Патенты с меткой «курса»
Стабилизатор курса речных судов

Номер патента: 449853
Опубликовано: 15.11.1974
Авторы: Любимов, Мирошниченко, Муратиков, Ходырев, Ченцов, Шлеер
МПК: B63H 25/04
Метки: курса, речных, стабилизатор, судов
...коэффициенты.Сигнал Ус ДУС 1, а при повороте еще и сигнал пропорциональный производной от угловой скорости, поступает на УС 3 и далее усиленный сигнал Кз 1/ или.скоростного параметра подается на усилитель мощности 6, Сигнал От снимается с обмотки возбуждения сельсина 4, предварительно согласованного по положению ротора (штурвальчик) 7 с сигналом ИД 2, возбужденного вектором магнитного поля катушки компаса 13, 11 олученный курсовой сигнал предварительно усиливается с введением временной задержки в усилителе 5 и поступает в усилитель мощности 6. Суммированный в усилителе 6 сигнал является сигналом (У - бортсеть) управления питанием рулевого электропривода 8, отработка которого приводит к перекладке руля 14 и повороту рулевого датчика 9,...
Спсоб определения ухода корабля с курса вследствие дрейфера и неравномерного рыскания

Номер патента: 71509
Опубликовано: 15.07.1975
Автор: Гусев
МПК: B63B 49/00
Метки: вследствие, дрейфера, корабля, курса, неравномерного, рыскания, спсоб, ухода
...5,Тс 1 кцм Образос, Па лепте записывается сразу четыре криВых:8 псР, СОВ-, ф 251 П И ф,"РСОА,ПлаНИМЕтрИруя ЭТИ КРИВЫЕ СкладЫВся ИЛИ ВЫЧцтая ЗНаЧЕНИЯ ПЛОщадей, получают координаты корабля отцосцтельцо некоторой точки цякарте, где был включен прибор. Предмет изооретения Способ определения ухода корабля с курса вследствие дрейфа и неравномерного рыскания путем записи кривых зависимостей углов дрейфа и рыскания от проходимого пути ца ленте самописца, перемещаемой со скоростью, пропорциональной скорости корабля, определяемой лагом,Величина Х - = и (сов-; - фх ви;.) .с будет являться второй координатой корабля, характеризующей перемещение его от начальной точки двни(еция по линии задаццого курса.Одповремецная регистрация этой координаты...
Способ испытания бесконтактного авторулевого в режиме автоматической стабилизации курса на серийном судне

Номер патента: 501928
Опубликовано: 05.02.1976
Автор: Горстков
МПК: B63H 25/04
Метки: автоматической, авторулевого, бесконтактного, испытания, курса, режиме, серийном, стабилизации, судне
...машину, авторулевой -в режиме Автомат. На панели пульта управления авторулевого ручки изменения коэффи циента регулировки сигнала тахогенератора икоэффициента обратной связи устанавливают в положения, выставленные на ходовых испытаниях авторулевого. На пульт управления авторулевого подают сигнал изменения курса.25 Характер и величину сигнала изменения курсаподбирают такими, чтобы угол перекладки пера руля на оба борта не превышал 20. Фиксируют характер и величину изменения курса (амплитуду и частоту) по указателю курса 30 на пульте управления авторулевого, Фикси501928 Формула изобретения Составитель Ю. ГорстковРедактор С. Титова Техред Е, Подурушина Корректоры: Е. Давыдкина и В. Дод Заказ 657/9 Изд, Ма 209 Тираж 575 Подписное ЦНИИПИ...
Стабилизатор курса речных судов

Номер патента: 525059
Опубликовано: 15.08.1976
Авторы: Любимов, Мирошнеченко, Муратиков, Ходырев, Ченцов, Чистяков, Шлейер
МПК: G05D 1/02
Метки: курса, речных, стабилизатор, судов
...угла Ц р по иеедикатору снее щстабилизажрр,это достигаетсктее, что оь маетси с обмотки возбущения сельсина 6,содереещт доподцеетельньей дифференцирующееее 1 предварительно автоматически согласован-бпок, в котором формируется сигнал произ- ного по попожению ротора с сигналом иазукВОднОЙ От угла перекладки руля 1 циоееного датчикакурсовогэ угла, Возбужфспособствующий исключению Выбегаеице,; цеепеьем вектороел магнитного поля катушки .вход которого подлючен к датчику угла компаса 13, Этот сигнал усиливается сруди, а выход - ко входу третьего усидите- введением временной задерики Т в усилите,ди, а также тем, что в стабипизаторе усть- пе 4 и далее поступает в суммирующийЕОвлеее двигатель ОтспежнВания курсового усиепетоль 5 е уммирОВанный В...
Система стабилизации ьортобортовой качки и курса судна

Номер патента: 548842
Опубликовано: 28.02.1977
Авторы: Афремов, Ельский, Ермолаев, Круглов, Осипов, Пегов, Рапопорт
МПК: G05D 1/08
Метки: качки, курса, стабилизации, судна, ьортобортовой
...углам и угловым скоростям бортовой качки, которые поступают также матор 4, где складываются с сигналами, поступившими от датчиков 1.Затем суммарный сигнал поступает в механизм 6 машины 7, которая приводит в движение кормовой руль, положение которого фиксируется блоком 8 обратной связи.548842 Редактор Г. Борисова Тсхред А. Камышннкова Корректор И, Позняковская Заказ 535,8 Изд. Ьо 245 Тираж 1069 Подписное Типография, пр. Сапунова, 2 В результате и системс реализуется закон управления видаР = 1 (В ср, ) (р сй, 6) + КО + КаО, где р - заданный угол перекладки руля;о - фактический угол перекладки руля;1 - функция, реализуемая в известныхсистемах управления курсом;гр,гр - угол и угловая скорость рысканиясудна;КО - сигнал, пропорциональный...
Устройство для компенсации четвертной девиации датчика магнитного курса

Номер патента: 551506
Опубликовано: 25.03.1977
Автор: Увакин
МПК: G01C 17/30
Метки: датчика, девиации, компенсации, курса, магнитного, четвертной
...ротора расположенаопод 45 к полюсам статора, то индуктивные сопротивления обмоток 1-11 и П 1-17 равны, и ассиметрии цепей синхронизации между индукционным датчиком и СКТ-приемником не создается.Нри положении оси зубцов ротора пооси обмотки П 1- 1 Ч индуктивное сопротивление ее возрастает, а ток намагничивания уменьшается, что приводит к повороту вектора 15суммарной намагничиваюшей силы в плоскости СКТ-приемника компаса, изменяющемуся от курса по закону синуса.Знак синусной составляющей четвертнойдевиации определяется положением оси зуб- Мцов ротора относительно осей обмоток1-П и 111-1 М.В устройстве для компенсации косинусной составляющей четвертной девиации всилу последовательного и встречного попотоку намагничивания включения...
Задатчик курса судна с прогнозированием
Номер патента: 610721
Опубликовано: 15.06.1978
Авторы: Вальтер, Чинакал, Шлейер, Эпштейн
МПК: B63B 49/00
Метки: задатчик, курса, прогнозированием, судна
...отклонения оценки угловой скорости судна, зырабатываемые блоком моделирования угловой скорости судна от полной угловой скорости, вырабатываемой. датчиком 6. Возможна иная реализация фильтра, например в виде ограничителя уровня выходного сигнала по амплитуде. В этом случае сигнал на выходе фильтра позволяет учитывать только слабые возмущения, т. е. назначение фильтра 4 - резко ослабить в полном сигнале угловой скорости судна составляющую от возмущения морского волнения при неспокойном море. Исключение высокочастотных возмущений или ограничение большого уровня составляющей угловой скорости судна от морского волнения необходимо, чтобы обеспечить возможность матросу - рулевому эффективно использовать предлагаемый прибор при значительном...
Стабилизатор “нева” курса речных судов

Номер патента: 615456
Опубликовано: 15.07.1978
Авторы: Любимов, Мирошниченко, Муратиков, Ходырев, Ченцов, Чистяков, Шлейер
МПК: G05D 1/02
Метки: курса, нева, речных, стабилизатор, судов
...задержки курсового сигнала, блок 14 временной задержки сигнала на поворот, усилитель мощности 15, пост ручного управления 16, рулевой привод 17, руль 18, датчик угла руля 19, дифференцирующий блок 20, контакты 21, 22 переключателя 23 постов управления, контакты 24, 25, 26, 27 тумблера поворота, регулируемые резисторы 28, 29, 30, 31, 32, контакт 33 переключателя 23 постов управления.Стасилизатор курса управляется по закону= К 1 А+ К - д-+ КЛз + К ",где- угол перекладки руля,- угол отклонения от курса, Ьз, Ц - напряжения, пропорциональные соответствующим гараметрам,Сигнал с сельсина настройки 4 поступает на фазочувствительный усилитель 5 и далее на двигатель отслеживания 6, который приводит в согласованное с индукционным датчиком 2...
Система автоматического выжерживания курса землеройной машины

Номер патента: 616376
Опубликовано: 25.07.1978
Авторы: Дмитриевский, Козлов, Файнзильбер
МПК: E02F 9/22
Метки: выжерживания, землеройной, курса
...9.Гидроцилиидр 9 последовательно соединен с гкдроцилиндром 10, в магистрали соединения установлены клапаны 11-15.Шток гидроцилиндра 10 жестко соединен с датчиком 2 курса посредством штанги 1 б, установленной на корпусе машины с помощью пружины 17 двустороннего действия, 5 Работает система автоматического выдерживания курса следующим образом.При отклонении машины от курса вместе с ней отходит от копирной ли . нии и датчик 2 курса, он срабатывает включается золотник 7 и производится поворот колес.гидроцилиндром б. Это приводит к повороту рычага 4, перемещающего плунжер следящего золотника 8. Перекрытие его окон меняется так, чтобы поршень .гидроцилиндра 9 производил отслеживающее перемещение соединенного с ним корпуса следящего...
Индукционный датчик магнитного курса

Номер патента: 636480
Опубликовано: 05.12.1978
Авторы: Гольденберг, Морозов
МПК: G01C 17/30
Метки: датчик, индукционный, курса, магнитного
...3.Чувствительный элемент 1 содержит пермалоевый сердечник 4, обмотку возбуждения 5. сигнальную обмотку 6 с дополнительным выводом 7, а чу вствительный элемент 2 - соответственно сердечник 8, обмотку возбуж О дения 9, сигнальную обмотку 10 и дополнительный вывод 1. Обмотки 5 и 9 соединены последовательно и образуют цепь возбуждения датчика. -1 увствитсльный элемент 2 имеет больший коэффициент передачи, поэтому резистор 3 подключен к части его сигнальной обмотки между началом и дополнительным вь волом 11. работает след;юшим образом, о. что схема феррозондового го элемента 2 в данном случае схемс трансформатора с пероричной 10 обмотками, то подстора 3 к части его вторичной одит к падению напряжения636-180 Форыула изобретения аятолк Ь....
Устройство для определения магнитного курса

Номер патента: 669189
Опубликовано: 25.06.1979
МПК: G01C 17/30
Метки: курса, магнитного
...7 частоты подключен через формирующий блок 9 и фазовращатель 10 к 45обмоткам возбуждения датчика 1 магнитного поля, а выход генератора 11 соединен одновременно с входом делителя8 частоты и другим входом ключа 6,выход которого подключен к счетчику 5012.Датчик магнитного поля состоит иэдвух магниточувствительных элементовв виде взаимно перпендикулярных феррозондов 13 и 14, помещенных на площадке 15 двухосного маятникового подвеса 16, При этом магнитная ось одногоиэ феррозондов направлена по горизонтальной составляющей продольной осиобъекта,Устройство действует следующим сбраэом.Напряжение генератора 11 в видеимпульсов частоты , делится делителями 7 и 8 до частот 1 дч, и 1 дч, состветсМвекно, и одно из них ( 1 дч ) по-, 65(3) Блок 5...
Устройство для измерения магнитного курса

Номер патента: 669190
Опубликовано: 25.06.1979
Авторы: Королев, Коротков, Локтионов
МПК: G01C 17/30
Метки: курса, магнитного
...2 в виде ферроэондов, являющий3 6691ся индукционным преобразователем магнитного поля Земли в электрическийсигнал, сельсин 3, являющийся элементом сравнения, избирательное устройство 4, фазочувствительный делитель5 частоты, усилитель б мощности и двигатель 7 для отработки ротора сельсина 3. Избирательное устройство 4 выполнено на коммутируемом КС-фильтреи включенного между входом и выходомрезистора 8 и включенных через ключи9 и 10 параллельно выходу емкостей11 и 12. Ключи 9 и 10. подключены кудвоителю 13 частоты й) генератора 1,Устройство .работает следующим образом.Генератор 1 возбуждает феррозонды 15чувствительного элемента 2 напряжением переменного тока частотой д . Поддействием горизонтальной составляющеймагнитного поля Земли в...
Устройство для измерения курса движения подземного объекта

Номер патента: 734402
Опубликовано: 15.05.1980
Автор: Орлов
МПК: E21B 47/024
Метки: движения, курса, объекта, подземного
...случайные магнитные поля, напряжение сигнальных обмоток индукционного треугольника 2 по экранированному кабелю через фазовые усилители 4 поступает на параллельно включенные статоры двух сельсин-приемников 5 и 6. Результирующие магнитные потоки Фрэрэ 5 и Ф 6 имеют одно направление, определяемое распределением токов в сигнальных обмотках 3 индукционного треугольника 2 и совпадающее с направлением вектора горизонтальной составляющей магнитного поля Земли. Эти результирующие потоки индуктируют соответствующие напряжения в обмотках 7 роторов и 8. Напряжение с обмотки ротора 8 подается на вход усилителя 11 следящей системы, исполнительный двигатель 10 которой через редуктор 9 поворачивает ротор 8 .в согласованное положение, соответствующее...
Устройство для измерения магнитного курса

Номер патента: 769329
Опубликовано: 07.10.1980
Авторы: Запасный, Ковшов, Сергеев
МПК: G01C 17/30
Метки: курса, магнитного
...которого соединены с выходами фазовращателей 5 и б и синусной обмоткой ротора сельсина 3. Сумматор 7 предназначен для алгебраического сложения и уеиле ния ииформационного сигнала с противофазными,напряжениями частоты 3 а и ь. Выход сумматора 7 через синхронный детектор 2, работающий,при соотношении частот сигнала и управления 2: 1, и усилитель мощности 9 связан .с исполнительным двигателем,10 отработки ротора сельсина 3. Усилитель частоты 11 включен между синусной обмоткой ротора сельсина 3 и входом компаратора 12, предназначенного для выдачи сигнала управления на вход генератора 1, другой вход компаратора 12 соединен с косинусной обмоткой ротора сель- сина 3.Устройство работает следующим образом. 5 10 15 20 25 Зо 35 40 Регулируемый по...
Устройство для измерения магнитного курса

Номер патента: 787896
Опубликовано: 15.12.1980
МПК: G01C 17/30
Метки: курса, магнитного
...1 ЭДС, четные гармоники еп и еп которых могут быть представлены как50 в суммирующем элементе 3. Фильтр 4 из спектра выходного напряжения суммирующего элемента 3 выделяет одну четную гармонику, например вторую (п=2). Одновременно Фильтр 4 задерживает вредные нечетные гармоники, имеющиеся во входном сигнале из-за не- идентичности полуэлементов Феррозондов. Таким образом, вторая гармоника выходного напряжения фильтра 4 при отсутствии ошибок элементов 1, 2, 3 может быть записано в виде:О,р = Кь 1 п(4 к Ф й - Ч)(2)где К = К) Кь Кэ К 4 а КБ Кз К 4 коэффициенты передач соответственно фазосдвигающего блока 2, суммирующего элемента 3 и Фильтра 4.формирующий блок 5 формирует из выходного напряжения фильтра 4 короткие импульсы с крутым...
Устройство для определения угла зарыскивания при счислении курса судна

Номер патента: 897633
Опубликовано: 15.01.1982
Автор: Лазарев
МПК: B63B 49/00
Метки: зарыскивания, курса, судна, счислении, угла
...следующим образом.При работе электродвигателя 2 вращается конус 1. При изменении курса картушка 9 точного отсчета репитера поворачивает зубчатое колесо 7, которое перемещает зубчатую рейку 6 с фрикционным роликом 3. Вращение фрикционного ролика 3 передается через вал 4 на счетчик 5, с которого снимается курсовая интегральная площадь 5. Вначале задаются базовым курсом Кф. Приводят судно на базовый курс К и устанавливают рейку 6 так, чтобы колесо 7 заняло положение у ее конца, а ролик 3 находился на вершине конуса 1.Приводят судно на заданный курс, включают секундомер и снимают со счетчика первый отсчет интегральной площади. Элект897633 Формула изобретения Составитель Б. ДанТехред А. БойкасТираж 462арственного комитетизобретений и...
Устройство для измерения магнитного курса

Номер патента: 916987
Опубликовано: 30.03.1982
Авторы: Королев, Локтионов, Мельников
МПК: G01C 17/30
Метки: курса, магнитного
...усилителя мощности 6 и ис.35 полнитатьного двигателя 7, Фазочастот. ного элемента 8 в цепи 9 управления Фазовым анализатором 5.Устройство работает следующим образом.Угловое положение горизонтальной составляющей магнитного поля Земли преобразуется магнитомодуляционными преобразователями 2, например, феррозождами, и сельсином (или синусно 45 косинусным вращающимся трансформатором 3) в электрический сигнал, представляющий собой совокупность основной и высших гармоник частоты сигнала генератора 1, причем амплитуда второй гармоники (полезного сигнала)) 50пропорциональна модулю синуса измеряемого угла магнитного поля Земли, а Фаза принимает два значения О или 7 Г ,в зависимости от знака синуса измеряемого угла. Сигнал второй гармоники...
Устройство формирования курса

Номер патента: 635777
Опубликовано: 23.06.1982
Авторы: Иванов, Карчевский, Магнусов, Чистяков
МПК: G01C 19/38
Метки: курса, формирования
...б,11 оследовательно соединены датчик 14магнитного поля Земли, второй сумматор15, усилитель 16, двигатель 17, управляемый от реле 18 времени, фильтр 19, суммирующее устройство 20, повторитель угла,состоящий из датчика 21 угла, усилителя635777 Составитель В. Матвеев Корректор Е. Хмелева Техред А, Камышникова Редактор Е. Месропова Заказ 798/12 Изд.158 Тираж 629 Подписное НПО Поиск Государственного комитета СССР по делам изобретений и гкрытий 113035, Москва, Ж, Раушская наб., д. 4/5Типография, пр, Сапунова, 2 22, двигателя 23, выходы которого связаны с вторым сумматором 15 и датчиком 24 угла гиромагнитного курса. Устройство 25 широтной поправки состоит из задатчика 26 широты гр и интегратора 27, выход которого подключен к второму...
Устройство стабилизации курса многоопорной дождевальной машины

Номер патента: 1063308
Опубликовано: 30.12.1983
Авторы: Балыка, Куприевич, Потапов, Рыбалко, Стальнов
МПК: A01C 25/09
Метки: дождевальной, курса, многоопорной, стабилизации
...рычажно-кулачковую передачу, воздействующую на датчики 8, которые соединяются с пусковой аппаратурой двигателей (концевых задающих и центральных), и на аварийные выключатели 9, останавливающие машину при недопустимых отклонениях от курса.Устройство стабилизации курса дождевальной машины работает следующим образом.При отклонении машины от курса параллельно каналу из которого осуществляется забор и подача воды на полив дождеванием, общий фронт многоопорной дождеваль ной машины устанавливается под некоторым углом к осевой линии канала; двигаясь вперед, машина получает боковое смещение относительно канала, величина которого и регистрируется датчиками 8, связанными с пусковой аппаратурой двигателей концевых задающих характер движения...
Устройство для автоматической стабилизации курса транспортного средства

Номер патента: 1082340
Опубликовано: 23.03.1984
Автор: Морис
МПК: G05D 1/02
Метки: автоматической, курса, средства, стабилизации, транспортного
...Объектив 22может проецировать изображение одной из граней 18 или 19 на резистивный фотоэлемент 23, расположенный 25вертикально и поперечно световомупучку и также закрепленный на пластине 4.Изображение в плоскости резистивного фотоэлемента 23 одной изграней 18 или 19 имеет форму вертикального прямоугольника вполнеопределенных ширины и длины.Фотоэлемент 23 расположен такимобразом, чтобы принимать верхнююполучасть прямоугольного изображения через посредство маски 24,размещенной перед элементом 23 иснабженной щелью 25 с параллельными краями шириной, равной ширинеизображения грани 18 (или 19),проецируемого на элемент 23. Нижняяполучасть прямоугольного изображения проецируется на промежутокмежду двумя зеркалами 26, расположенными под...
Устройство стабилизации курса фронтальной дождевальной машины

Номер патента: 1099901
Опубликовано: 30.06.1984
Авторы: Балыка, Курпиевич, Потапов, Стальнов
МПК: A01G 25/09
Метки: дождевальной, курса, стабилизации, фронтальной
...7 1 обычно соотношение 3/1 и более величина возможного ложного сигнала существенно уменьшается и не достигает величины допустимого свободного хода для машины 1 юфта)Чувствительный датчик 8 закрепляется на оси 6 кулачка и качается совместно с рычагом 7 и кулачком 8 при возникновении сигнала, свидетельствующего об отклонении машины от курса.Рычаг 7 передает угловое отклонение на ось 6 воздействием продольных стенок паза на лыски оси 6. Устройство стабилизации курса дождевальной машины работает следующим обраПри обрыве троса направляющий рычаг 9 и рычаг 7 опускаются вниз под действием собственного веса в пределах продольногс) паза рычага 7, при этом профильный участок его 1 выступ) взаимодействует с чувствительным датчиком 8 обрыва...
Устройство измерения отклонения от курса фронтальной дождевальной машины

Номер патента: 1135464
Опубликовано: 23.01.1985
Авторы: Зеленихин, Самарин, Седов, Скорочкин, Степанов
МПК: A01G 25/09
Метки: дождевальной, курса, отклонения, фронтальной
...блок-схема устройства; на фиг. 2 - схема расположения индуктивных датчиков наднаправляющим проводом; на фиг. 3 - электрическая функциональная схемаустройства.Устройство измерения отклонения от курса фронтальной дождевальной машины содержит два индуктивных датчика 1 и 2, усилители 3 и 4 сигналов, селектирующую схему 5 и формирователь 6 сигнала откчонения. Магнитная ось датчиков 12 расположена вертикапьно во фронтальной плоскости 7 машины с двух сторон от направляющего провода 8 на диэлектрической штанге 9 на расстоянии между собой, равном ширине зоны регулирования;Формирователь 6 сигнала отклонения выполнен в виде блока деленя сигналов датчиков на основе аналого-цифрового преобразователя, вход опорного напряжения которого через...
Устройство контроля положения рабочего органа и курса движения дорожно-строительной машины

Номер патента: 1148949
Опубликовано: 07.04.1985
Авторы: Бирюков, Гольчанский, Ерошенков, Попов, Шалимов, Щербаков
МПК: E02F 9/20
Метки: движения, дорожно-строительной, курса, органа, положения, рабочего
...общий вид; на фиг, 2 - вид А на фиг. 1; на фиг. 3 - узел ползункового разъемного захвата; на фиг. 4 - дорожная машина, оборудованная устройством, вид спереди; на фиг. 5 - то же, вид сбоку. Устройство контроля положения рабочего органа и курса движения дорожно-строительной машины включает щуп 1, связанный сферическим шарниром 2 с гидро- распределителем 3, состоящим из четырехзолотникового блока 4 управления, в котором имеются каналы 5 управления, канал 6 подвода, каналслива жидкости,Шуп состоит из ползункового разъемного захвата 8 и Г-образного телескопического стержня 9, связанных между собой сферическим шарниром 10. На Г-образном телескопическом стержне 9 закреплена тележка 11 и установлена предохранительная 30 35 40 45 50 55 пружина...
Устройство для стабилизации курса сельскохозяйственного агрегата

Номер патента: 1160957
Опубликовано: 15.06.1985
Авторы: Амельченко, Антоневич, Кацыгин, Опейко, Пронько, Самадалашвили
МПК: A01B 69/04
Метки: агрегата, курса, сельскохозяйственного, стабилизации
...центральный шарнир 20, которым связана рама гидронавесного устройства 3 с остовом 1 . тягача, аналого-цифровой преобразователь (АЦП) 21. 25 30 35 40 45 50 55 Устройство работает следующим образом,При наличии силы тяги, величина которой превышает нижнее пороговое значение зоны нечувствительности, сигнал от датчика 5 силы тяги поступает в аналоговый компаратор 9, в котором сравнивается опорное напряжение 1.1-, соответствующее нижнему порогу зоны нечувствительности с напряжением, поступающим от датчика силы тяги, Поскольку второе напряжение оказывается большим, то компаратор 9 вырабатывает управляющий сигнал, который подается на усилитель 13 мощности, а затем на обмотку соленоида двухпозиционного электромагнитного (запорно-сливного)...
Формирователь сигналов отклонения от курса для фронтальной дождевальной машины
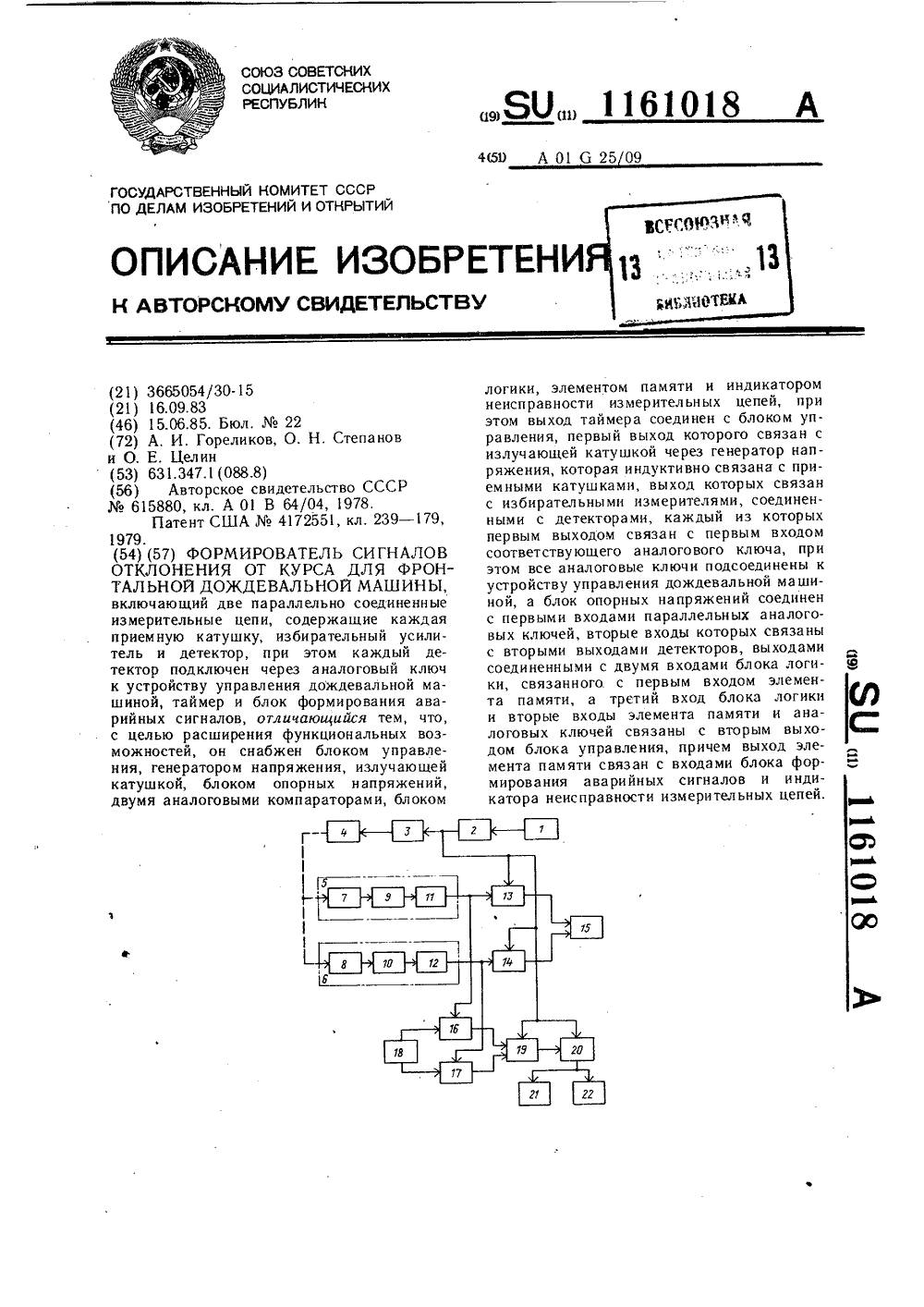
Номер патента: 1161018
Опубликовано: 15.06.1985
Авторы: Гореликов, Степанов, Целин
МПК: A01G 25/09
Метки: дождевальной, курса, отклонения, сигналов, формирователь, фронтальной
...управления дождевальной машиной 15, аналоговых компараторов 16 и7, входы которых соединены с выходами детекторов 11 и 12 и выходами блока 18 опорных напряжений, а выходы через блок 19 логики и элемент памяти 20 подключены к блоку 21 формирования аварийных сигналов и индикатору 22 неисправности измерительных цепей. При этом выход блока управления 2 соединен с управляющими входами аналоговых ключей 13 и 14, блока логики 19 и элементом памяти 20.Таймерможет быть выполнен на логических микросхемах, блок управления 2 можно выполнить в виде ждуцего мультивибратора, формирующего импульс заданной длительности. Генератор 3 напряжения может быть выполнен в виде операционного усилителя с двойным Т-образным КС-мостом в обратной связи....
Способ определения курса

Номер патента: 1180698
Опубликовано: 23.09.1985
МПК: G01C 19/38
Метки: курса
...горизонта, закрепленный наоси рамки 7, датчики 9 и 10 момента, датчик 11 угла, следящую раму12 с двигателем 13, датчик 14 курса, 20усилители 15 и 16, соединенные синдикатором 8 горизонта и усилитель17 следящей рамы 12.Гирокомпас 2 содержит ротор 18,рамки 19 и 20, индикатор 21 горизонта, закрепленный на оси рамки 20,датчики 22 и 23 момента, датчик 24угла, следящую раму 25 с двигателем 26, датчик 27 курса, усилителии 29, соединенные с индикатором 21горизонта, и усилитель 30 следящейрамы 25. Выход усилителя 15 черезсумматор 31 соединен с датчиком 9момента, благодаря чему создаетсямаятниковый момент на первом гирокомпасе. На второй вход сумматора 31из вычислительного устройства 4 поступают корректирующие сигналы, например, для компенсации...
Устройство для контроля точности индукционных датчиков магнитного курса

Номер патента: 1210059
Опубликовано: 07.02.1986
Авторы: Жуковский, Кудрявцев, Морозов
МПК: G01C 17/38
Метки: датчиков, индукционных, курса, магнитного, точности
...трансформатора 3, а другаявстречно к другой статорной обмоткевращающегося трансформатора 3. Последовательное и встречное соединениесигнальных обмоток индукционногодатчика 5 со статорными обмотками15 3 1вращающегося трансформатора 3 позволяет обеспечить неподвижное положение результирующего вектора встаторных обмотках вращающегосятрансформатора при поворотах валас контролируемым индукционным датчиком.Работа устройства для контроляточности трехфазных индукционныхдатчиков магнитного курса отличаетсяот работы устройства для контроляточности двухфазных индукционныхдатчиков магнитного курса толькоустановкойи подключением сельсина.Один из выходов соединенных звездойсигнальных обмоток трехфазного индукционного датчика подключаетсяк...
Устройство контроля заданного курса движения дорожно строительной машины

Номер патента: 1240838
Опубликовано: 30.06.1986
МПК: E02F 9/20
Метки: движения, дорожно, заданного, курса, строительной
...на плоскости определяется двумя координатами, положение объекта - тремя, появляется еще одна координата, связанная с ориентацией объекта управления. При движении машины по заданному копиром курсу, точность движения будет определять координата, связанная с линейным отклонением, и координата, связанная с ориентацией объекта. Координата,связанная с перемещением, на точностьдвижения влияния не оказывает и является информационным параметром, по которому судят о пройденном пути. Таким образом для идеального управления машиной по заданному курсу, необходимо иметь информацию, соответственно управлять по линейному отклонению Ь и курсовому углуУ .Устройство работает следующим образом.Копир 1 взаимодействует с контактной пластиной 3, которая...
Датчик магнитного курса

Номер патента: 1362930
Опубликовано: 30.12.1987
Авторы: Акперов, Бандурин, Сукиязов
МПК: G01C 17/30
Метки: датчик, курса, магнитного
...клем-, мой. Кроме того, параллельно соленоидам подключены переменные резисторы О и .Устройство работает следующим образом. При задании азимута движения объекта регулирования, датчик магнитно-, го курса, укрепленный на горизонтальной стабилизированной платформе, ориентируют так, чтобы оси соЛеноидов были перпендикулярны магнитному иере- диану (для получения максимальной чувствительности). Затем с помощью резисторов 1 О и 11 добиваются нулевого сигнала в регистраторе 8, При движении объекта заданным курсом сигнал на выходе устройства не появляется. При отклонении от заданного курса появляется разностный сигнал, который поступает на регистратор 8. Знак сиг" нала зависит от того, в какую сторону произошло отклонение от курса, а его величина...
Система определения курса подвижного объекта

Номер патента: 1385110
Опубликовано: 30.03.1988
Авторы: Артеменков, Ярлыков
МПК: G01S 1/08
Метки: курса, объекта, подвижного
...Фиг. 1 приведена структурная схема системы определения курса под вижного объекта; на Фиг. 2 - схема взаимного положения радиомаяков и подвижного объекта.Система определения курса подвижного объекта содержит первый назем ный радиомаяк 1, второй наземный радиомаяк 2 и бортовой измеритель курса 3 состоящий из инерциального измерителя курса 4, радиотехнического измерителя 5 дальности и направления 20 на первый наземный радиомаяк, радиотехнического измерителя направления на второй наземный радиомаяк б, вы деляются знаки в известном уравнении.Б таблице приведены условия выбора зоны и используемые при этом расчетные соотношения. Расчетные соотношения Зона, Б Условия выбора номеразоны Ч+ Р - 6 - о/ + 7( = О г= -м 1 ЗТ/2( 0 11 0 (7/2 Р+Р -с...