2 регулирования. На второй...
Самонастраивающаяся система

Номер патента: 1241192
Опубликовано: 30.06.1986
МПК: G05B 13/02
Метки: самонастраивающаяся
...Графики функций КУЗи Куо3 при ; = Ь(А) имеют вид кривых соответственно .22 и 23 нафиг. 2, При= О, КуоКУО ф = О. Если(о(й) изменится (например, увеличится) на д(. р то максимумы функций К цо р Кщ (Т соответственно сместятся на Д, и функции КУ р Кю будут иметь вид кривых соответственно 24 и 25 на фиг. 2, т.е. в точке= О значения Функций отличаются друг от друга на величину а К о Н) -Ч (Х - . К но(о) (о (а),(д) Следовательно, величина дК характеризует отклонение времени запаздывания Сц(3) модели объекта регулирования от времени запаздывания(. (г) объекта Регулирования 3 и может быть использована для настройки времени запаздывания м (ЯД модели объекта регулирования при изменении времени запаздывания (о объекта регулирования 3.Первый блок...
Самонастраивающаяся система управления с сигнальной настройкой

Номер патента: 1244635
Опубликовано: 15.07.1986
Авторы: Гориловский, Гудков, Ходько
МПК: G05B 13/02
Метки: настройкой, самонастраивающаяся, сигнальной
...функция замкнутой системы может быть записана в виде 40 ьф= где У -то 50 Р= Ч ьГ(1) где Ч - желаемая передаточнаяфункция,ьР - отклоненияреальной передаточной функции от желаемой (втом числе и внешние возмущения).Сигнал на выходе системы управле-, ния будет иметь видк. Я1где У - сигнал на выходе системы управления,ГР - сигнал на входе системы управления.Для работы системы необходимо подать дополнительный сигнал П, тогдавыходной сигнал будет иметь виду =ф(Р + Ц)или с учетом (1)т:= (Ф+ ь р) (Р + 11): г + П +=-;Е. Ч(1 а)- 9(1 дЦ)ГС-Д)при:=.1 и=ь 1 ШьОЧ(01 = -(ЮЮ-Ч, ьи) Г(о 1,Г(о 1О(а 11=-(Ч (ьЦм(И 1так к 4 к за начальный можно принятьлюбой момент времени, то выражение (2)справедливо для всей временной оси,Система управления...
Самонастраивающаяся система управления
Номер патента: 1249478
Опубликовано: 07.08.1986
Авторы: Бабкин, Борцов, Второв, Григорьев
МПК: G05B 13/02
Метки: самонастраивающаяся
...вызываетизменение выходного сигнала первогоинтегратора 14, который вычитаетсяв четвертом сумматоре 15 из цифрового сигнала датчика 8 скорости. Навыходе четвертого сумматора 15 появляется отрицательный сигнал ошибки,Этот сигнал, будучи умножен во вто 1249478ром умножителе 6 на положительный выходной сигнал второго сумматора 1 и пройдя через третий умножитель 7, вызывает уменьшение выходного сигнала второго интегратора 18, который суммируется в пятом сумматоре 37 с входным сигналом второго интегратора 8, прошедшим через шестой умножитель Зб, Вследствие этого коэффициент передачи Опервого умножителя 2 по первому входу уменьшается до тех пор, пока ошибка на выходе четвертого сумматора 15 не становится равной нулю, а коэффициент передачи по...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1254433
Опубликовано: 30.08.1986
Автор: Брусов
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...сигнала БЯ) в состоянии квазистатики объекта 4 характеризует несоответствие величины управляющего воздействия ХИ) величине основного контролируемого возмущения Х(Ф) и текущим условиям функционирования,Константа С, является предельно допустимой мерой этого несоответствия, Практически величина С, и, следова тельно, логический блок 13 нужны для того, чтобы не производить самонастройку корректирующего фильтра 3 в том случае, когда выходной сиг-, нал регулятора 8 равен нулю или на ходится на уровне шумов. Самонастройка фильтра 3 повышает качество компенсации возмущения, и следовательно, всей системы в целом, так как часть возмущений, которая до25 этого проходила через объект, увеличивала дисперсию выходной координаты и нагружала...
Самонастраивающаяся следящая система с бесконтактным двигателем постоянного тока

Номер патента: 1259212
Опубликовано: 23.09.1986
Автор: Филаретов
МПК: G05B 13/02
Метки: бесконтактным, двигателем, постоянного, самонастраивающаяся, следящая
...- сопят.Из выражения (2) видно, что параметры передаточной функции И(р) являются постоянными, не зависящимиот переменных параметров моментаинерции нагрузки.5Так как величина 1 в выражении(1) янляется переменной, то дляполучения ныражения (2) необходимоподстраивать параметр 1 н последовательном корректирующем устройствепод соответствующее текущее значение,В известном устройстве для формирования последовательной коррек 5ции использовался сигнал тока проВтекйюь,его в якорной цели двигателя,Этот сигнал пропорционален моменту,развиваемому двигателем, Однакопри, использовании н качестве исполнительного элемента бесконтактногоОдвигателя постоянного тока это сделать не удается ввиду особенностейэтого двигателя. В результате необходима...
Самонастраивающаяся система управления
Номер патента: 1264139
Опубликовано: 15.10.1986
Авторы: Гуляев, Дорух, Ермоленко
МПК: G05B 13/02
Метки: самонастраивающаяся
...собой набор умножителей, где осуществляется умножение сигналов с выходов объекта 1 управления на постоянные коэффициенты. Сигналы с выходов блока 2 поступают на соответствующие входы блока 3, где складываются. Суммарный сигнал с выхода блока 3поступает на оба входа первого умножителя 4, на вторые входы умножителей 6 и 9и на вход блока 8. В умножителе 4 выходной сигнал блока 3 возводится в квадрат,результат интегрируется в интеграторе 5, арезультат интегрирования перемножается свыходным сигналом блока 3 и через блок 7поступает на управляющий вход объекта 1регулирования.Сигнал с выхода блока 8 через время,равное времени запаздывания, поступает напервый вход умножителя 9 и на второй входумножителя 11. В умножителе 9...
Самонастраивающаяся система управления
Номер патента: 1277065
Опубликовано: 15.12.1986
Авторы: Егоров, Кобзев, Назаров, Новикова
МПК: G05B 13/00
Метки: самонастраивающаяся
...придет в соответствие с увеличивающимся моментом нагрузки,При одновременном изменении момента нагрузки и момента инерции нагруз ки (этому случаю соответствует такжережим регулирования потока возбуждения двигателя при постоянном моменте)работа системы происходит аналогичноуказанному. При этом согласованная 20работа и правильное взаимодействиеконтура оценки суммарного моментаинерции двигателя, образованногоблоками 10-13, 14-16 и 18, и контура оценки тока нагрузки, включающего блоки 10, 11, 14-17, обеспечивается соответствующим выбором их контурных коэффициентов усиления.В статическом равновесном состоянии, характеризующимся тем, что скорость о и ускорение о вала двигателя равны нулю, а момент, разви,ваемый двигателем М, меньше момента...
Самонастраивающаяся система управления
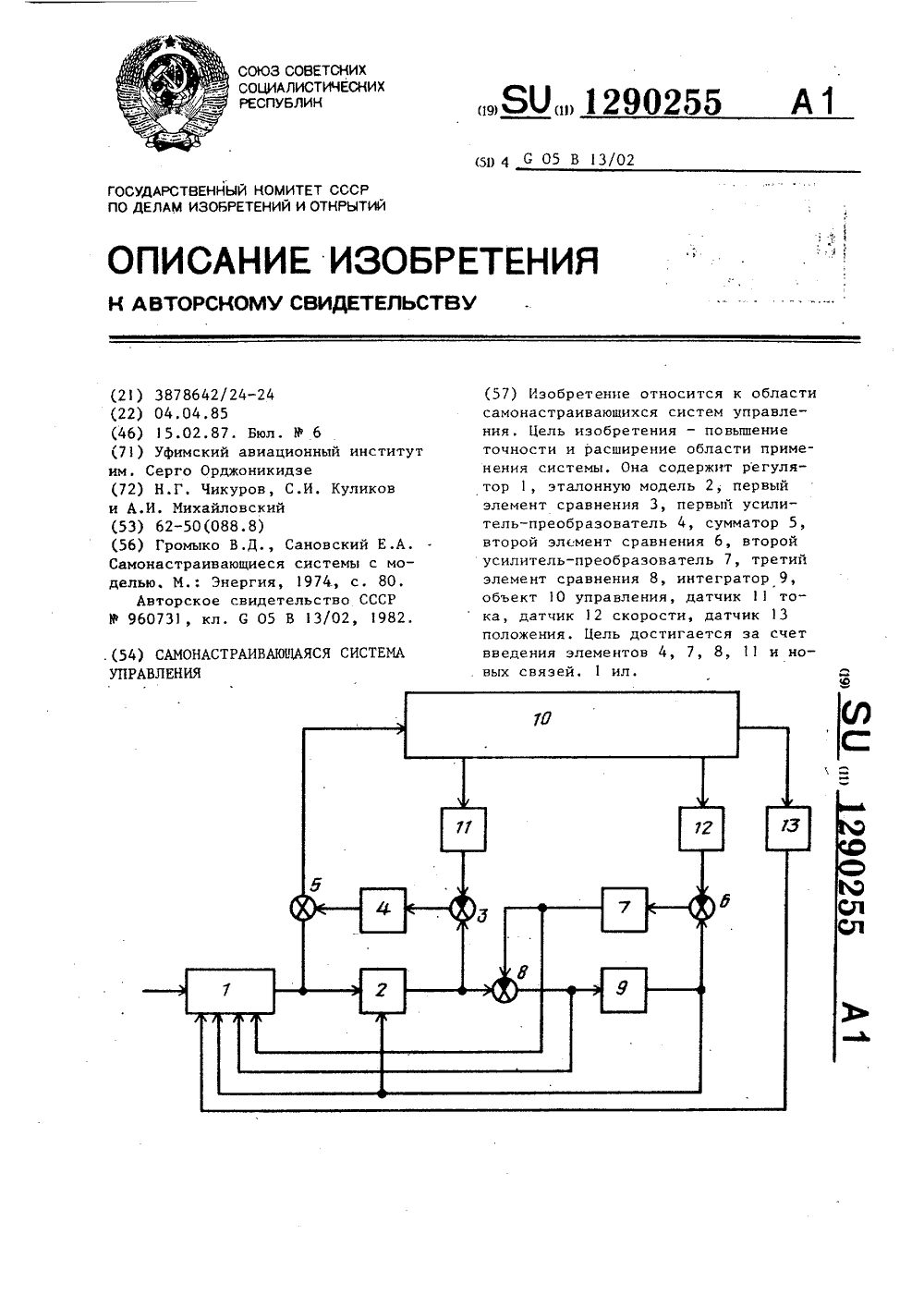
Номер патента: 1290255
Опубликовано: 15.02.1987
Авторы: Куликов, Михайловский, Чикуров
МПК: G05B 13/02
Метки: самонастраивающаяся
...выполня ется с помощью третьего элемента сравнения 8. Сигнал на его выходе пропорционален второй производной выходной координаты объекта управления. Сигнал с выхода интегратора 9, пропорциональный первой производной выходной координаты, сравнивается с помощью второго элемента сравнения 6 с фактическим значением скорости объекта управления 10. Действие нагрузки М на объект управления приводит к появлению на выходе второго элемента сравнения 6 сигнала ошибки, который через второй усилитель-преобразователь 7 поступает на первый вход третьего элемента сравнения 8 и восстанавливает соответствие между скоростью объекта управления и ее оценкой на выходе интегратора. Поскольку значение тока в якорной цепи электродвигателя задано с помощью...
Самонастраивающаяся система управления

Номер патента: 1300412
Опубликовано: 30.03.1987
Автор: Орещенко
МПК: G05B 13/02
Метки: самонастраивающаяся
...элемента 3 1 вызывает немедленную реакцию элемента 3 1 на сигнал, поступающий на его пер вый вход.Иножительно-делительный блок 38 обеспечивает на своем выходе величину, обратную произведению сигналов, поступающих на его входы. Выходной сигнал множительно-делительного блока пропорционален величине 1ТБ 3)30Выходной сигнал первого функционального преобразователя 39 пропорци%онален величине зп-.2Выходной сигнал второго Функционального преобразователя 40 пропорционален величине сов(- - -) .в 2Выходной сигнал источника 41 сиг/ нала пропорционален величине - .ШКомпаратор 42 обеспечивает на своем выходе сигнал в промежутках времени, когда оба сигнала на его входах45 имеют нулевые значения.Блок 43 измерения длительности импульса тока...
Самонастраивающаяся система программного управления
Номер патента: 1302240
Опубликовано: 07.04.1987
Автор: Рачков
МПК: G05B 19/16
Метки: программного, самонастраивающаяся
...сдвига фаз входных напряжений, т,е, от сигналов с одного из датчиков 15 перемещений и датчика 40 обратной связи.Усилитель 20 является усилителем постоянного тока, служащим дляусиления выходного сигнала Фазового дискриминатора 18. Величина сдвига фаэ 30 определяет скорость вращения привода 2 подач, а направление сдвига Фаз определяет направление вращения привода 2 подач.Обратная связь с привода подач 2 35 осуществляется по Фазе управляющего сигнала.На первый вход фазового дискриминатора 18 с усилителя 17 поступает рабочий сигнал П з 1 п(ы+Ч). Фаза ра-, 40 бочего сигнала определяет закон ьзменений управляемой координаты.На второй вход фазового дискриминатора 18 поступает через усилитель 19 сигнал обратной связи П соз(ыс+ М), 45 где Ю- Фаза...
Самонастраивающаяся система управления для объектов с запаздыванием

Номер патента: 1305634
Опубликовано: 23.04.1987
Авторы: Као, Карлос, Нгуен, Пичугин, Рауль
МПК: G05B 13/02
Метки: запаздыванием, объектов, самонастраивающаяся
...5 производится параллельно перестройке параметров блока 5 коррекцииПри этом сохраняется соотношение14(р) = 1/Ы,(р).При использовании ПИ-закона регулирования оператор регулятора имеет вид:И .(р) = К (г.)--- - ) (2)ягде К - коэффициент передачи регулятора;Тц(г) - время изодрома регулятора.Алгоритм работы блока 13 оптимизации параметров регулятора 5 можно использовать, например, в виде(3)где И, А, Ь - соответственно заданное и действительное число перемен знака сигнала б на интервале времени (;К,(С), К (-2 ) - коэффициент передачи регулятора соответственно в текущий момент времени и в момент времени, предшествующий на времяТц(г.) - время изодрома регулятора в текущий момент времени;С С - коэффициенты, выбираемые для конкретного...
Самонастраивающаяся система управления
Номер патента: 1312524
Опубликовано: 23.05.1987
Авторы: Борцов, Егоров, Пашков, Черных, Юнгер
МПК: G05B 13/02
Метки: самонастраивающаяся
...2 регулирования, устройство 3 сравнения, модель 4, блок 5 релейных элементов, блок 6 фильтров, первый инвертор 7 и второй инвертор 8.Самонастраивающаяся система управления работает следующим образом.Задающий входной сигнал системы поступает на первый вход сумматора 1. С выхода сумматора 1 сигнал, равный отклонению регулируемой переменной на втором и третьем входах сумматора 1 от заданного значения входной переменной на первом входе, поступает на вход объекта 2 регулирования и вход модели 4. При совпадении динамических свойств объекта 2 регулирования и модели 4 сигналы, поступающие на первый и второй входы сравнивающего устройства 3, равны и поэтому сигнал с выхода сравнивающего устройства 3 равен нулю. При этом работает лишь контур из...
Самонастраивающаяся система автоматического цифрового управления ректификационной колонной

Номер патента: 1316689
Опубликовано: 15.06.1987
Авторы: Бидюк, Згуровский, Романенко
МПК: B01D 3/42
Метки: колонной, ректификационной, самонастраивающаяся, цифрового
...35 40 45 50 55 жения на четвертый групповой вход первого запоминающего устройства 15.Параметры оь ч, д, дон до йч, йоь 6, оцениваются в блоке 16 по рекуррентному методу наименьших квадратов в каждый период квантования как вектор Йь согласно алгоритму (2), (3), (4), (5) и (6).Таким образом, на каждом цикле настройки определяются коэффициенты ог, ;о;, Ро;, до;, йч, йо;, о;, по которым в цифровом регуляторе 6 вычисляется динамическая составляющая управляющего воздействия У На каждом цикле настройки в блоке 16 проверяется логическое условиелФ;=, 3% 1(в,выполнение которого фиксирует оптимальность настройки цифрового регулятора. При Ф; - х;".зО; (е настройка коэффициентов гоп, ь дь азоз, йь йо заканчивается.Принципиальная схема технической...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1339494
Опубликовано: 23.09.1987
Авторы: Брусов, Крашенинников, Левичев, Сметанин, Сухарев
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...системы. Величинамодуля суммы сигналов У(С) и Е(С)в состоянии квазистатики объекта 7характеризует степень несоответствияуправляющего сигнала Х(г.) величине39494 3 5Цепи компенсатора совместно с замкнутым контуром управления (фиг. 3)включают в себя блоки 26, 27, 29 и30, Они являются основой компенсатора (фиг, 1 и 2), и в них выполняется 40 следующее: восстанавливается посредством блока 27 обратной модели входобъекта 7 из выходного сигнала объекта У(г.), определяется разность действительного Х(г) и восстановленно го Х(т) входов объекта посредствомсумматора 29. Полученный сигнал разности пропускается через блок 30 коррекции и суммируется с выходом регулятора с целью компенсации эквивалентного возмущения, приведенного к...
Самонастраивающаяся система управления

Номер патента: 1383293
Опубликовано: 23.03.1988
МПК: G05B 13/02
Метки: самонастраивающаяся
...) -Сх(хТ) (6) получаем выражение для параметра40ДС(3) известен.45Закон управления выбираем в виде Для модели движения (3) закон (8) обеспечивает утойчивое отображенное движение в случае соответствия динамики реального объекта управления выбранному виду индикаторного отоб 55 ражения.Самонастраивающаяся система работает следующим образом (фиг. 1),Блок 5 измерителей определяет текущие фазовые координаты объекта 4 и подает их на вход блока 6 сравнения, где они сравниваются с требуемыми конечными значениями, поступающими из задатчика 14, Разность х-х поступает на вход блока 7 формирования, где осуществляется их преобразование согласно выражению (2) в дискретные моменты С = 1 Т, задаваемые импульсами генератора 12, Значение С заносится на...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1386957
Опубликовано: 07.04.1988
Автор: Брусов
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...через ключ 22 и запоминается в блоке 23 памяти. При работесистемы все изменения величины х (С)в определенном соотношении, равномкоэффициенту передачи блока 7, отслеживаются величиной П(с). Такимобразом, корректирующий фильтр 7представляет собой пропорциональное звено с переменным коэффициентом передачи, который имеет. кусочно-постоянный характер,Блок 6 самонастройки работает следующим образом (фиг. 2),Блок 16 служит для определения момента самонастройки, В блоках 17-19проверяются условия квазистатики объекта управления, Операции, выполняемые в блоках 16 - 19, описываются соответственно формулами (3)-(6),П,(с)1 (3)Ь у(с) (С,; (4)(6) Сигнал П;(г.) представляет собой реакцию замкнутого контура системы 5 на действие всех видов...
Самонастраивающаяся система комбинированного регулирования

Номер патента: 1388826
Опубликовано: 15.04.1988
Авторы: Брусов, Сметанин, Сухарев
МПК: G05B 13/00
Метки: комбинированного, самонастраивающаяся
...25 умножения, в котором формируется выходной сигнал 11(й) разомкнутого контура. Таким образом, выходной сигналдатчика 8 умножается в блоке 10 нанекоторую величину (коэффициент передачи блока 10), которая между актами самонастройки корректирующегофильтра 10 является величиной пос138882 тоянной и хранится в блоке 24. При самонастройке блока 10 коэффициент передачи его изменяется скачкообразно,так как при наступлении состояния кназистатики новое отношение входных5 сигналов делителя 22, пропорционально текущему соотношению дозировок реагента и сырья, пропускается через ключ 23 и запоминается в первом бло О ке 24 памяти. При работе системы все изменения величины Х(Г) будут в определенном соотношении, равном коэффициенту передачи блока 1 О,...
Самонастраивающаяся система активного контроля размеров и режима обработки деталей при врезном шлифовании

Номер патента: 1391862
Опубликовано: 30.04.1988
Авторы: Михелькевич, Решетов, Шелеметьев
МПК: B24B 51/00
Метки: активного, врезном, размеров, режима, самонастраивающаяся, шлифовании
...с черновой обработки на чистовую, С этого момента осуществляется второй этап самонастройки скорости подачи суппорта 13 в соответствии с заданной программой Чм(Б) изменения скорости съема металла на участке съема припуска от Я до Б = О.Для формирования программы изменения скорости припуска напряжение с выхода вторичного преобразователя 3 подается на последовательно соединен ные усилитель 6 и задатчик 10 скорости съема припуска. Напряжение на выходе усилителя 6 изменяется по закону Б = К 68, где К - коэффициент передачи усилителя 6, при этом за датчик 10 на участке съема припускаот Я до Б = 0 Формирует участок программы Чм(Б) в виде напряжения 11 о (8) фЗадатчик 10 скорости съема при пуска формирует также следующий участок, так что...
Самонастраивающаяся система управления поперечной подачей шлифовального станка

Номер патента: 1397262
Опубликовано: 23.05.1988
Авторы: Кузьмичев, Михелькевич, Плицын, Решетов, Шелеметьев
МПК: B24B 49/00, B24B 51/00
Метки: подачей, поперечной, самонастраивающаяся, станка, шлифовального
...управления, которое управляет и синхронизирует работу. В качестве синхронизирующего сигнала в данном устройстве используется сигнал с выхода нул ь-о р гана 4.Так как синхронизирующий сигнал является вспомогательным, на блок-схеме (фиг. 1) отсутствует соединение между нуль-органом 4 и вычислительным блоком 9, по которому поступает указанный сигнал.На вход вычислительносо блока 9 (фиг. 3) с 1 оступают сигналы.Вс - скорость снятия ,с 1 рипуска, измеренная в конце этапа черновой подачи (т, 23 фазовой траектории); 7 д - скорость снятия припуска, измеренная в конце этапа чистовой подачи (т. 24 фазовой траектории); 7, - скорость снятия припуска в конце этапа выхаживания (т. 25 фазовой траектории); (, - интервал времени, затрачиваемый на съем...
Самонастраивающаяся система управления рабочим циклом поперечной подачи при врезном шлифовании

Номер патента: 1414593
Опубликовано: 07.08.1988
Авторы: Кузьмичев, Михелькевич, Решетов, Федосеев, Шелеметьев
МПК: B24B 51/00
Метки: врезном, подачи, поперечной, рабочим, самонастраивающаяся, циклом, шлифовании
...и, более того, скорость съема металла на участке чистового шлифования может превысить допустимую по условиям изменения микроструктуры металла - прижогов (участок 37-38) и по этому показателю деталь может оказаться в неисправном браке.Чтобы избежать брака и разброса по шероховатости в условиях изменения постоянной времени Т из-за иэоу менения режущей способности круга или жесткости упругой системьг шлифовального станка, автоматически производят переключение рабочего цикла с этапа черновой подачи на чистовую, с чистовой подачи на выхаживание, В частности, для рассматриваемой ситуации ухудшения режущей способности круга оба этих припуска увеличивают пропорционально текущему значению Ти они соответственно составляют (фиг.2) значения 5 у и...
Самонастраивающаяся система управления
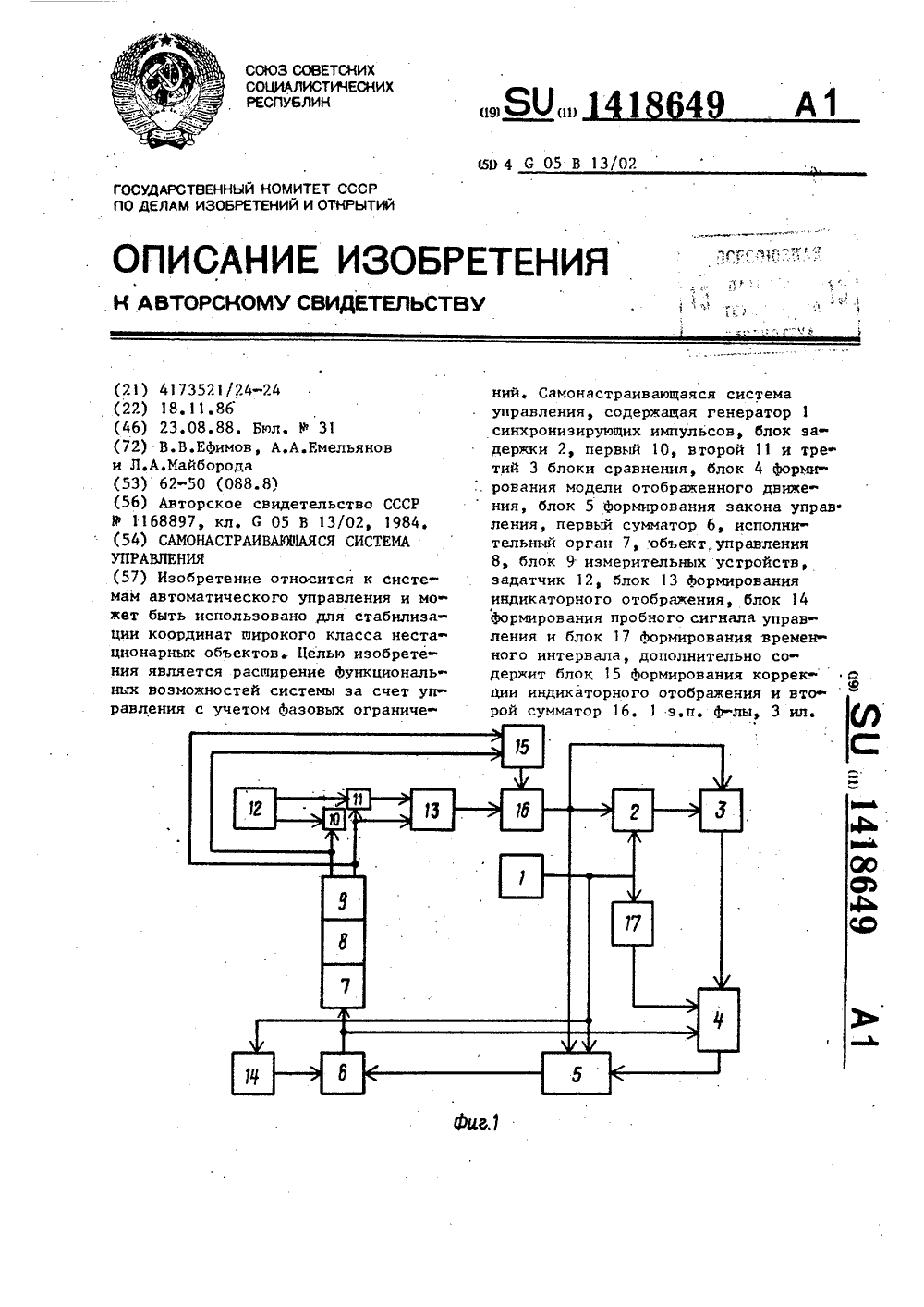
Номер патента: 1418649
Опубликовано: 23.08.1988
Авторы: Емельянов, Ефимов, Майборода
МПК: G05B 13/02
Метки: самонастраивающаяся
..., )+ (х, - ххода сумматора 23 поступает на блок 24, где производится извлечение квадратного корня, Полученный сигнал 4 О с выхода блока 24 следует на первый вход блока 25 и второй вход блока 30 на первый вход которого с выхода, сумматора 29 поступает результат сложения хранящихся в блоке 18 конс таитвеличин К и У . Блок 30.осущест-вляет Ьормирование разности сигналов 1(х -х + (х- х) . (К+ 9 поступающей затем на релейный эле- бО мент 31, Поступивший на первый вход блока 25 результат извлечения квадратного корня сравнивается со значением К, поступающим с третьего выхода блока 18 констант. Затем результат сравнения поступает на блок26 деления, на второй вход которого с блока 18 поступает сигнал Я, в результате чего на выходе делителя Лор...
Самонастраивающаяся система управления

Номер патента: 1425600
Опубликовано: 23.09.1988
МПК: G05B 13/02
Метки: самонастраивающаяся
...где складываются.Сигнал 8, у с выхода первого блока 5суьпчирования поступает яа первый входтретьего блока 7 суммирования. Сигна"лы у,(с-)у,(1-,)с выходов блока 3 запаздывания через время, равное времени запаздывания поступаютяа соответствующие входы второгоблока А задания коэффициентов, гдепроисходит умножение сигнала у,(1:-)(.:=1,щ)с х-го выхода блока 3 за"пяздываяия на постояяжи коэфициеятСигналы 8 у И-) ;В у,(И"- ь) с выходов второго блока ц задания коэффициентов поступают на соответствующие входы второго бпока 655суммирования где складываются. Сигнал я ( с) с выхода второго блокг 6 суммирования поступает на второй вход третьего блока 7 суммирования, где складывается с сигналому, поступающим с выхода первого блока 5...
Цифровая самонастраивающаяся следящая система

Номер патента: 1425601
Опубликовано: 23.09.1988
Авторы: Лебедев, Морщихин, Шароватов
МПК: G05B 13/02
Метки: самонастраивающаяся, следящая, цифровая
...модели 20 Ущ(п) поступают, соответственно, на второй и первый входы первогосумматора 1, на котором вычисляетсяих динамическое рассогласование (невязка) 9 (п) = У (и) - У(п) .При отклонении параметров элементов системы от исходных значений сигнал динамического рассогласования отличен от нуля, что инициирует работу блока 12 управления реверсивным счетчиком, который анализирует знак величины где В8, 6- максимальное, минимальное и амплитудное значение невязки на интервале собственных колебаний системы.Алгоритм настройки несущей частоты напряжения питания двухфазного асинхронного двигателя определяется рекуррентным соотношением Е(п+1) = Г(п)+ьГ вЦп К где и - номер шага настройки частоты; Ь Г - шаг настройки частоты, выбираемый из условия...
Самонастраивающаяся система с приводом на муфтах

Номер патента: 1444712
Опубликовано: 15.12.1988
Авторы: Благодарный, Борцов, Второв, Зеленков, Невесенко, Поляхов, Путов, Яковлев
МПК: G05B 13/02
Метки: муфтах, приводом, самонастраивающаяся
...11 по второму вхо - 20 ду ошибка между выходными сигналами блоков 13 и 8 всегда близка к нули.Следовательно, выходной сигнал интегратора 13, янляищегося моделью механической части приводя, отслеживает 25 значение скорости привода, а это означает, что выходной сигнал блока умножения 12 пропорционален моменту, передаваемому приводом.В начале разгона привод работает З 0 при больших значениях тока, поэтому нелинейные элементы 2 б и 27 входят в ограничение, т.е. на их выходах формируются постоянные сигналы, амплитуды которых олределяится параметрами35 ограничительных элементов 16 и 18, Эти параметры выбираются таким образом, чтобы отношение уровней ограничения усилителей 17 и 15 было равно примерному значению коэффициента переда чи блока...
Самонастраивающаяся система управления
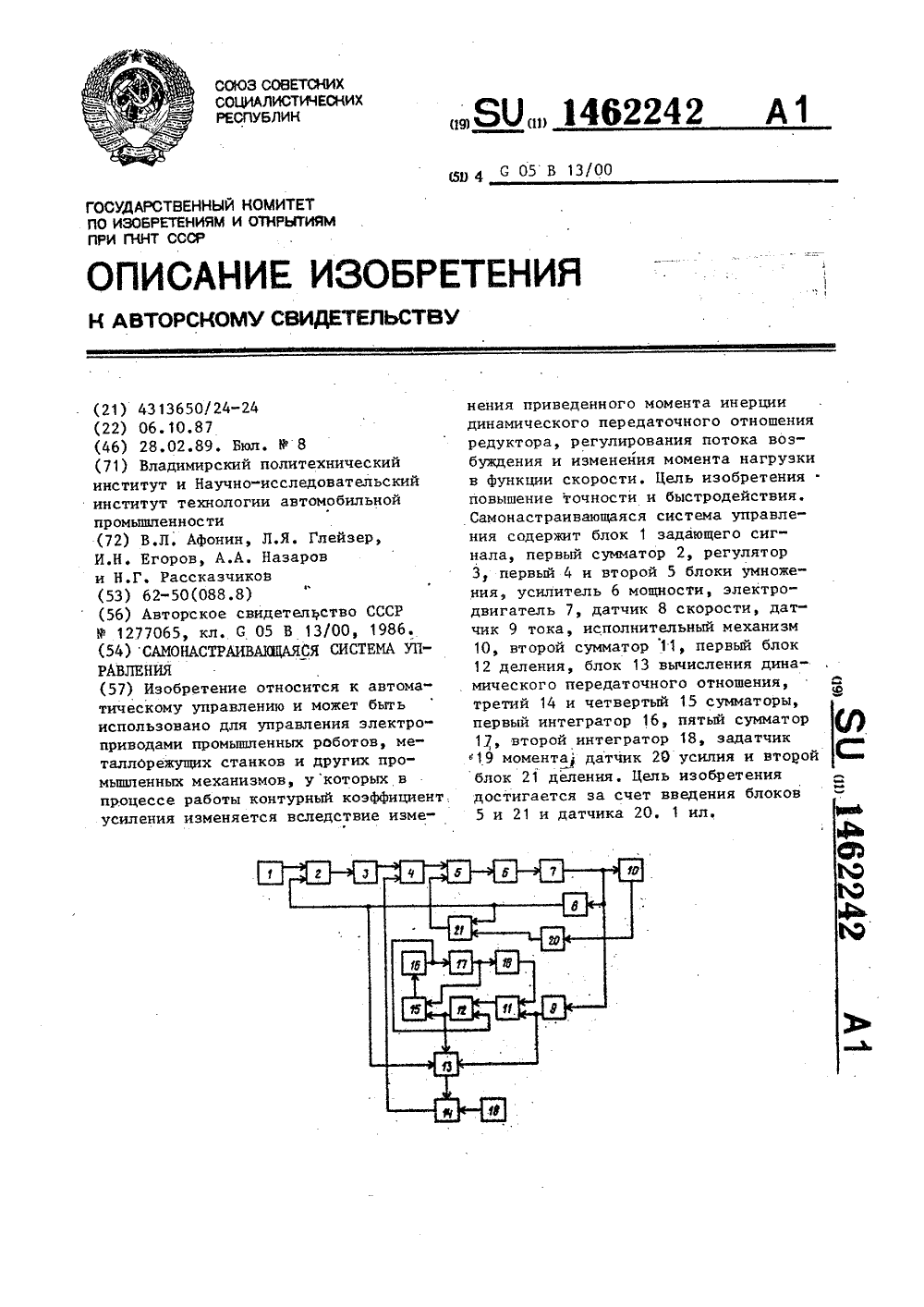
Номер патента: 1462242
Опубликовано: 28.02.1989
Авторы: Афонин, Глейзер, Егоров, Назаров, Рассказчиков
МПК: G05B 13/00
Метки: самонастраивающаяся
...15. Так будет происходить до тех пор, пока сигнал на выходе сумматора 15 не станет равным ускорению выходного вала редуктора, а сигнал на выходе блока.деления 12 - моменту инерции нагрузки, Далее этот сигнал через блок 13 поступает на вход третьего сумматора 14, на второй вход которого подается сигнал пропорциональный моменту инерции двигателя с выхода задатчика 19. На выходе сумматора 14 Формируется сигнал, пропорциональный суммарному моменту инерции, приведенному к валу двигателя. Этот сигнал в блоке 4 умножается на сигнал, поступающий с выхода регулятора 3, В .результате получаем эффект увеличения общего коэффициента передачи регулятора 3 и блока 4 на. величину, пропорциональную уменьшению коэффициента передачи двигателя, и...
Самонастраивающаяся система регулирования скорости

Номер патента: 1462243
Опубликовано: 28.02.1989
МПК: G05B 13/02
Метки: самонастраивающаяся, скорости
...ключ 12 подается на вход сумматора 17. Причем в зависимости от выходного сигнала элемента ИСКЛ 10 ЧА 10- ЩЕЕ ИЛИ 15 ключ 12 может быть замкнут или разомкнут и сигнал по производной может или не может поступать на вход регулятора тока как положительная параллельная связь. При несоответствии заданной динамической характеристики системы (сигнал на выходе модели 9 системы) и динамической характеристики системы (сигнал на выходе датчика 23 скорости вращения) появляется ошибка регулирования на выходе сумматора 1, Причем в зависимости от знаков ошибки регулирования (сигнал на выходе сумматора 1) и выходного сигнала эталонной модели 9 происходят переключения кшоча 12. Компаратор 14 определяет знак эталонного задающего сиг" нала Когда эталонный...
Самонастраивающаяся система управления диаметром и влажностью жил на бумагомассных машинах

Номер патента: 1462275
Опубликовано: 28.02.1989
Автор: Кижаев
МПК: G05D 27/02
Метки: бумагомассных, влажностью, диаметром, жил, машинах, самонастраивающаяся
...1 таким образом чтобы компенсировать изменение характеристик объекта 2 по этому каналу управления.Таким образом, модель, блок деления и блок умножения обеспечивают в каждом канале эффект самонастройки. Аналогичные явления возникают и во втором канале регулирования, содержащем блок 6, объект 2, датчик 7 диаметра и числа изолируемых жил, регулятор 8 диаметра, вторую модель 15, блок 16 деления и блок 17 умножения. Компенсация контура регулирования диаметра на контур регулирования влажности осуществляется компенсатором 23, так как это влияние значительное и описывается квадратичной зависимостью. В третьем канале регулирования блок 21 прогно 40 1. Самонастраивающаяся система управления диаметром и. влажностью жил на бумагомассных машинах,...