Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
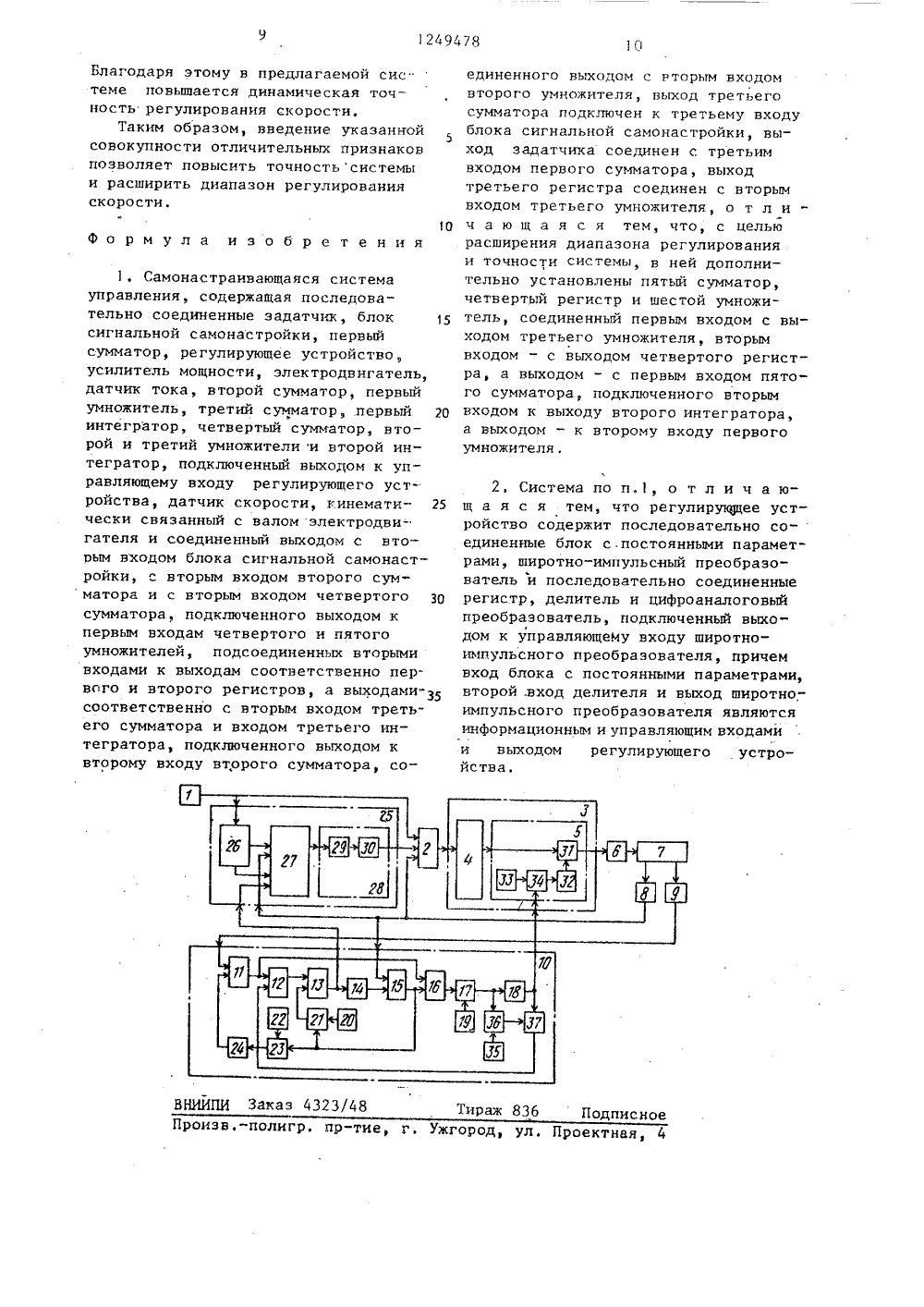
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК 13/02 ИЗОбРЕТЕНИЯ ПИС ВИДЕТЕЛЬСТ ВТОРСКОМ н юииств с ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Ленинградский ордена Лени а электротехнический институтим. В.И. Ульянова (Ленина)(56) Авторское свидетельство СССР Р 1158974, кл. С 05 В 13/02, 1983.Авторское свидетельство СССР У 962852, кл. С 05 В 13/04, 1980, (54) САИОНАСТРАИВАЮЦАЯСЯ СИСТЕМА УПРАВЛЕНИЯ(57) Изобретение относится к металлургической и металлообрабатывающей технике и-может найти применение в электроприводах роботов манипуляторов и металлорежущих станков, которые имеют неупругую связь между электродвигателями и исполнительным механизмом и к которым предъявляются высокие требования к стабильности их динамических характеристик при наличии больших параметрических возмущений. В системе решается задача обеспечения устойчивой отработки "ползучих" скоростей и компенсации больших параметрических возмущений. Сигнал задания поступает на вход эталлоной модели, формирующей эталонный сигнал регулируемой координаты и ее производной, Эти сигналы поступают на первый и второй входы блока масштабных коэффициентов, на третий вход которого поступает сигнал регулируемой координаты-скорос,БО 1249478 ти, а на четвертый - первый выходной сигнал устройства идентификации. Блок масштабных коэФфициентов формирует эталонные сигналы регулируемой координаты и ее производной в предположении, что данная система может быть представлена эквивалентной системой второго порядка, Его выходной сигнал через анализатор знака и регистр поступает на первый вход первого сумматора, где суммируется с сигналом резания и регулируемой координатой. Выходной сигнал .первого сумматора через блок с постояннь параметрами регулирующего устро" аП, ПИ, ПИД-блок) поступаетна сигнальный вход широтно-импульсного преобразователя, выходной сигнал которого усиливается по мощности и воз- С, действует на двигатель, На двигателе установлены датчик скорости (т.е. регулируемой координаты) и датчик тока. Их выходные сигналы подаются Я на входы устройства идентификации, которое определяет коэффициент передачи двигателя между скоростью и то- ком, Выходной сигнал этого устройства поступает на управляющий вход блока с переменными параметрами регулирующего устройства и в нем на вход "Делитель" делителя, на вход "Делимое" которого поступает сигнал регистра, Выходной сигнал делителя через цифроаналоговый преобразователь поступает на вход питания широтноимпульсного преобразователя, вызывая изменения параметров блока с переменными параметрами. 1 э,п,ф-лы, 1 ил.1 О 15 20 25 30 35 40 45 50 55 Изобретение относится к металлургической и металлообрабатывающей технике и может найти применение в электроприводах роботов-манипуляторов иметаллообрабатывающих станков, которые имеют неупругую связь между электродвигателем и исполнительным меха-.низмом и к которым предъявляются высокие требования к стабильности ихдинамических характеристик при наличии больших параметрических возмущений,Цель изобретения - расширение диапазона регулирования и точности системы,На чертеже представлена блок-схема системы,Система содержит задатчик 1, первый сумматор 2, регулирующее устройство 3, блок 4 с постоянными параметрами, блок 5 с переменными параметрами, усилитель 6 мощности, электродвигатель 7, датчик 8 скорости, датчик 9 тока, устройство 10 идентификации, второй сумматор 11, первыйумножитель 12, третий сумматор 3,первый интегратор 14, четвертый сумматор 15, второй 6 и третий 17 умножители, второй интегратор 8, тре-тий 19 и первый 20 регистры, четвертый умножитель 21, второй регистр 22,пятый умножитель 23, третий интегратор 24, блок 25 сигнальной самонаст"ройки, эталонная модель 26, блок 27масштабных коэффициентов, блок 28формирования сигнала самонастройки,анализатор 29 знака, пятый регистр30, широтно-импульсный преобразователь 31, цифроаналоговый преобразователь 32, шестой регистр 33, делитель 34, четвертый регистр 35, шестой умножитель 36 и пятый сумматор 37.Регулирующее устройство 3 содержит блок 4 с постоянными параметрамии блок 5 с переменными параметрами,состойщий из широтно-импульсногопреобразователя 31, цифроаналоговогопреобразователя 32, регистра 33 и делителя 34,Устройство 1 О идентификации содержит второй сумматор 11, первый умножитель 12, третий сумматор 13, первый интегратор 14, четвертый сумматор 15, второй 16 и третий 1 умножители, второй интегратор 18, третий19 и первый 20 регистр, четвертыйумножитель 21, второй регистр 22,пятый умножитель 23, третий интегратор 24, четвертый регистр 35, шестой умножитель 36 и пятый сумматор 37.Блок 25 сигнальной самонастройкисодержит эталонную модель 26, блок 27 масштабных коэффициентов и блок 28 формирования сигнала самонастройки, состоящий из анализатора 29 знака и регистра 30,Основной контур управления (скоростью двигателя) в системе образован задатчиком 1, первым сумматором 2, регулирующим устройством 3, усилителем 6 мощности и электродвигателем 7 с датчиком 8 скорости.устройство О идентификации предназначено для оценивания коэффициента передачи ток - скорость двигателя 7. В устройстве 1 О идентификациитретий интегратор 24 совместно свторым регистром 22 и пятым умножителем 23 осуществляют формирование сигнала, пропорционального току нагрузки (т.е. отношению момента нагрузки к потоку возбуждения двигателя 7), Первый умножитель 12 и первый интегратор 14, соединенные последовательно через третий сумматор 13, образуют настраиваемую модель двигателя 7, Поскольку на второй входсумматора 11 подаются как сигнал, пропорциональный току двигателя, снимаемый с датчика 9 тока, так и сигнал, пропорциональный току нагрузки, то на вход настраиваемой моделипоступает в виде оценки та же величина, что и реально действующая иа входе двигателя 7 (динамический ток), Это позволяет использовать получаемый на выходе четвертого сумматора 15 сигнал ошибки для настройкикоэффициента передачи модели (таккак эта ошибка обусловлена толькоразличием коэффициентов передачидвигателя 7 и модели) и, следовательно, для идентификации коэффициентапередачи двигателя 7, Оценка этогокоэффициента, вырабатываемая вторыминтегратором 18, подается на управляющий вход блока 5 с переменными па-.раметрами регулирующего блока 3,настраивая его коэффициент передачи(параметрическая самонастройка),Блок 25 сигнальной самонастройкиобеспечивает сигнальную самонастройку системы,Усилитель 6 мощности и электродвигатель 7 являются аналоговыми блока 1249478ми, датчик Я скорости и датчик 9 тока - аналого-цифровыми блоками, широтно-импульсный преобразователь 31и цифроаналоговый преобразователь 32 цифроаналоговыми блоками, а остальные 5блоки системы выполнены в цифровомвиде, Регистры 9, 20, 22, 29, 33и 35 весовых коэффициентов позволяютзадавать параметры системы (алгоритма управления) путем занесения в этирегистры соответствующих кодосигналов.Блок 27 масштабных,коэффипиентовсхемно может быть реализован например, с помощью шестого сумматора,15первый и второй входы которого являются соответственно первым и третьимвходами блока 27 масштабных коэффициентов, седьмого сумматора, первыйи второй входы которого являются со-.ответственно вторым и четвертым входами блока 27 масштабных коэффициентов, восьмого сумматора, выход которого служит выходом блока 27 масштабных коэффицентов, последовательно соединенных седьмого регистра и седьмого умножителя и последовательносоединенных восьмого регистра и восьмого умножителя, причем вторые входыседьмого и восьмого умножителей подключены к выходам соответственно шестого и седьмого сумматоров, а выходы - соответственно к первому и второму входам восьмого сумматора (непоказан)35Цифровая часть самонастраивающейся системы управления может быть выполнена на цифровых интегральныхмикросхемах серий 1802, 1804, 133,530, 533,572. Например, эталлоная домодель 26 может быть реализована ввиде цифрового фильтра на микросхе. -мах 133 ИП 4, 133 ТМ 5, 1 ЗЗТМ 7 и 13 ЗИМЗ;первый 14, второй 18 и третий 24 интеграторы - на микросхемах 133 Л 4,ЗЗТМ 5;первый 2, второй 11, третий13, четвертый 15 и пятый 37 сумматоры - на микросхемах 133 ИП 4, 133 ИМЗ;третий 19, первый 20, второй 22, пятый 30, шестой 33 и четвертый регистры 35 - на микросхемах 13 ЗТМ 5,133 ТМ 7; первый 12, второй 16, третий17, четвертый 21, пятый 23 и шестой36 умножители и делитель 34 - наарифметическом расширителе (умножите ле ) серии 1802, на микропроцессоре1804 ВС 1; блок 4 с постоянными параметрами регулирующего устройства 3 может быть реализован как цифровойП, ПИ- или ПИД- регулирук 1 щий блокна элементах серий 1802, 1804, 133и др,Самонастраивающаяся система управления скорость вращения электродвигателя с переменным приведенныммоментом инерции и регулируемым потоком возбуждения) работает следующим образом,Задатчик 1 вырабатывает последовательность цифровых выборок задающего аналогового сигнала ( цифровыхзадающих сигналов) . Этот сигнал че-.рез первый сумматор 2 и блок 4 спостоянными параметрами регулирующего устройства 3 поступает на широтно-импульсный преобразователь 31и после преобразования в аналоговуювеличину передается через усилитель6 мощности на электродвигатель 7,который благодаря совместному дейгствию регулирующего устройства 3 иотрицательной обратной свяи с выхода датчика 8 скорости на второйвход второго сумматора 2 развиваетскорость вращения, соответствующуюданному задающему сигналу. Настроечные параметры регулирующего устройства 3 выбраны таким образом, чтопри номинальном приведенном моментеинерции двигателя 7 и номанальномпотоке возбуждения динамические свойства системы (быстродействие и динамические ошибки . о управлению и возмущению ) удовлетворяют техническимтребованиям и считаются оптимальными,Предположим, что коэффициент передачи двигателя 7 между током искоростью изменяется, например уменьшается вследствие уменьшения потокавозбуждения или увеличения приведенного момента инерции, В этом случаево время переходного процесса, вызванного, например, увеличением цифрового задающего сигнала, выходнойцифровой сигнал датчика 9 тока, проходя через второй сумматор 11, первый умножитель 12, третий сумматор13, первый интегратор 14, вызываетизменение выходного сигнала первогоинтегратора 14, который вычитаетсяв четвертом сумматоре 15 из цифрового сигнала датчика 8 скорости. Навыходе четвертого сумматора 15 появляется отрицательный сигнал ошибки,Этот сигнал, будучи умножен во вто 1249478ром умножителе 6 на положительный выходной сигнал второго сумматора 1 и пройдя через третий умножитель 7, вызывает уменьшение выходного сигнала второго интегратора 18, который суммируется в пятом сумматоре 37 с входным сигналом второго интегратора 8, прошедшим через шестой умножитель Зб, Вследствие этого коэффициент передачи Опервого умножителя 2 по первому входу уменьшается до тех пор, пока ошибка на выходе четвертого сумматора 15 не становится равной нулю, а коэффициент передачи по первому вхо ду первого умножителя 12,т.е. выходной сигнал второго интегратора 18,не становится равным коэффициенту передачи двигателя 7, чем и обеспечивается его идентификация, Контур, образо ванный третьим сумматором 13, первым интегратором 14, четвертым сумматором 21 и первым регистром 20, обеспечивает затухание начальной ошибки, возникающей на выходе четвертого сум матора 15, Если переходный процесс в основном контуре системы характеризуется гораздо большими значениями тока, чем те, для которых рассчитаны параметры устройства 1 О идентифи кации, то в случае отсутствия четвертого регистра 35, шестого умножителя 36 и пятого сумматора 37 переходный процесс в устройстве 1 О идентификации приобретает ярко выраженный ко- ц лебательный характер вследствие сильного увеличения коэффициента контура, образованного первым умножителем 12, третьим сумматором 13, первым интегратором 14, четвертым суммато ром 5, вторым 16 и третьим 17 умно- жителями и вторым интегратором 18 (сигнал, пропорциональный току двигателя 7, подводится к этому контуру через датчик 9 тока и второй сум матор 11 мультипликативно в двух точках - в первом и во втором умножителях 12 и 16). напротив, введение укаэанных блоков стабилизирует скорость протекания и качество переходных процессов в устройстве 10 идентификации. Выходной сигнал датчика 9 тока, проходя через второй сумматор 11, первый умножитель 12, третий сумматор 13, первый интегратор 14, четвертый 55 сумматор 15, второй 16 и третий 17 умножители и второй интегратор 18, стремится сильно увеличить выходной сигнал второго интегратора 18 вырабатывающего оценку коэффициента передачи двигателя 7, Однако входной сигнал второго интегратора 18, проходя через шестой умножитель 36, который в отличие от второго интегратора 8 является безынерционным, и . далее через пятый сумматор 37, первьй умножитель 12, третий сумматор 3 и первый интегратор 14, резко увеличивает выходной сигнал первого интегратора 14, который, вычитаясь в четвертом сумматоре 15 из сигнала датчика 8 скорости, вызывает уменьшение выходного сигнала второго интегратора 18, обеспечивая, таким образом, стабилизацию системы.Цифровой сигнал с выхода второго интегратора 18 поступает на управляющий вход блока 5 с переменными параметрами регулирующего устройства 3, увеличивая (благодаря наличию делителя 34) коэффициент передачи регулирующего устройства 3 и компенсируя, таким образом, уменьшенИе коэффициента передачи двигателя 7, чем и достигается эффект параметрической самонастройки. Перестройка коэффициента передачи регулирующего устройства З.осуществляется с помощью цифроаналогового преобразователя 32, изменяющего, в соответствии со значением выходного сигнала делителя 34, напряжение питания широтно-импульсного преобразователя 31.Точная идентификация коэффициента передачи двигателя 7 оказывается возможной благодаря тому, что на входе настраиваемой модели двигателя, образованной вторым умножителем 12 и первым интегратором 14, формируется сигнал, пропорциональный динамическому току, Третий интегратор 24 осуществляет идентификацию составляющей тока, пропорциональной отношению момента нагрузки к потоку возбуждения двигателя 7, В случае увеличения момента нагрузки двигателя 7, скорость двигателя 7 начинает уменьшаться, а ток возрастать. Поскольку сигнал на выходе третьего интегратора 24 соответствует прежнему значению момента нагрузки, то выходной сигнал первого сумматора 11 перестает соответствовать динамическому току, воздействующему на двигатель 7. Выходной сигнал первого интегратора 14 увеличивается, 1249478а сигнал с выхода датчика 8 скорости уменьшается, Под действием возникающего на выходе .четвертого сумматора15 отрицательного сигнала ошибки выходной сигнал третьего интегратора24 (его знак отрицателен) начинаетвозрастать до тех пор, пока не придет в соответствие с новым значением 35 порядка, в связи с чем для обеспечения устойчивости процесса адаптациинеобходима информация только о производной регулируемой координаты), для чего из сигнала с первого выхода эталонной модели 26 вычитается выходной сигнал датчика 8 скорости, а из сигнала второго выхода эталонной модели 26 вычитается сигнал с выхода третьего сумматора 13. Сигналы разности усиливаются в соответствии с масштабными коэффициентами, а затем суммируются. Выходнойсигнал блока 27 масштабных коэффициентов подается на вход блока 28 фор 50 мирования сигнала самонастройки. Он реализует знаковую функцию (для чего входной сигнал в нем происходит.через анализатор 29 знака и регистр 30) и вырабатывает сигнал самонастройки, поступающий на первый входпервого сумматора 2, Построенная та 55 кпм образом система ликвидирует отклонения текущего значения скорости двимомента нагрузки двигателя 7, 10Блок 25 сигнальной самонастройки обеспечивает согласование динамики системы с динамикой эталонной моде- . ли 26 путем подачи на вход первого сумматора 2 дополнительного сигнала 15 самонастройки. Эталонная модель 26 настраивается, исходя из желаемого вида реакции системы на выходной, сигнал эадатчика 1. При параметрических возмущениях контур параметрической самонастройки вследствие своей инерционности вступает в действие не сразу, Напротив, блок 25 сигнальной самонастройки начинает немедленно ликвидировать ошибку между скоростью двигателя 7 и выходными сигналами эталонной модели 26.Блок 27 масштабных. коэффициентов формирует сигналы ошибок по скорости и ее производной 1 предполагается, что система с жесткой связью между двигателем 7 и исполнительным механизмом всегда может быть представлена эквивалентной системой второго гателя 7 от эталонного значения, сформированного эталонной моделью 26 вне зависимости от того, какими причинами эти отклонения вызваны; изменением параметров объекта (не показан), действием внешних возмущений нли исходными различиями динамических свойств объекта и эталонной модели 26, Блок 25 сигнальной самонастройки компенсирует изменение параме тров объек та в сравнительно узком диапазоне (до трех раз в обе стороны), в то время как основной контур самонастройки(параметрической) обеспечивает отработку параметрических возмущений в широком диапазоне (десятки раз).Благодаря включению в основной контур системы широтно-импульсного преобразователя 31 резко повышается точность системы при малых значениях задающего сигнала и расширяется диапазон регулирования скорости (в десятки раз и более). Разрядность выпускаемых цифроаналоговых преобразователей в лучшем случае 8-16, а обычно 8-12, что обеспечивает в случае, например, 12-разрядного цифроаналогового преобразователя 2 4900 уровней квантования выходного сигнала регулирующего устройства 3 в известной системе. При включении в основной контур регулирования широтно-импульсного преобразователя 31 появляется возможность увеличить число уровней квантования (во времени ) в десятки-сотни раз. Например, при значении шага дискретизации во времени 10 нс и максимальной длитель. ности импульса 100 мс широтно-импульсного преобразователя 31 получается 1 О млн значений управляющего сигнала, те. на три порядка больше, чем в известной системе. В этом случае при требуемом диапазоне регулирования скорости, например,10000:1 погрешность поддержания заданного значения скорости не превышает 0,1 Х.Введение в устройство 10 идентификации новых блоков с соответствующими связями позволяет стабилизировать процесс идентификации коэффициента передачи двигателя 7, исключив влияние на этот процесс среднего значения тока двигателя 7,и тем самым повысить точность настройки коэффициента регулирующего блока 3,12494/8 НИйПИ Заказ 4323/4 Тираж 83У писное ектная, 4 роизв,-полигр, пр-т жгород, ул Благодаря этому в предлагаемой системе повышается динамическая точность регулирования скорости,Таким образам, введение указанной совокупности отличительных признаков позволяет повысить точностьсистемы и расширить диапазон регулированияскорости.10Формула изобретения 1, Самонастраивающаяся система управления, содержащая последовательно соединенные задатчик, блок сигнальной самонастройки, первый сумматор, регулирующее устройство усилитель мощности, электродвигатель, датчик тока, второй сумматор, первый умножитель, третий сумматор, .первый 20 интегратор, четвертый сумматор, второй и третий умножители и второй интегратор, подключенный выходом к управляющему входу регулирующего устройства, датчик скорости, кинемати чески связанный с валом электродвигателя и соединенный выходом с вторым входом блока сигнальной самонастройки, с вторым входом второго сумматора и с вторым входом четвертого 30 сумматора, подключенного выходом к первым входам четвертого и пятого умножителей, подсоединенных вторыми входами к выходам соответственно пер. вого и второго регистров, а выходами-З 5 соответственно с вторым входом третьего сумматора и входом третьего интегратора, подключенного выходом к второму входу второго сумматора, соединенного выходом с вторым входомвторого умножителя, выход третьегосумматора подключен к третьему входублока сигнальной самонастройки, выход задатчика соединен с третьимвходом первого сумматора, выходтретьего регистра соединен с вторымвходом третьего умножителя, о т л и -ч а ю щ а я с я тем, что, с цельюрасширения диапазона регулированияи точности системы, в ней дополнительно установлены пятый сумматор,четвертый регистр и шестой умножитель, соединенный первым входом с выходом третьего умножителя, вторымвходом - с выходом четвертого регистра, а выходом - с первым входом пятого сумматора, подключенного вторымвходом к выходу второго интегратора,а выходом - к второму входу первогоумножителя,2, Система по п,1, о т л и ч а ющ а я с я тем, что регулирущрее устройство содержит последовательно соединенные блок с,постоянными параметрами, широтно-импульсный преобразователь и последовательно соединенные регистр, делитель и цифроаналоговый преобразователь, подключенный выходом к управляющему входу широтно- импульсного преобразователя, причем вход блока с постоянными параметрами, второй .вход делителя и выход широтно- импульсного преобразователя являются информационным и управляющим входами и выходом регулирующего устроиства.
СмотретьЗаявка
3837850, 03.01.1985
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ЭЛЕКТРОТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. В. И. УЛЬЯНОВАЛЕНИНА
БАБКИН ДМИТРИЙ ВЛАДИСЛАВОВИЧ, БОРЦОВ ЮРИЙ АНАТОЛЬЕВИЧ, ВТОРОВ ВИКТОР БОРИСОВИЧ, ГРИГОРЬЕВ РОДИОН ПЕТРОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 07.08.1986
Код ссылки
<a href="https://patents.su/6-1249478-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Блок формирования переноса сумматора

Номер патента: 1718214
Опубликовано: 07.03.1992
Автор: Павлова
МПК: G06F 7/50
Метки: блок, переноса, сумматора, формирования
...2 разряда 11 пропускает уровень сигнала логической единицы на выход 16 переноса разряда 11(С 1), а также на исток р-канально1718214 35 10 20 го транзистора 2 разряда 12, который закрыт уровнем сигнала логической единицы, поступающего на его затвор с выхода элемента ИЛИ - НЕ 19 разряда 12, на соответствующие входы которого поступают уровни сигналов логического нуля, уровень сигнала логической единицы на сток транзистора 2 разряда 1 г и на выход 17 переноса разряда 12 (Сг) не передается. Транзистор 2 разряда 1 э открыт уровнем сигнала логической единицы, поступающего с выхода элемента ИЛИ - НЕ 19 разряда 1 э, на входы которого поступают уровни сигналов логического нуля и логической единицы, открытый транзистор 2 разряда 1 э передает...
Устройство для определения гистограммы первой производной сигнала

Номер патента: 439818
Опубликовано: 15.08.1974
МПК: G06F 17/18
Метки: гистограммы, первой, производной, сигнала
...сигнала Р(о+Л 1) как существенное для следующего цикла анализа, а вычитающий счетчик 28 - код длительности окончившегося инЛЯтервала дискретизации . По связи 12ЛЯмин. блок АВД выдает импульс, означающий конец текущего интервала дискретизации. После этого блок АВД начинает следующий цикл анализа, осуществляя слежение в моменты времени 1 - 1 О=М+ЛЬ, , Л 1+сЛ 1 м 1 н за вторым из неравенств (3), а измеритель 27 измеряет текущее значение нового интервала дискретизации Л 1=сЛЬ . При выполнении этого неравенства в блоке АВД запоминается Г(Ы 1+Ы), в вычитающем счетчике 28 - кодЛ 12, вновь появляется импульс в связи Л 1 12 ит. д.В момент прихода импульса по связи 12 кодовый селектор 2 проводит сравнение кода, поступающего в этот момент по связи...
Устройство для контроля логических блоков

Номер патента: 1352624
Опубликовано: 15.11.1987
Авторы: Вилинский, Гроль, Журбенко, Иванов, Карачун, Романкевич, Старовойт
МПК: G06F 11/30
Метки: блоков, логических
...также подачу по заранее определенным контактам детерминированной испытательной последовательности.но существенно только при поступлении тактового сигнала, стробирующего занесение информации с "парафазных" входных контактов в объект контроля,Введение режима парафазности обеспечивает возможность проверки блоков, содержащих, например, тактируемые КБ-триггеры, для которых наличие одинаковых сигналов на К и Б-входах в момент снятия тактового сигнала приводит к неопределенному сосостоянию выхода триггера.Отработка режима парафазности происходит в два цикла. В первом цик. ле режима совпадения единичного признака псевдослучайности (ПС=1) по второму выходу блока 11 памяти и признака парафазности (ПФ = 1) по второму выходу блока 3 памяти приво....
Стенд для испытания блоков цилиндров двигателя внутреннего сгорания

Номер патента: 1620877
Опубликовано: 15.01.1991
Автор: Переяславский
МПК: G01M 13/00
Метки: блоков, внутреннего, двигателя, испытания, сгорания, стенд, цилиндров
...преобразователя, не оказывающую существенного сопротивления потоку рабочей жидкости,Форма импульсов давления определяется характеристикой сжимаемости рабочей жидкости и характером изменения5 10 20 25 Регулировка дросселей 12, 13 и клапанов 18, 20 с дистанционным пропорциональным управлением осуществляется электрическими сигналами управления, формируемыми второй частью электронного задающего блока 23, Устройствами ввода блоков 35 и 36 задаются требуемые значения максимального и минимального давления формируемых импульсов. На выходах этих блоков формируются сигналы в цифровом виде о величинах заданных давлений, каждый из которых подается на вход цифроаналогового преобразователя 69 соответствующего согласующего блока 43 и 44. С приходом...
Устройство для управления нажимнымивинтами

Номер патента: 829235
Опубликовано: 15.05.1981
Авторы: Краковецкий, Орещенко
МПК: B21B 37/00
Метки: нажимнымивинтами
...блоков 1, 2 двигателей с системами управления соединены со входами схемы 20 совпадения, первыйвход ключа 15 соединен с выходомнуль-органа 11, первый и второй входы которого соединены с выходамипервого датчика 9 нагрузки и первого источника 13 напряжений, первыйвход ключа 16 соединен с выходомнуль-органа 12, первый и второй входы которого соединены с выходамивторого датчика 10 нагрузки второгоисточника 14 напряжения.В статическом состоянии скоростидвигателей равны нулю, следовательно, на выходе схемы 20 совпаденияимеется сигнал, величина которогообеспечивает момент двигателя больше Мо, но меньше суммарного статического момента двигателя. И " величина статического момента двигателяопределяемая моментом сопротивленияучастка кинематической...
Предыдущий патент: Устройство для управления сварочным полуавтоматом
Следующий патент: Устройство для управления копировальным станком
Случайный патент: Теплосчетчик