Патенты с меткой «технологический»
Роботизированный технологический комплекс

Номер патента: 1442296
Опубликовано: 07.12.1988
Автор: Хлуденев
МПК: B21D 43/00
Метки: комплекс, роботизированный, технологический
...4 плоские заготовки под действием сил инерции, ориентированнымипоштучно, выдаются в полость корпуса верхнего накопителя 7, где ониукладываются в стопу, а при ее за 35полнении до уровня верхнего датчика11 вибробуцкер 4 отключается.По команде с пульта 5 включаетсяшиберный питатель, нижняя плоскаязаготовка выталкивается из верхнегонакопителя 7 верхней частью 9 ступенчатого шибера и перемещается понаправляющим 13 и 14 вплоть до укладки ее в полость корпуса цижнего накопителя 8, одновременно из этогонакопителя нижней частью шибера 10плоская заготовка подается на позицию захвата промьпдлеццого робота 3.Рука промышленного робота 3 захватывает плоскую заготовку вакуумным50или магнитным схватом и переносит взону штампа 2, укладывает ее...
Роботизированный технологический комплекс для электрохимической струйной обработки

Номер патента: 1442341
Опубликовано: 07.12.1988
Авторы: Глазунов, Ерофеев, Соболев
МПК: B23H 9/16
Метки: комплекс, роботизированный, струйной, технологический, электрохимической
...жгутом 19, штанги 20, связанные сферическим шарниром 21 с механизмом 22 привода, кислотостойкий материал 23, натянутый между звеньями 16, и направляющие 24.Роботизированный комплекс работает следующим образом,Робот 2 с помощью руки и токопроводящего захвата 4 берет предварительно ориентированную заготовку из загрузочного устройства 5 и переносит ее в рабочую камеру 11, располагая в нужном положении под электродом-инструментом 12, установленным в рабочей головке 7. Камера после входа в нее руки робота закрывается экраном 14, полностью локализуя рабочее пространство. Через неподвижную головку 7 о гидростанции 8 к электроду-инструменту подают электролит.Для предотвращения коротких замыканий и локализации зоны подведения напряжения...
Технологический комплекс по производству железобетонных изделий

Номер патента: 1445974
Опубликовано: 23.12.1988
Авторы: Аксельрод, Ананьев, Андрейченко, Болтинский, Гусев, Демьянюк, Медовский, Подлесных, Щелоков
МПК: B28B 5/04
Метки: железобетонных, комплекс, производству, технологический
...смеси верхнего слоя сФормовочной машиной 36, отделки поверхности с заглаживающей машиной 37. Туннельные пропарочные камеры 4связаны с линиями 3 формования передаточными тележками 38.Линии 5 сборки объемных каркасовс кондукторами, контейнеры 39 исходной арматуры и транспортерьг.накопители для подачи объемных каркасовк постам укладки в Формы расположенына камерах 4.На камерах термообработки расположены также установки приготовленияфактурного раствора 29, вспениватель34, композиционный смеситель 35 утеплителя, а также линия 40 съема, чист"ки, смазки и установки проемообраэователей.Технологический комплекс работаетследующим образом,Арматурная сталь поступает на линии 1 изготовления арматуры по видамобработки. На линиях и станках...
Роботизированный технологический комплекс

Номер патента: 1449315
Опубликовано: 07.01.1989
Авторы: Волоценко, Зильберлейб, Петров, Полиенко, Решетнев
МПК: B23Q 3/155
Метки: комплекс, роботизированный, технологический
...4. Магазин 5 состоит из двух симметричных относительно оси 6 платформ 7 и 8, на которых смонтированы ложементы 9 кассет 10. Кассеты 10 имеют два уровня, на которых могут размещаться заготовки валов (фиг.З).Угол(фиг.1 и 2) между платформами 7 и 8, обеспечивающий одновременное расположение одной из платформ параллельно траектории перемещения средства для загрузки магазина, а другой - по нормали к траектории движения схвата робота, выбирается из расчета где Ь - размер кассеты в направлении,нормальном линии выдвижениясхвата;В. - минимальное расстояние отоси схвата до начала координат,На этот же уголможет поворачиваться магазин 5.На платформах 7 и 8 смонтированыдвуплечие рычаги, одно иэ плеч 11 и12 которых предназначено для...
Роботизированный технологический комплекс

Номер патента: 1465264
Опубликовано: 15.03.1989
МПК: B23Q 41/02
Метки: комплекс, роботизированный, технологический
...станка внаправлении перемещения гнезда навеличину, зависящую от времени выгрузки детали из гнезда и окружнойскорости вращения гнезда многогранника. На корпусе 36 закреплен кронштейн-ловушка 40 с роликом 41, Тран-,спортный накопитель 3 выполнен в виде двухручьевого цепного транспортера, по ручью 42 которого подаютсязаготовки 12 с отсечением одной длязахвата автоматическим манипулятором,по ручью 43 отводятся обработанныедетали 33.Перед работой комплекса по циклуего механизмы находятся в исходныхположениях. Исходное положение автоматического манипулятора 2: каретка17 над транспортным накопителем 3,рука 26 в верхнем Фиксированном по"ложении, захват 31 для заготовки разжат, в захвате 32 зажата обработанная деталь.Исходное положение...
Роботизированный технологический комплекс

Номер патента: 1465390
Опубликовано: 15.03.1989
Авторы: Архипкин, Гусаков, Мариев, Степанов, Чечекин
МПК: B65G 47/10
Метки: комплекс, роботизированный, технологический
...перемещаться во втулке 20,Накопитель 4 выполнен в виде роликовой секции 21, а перемещение кассет 6 на накопитель может осуществляться с помощью пневмоцилиндра 22, подвижная каретка 23 которого снабжена собачками 24.Транспортная кассета 6 выполнена в виде сварной конструкции и разделена на несколько продольных относительно оси шагового конвейера 1 секций ровной длины (на фиг. 8- - 11 показана двухсекционная кассета с секциями 25 и 26) . Каждая секция снабжена разрезными призмами 27, которые делят ее на несколько (на три) поперечных секции по осям 28, 29 и 30. В нижней части кассета 6 имеет проемы 31 и 32 для ввода призматических ложементов 11, соразмерные последним. Втулки 33 служат для фиксации кассеты 6 пальцами шагового конвейера...
Технологический инструмент роликового стана

Номер патента: 1468621
Опубликовано: 30.03.1989
Авторы: Боев, Григоренко, Данченко, Живцов, Кириченко, Фельдман, Филатов, Эсаулов
МПК: B21B 21/02
Метки: инструмент, роликового, стана, технологический
...р - К=Кз., остальные участки 2 р - Зр, Зр - 4 р. 4 р - 5 р, 5 р - 6 р имеют радиусы, лежащие в пределах Кгаг(К 2- З(КЗ(К 4 - 5(К 5-5(Кззг. ЧИСЛО участков дуг, очерчивающих ручей, равно числу участков опорных планок 1 п - 7 п (фиг. 3), центры радиусов дуг соседних участков располагают на оси симметрии ручья и они отстоят друг от друга на величину разности высот соседних участков планок. Центр радиуса центральных дуг 6 р - 7 р соответствует точке О (фиг. 4). Центр радиуса дуг 6 р - 5 р отстоит из точки О на величину (фиг. 3), равную разности высот планок в сечениях 6 п и 5 п и соответствует точке 05 на оси симметрии (фиг. 4), Центр радиуса дуг 5 р - 4 р отстоит из точки 05 на величину, равную разности высот планок в сечениях 5 п и 4 п и...
Технологический инструмент для волочения изделий в режиме гидродинамического трения

Номер патента: 1468630
Опубликовано: 30.03.1989
Авторы: Востриков, Кранчева, Соломин
МПК: B21C 3/14
Метки: волочения, гидродинамического, инструмент, режиме, технологический, трения
...напорная 3 и рабочая 4 волоки, между которыми размещен уплотнительный элемент в виде двух колец 5 и 6, соединенных через паз-выступ с образованием внутренней полости и установленных с возможностью относительного осевого смещения.В корпус ввинчена гайка 7, удерживающая конусную втулку через нажимное кольцо 8.Сборку инструмента осуществляют следующим образом.В зажимную конусную втулку 2 устанавливают рабочую волоку 4, уплотнительный элемент, состоящий из колец 5 и 6, напорную волоку 3. Затем зажимную конусную втулку 2 запрессовывают в корпус 1 с усилием, позволяющим получить упругие деформации корпуса, превышающие термические не менее чем в 2 раза. На торец напорной волоки устанавливается нажимное кольцо 8 и в корпус ввинчивается гайка 7,...
Технологический модуль

Номер патента: 1468718
Опубликовано: 30.03.1989
Автор: Беляков
МПК: B23Q 41/02
Метки: модуль, технологический
...нем емкостями 16 цилиндрическойформы для укладки в них деталей 7. В опорном кольце 15 выполнены отверстия 17, входяшие в каждую из емкостей 16 с возможностью установки кассеты 4 на ориентирующие стержни 14 стола выдачи 3,Каждая из цилиндрических емкостей 16снабжена расположенными радиально двумяоппозитными окнами 18 с возможностьювыдачи через них толкателем 13 на лоток 5загрузки деталей 7.Технологический модуль работает следующим образом.С помощью транспортного средства (непоказано) кассета 4, заполненная необработанными деталями 7, устанавливается наповоротную платформу 8 стола 2 приема.При этом окна 18 одной из цилиндрических емкостей 16 устанавливаются против 5 1 О 15 20 25 30 35 40 45 50 55 гтолкателя 13 и лотка 5 загрузки,...
Роботизированный технологический комплекс

Номер патента: 1472259
Опубликовано: 15.04.1989
Авторы: Абрамов, Куров, Тимофеев, Яснов
МПК: B25J 15/00, B25J 19/02
Метки: комплекс, роботизированный, технологический
...и содержит основные контакты.Устройство содержит ползун 9 с элементом 10 кинематической связи, выполненным в виде магнита. Ползун 9 поджат вниз до упора пружиной 11. В нижней части ползуна 9 жестко закреплена игла 12, служащая дополнительным контактом устройства очувствления, которая связана проводником 13 с системой управления. Захватываемый объект 14 обработки располагается в электропроводной пресс-Форме 15, связанной с системой управле ния проводником 16. Объекты укладываются в ступу 17 на накопитель 18,Комплекс работает следующим образом.По окончании изготовления объекта 14 манипулятор опускает захватное устройство в направлении пресс-формы 15, При опускании захватного устройства на пресс-Форму система управления производит опрос...
Устройство для отгибки и задачи переднего конца полосы с разматывателя в технологический агрегат

Номер патента: 1479160
Опубликовано: 15.05.1989
МПК: B21C 47/16
Метки: агрегат, задачи, конца, отгибки, переднего, полосы, разматывателя, технологический
...стол 21. Устройство работает следующим образом.На барабане разматывателя 17 устанавливается рулон 18. Все элементы устройства находятся в исходном, близком к вертикальному, положении (фиг. 7). Включается гидроцилиндр 15 поворота двуплечего рычага 6 со скребком 9, и последний поднимается в крайнее верхнее положение. Подъемный стол 21 загрузочного устройства поднимается до упора в рулон 18, гидро- цилиндр 13 поворота рамы 1 накладывает скребок 9 вместе с прижимным роликом О на рулон 18, а прижимной ролик 12 прижимает верхний виток рулона 18 при ггомоши пневмоцилиндра 16 (фиг. 2).Одновременным включением гидроцилиндра 14 подьема каретки 4 и гидроцилиндра 15 поворота двуплечего рычага 6 со скребком 9 производится отгибка переднего конца...
Технологический центр

Номер патента: 1505679
Опубликовано: 07.09.1989
МПК: B23B 31/40
Метки: технологический, центр
...деталей за счет равномерного зажима.На фиг. 1 изображен центр, продольный , осевой разрез; на фиг. 2 - конусная встав ка, аксонометрия.Технологический центр состоит из упругой втулки 1, содержашей рабочие элемен,ты 2, равномерно расположенные по окружности, соединенные гибкими перемычками 3 с заходной частью 4 и фланцем 5, наружная поверхность 6 втулки 1 выполнена цилиндрической, а внутренняя 7 конусной, при этом рабочие элементы 2 разделены между собой посредством замкнутых прорезей 8, выполненных между внутренними торцами заходной части 4 и фланца 5 и параллель-ных оси центра. Конусная поверхность 7 , взаимодействует с соответствующей поверхностьюю конусной вставки 9, имеющей резь- , бовой конец 10, на котором расположена...
Автоматизированный технологический комплекс

Номер патента: 1509225
Опубликовано: 23.09.1989
Автор: Игнатьев
МПК: B23Q 41/02
Метки: автоматизированный, комплекс, технологический
...к складу 2, транспортные тележки 7 (фиг. 2) имеют устройство точного останова около приемных столов 5 и устройство перегрузки тары 6 на приемные столы 5 и в ячейки 11 склада 2 и обратно на тележку 7.Технологический комплекс оснащен системой управления, работающей с помощью ЭВМ (не показана).Комплекс работает следующим образом.В складе 2 в ячейках 9 хранится пустая тара и тара с заготовками, которые частично или полностью не обработаны. В таре 6 по заранее разработанной схеме в зависимости от длины и диаметра заготовок производятрегулировку лотков 32 и 33 путем перемещения их по продольным пазам 34 и поперечным пазам 31 кронштейнов 30, а затем укладывают заготовки 10 и соответствующий технологически й валик 41. Уком плектованная тара 6...
Автоматизированный технологический комплекс для обработки фасонного и сортового проката

Номер патента: 1511020
Опубликовано: 30.09.1989
Автор: Шухатович
МПК: B23D 23/00
Метки: автоматизированный, комплекс, проката, сортового, технологический, фасонного
...опорных роликов 39 и 51; так, чтобы сечение обрабатываемого проката при контакте с боковой поверхностью роликов 44 и 53 было сцентрировано относительно ножей штампа 57.На приемный стеллаж 1, выдвинутый из-под эстакады 5 манипулятора 6, укладывают цеховым краном пачку исходных заготовок. Затем стеллаж 1 перемещают под эстакаду 5 и перед захватом заготовок устанавливают его так, чтобы пачка заготовок (при одинаковой длине заготовок, составляющих пачку) или захватываемая заготовка (при различной длине заготовок, составляющих пачку) располагалась по длине симметрично относительно манипулятора 6. Заготовки из пачки поштучно захватывают электромагнитными захватами 7 манипулятора 6. Если заготовка 63 (из фасонного или специального проката)...
Роботизированный технологический комплекс

Номер патента: 1511110
Опубликовано: 30.09.1989
Авторы: Андреев, Снеховский, Френкель
МПК: B25J 11/00
Метки: комплекс, роботизированный, технологический
...механизм 11 продольного перемещения в виде силового цилиндралинейного перемещения, закрепленногона выходном элементе 12 механизма 9 поворота, Исполнительное устройство имеет также клеть 13, содержащую силовой цилиндр 14 вращательного перемещения, корпус 15 которого закреплен на штоке 16, а также направляющую 17 механизма продольного перемещения и механизм 18 вертикального перемещения, силовой цилиндр 19 которого встроен в корпус 15. На рамочной. направляющей 20, соединенной со штоком 21 и скалкой 22, которая перемещается по роликам 23, закреплен с помощью кронштейна 24 рабочий орган 25 в виде магнитного патрона для удержания заготовки 26.Технологическое оборудование в виде прессов 27 размещено в рабочей зоне исполнительных устройств,...
Технологический ротор роторно-конвейерной линии

Номер патента: 1511186
Опубликовано: 30.09.1989
Авторы: Ванагс, Ворошнин, Езепс, Конюшевская, Миесниекс, Шведов
МПК: B65G 29/00
Метки: линии, ротор, роторно-конвейерной, технологический
...5. Ось 9 40размещена в упругой втулке 1 О, установленной в отверстии сектора 3. Рабочую 2 звездочку охватывает цепнойконвейер 11, в шарнирах которого размещены шпиндели 12, содержащие баэирующие наружные цилиндрические поверхности 13 с геометрическим центром14 врацения шпинделей 12. В шпинделях12 закреплены изделия 15. На валу 1установлен диск 16 с размещенными нанем фрикционными механизмами 17, содержащими ведущие фрикционные ролики18 и приводные шестерни 19. На валу 1в подшипниках 20 свободно установленблок 21, состоящий из раздаточнойшестерни 22, соединенной с приводнойшестерней 19, и приводной 23 звездочки, соединенной цепью 24 с приводомвращения фрикционов ( не показан). На валу 1 закреплена приводная 25 звездочка, соединенная цепью...
Роботизированный технологический комплекс прессования изделий из таблетированных пресс-материалов

Номер патента: 1512785
Опубликовано: 07.10.1989
Авторы: Воробьев, Лехель, Степанова, Шпиндель
МПК: B29C 43/34
Метки: комплекс, пресс-материалов, прессования, роботизированный, таблетированных, технологический
...опускаются в направляющие 17 до упора в поверхность шибера 26 (фиг. 5). Скалки 23 устанавливаются по высоте расположения в зависимости от объема требующейся прессовой дозы за счет их переустановки в пазах 25 опор 24.По команде от системы 1 О управления РТК рука робота с кассетой выходит на позицию загрузки таблеток под механизм 13 выдачи таблеток. Вертикальные направляющие 30 многогнездной сменной кассеты 8 устанавливаются напротив вертикальных направляющих 17. Срабатывают датчики положения руки робота-манипулятора 7 и от системы 10 управления подается сигнал на работу пневмоцилиндра 28, который через рычаг 27 сдвигает шибер 26. При этом передвигаются опоры 24 со скалками 22. Прижимы 20 входят в пазы 19 направляющих 17 и упираются в...
Технологический ротор для сборки линз

Номер патента: 1521548
Опубликовано: 15.11.1989
МПК: B23P 19/02, B23P 19/04
Метки: линз, ротор, сборки, технологический
...0)сн) яфи . 2):,и. К.,Ь - (.(и) БРс БР 3 рг.сстц 5 нц. От 00 ь(ктивд 6 дц 3,1 Г 8 и дц центры кри низ)ц пы(ю Й 301( пхисти лиц Ц 1;- радиус крцвпзцц рдб(чей пцверхги 1 5)30)к)Р 1:тцм 1 4, ны 3 П 1 жпсп повсрхОсти которого зыкреплсп пьезоэлемент 15, эгСктрчески сцязацньЙ с приводом 5.ТехногОгиРеки 1 ротор )Вботыс следуюИич образом.При БрансиИ Рх 0.10 цеского ротора траспортный ротор )н,ц (дзд) Отжимает пус 11 сцц2 вниз н чс ц "БВ,1(" В 10 жсмн Г 4 рг)з)кытцй 1)цг 1 0 рг)ву 6 с лицзоЙ 7. Затем трацспцр ц.г и):)дПмастся и уход)т цз рыюй з,БЗ,РХ 3 гОги 3(ского ротора. При этом )уыщцц 2 сжимает цынгу 1:1, фиксируя орыв .5 ч:ожсмРпте 14. Дг)сее второй трдпсюртпцй ротор не покд:171 нус Гдцгвгива(.т Б цп)713)Ь синзч 1со слоем клея, нанесенным...
Способ прокатки труб на редукционном стане и технологический инструмент для его осуществления

Номер патента: 1523201
Опубликовано: 23.11.1989
Авторы: Блинов, Кузнецов, Никитюк, Осламенко, Столетний, Фридман, Халамез, Шамраков
МПК: B21B 17/14
Метки: инструмент, прокатки, редукционном, стане, технологический, труб
...диаметра при почти неизменной стенке, то величина смещения калибра от начала стана к концу также уменьшается, а радиусы изгиба К; увеличиваются (фиг.1), Это5 15объясняется тем, что сечение меньшей жесткости йри наименыиих значениях воздействующих изгибающих моментов переходит в пластическое состояние.Фактическая толщина стенки трубына выходе из стана, соответствующая общему фактическому натяжению, определяется какра ктБк кНнгде Б - толщина стенки, получаемаяна выходе стана работают нщего с натяжением ЕОба фрассчитанным без учета изгиба;6 Бд - дополнительное от введенияперегибов трубы утонениестенки.Проверку эффекта появления дополнительной вытяжки от наложения изгибов трубы прн ее беэоправочной прокатке с натяжением провели на...
Технологический сепаратор для испытаний роликоподшипника буксового узла

Номер патента: 1523940
Опубликовано: 23.11.1989
Авторы: Андриевский, Гайдамака
МПК: G01M 13/04
Метки: буксового, испытаний, роликоподшипника, сепаратор, технологический, узла
...фиг, 1; нд фиг. 4 - нид В на фиг. 1 на фиг, . - рзрея.д иг, 2;на)иг, б " я и г 1и; 1 я фиг, 7 " рдрез 1 Ч гд;,"иГнид)дт р 1 со,ог 1 очные перемычки 2 с ге 1." .пе разодте.1- ми 3 ус ИЗнйчи д е 111 ь и 1 н , косольных бдк 1:," и отл 1 - ния, проди.;ььс 1 ер , ", со ".кнозными Г-обрдзиымп 1 р: ,и 5 и них со с то)оны пс 11 1 л) уюг:я кон б, образующ 11;иен сб, ;и 7,:1 выло 1:енными тдк, чт н ",р р=,., .дходит я закрегеии,-я нд сеид 1 нстд кд 3, Теизопреобрдоьдге 1; 9 усилий н ниде упругх пляс г;:; 10 нд днух опорах1 установивя и иям уг.льных пазах 12 пос редине ., оцогьно 1 перемычки 4 со стороны 1 езв 13 сеиараторд 1, в котором рдс пояо кень ензопреобразователи 3 усилий д поперечных перемычках ", Тепдореобрдзона - тели 14 перемещени 1...
Автоматизированный технологический комплекс

Номер патента: 1528644
Опубликовано: 15.12.1989
Авторы: Каган, Канер, Прошляков, Шаров
МПК: B23Q 41/02
Метки: автоматизированный, комплекс, технологический
...26. В опорцы п.анках 22 всц)олены пизы 27, схватывзю(цие рачу 21, упругии элечсцт 25 и направлякшук 26. 5 10 15 20 25 30 35 40 45 50 55 Упоры 11 могут быть выполнены подпружиненными. В этом случае пальцы 17 расположены выше упоро 11 ца величину сжатия упругого элемента 25 накопителя, а суммарная сила сжатия Р, пружин упоров 11 больше суммарной максимальной силы сжзти Р упругих элементов 25, т.е. Р)РлКомплекс работае( следующим образом.В режиме запуска комплекса порожние поддоны деталей с почошьн цеховых перегрузочных средств устанавливают на роль- ганг напротив стенда 6. 111 тзбелер иерегружзе поддон 20 ни рольганг 4, доводя его до упора 18 над фиксаторами 19. ПосЛЕДЦИС ЦЕРс МЕ(ЦаЮтСЯ ВВЕРХ И СОВЧЕСтНО С л цороч 18 обеспецивают...
Роботизированный технологический комплекс

Номер патента: 1530432
Опубликовано: 23.12.1989
Авторы: Аракелян, Графчев, Джавахян, Мирзоян, Саркисян
МПК: B25J 1/06, B25J 11/00
Метки: комплекс, роботизированный, технологический
...подачи эаготовки. Захватное устройство снабженоупором 18, а устройство подачи и приема деталей - выступами 19.Комплекс работает следующим образом,50После завершения процесса обработки деталей на технологическом оборудовании опускают захватное устройство с заготовкой и губками 13 снимают обработанную деталь с патрона, При55 этом вследствие совместного действия весов заготовки и детали манипулятор становится неуравновешенным и опускается до положения, фиксируемого огпами 19, выполненными на корпусе устройства загрузки-выгрузки деталей.1 еталь освобождается губками захватного устройства и сбрасывается внаклонный лоток, после чего манипулятор поднимается под действием противовеса, 3 ил. раничителем, установленным в пазу вертикального...
Роботизированный технологический комплекс

Номер патента: 1532148
Опубликовано: 30.12.1989
Авторы: Марченко, Новак, Попов, Романов
МПК: B21D 43/00, B23Q 7/00
Метки: комплекс, роботизированный, технологический
...крайнем нижнем положении (фиг. 4),После установки поддона с заготовками на поз. 11 и установки пустогоподдона на поз. 111 штока механизмоввыдачи и приема заготовок занимаютрабочее положение, при этом шток выдачи заготовок находится в нижнемположении, контактирующий с нижнейплоскостью стопы, другой шток, штокприема заготовок, находится в верхнемположении, готовый принять заготовку,Далее в работу включается двурукийробот, одной рукой робот извлекает заготовку из стопы на поэ. "а", другойснимает деталь со штампа, и осущест15321 1 О ЗО 35 50 55 вляется перенос деталей: деталь споз, "а" механизма поштучной выдачипереносится в зону штампа, другая -иэ эоны штампа укладывается на поз."в" механизма попггучного приема. Приэтом шток механизма...
Автоматизированный технологический комплекс по производству оребренных трубных изделий

Номер патента: 1532268
Опубликовано: 30.12.1989
Авторы: Боганский, Гапоненко, Левченко, Стоякин
МПК: B21D 53/08, B23P 15/26
Метки: автоматизированный, комплекс, оребренных, производству, технологический, трубных
...о пройденном пути и о длине участка ) процессор 3.1 получает, обращаясь также к блоку 3.2 оперативной памяти и счетчику 3.5 импульсов. В момент, когда путь, пройденный заготовкой, станет равным участку 1) , по команде процессора 3.1 снимается сигнал с третьего выхода 3.3.3 вычислительного устройства 3 и процесс сварки, осуществляемый установкой 11, прекращается. Процесс оребрения следую. ци.х участков плети и определения места расположения ребер выполняется аналогично, т. е. процессор 3. каждый очередной участок матмодели изготавливаемого изделия сравнивает с фактической величиной пути, пройденного этим изделием (который определяется на основании обработки информации, поступающей на третий вход вычислительного устройства 3 от датчика...
Технологический ротор штамповки

Номер патента: 1549789
Опубликовано: 15.03.1990
Авторы: Боровинский, Дмитриев, Панасенков
МПК: B30B 11/12
Метки: ротор, технологический, штамповки
...8 на участке 1, 1 - длина упора,Технологический ротор работает следующим образом.При вращении приводного вала с барабаном 2 и 3 и блокодержателем 4 вращаются инструментальные блоки 5. При вращенииинструменты - пуа нсон 7 и вытал киватель 8 получают осевое перемещение черезползуны 11, 12 от кулачков 9 и 10, закрепленных на станине 1.Заготовка 14 при помощи загрузочного ротора (не показан) поступает в зону штамповки инструментального блока 5. Пуансоном 7 заготовка 14 подается в матрицу 6 на выталкиватель 8. При дальнейшем осевом перемещении пуансона 7 штампуется головка заготовки 14 и пуансон 7 возвращается в исходное положение. Осевой ход пуансона 7 должен быть больше общей длины заготовки 14. Торец пуансона 7 должен при вращении...
Технологический комплекс

Номер патента: 1555125
Опубликовано: 07.04.1990
Автор: Воякин
МПК: B24B 9/18, B25J 11/00, B25J 19/00 ...
Метки: комплекс, технологический
...роликом 15 и дополнительным подпружиненным роликом 16. Рычаг 14 установлен на кронштейнах 13 шарнирно и в исходном положении с помощью пружины 17 устанавливается таким образом, чтобы поверхность ролика 15 превышала уровень роликового конвейера на 6=8 - 10 мм, а поверхность ролика 16 была на уровне конвейера (фиг. 3),Имитаторы 12 мебельных щитов представляют собой сборные текстолитовые полые щиты различной площади, по размерам, весу и шероховатости обработанной поверхности, соответствующие наиболее часто встречающимся щитам в производственных условиях. В нижней плоскости имитаторов 12 по их продольной оси выполнен паз 18, причем ширина 0 этого паза превышает диаметр ролика 16, а расстояние Е между осями роликов 15 и 16 меньше...
Технологический инструмент для волочения витых проволочных изделий

Номер патента: 1565927
Опубликовано: 23.05.1990
Авторы: Горб, Польшинский
МПК: D07B 7/00
Метки: витых, волочения, инструмент, проволочных, технологический
...и редназначены для отделения элементов изделия друг от друга при волочении и их направленной деформации, Выполнение винтовых круглых канавок с увеличением радиуса и ширины в направлении волочения позволяет согласовать изменение формы участка элемента изделия и возможность его дальнейшего передвижения в волоке, Выполнение выступов уменьшающимися в направлении волочения позволяет не препятствовать деформации каждого элемента по принятию необходимой формы,Обжатие всех прядей на участке деформации одновременно путем силового воздействия поверхностью рабочего участка канала волоки, имеющей поверхность, обратную поверхности обрабатываемого изделия, позволяет осуществлять деформацию каждого элемента в отдельности и всего изделия в...
Технологический ротор
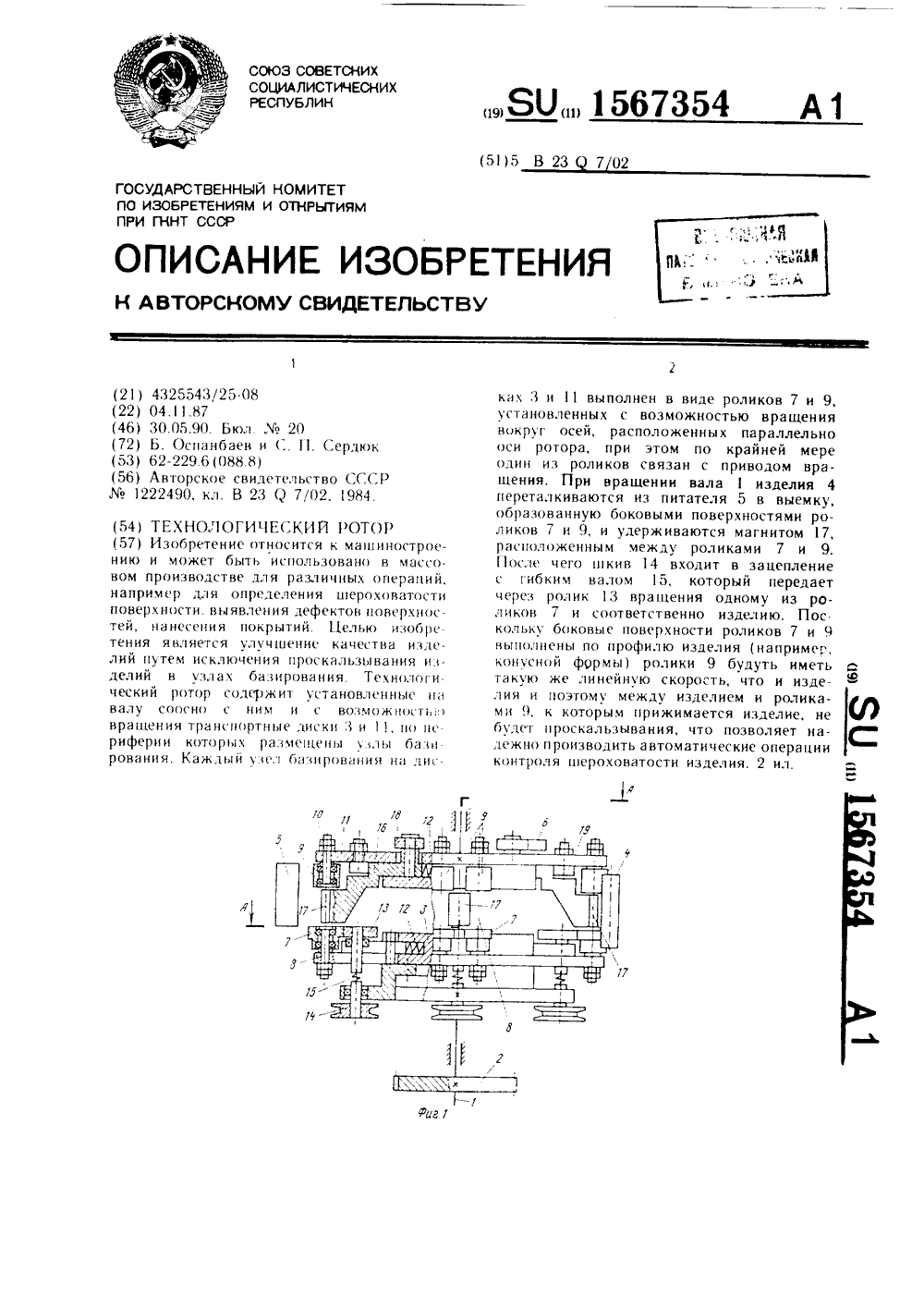
Номер патента: 1567354
Опубликовано: 30.05.1990
МПК: B23Q 7/02
Метки: ротор, технологический
...диску 3 на валу 1. Ролики 7 и 9 установлены на соответствующих осях 8 и 10 с возможнсктъю вращения вокруг последних Ролики 7 и 9 выполнены различного профиля с целью использования ротора для работы с профильными изделиями 4. Ролики 7 и 9 установлены с зазором между собой. Один из нижних роликов 7 установлен с возможностью взаимодействия с шарнирно установленным подпружиненным относительно транспортного диска 3 пружиной 12 роликами 13, который связан приводным 0)кивом 14 через гибкий вал 15. 11 риводной шкив 14 входит во фрцкционнос зацпл- ние с гибким приводныч орган)м (це показан).На транспортном диске 11 у каждого узла базирования с возможностью возвратно-поступательного перемещения в радиальном направлении симметрично...
Технологический инструмент для волочения изделий

Номер патента: 1574306
Опубликовано: 30.06.1990
Авторы: Дворжак, Коцаренко, Потапкин, Федоринов
МПК: B21C 3/02
Метки: волочения, инструмент, технологический
...ОТКРЫТИПРИ ГКНТ СССР 21) 4354675/31-02(54) ТЕХНОЛОГИЧЕСКИЙ ИНДЛЯ ВОЛОЧЕНИЯ ИЗДЕЛИЙ(57) Изобретение относится к впроизводству и может быть искачестве технологического инсволочения проволоки, прутковизобретения - увеличение пр тносится к волочильному жет быть использовано в ческого инструмента для оки, прутков и труб.ния - увеличение произ- повышение качества елий и повышение изноильного канала На фиг.1 изображен инструмент, общий вид; на фиг.2 - разрез А-А на фиг,1,Инструмент содержит корпус 1, размещенные в нем твердосплавные кольца 2 и кольца 3 из легкообрабатываемого материала, установленные между кольцами 2. В каждом кольце 3 по ширине выполнен сквозной радиальный канал и сквозной осевой канал диаметром, большим диаметра волочильного...
Технологический ротор

Номер патента: 1574429
Опубликовано: 30.06.1990
МПК: B23P 21/00, B23Q 7/02
Метки: ротор, технологический
...снабжена держателями 10 изделий 11, а звездочка 5коническими пальцами 12, Губки захватов 8 стянуты пружиной 13, Нижнееплечо рычагов 9 снабжено щупом 14,а верхнее - штырем 1 5,Технологический ротор работаетследующим образом. 30Ползуны 7 находятся в крайнем .верхнем положении, причем губки захватов8 разведены коническими пальцами 12.Изделия 11 - пишущие узлы с наконечниками 16 - подаются в ротор конвей 35ерной цепью 6 и движутся вдоль дуго.образного упора 2. При этом наконечники 1.6 прижимаются к упору 2 щупами 14, По мере опускания ползунов,7пальцы 1 2 выходят из взаимодействияс губками захватов 8, однако губкиостаются раскрытыми благодаря штырям15. Пройдя ротор, комплексные изделия 11 переносятся цепью 6 в следующий ротор. В случае...