Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
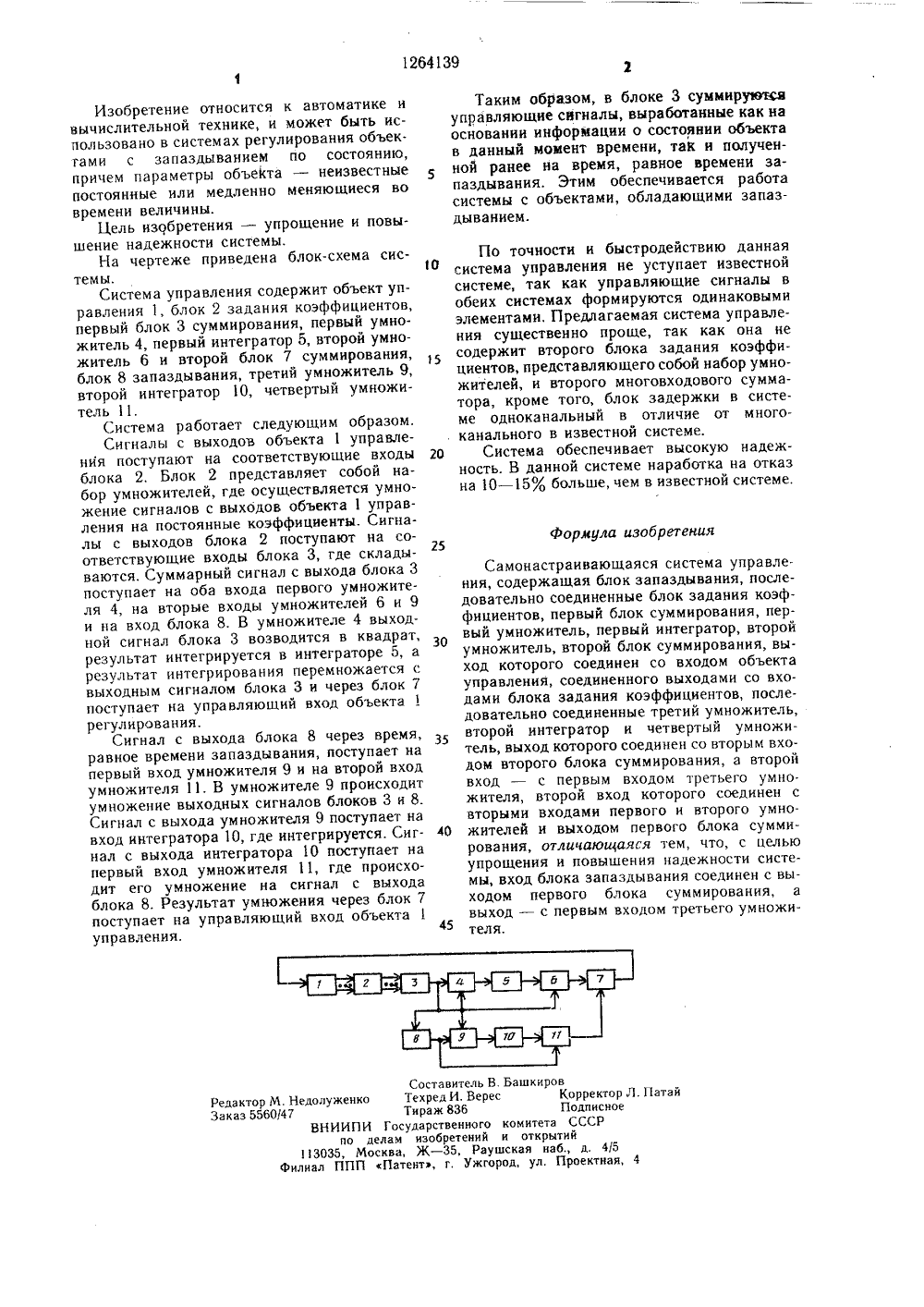
,IЦ ЕЛЬСТВУ еской ано в запазметры и медГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИЕН АВТОРСНОМУ СВИ(57) Изобретение относится к техникибернетике и может быть использосистемах регулирования объектами сдыванием по состоянию, причем параобъекта - неизвестные постоянные ил ленно меняющиеся во времени величины. Цель изобретения состоит в упрощении системы и повышении ее надежности. Система содержит замкНутые в кольцо объект управления, блок задания коэффициентов, первый блок суммирования, первый умножитель, первый интегратор, второй умножитель и второй блок суммирования и включенные последовательно между выходом первого блока суммирования и вторым входом второго блока суммирования блок запаздывания, третий умножитель, второй интегратор и четвертый умножнтель. Вторые входы первого, второго и третьего умножителей соединены с выходом первого блока суммирования, а второй вход четвертого умножитеая соединен с выходом блока запаздывания. 1 ил.1264139 1 О 15 20 формула изобретения 3035 40 45 Составитель В. Башкиров Редактор М. Недолуженко Техред И. Верес Корректор Л. Патаи Заказ 5560/47 Тираж 836 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб д. 4/5 Филиал ППП Патент, г. Ужгород, ул, Проектная, 4Изобретение относится к автоматике ивычислительной технике, и может быть использовано в системах регулирования объектами с запаздыванием по состоянию,причем параметры объеКта - неизвестныепостоянные или медленно меняющиеся вовремени величины.Цель изобретения - упрощение и повышение надежности системы.На чертеже приведена блок-схема системы.Система управления содержит объект управления 1, блок 2 задания коэффициентов,первый блок 3 суммирования, первый умножитель 4, первый интегратор 5, второй умножитель 6 и второй блок 7 суммирования,блок 8 запаздывания, третий умножитель 9,второй интегратор 10, четвертый умножитель 11,Система работает следующим образом.Сигналы с выходов объекта 1 управления поступают на соответствующие входыблока 2, Блок 2 представляет собой набор умножителей, где осуществляется умножение сигналов с выходов объекта 1 управления на постоянные коэффициенты. Сигналы с выходов блока 2 поступают на соответствующие входы блока 3, где складываются. Суммарный сигнал с выхода блока 3поступает на оба входа первого умножителя 4, на вторые входы умножителей 6 и 9и на вход блока 8. В умножителе 4 выходной сигнал блока 3 возводится в квадрат,результат интегрируется в интеграторе 5, арезультат интегрирования перемножается свыходным сигналом блока 3 и через блок 7поступает на управляющий вход объекта 1регулирования.Сигнал с выхода блока 8 через время,равное времени запаздывания, поступает напервый вход умножителя 9 и на второй входумножителя 11. В умножителе 9 происходитумножение выходных сигналов блоков 3 и 8.Сигнал с выхода умножителя 9 поступает навход интегратора 10, где интегрируется. Сигнал с выхода интегратора 10 поступает напервый вход умножителя 11, где происходит его умножение на сигнал с выходаблока 8. Результат умножения через блок 7поступает на управляющий вход объекта 1управления. Таким образом, в блоке 3 суммируека управляющие сигналы, выработанные как на основании информации о состоянии объекта в данный момент времени, так и полученной ранее на время, равное времени запаздывания, Этим обеспечивается работа системы с объектами, обладающими запаздыванием. По точности и быстродействию данная система управления не уступает известной системе, так как управляющие сигналы в обеих системах формируются одинаковыми элементами. Предлагаемая система управления существенно проще, так как она не содержит второго блока задания коэффициентов, представляющего собой набор умножителей, и второго многовходового сумматора, кроме того, блок задержки в системе одноканальный в отличие от многоканального в известной системе.Система обеспечивает высокую надежность. В данной системе наработка на отказ на 1 О - 15% больше, чем в известной системе,Самонастраивающаяся система управления, содержащая блок запаздывания, последовательно соединенные блок задания коэффициентов, первый блок суммирования, первый умножитель, первый интегратор, второй умножитель, второй блок суммирования, выход которого соединен со входом объекта управления, соединенного выходами со входами блока задания коэффициентов, последовательно соединенные третий умножитель, второй интегратор и четвертый умножитель, выход которого соединен со вторым входом второго блока суммирования, а второй вход - с первым входом третьего умно- жителя, второй вход которого соединен с вторыми входами первого и второго умножителей и выходом первого блока суммирования, отличающаяся тем, что, с целью упрощения и повышения надежности системы, вход блока запаздывания соединен с выходом первого блока суммирования, а выход - с первым входом третьего умножителя.
СмотретьЗаявка
3894283, 08.05.1985
ПРЕДПРИЯТИЕ ПЯ А-3565
ГУЛЯЕВ АНАТОЛИЙ НИКОЛАЕВИЧ, ДОРУХ ИГОРЬ ГЕОРГИЕВИЧ, ЕРМОЛЕНКО ПАВЕЛ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 15.10.1986
Код ссылки
<a href="https://patents.su/2-1264139-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для определения первой разности частотно импульсного сигнала

Номер патента: 1043675
Опубликовано: 23.09.1983
Авторы: Воронов, Качанов, Овчаренко
МПК: G06G 7/18
Метки: импульсного, первой, разности, сигнала, частотно
...входом блока управле;, 50ния и с частотными входами первогои третьего двоичных умножителей,выход первого двоичного умножителясоединен с частотным входом второгодвоичного умножителя, выход которого 55соединен с 5-входом Й 5-триггера и черед делитель частоты - с Р-входомР 5-триггера, прямой выход которого 15 4соединен. с управляющим входом ключа,1 инверсные разрядные выходы реверсивного счетчика соединены с соответствующими входами дискриминатора и через первую группу ключей - с первой группой входов группы элементов ИЛИ, прямые разрядные выходы реверсивного счетчика через вторую группу ключей соединены с второй группой входов группы элементов ИЛИ, группа выходов которой соединена с кодовым входом третьего двоичного умножителя, выход...
Устройство для вычисления логарифмических функций
Номер патента: 771672
Опубликовано: 15.10.1980
Авторы: Толокновский, Штейнберг
МПК: G06F 17/10
Метки: вычисления, логарифмических, функций
...состоят из счетчика 15, дешифратора 16, элемента ИЛИ 17,Предложенное устройство работает следующим 45образом.Коэффициент пересчета счетчика 3 аргументаустанавливается равным заданному значению аргумента, в регистр 5 сдвига записывается единица, а триггер 13 устанавливается в состояние,при котором сумматор 14 импульсов фиксиру.ется в режиме сложения. На управляющих вхо.дах двоичного умножителя 9 устанавливаетсяткод первого углового коэффициента корректи.рующей функцииПри подаче сигнала пуска на ключ 2 он от.пирается и счетные импульсы с выхода генера.тора 1 поступают на вход двоичных умножите.лей 4, 6 и 9, Устройство обрабатывает аппроксимирующую функцию на первомучастке. Приотработке каждого участка коррекции на входсчетчика 10...
Двухчастотный приемник тональных сигналов

Номер патента: 1538284
Опубликовано: 23.01.1990
МПК: H04Q 3/04
Метки: двухчастотный, приемник, сигналов, тональных
...следования М где И - коэффициент умножения. На вьгсоде первого Т-триггера 8 появляются прямоугольные импульсы с частотой .с( а= 2 Е и скважностью, равной двум, 1которые поступают на вход 0 первого 0-триггера 10 и вход С второго 0- триггера 11, на вход 0 второго 0- триггера 11 и вход С первого 0-триггера 10 поступают прямоугольные импульсы с частотой Г , и скважностью, равной двум, с выхода второго Т-триггера 9.С инверсных выходов первого и второго элементов И 3 и 4 прямоугольные импульсы со скважностью, равной двум, поступают на входы "Сброс" первого и второго двоичньгс счетчиков 5 и 6 соответственно.При этом частота следования им- пульсов где Го - граничная частота опознавания, определяемая в отсутствии умножения частоты Г по...
Устройство для контроля электрическихсоединений

Номер патента: 419855
Опубликовано: 15.03.1974
Автор: Ровинский
МПК: G05B 23/02
Метки: электрическихсоединений
...5 она сработает и закроет первый коммута-ор 3, запишет 1 в че 1 вертую запоминающую ячейку 9 и выдаст сигнал на запись в блок памяти 10.Появляющийся на втором выходе генератора импульсов 15 сигнал, сдвинутый на половину периода повторения относительно сигнала на первом его выходе, списывает О в четвертую запоминающую ячейку 9 и последняя выдает команду па второй вход дешифратора 11 для перезаписи числа из дешифратора и печатающий блок 14 и записывает 1 во вторую запоминающую ячейку 7. Появляющийся задержанный синхроимпульс с выхода печатающего блока 14 записывает 1 в третью запоминающую ячейку 8 и списывает О во вторую запоминающую ячейку 7, которая запускает первуо схему задержки 12 и т. д,Если контакт проверяемого объекта, к...
Двухчастотный приемник тональных сигналов

Номер патента: 1133697
Опубликовано: 07.01.1985
МПК: H04Q 3/04
Метки: двухчастотный, приемник, сигналов, тональных
...блока, основные выходы первого и второго 2 -триггеровсоединены с первыми входами первогои второго элементов И соответственно, инверсный выход первого З -триггера соединен с вторым входом второгоэлемента И, а инверсный выход второго-триггера соединен с вторым входом первого элемента И, инверсный выход которого соединен с входом "Сброс" первого двоичного счетчика, выход которого соединен с первым входом элемента ИЛИ, выход которого соединен с вторыми входами первого и второго исполнительных блоков, инверс.ный выход второго элемента И соединен с входом "Сброс" второго двоичного 1 О счетчика, выход которого соединен с вторым входом элемента ИЛИ, второй выход блока задержки соединен с третьим входом первого исполнительного блока....
Предыдущий патент: Устройство управления выгрузкой накопителей
Следующий патент: Программное устройство управления
Случайный патент: Устройство для перевозки и монтажа длинномерных конструкций