Задатчик курса судна с прогнозированием
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
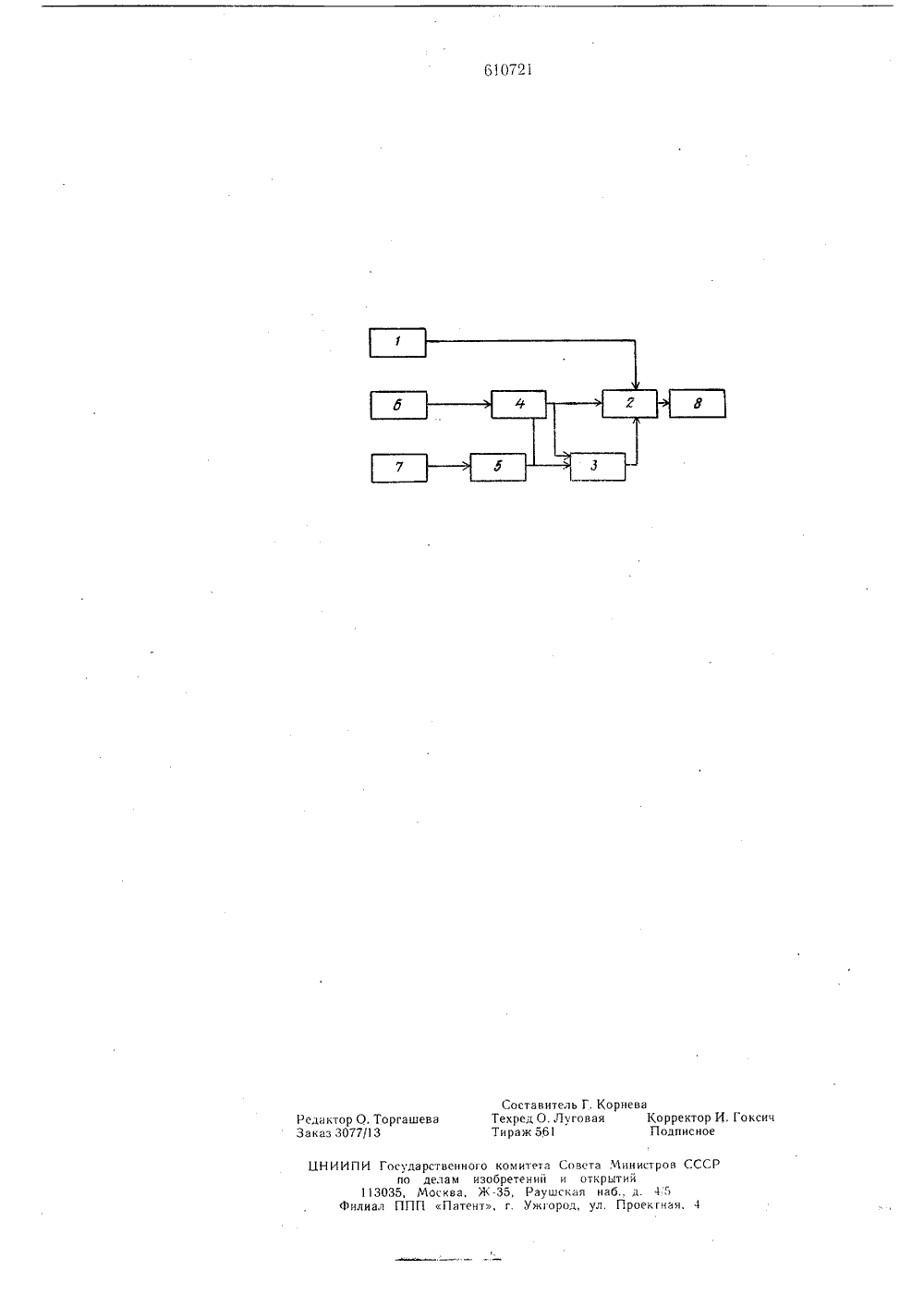
О П И"САН-И Е ИЗОБРЕТЕН ИЯ Союз Советскии Социалистицеских Республик. св влено 08.12.76(21) 2428066/27-1 2) М. К 63 В 49/О с присоединением заявк осударствеииыи комитетСовета Министров СССРоо делам изооретеиийи открытий 23) ритет(45) Дата опубликования описания 605.(72) Авторы изобретен Э. Шлейер, С. К. Чинакал, Л, Е. Эпштейн и Ж. О. Валь а Ленина институт проблем управлении АН СССР(54 ) ЗАДАТЧИК КУРСА СУДНА С ПРОГНОЗИРОВАНИЕМ обласвленияуправл п уавто ижны курсо ьтра, другои вход кото- чику угловой скорое н авлена функциональц:я и К ие точ вляется иработы моря.Цельжен блосудна, пока углаГОМУ ВХ снаборости датчик дру те,1 51 и достигается тем, чт ом моделирования дключенным входом ерекладки руля, а в ду нелинейного пр задатчи гловой ск к выходу ХОДОМеобразова и т 5 Изобретение относится к ти ол матического и ручного упра подв ми объектами, в частности ения м морского судна.Известен задатчик курса с прогнозированием, содержащий индикатор предсказанного значения курса, к входу которого подключен выход сумматора, один и другой входы которого подключены соответственно к выходам датчика курса и нелинейного преобразователя, один из входов которого подключен к выходу фильтра, датчик угловой скорости судна и датчик угла перекладки руля 1.Недостатками известного задатчика являют ся его низкие точность и стабильность при волнении моря из-за влияния внешних возмущений, уровень которых в ряде случаев превышает уровень текущего сигнала отклонения судна от курса.Целью изобретения я овышен ности и стабильности 1 РИ ВОЛНЕНИИ одному из входов филрого подключен к датНа чертеже предстсхема задатчика.Задатчик курса судна с прогнозирование;включает датчиккурса судна, соединенныйвыходом с Одним из ВходоВ сукматора 2,другому и третьему входам которого подключены Выхоы пели нечного преобразовтл 11и фильта 4. Выходы преобразователя 8 подключены соответственно к выходам фильтра 4и блока 5 моделирования угловой скоростисудна. Выход блока 5 подключен также к одному из входов фильтра 4, другой вход которого соединен с выходом датчика 6 угловой.корости судна,Вход блока 5 подключен к датчику 7, углаерекладки руля. К выходу сумматора 2 подлючен индикатор 8 предсказанного значениякурса.Устройство работает следую 1 цим образом.При необходимости изменить курс суднарулевой перекладывает руль в требуемом направлении, при этом на выходе датчика 7 углаперекладки руля вырабатывается напряжение,ропорциональное углу перекладки руля, кгорое поступает на вход блока 5 моделиро 1:.формула изобретения ния угловой скорости судна, выполненный в виде специализированной электронной вычислительной машины, на которой набраны дифференциальные уравнения углового движения суд на. На выходе блока 5 будет вырабатываться напряжение, пропорциональное составляющей угловой скорости судна от управляющего воздействия, отклоненного от диаметрали (балансировочного угла) руля.От воздействия отклоненного от балансировочного угла ргя судно начнет входить в циркуляцию, при этом на выходе датчика 6 угловой скорости судна вырабатывается напряжение, пропорциональное полной угловой скорости судна (включающее составляющую от внешних возмущений и составляющую от управляющего воздействия) . Напряжение с датчика 6 поступает на вход фильтра 4. На второй инверсный вход фильтра 4 поступает сигнал оценки угловой скорости с блока 5. Назначение фильтра - ослабить (исключить) высокочастотную составляющую полного сигнала угловой скорости и компенсировать низкочастотные отклонения оценки угловой скорости судна, зырабатываемые блоком моделирования угловой скорости судна от полной угловой скорости, вырабатываемой. датчиком 6. Возможна иная реализация фильтра, например в виде ограничителя уровня выходного сигнала по амплитуде. В этом случае сигнал на выходе фильтра позволяет учитывать только слабые возмущения, т. е. назначение фильтра 4 - резко ослабить в полном сигнале угловой скорости судна составляющую от возмущения морского волнения при неспокойном море. Исключение высокочастотных возмущений или ограничение большого уровня составляющей угловой скорости судна от морского волнения необходимо, чтобы обеспечить возможность матросу - рулевому эффективно использовать предлагаемый прибор при значительном морском волнении, повысить стабильность и точность показаний индикатора 8 (исключить многократные отключения прибора, связанные с рысканием судна).Оценка угловой скорости судна блока 5 моделирования угловой скорости судна поступает на вход нелинейного преобразователя 3, на другой вход которого поступает сигнал для компенсации низкочастотных отклонений оценки угловой скорости от истинного значения.На выходе нелинейного преобразователя 3 формируется напряжение, пропорциональное приращению курса, которое поступает на один из входов сумматора 2, на другой вход которого поступает сигнал текущего курса с датчика 1. На выходе сумматора 2 формируется предсказанное значение курса. Для повышения точности формирования предсказанного значения курса на вход сумматора 2 поступает сигнал с выхода фильтра 4. Сигнал с выхода о 15 ю 25 зо 35 40 45 50 сумматора 2 поступает на индикатор 8 предсказанного курса.При перекладке руля на индикаторе 8 вырабатывается величина будущего курса судна при условии, что матрос-рулевой, начиная с данного момента, приступит кодерживанию судна путем перекладки руля с максимальной скоростью в обратную сторону.Внешнее возмущение при этом сказывается незначительно, так как основным является сигнал оценки угловой скорости от блока 5, а сигнал полной угловой скорости судна от датчика 6 используется только для коррекции и повышения качества процесса стабилизации цри спокойном море или наличии слабого волнения.Наличие сигнала оценки угловой скорости и сигнала полной угловой скорости, прошедшей через фильтр, позволяет использовать также этот прибор при стабилизации судна в случае волнения. Действительно, если предсказанное значение курса будет уходить от заданного, то матрос-рулевой получает информацию о том, что спустя некоторое время судно окажется на новом направлении. В этом случае матрос- рулевой должен отклонять руль до тех пор, пока предсказанное значение курса не начнет убывать.Работа задатчика в режиме стабилизации курса судна отличается только тем, что на индикаторе 8 вырабатывается будущее отклонение судна от курса, вследствие морского волнения. Если величина будущего отклонения достигает, либо превышает допустимую величину отклонения судна от заданного курса, то рулевой должен отклонить руль на такую величину, при которой предсказанное значение курса совпадает с заданным значением. Задатчик курса с прогнозированием, содержащий индикатор предсказанного значения курса, к входу которого подключен выход сумматора, один и другой выходы которого поключены соответственно к выходам датчика курса инелинейного преобразователя, один из входовкоторого подключен к выходу фильтра, датчикугловой скорости судна и датчик угла перекладки руля, отличающийся тем, что, с цельюповышения точности и стабильности при волнении моря, он снабжен блоком моделирования угловой скорости судна, подключеннымвходом к выходу датчика угла перекладки руля,а выходом - к другому входу нелинейного преобразователя и одному из входов фильтра,другой вход которого подключен к датчикуугловой скорости.Источники информации, принятые во внимание при экспертизе:1. Авторское свидетельство СССР505156,кл. В 63 В 39/14, 16.07.74,610721 Составитель Г. КорневаТехред О. Луговая Корректор И. Гоксич Тираж 56 Подписное Редактор О. ТоргашеваЗаказ 3077/13 ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 4 Филиал ППП Патент, г. Ужгород, ул. Проектная. 4
СмотретьЗаявка
2428066, 08.12.1976
ОРДЕНА ЛЕНИНА ИНСТИТУТ ПРОБЛЕМ УПРАВЛЕНИЯ АН СССР
ШЛЕЙЕР ГЕНРИХ ЭРАЗМОВИЧ, ЧИНАКАЛ СВЕТЛАНА КУЗЬМИНИЧНА, ЭПШТЕЙН ЛЕВ ЕФИМОВИЧ, ВАЛЬТЕР ЖОРЖ ОСКАРОВИЧ
МПК / Метки
МПК: B63B 49/00
Метки: задатчик, курса, прогнозированием, судна
Опубликовано: 15.06.1978
Код ссылки
<a href="https://patents.su/3-610721-zadatchik-kursa-sudna-s-prognozirovaniem.html" target="_blank" rel="follow" title="База патентов СССР">Задатчик курса судна с прогнозированием</a>
Стенд для испытаний системы управления судном по курсу на волнении

Номер патента: 1050967
Опубликовано: 30.10.1983
Автор: Мордовченко
МПК: B63H 25/04
Метки: волнении, испытаний, курсу, системы, стенд, судном
...сигналов, формирую.щнй фильтр 2 (двойной Т-образный фильтр,выполненный на резисторах н конденсаторах), математическую модель 3 судна (дифференциальные уравнения движения суд-на, набранные на аналого-вычислительноймашине), имитатор 4 гндрокомпаса, пульт5 снствмы управления (в нем находятся сельснн-приемннк гирокомпаса, кинематически связанный с датчиками курса, днфференцнрующне н ннтегрирующне устройства, выключателя питания насосов рулевой машины н индикаторы курса н руля), исполнительный механизм 6, имитатор 7 рулевоймашины и датчик 8 обратной связи.Кроме того, в схему стенда включеныблоки 9 н О выделения модуля (эмиттерные повторители, выходы которых подключены к однойолупериодным выпрямнтеляМс КС-фнльтрамн), электрически...
Способ введения сигнала скорости ухода судна с курса в систему “авторулевого”

Номер патента: 134158
Опубликовано: 01.01.1960
Автор: Гребенщиков
МПК: B63H 25/04
Метки: авторулевого, введения, курса, сигнала, систему, скорости, судна, ухода
...схеме предлагается исключит ифференцирующий узел и использов ачестве сигнала, пропорционального с л, поступающий с усилителя на следя тривающие специаль в себя редуктор, та альный скорости ухо ь из конструкции ав ать для работы авто сорости ухода судна щий электродвигател отвращения ооратного влияния сум 1 ого (курсового и обратной связи) ежду схемой следящей системы посл ить разделительные устройства люб арного сигнала в схема схему гирокомпасаеднего и схемой автого известного типа. зобретени дме Способ введения сиги авторулевого с гирокомпа личающийся тем, что нала, пропорционального нал, поступающий с усил мотор) гирокомпаса, ала скоросом и усис цельюскоростиителя на с Общеизв ные диффере хогенератор,да судна с к В предлторулевого...
Датчик углового положения, скорости и ускорения вращения вала

Номер патента: 1107055
Опубликовано: 07.08.1984
Автор: Каплун
МПК: G01P 3/489
Метки: вала, вращения, датчик, положения, скорости, углового, ускорения
...10 задержанных импульсов, первый выход которого подключен к входу разрешения записи второго регистра 11. Информационные входы регистра 11 соединены с соответствующими выходами триггеров второго счетчика 7, вход предустановки которого подключен к второму выходу Формирователя 10 задержанных импульсов, третий выход Формирователя 10 соединен с входом установки в единичное состояние дополнительного триггера 9, Выход нуль-органа 5 соединен также с первым входом фазового детектора 12, выход которого подключен к входу Фильтра 13 нижних частот и входу ин тегратора 14. Выход интегратора 14 подключен к входу суммирующего элемента 15, другой вход которого подключен к выходу фазового детектора 12, Выход суммирующего элемента 15 под1.1...
Устройство для стабилизации движения быстроходного судна по курсу

Номер патента: 643382
Опубликовано: 25.01.1979
Автор: Руденко
МПК: B60V 1/11
Метки: быстроходного, движения, курсу, стабилизации, судна
...судно с предлагаемым устройством, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение АА на фиг. 1; на фиг. 4 - функциональная схема действия предлагаемого устройства.Устройство для стабилизации движения быстроходного судна по курсу снабжено датчиком 1 давления воздуха, установленным у входного воздушного тракта о,газовой турбины 2 двигателя 3 и реагирующим на разрежение воздуха в этом тракте.Датчик 1 при помощи электрокабелей4 и 5 связан соответственно с исполнительным и питательным органами системы 6 аварийной остановки двигателя 3.Устройство работает следукпцим образом,, Нормальная работа турбины 2 без помпажа характеризуется определенным интервалом показаний датчика 1В случае превышения разрежения в тракте а, которое...
Следящий фильтр для обработки сигнала с подавленной несущей, фаза которого манипулирована по закону бинарной псевдослучайной последовательности

Номер патента: 1007055
Опубликовано: 23.03.1983
МПК: G01S 7/46
Метки: бинарной, закону, которого, манипулирована, несущей, подавленной, последовательности, псевдослучайной, сигнала, следящий, фаза, фильтр
...16 этого канала будетбольше, чем в другом канале. Аналогичная разность сверток, но когерентным образом, Формируется в третьемдополнительно введенном канале, которая складывается с некогерентнойразностью в сумматоре 17. Коэффициент усилителя когерентного каналарегулируется в зависимости от величины о, которая оценивается по количеству перескоков фазы пороговымустройством 24 и счетчиком 25, выходкоторого соединен со входом усилителя 23. Полученный сигнал ошибки осуществляет подстройку УТГ 19, в результате чего задержка генератора 20кодов соответствует задержке принимаемой последовательности,Устройство является адаптивным котношению сигнал/шум и промежуточным между когерентным и некогерентным, а степень близости его к томуили другому...
Предыдущий патент: Толкаемая ледоочистительная приставка судна
Следующий патент: Способ докования судов
Случайный патент: Устройство сигнализации аварийного режима работы многодисковой фрикционной предохранительной муфты