Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
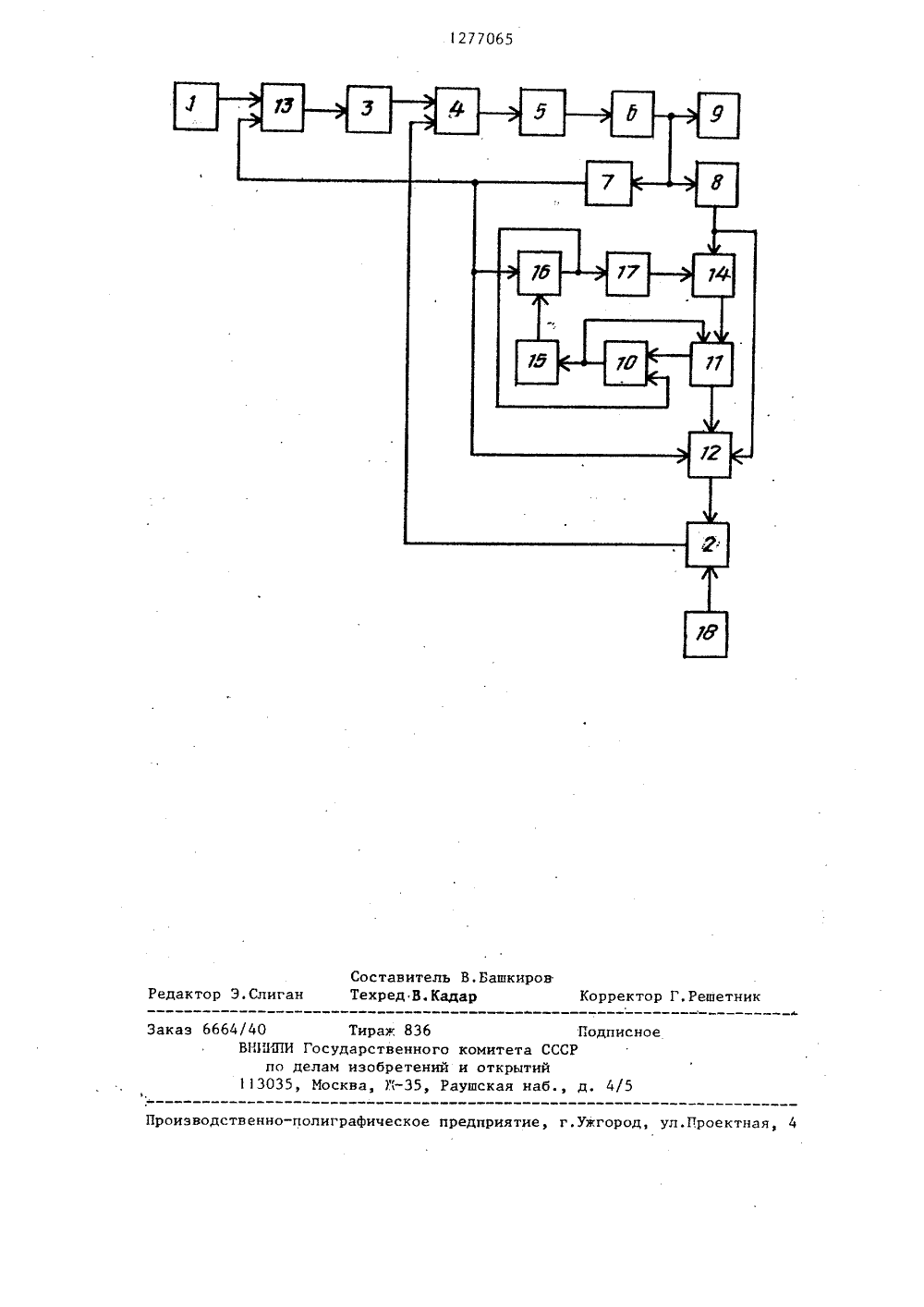
(50 4 С 05 В 13/00 ОПИСАНИЕ ИЗОБРЕТЕНИ ТЕЛЬС 1 ВУ ВТОРСКОМУ 3/24.-24 85 86. Бюлмирский В 46литехническ Наза горов, А.и Н.А.Но(54) САМОН УПРАВЛЕНИЯ (57) Изобр ислолнител гателями п изобретени быстродейс СТРАИВЙ 01 ЦАЯСЯ СИСТЕ етение касается управлени ьными электрическими двиромышпенных роботов. Цель я - повышение точности и твия системы при пониГОСУДАРСТВЕННЫЙ КОМИТЕТ ССС ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫ(прототип) женном энергопотреблении. Системасодержит блок задающего сигнала 1,первый сумматор 2, регулятор 3, блок4 деления, усилитель мощности 5,электрический двигатель 6, датчикискорости 7 и тока 8, необратимыйредуктор 9 и устройство идентификации переменного суммарного моментаинерции двигателя, состоящее из второго О, третьего 13, четвертого 14сумматоров, первого и второго интеграторов 15 и 17, блока 11 деления,логического устройства 12 и задатчика 18 момента инерции двигателя.В процессе работы блок самонастройки по сигналам, поступающим с датчи-.ков скорости 7 и тока 8 вырабатыва-.ет сигнал, пропорциональный суммарному моменту инерции двигателя 6,в функции которого осуществляется "коррекция коэффициента передачи регулятора 3.ил.ЭО Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления электроприводами промышленных роботов, у которых в процессе работы 5 контурный коэффициент усиления изменяется вследствие изменения приведенного момента инерции нагрузки, динамического передаточного отношения редуктора или регулирования потока возбуждения двигателя.Целью изобретения является повышение точностии быстродействия работы самонастраивающейся системы (СНС) управления электрическим двигателем при пониженном энергопотреблении системы.На чертеже приняты следующие обозначения: блок задающего сигнала 1, первый сумматор 2, регулятор 3, блок 4 умножения, усилитель 5 мощности, электрический двигатель 6, датчик 7 скорости, датчик 8 тока, необратимый редуктор 9, второй сумматор 10, блок 11 деления, логическое устрой 25 ство 12, третий 13, четвертый 14 сумматоры первый интегратор 15, пятый сумматор 16, второй интегратор 17, задатчик 18 момента инерции двигателя.Система работает следующим образом.Блок 1 вырабатывает задающий сиг.нал, который в сумматоре 2 сравнивается с сигналом отрицательной обратной связи по скорости, формирующимся с помощью датчика 7 скорости.В сумматоре 2 вырабатывается сигналошибки, который через регулятор 3,блок 4 умножения, и усилитель 5 мощ Оности передается на электрическийдвигатель 6, развивающий скоростьвращения, соответствующую задающему сигналу. Регулятор 3 настраивается таким образом, что при номинальном приведенном суммарном моментеинерции двигателя, номинальном потоке возбуждения и тяговом режиме работы необратимого редуктора динамические свойства системы .(быстродействие и динамические ошибки по управлению и возмущению) удовлетворяюттехническим требованиям и считаютсяоптимальными,Предположим, что момент нагрузки 55на выходном валу постоянен, а коэффициент передачи двигателя уменьшилсявследствие увеличения момента инерции нагрузки. Будем считать, что соотношение величин и знаков сигнала задания и момента нагрузки таковы, что в необратимом редукторе осуществляется тяговый режим, В этом случае во время переходного процесса, например, по управлению (сигнал задания увеличивается) выходной сигнал датчика 8 тока, проходя через блоки 10, 11, 14 и 15, вызывает изменение сигнала на выходе интегратора 15, который вычитается в сумматоре 16 из сигнала датчика 7 скорости, Разностный сигнал с выхода сумматора 16 поступает на второй вход сумматора 14, где складывается с сигналом, поступающим с блока 11 деления. В результате сигнал на выходе сумматора 14уменьшается. Вследствие этого увели-, чивается выходной сигнал блока 11 деления, пропорциональный частному от деления выходного сигнала сумматора 1 О на выходной сигнал сумматора 14. Так будет происхоцить до тех пор., пока сигнал на выходе четвертого сумматора 14 не станет равным ускорению выходного вала редуктора, а сигнал на выходе блока 11 деления - моменту инерции нагрузки. Далее этот сигнал через логическое устройство 12 поступает на вход третьего сумматора 13, на второй вход которого подается сигнал, пропорциональный моменту инерции двигателя с выхода за- датчика 18 момента инерции. На выходе сумматора 13 формируется сигнал, пропорциональный суммарному моменту инерции, приведенному к валу двигателя, этот сигнал в блоке 4 умножается на сигнал, поступающий с выхода регулятора 3, В результате получаем эффект увеличения общего коэффициента передачи регулятора 3 и блока 4 на величину, пропорциональную уменьшению коэффициента передачи двигателя, и стабилизации контурного коэффициента передачи всей системы в целом.Аналогично процесс происходит, если задающий сигнал уменьшается,При изменении момента нагрузки, например, при его увеличении, скорость двигателя уменьшается, а ток возрастает, Поскольку величина сигнала на выходе интегратора 17 соответствует прежнему (меньшему) значению момента нагрузки, то на первый вход блока 11 деления поступает сигнал, 2770650 уже несоответствующий динамическому току, воздействующему на двигатель. Выходной сигнал интегратора15 увеличивается (так как ток двигателя возрастает), в то время как сигнал датчика 7 скорости уменьшается,Под действием появившегося на выходе сумматора 16 отрицательного сигнала рассогласования выходной сигналинтегратора 17 (его знак отрицателен) увеличивается до тех пор, покане придет в соответствие с увеличивающимся моментом нагрузки,При одновременном изменении момента нагрузки и момента инерции нагруз ки (этому случаю соответствует такжережим регулирования потока возбуждения двигателя при постоянном моменте)работа системы происходит аналогичноуказанному. При этом согласованная 20работа и правильное взаимодействиеконтура оценки суммарного моментаинерции двигателя, образованногоблоками 10-13, 14-16 и 18, и контура оценки тока нагрузки, включающего блоки 10, 11, 14-17, обеспечивается соответствующим выбором их контурных коэффициентов усиления.В статическом равновесном состоянии, характеризующимся тем, что скорость о и ускорение о вала двигателя равны нулю, а момент, разви,ваемый двигателем М, меньше момента нагрузки М, необратимый редукторзаклинивается. Это объясняется тем,что под воздействием моментов, прикладываемых к выходным валам необратимых редукторов (моментов нагрузки),в самотормозящихся передачах этих редукторов создаются только моменты . 40трения в зацеплении, которые по сво -ей физической сущности не могут бытьдвижущими. В результате вал электрического двигателя в статических состояниях равновесия остается нЕпо. - 45движным при любых моментах нагрузки,действующих на выходной вал необратимого редуктора. Это обстоятельство позволяет отключать электродвигатель самонастраивающейся системы 50от источника энергии в статических .равновесных состояниях.Теперь рассмотрим случай, когдавследствие смены режима движенияизменяется динамическое передаточное 55отношение редуктора." определяется для необратимыхредукторов соотношением, - 1ахф при М 3 где, - КПД прямого и обратдх олного хода редуктора; о - скорость вала двига-,теля;М - момент в зацеплении,М= 1 сх +И, где 1 " момент инерции нагрузки; И - момент нагрузки; - кинематическое передаточное отношение редуктора;- ускорение вала двигателя.Чаще всего это происходит при реверсе, торможении или разгоне электродвигателя. Предположим, что в начальный момент времени соотношение величин и знаков сигнала задания и момента нагрузки таковы, что в необратимом редукторе осуществляется тяговый режим движения, т.е. произведение М б О. При этом в блоке 12 определяется произведение сигналов Уи У , соответственно поступающих на его первый и второй управляющие входы с выходов датчиков 7 и 8 скорости и тока, пропорциональных скорости вала двигателя с и моменту в зацеплении М . В блоке 12 при положительном знаке вновь сформированного сигнала устанавливается коэффициент передачи К пропорциональный динамическому передаточному отношению необратимого редуктора в тяговом режиме.При реверсе двигателя его скоростьнекоторое время сохраняет свой знак, в то время как знак момента в зацеплении изменяется на противоположный. Соответствующим образом изменяются и знаки сигналов датчиков скорости и тока двигателя. При этом происходит смена режиме движения необратимового редуктора с тягового на режим оттормаживания. Одновременно изменяется и динамическое передаточ,ное отношение редуктора. В этом, случае в блоке 12 изменяется знак сигнала, пропорциональный произведению сигналов, поступающих на первый и второй управляющие входы блока с выходов датчиков скорости и тока (М Ос О), поскольку знак сигнала на выходе датчика скорости сохраняет некоторое время свой знак, 1277065а знак сигнала датчика тока меняется на противоположный. В результате в блоке 12 по сигналу, пропорциональному произведению (О " х У, ), 5знак которого изменился йа противоположный, устанавливается коэффици"ент усиления - К , пропорциональныйдинамическому передаточному отношению редуктора в режиме оттормажива" г 0ния.При сиене режима оттормаживанияв редукторе при работе СНС натяговый в блоке идентификации моментаинерции происходят аналогичные процессы,Таким образом, вновь введенное вустройство идентификации переменногосуммарного момента инерции двигателялогическое устройство позволяет 20учесть нелинейные свойства необратимого редуктора, с помощью которогоулучшаются энергетические характеристики всей СНС, а использование блокаумножения вместо блока деления - 25уменьшить число интеграторов и блоков деления, используемых в идентификаторе переменного момента инерции,Все это позволяет повыситьточностьи быстродействие работы как устройства идентификации, так и всей системыв целом. формула изобретения35Самонастраивающаяся система унравпения, содержащая блок умножения, блок деления, первый интегратор, первый и второй сумматоры, последовательно соединенные блок за дающего сигнала, третий сумматор и регулятор, второй вход, третьего сум" матора соединен с выходом датчика скорости, вход которого соединен с входом датчика тока и выходом электродвигателя, вход которого соединен с выходом усилителя мощности, выход датчика тока соединен с входом чет- г вертого сумматора, второй вход которого соединен с выходом второго интегратора, о т л и ч а ю щ а я с я . тем, что, с целью повышения быстродействия и точности при пониженном энергопотреблении дополнительно введены необратимый редуктор, пятый сумматор, задатчик момента инерции двигателя и логическое устройство, первый управляющий вход которого соединен с выходом датчика скорости и входом пятого сумматора, выход которого соединен с входом второго интегратора, а второй вход - с выходом первого интегратора, вход которого соединен с . входом блока деления и выходом второго сум матора, первый вход которого соединен с выходом пятого сумматора, а второй вход - с выходом блока деления, второй вход которого соединен с выходом четвертого сумматора, вход которого соединен с вторым управляющим входом логического устройства, третий вход которого соединен с вы" ходом блока деления, а выход - с входом первого сумматора, второй .вход которого соединен с эадатчиком момента инерции двигателя, а выходс входом блока умножения, второй вход которого соединен с выходом регулятора, а выход - с входом усилителя мощности, выход электродвигателя соединен с входом необратимого редуктора.277065 Составитель В.БашкировТехред В Кадар Корректор Г Решетн лиган е акт 6 Заказ 6 Подписно ета СССытийъ доск роиэводственно-полиграфическое предприятие, г.ужгород, ул.Проектная/40ВНИИПИпо д113035,Тираж сударств ам изобр ного комитений и откр5, Раушская
СмотретьЗаявка
3896593, 13.05.1985
ВЛАДИМИРСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ЕГОРОВ ИГОРЬ НИКОЛАЕВИЧ, НАЗАРОВ АЛЕКСЕЙ АЛЕКСАНДРОВИЧ, КОБЗЕВ АЛЕКСАНДР АРХИПОВИЧ, НОВИКОВА НАТАЛЬЯ АЛЕКСАНДРОВНА
МПК / Метки
МПК: G05B 13/00
Метки: самонастраивающаяся
Опубликовано: 15.12.1986
Код ссылки
<a href="https://patents.su/5-1277065-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Устройство для регулирования момента нагрузки в упругой механической связи электропривода

Номер патента: 765960
Опубликовано: 23.09.1980
Автор: Ткаченко
МПК: H02P 5/06
Метки: механической, момента, нагрузки, связи, упругой, электропривода
...т.е. при нулевой ошибке регулирования этого момента нагрузки, оба дополнительных сигнала равны нулю.Благодаря параболической характеристике нелинейного элемента 11 его коэффициент усиления в зоне малых рассогласований момента нагрузки близок к нулю, вследствие чего близок к нулю и дополнительный сигнал, поступающий на регулятор момента нагрузки, который нри этом практически не изменяется в указанной зоне, что способствует плавной отработке малых ошибок регулирования момента нагрузкиУкаэанное построение устройства для регулирования момента нагрузки в упругой механической связи злектропривода обеспечивает быстрое 45 50 60 1025ЗО40 поаышает скорость уменьшения ошибки регулирования и благодаря чему также повышается динамическая...
Дифференциально-вакуумный автомат для изменения при разгоне двигателя внутреннего сгорания момента зажигания или перестановки заслонок подогрева воздуха

Номер патента: 75633
Опубликовано: 01.01.1949
Автор: Рубец
Метки: автомат, внутреннего, воздуха, двигателя, дифференциально-вакуумный, зажигания, заслонок, изменения, момента, перестановки, подогрева, разгоне, сгорания
...разгоне двигателя; на фиг. 3 - схема применения автомата для изменения момента зажигания.Диференциально-вакуумный автомат (фиг. 1) состоит из корпуса 1, мембраны 2 и штока 3 с калиброванным жиклером 4.Во время работы двигателя разрежение во всасывающей трубе двигателя передается по патрубку 7 в камеру б, а через канал 9 и б и жиклер 4 в камеру 5. При изменении режима работы двигателя изменение разрежения во всасывающей трубе передается в камеру 5. Мембрана 2 при этом прогибается, и вместе с ней перемещается шток 3, передающий усилия к приводам управляемого органа.При установлении режима работы двигателя разрежение в камере 5, благодаря наличию калиброванного жиклера 4, становится равным,раз 571режению в камере б и действие ав. томата...
Устройство для управления нагрузкой трансформаторной подстанции
Номер патента: 1473008
Опубликовано: 15.04.1989
Автор: Калентионок
МПК: H02J 13/00
Метки: нагрузкой, подстанции, трансформаторной
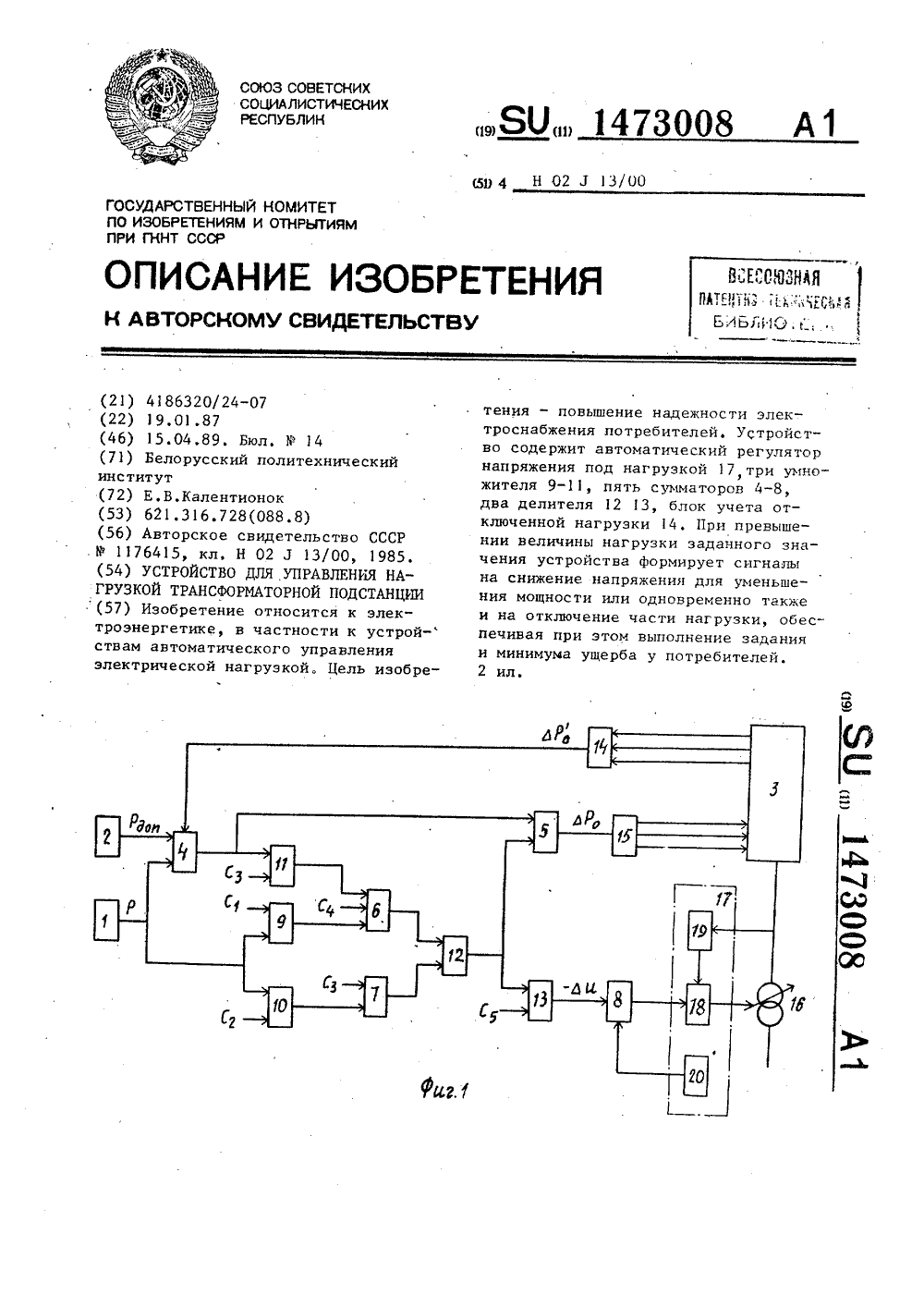
...(5) в (3), а формулы (4) и (5) в (2), минимизируя которое с учетом (7), находим оптимальную величину уменьшения нагрузки путем снижения напряжения1 О Таким образом, если активная мощность нагрузки в каком-либо режиме станет больше предельно допустимойвеличины Р ) Р то на выходе сумматора 4 появляется сигнал, пропорциональный возникшему дефициту мощности бР. Умножение этой величины на постоянный сигнал С в множителе 11, а затем суммирование полученной величины в сумматоре 6 с постоянным сигналом С,1 и сигналом, пропорциональным величине (-СР), дает сигнал, равный С 4 Съ ЬРАеФ-С 1 Р Деление данного сигнала в делйтеле 25 12 на величину С+С Р, полученную путем умножения С на Р в умножителе 10 и суммирование в сумматоре 7 с сигналом С ,...
Устройство для калибровки измерителей дальности до молниевых разрядов

Номер патента: 938235
Опубликовано: 23.06.1982
Авторы: Крохин, Семагин, Файзулин
МПК: G01W 1/18
Метки: дальности, измерителей, калибровки, молниевых, разрядов
...6-Ч СОВ 6 (д)Оой ЕЧйп 6нм образом, выражения (5)о,(7)в35 (8) о ределяют сигналы на выходах элекЗЭИЧЕСКОЙ И МаГНИТНЫХ аитэнно ОбУСЛОВ-.вленных воздействием поля электрическо-го разряда с произвольной ориентациейв пространстве,На чертеже представлена блок-схемаустройстваПредлагаемое устройство содержитисточник питания, делитель напряженияна двух резисторах (постоянном 1 и переменном 2)о переключатель 3, емкость4, индуктивность 5, интеграторы 6 и 7,линейный аттенюатор 8, квадратичныйаттенюатоР Ов сУмматоРы 10-13 в блок14 задания пеленгао перемножители 15-5 ф 19, блок 20 задания ориентации.Устройство работает следующим . обра.. зомвИ нормальном состоянии емкость 4через замкнутый переключатель 5 заряжена до уровня напряжения,...
Адаптивная система контроля и регулирования

Номер патента: 1070507
Опубликовано: 30.01.1984
Авторы: Авдеев, Демичев, Емельянов, Изаак, Кузнецов, Мышляев, Парпаров, Сапрыгин
МПК: G05B 13/02
Метки: адаптивная
...с вторым входомпятого сумматора, выход блока деления соединен. через первый масштабирующий блок с вторым входом шестого сумматора, третий вход которогоподключен к выходу второго эадатчика, а выход - к второму входу второго блока умножения,.выход первого блока сравнения подключен квходу первого квадратора, выходтретьего блока сравнения - к входувторого квадратора, выход первогоэадатчика соединен с входом седьмогофильтра низкой частоты и через пятыйФильтр низкой частоты - с вторым входом пятого блока сравнения, выходпервого датчика соединен с входомвосьмого фильтра низкой частоты ичерез шестой Фильтр низкой частоты -с. вторым входом седьмого блока сравнения, выход источника постоянногосигнала. подключен через шестой блоксравнения к...
Предыдущий патент: Устройство для формирования сигнала рассогласования
Следующий патент: Способ работы двигателя внутреннего сгорания
Случайный патент: Передача к ведущим колесам моторных повозок