Патенты с меткой «положения»
Датчик положения

Номер патента: 997101
Опубликовано: 15.02.1983
Авторы: Кагарманов, Ханнанов
МПК: G12B 1/00
Метки: датчик, положения
...А-А на фиг, 1,В корпусе 1 датчика, выполненномиз диамагнитного материала, установлен Ф-образный магнитопровод 2 сцентральным сердечником 3. В магии О,топроводе имеются два диаметральнорасположенных зазора, в которых расположены броневые сердечники 4 ссигнальными обмотками 5. Между броневыми сердечниками 4 установленыпостоянные магниты б, связанные15с механизмом привода 7. При этомна центральный сердечник 3 намотана управляющая обмотка 8. В корпусе 1 имеется полость 9 для размещения элементов электронной схемы,не указанных на чертеже.Устройство работает следующимобразом.На чертеже датчик показан в нейтральном положении. При перемещении 25механизма привода 7 влево или вправо постоянные магниты б перемещаются между плоскими торцовыми...
Устройство для стабилизации положения ротора синхронных машин электромеханического преобразователя частоты для объединения энергосистем

Номер патента: 997176
Опубликовано: 15.02.1983
Авторы: Есипович, Зеккель, Кощеев, Черкасский
МПК: H02J 3/06
Метки: машин, объединения, положения, преобразователя, ротора, синхронных, стабилизации, частоты, электромеханического, энергосистем
...регулятора 8, который воздействует на силовую часть системы управления приводного двигателя 2 синхронной машины 1 преобразователя.Первичные обмотки трансформаторовб и 7 подключены к шинам объединяемых энергосистем. Вторичные обмотки 40трансформаторов б и 7 соединены между собой попарно последовательносогласно и встречно, поэтому амплиту.да и фаза напряжения вторичных обмоток измерительных трансформаторов , 45соответствует амплитуде и фазе напряжений на зажимах якоря синхронныхмашин 1, подключенных к силовымтрансформаторам преобразователя 9.Принцип работы устройства заклю Очается в следующем.Приизменении угла 8 между векто"рами б( и б напряжений шин несинхронно работающих энергосистем, объединенных преобразователем...
Устройство для определения исходного положения инструмента

Номер патента: 998003
Опубликовано: 23.02.1983
Автор: Каргаев
МПК: B23C 9/00
Метки: инструмента, исходного, положения
...согласно фиг. 3) центральный стержень 12 перемещается в крайнее верхнее положение.С помощью шаблона, на номинальный размер которого от торца стола или приспособления до требуемого исходного положения инструмента 6 была рассчитана программа, опускают центральный стержень 12, который передает движение через рычаг 14 наконечнику индикатора 15. В этом положении на индикаторе устанавливают стрелку на цифре О. После этого снимают шаблон с тарели 13, которая снова перемещается в крайнее верхнее положение. На этом заканчивается настройка устройства.Настройка исходного положения инструмента по торцу (по оси У). При перемещении инструмента 6, примерно, в исходное положение и опускании его торец инструмента упирается в тарель 13 и перемешает ее...
Устройство фиксации углового положения выходного звена кинематической цепи

Номер патента: 998854
Опубликовано: 23.02.1983
Авторы: Алешин, Андронов, Козлов
МПК: G01B 7/28
Метки: выходного, звена, кинематической, положения, углового, фиксации, цепи
...статорная обмотка вращающегося трансформатора подключена к сети питания, вторая статорная обмо ка закорочена. Первая роторная обмртка вращающегося трансформатора через масштабный трансформатор 4 подключена к второй статорной обмот- ке компенсирующего вращающегося трансформатора 6, а вторая роторная обмотка - через масштабный трансформатор 5 - к первой статорной обмотке. Вторые статорные обмотки масштаб ных трансформаторов 4 и 5 закорочены. Первая роторная обмотка компенсирующего вращающегося трансформатора.б подключена к второй статорной обмотке вращающегося трансформатора 7 контролируемой цепи, а вторая роторная обмотка к первой статорной обмотке. Первая роторная обмотка вращающегося трансформатора 7соединена" с сигнальным входом...
Устройство для определения и индикации положения подвижного объекта

Номер патента: 999083
Опубликовано: 23.02.1983
Автор: Ореховский
МПК: G08G 1/12
Метки: индикации, объекта, подвижного, положения
...электрическаясхема устройства.На раме (портала) 1 фиг. 1) вагона по оси бункера 2 над шунтами 3смонтированы индуктивные датчики4-6.Устройство содержит датчики 4-6,конденсаторы 7 и 8, образующие резонансный мост 9, основной выпрямительный мост 10, выполненный на диодах 11-14, дополнительный выпрямительный мост 15, реле 16 с переключающим контактом 17 и с замыкающимиконтактами 18-20, реле 21 с переключающим контактом 22 и с замыкающимиконтактами 23-25, усилитель 26, фазочувствительный ключ 27, табло 28с сигнальными лампами 29-31, реле32 с замыкающим контактом 33, ключ34, питающий трансформатор 35,Устройство работает следующим образом.При приближении к шунту 3 датчика 4 или 5 нарушается баланс резонансного моста 9. Напряжение раэбаланса...
Устройство для контроля положения кромки материала

Номер патента: 1000365
Опубликовано: 28.02.1983
Авторы: Заблудовский, Портной, Тихомиров, Штаркман
МПК: B65H 25/26
Метки: кромки, положения
...из которых содержит фотоприемник, симметрично расположенный между двумя источниками излучения и оптическая ось которого перпендикулярна плоскости движения материала, а оптические оси фотоприемника и источников излучения каждого датчика положения кромки расположены в одной плоскости 1.Основным недостатком устройств л ся невысокая точность контроляя кромки материала. 2ремещения в направлении, перпендикулярном направлению движения материала, каждый из которых содержит фотоприемник, симметрично расположенный между двумя источниками излучения и оптическая ось которого перпендикулярна плоскости движения материала, а оптические оси фотоприемника и источников излучения каждого датчика положения кромки расположены в одной плоскости, согласно...
Устройство для определения положения числа на числовой оси

Номер патента: 1001084
Опубликовано: 28.02.1983
МПК: G06F 7/06
Метки: оси, положения, числа, числовой
...И.Выходы первого 11 и второго 12 злементов И являются выходами 16 результата сравнения устройства, выход первого элемента И 11 соединен с входомформирователя 10 импульсов, выход которого соединен со счетным входомсчетчика 8 номера поддиапазона, Выходы разрядов счетчика 8 номера поддиапазона соединены с выходами 17 номера поддиапазона устройства и входамипервого 2 и второго 3 шифраторов.Вход 13 признака окончания счетаустройства соединен с входом установ -ки триггера 9 в единичное состояние,а его единицный выход - с управляющими входами. первого 4 и второго 5 элементов сравнения,Устройство работает следующим образом.Перед началом работы на вход 14 начальной установки устройства подается сигнал, устанавливающий счетчик 1, триггер 9 и...
Устройство для сигнализации положения исполнительного механизма

Номер патента: 1001133
Опубликовано: 28.02.1983
МПК: G08B 1/08
Метки: исполнительного, механизма, положения, сигнализации
...механизм, к которому подклю.чается устройство (и самому устройст ву не относятся).устройство работает следующим образом.В случае подключения электромагнита 1 к сети постоянного тока в исходном состоянии ключ.4 разомкнут и клапан 13 закрыт, При этом .генератор 3, формирующий частоту, равную резо" нансной частоте контура 7, создает на зажимах вторичной обмотки 12 трансФорматора 10 переменное напряжение и распределяет его по замкнутой це пи: колебательный контур 7, настроенный в резонанс с частотой генератора, элемент 5, конденсатор 8 и резонансный контур 9. Клапан 13 закрыт, контур 7 находится в состоянии резо каиса и имеет высокое сопротивление. Поэтому ток в указанной цепи мал и не вызывает срабатывание элемента 5Замыкание...
Датчик положения

Номер патента: 1001140
Опубликовано: 28.02.1983
МПК: G08C 9/08
Метки: датчик, положения
...соединен с входом формирователя выходных 2 г, сигналов и с входом порогового элемента.На фиг. 1 приведена функциональная схема датчика положения; на фиг. 2 - эскиз конструктивного выполнения блока чувствительных элементов.Датчик положения содержит блок 1 чувствительных элементов, включающий в себя магнитоуправляемые контакты (МК) 2 и 3, дифференцирующую цепь 4, 3 пороговый элемент 5, формирователь 6 выходных сигналов, выполненный на триггере с первым входом 7, вторым входом 8, выводом 9 питания и выходами 10, обмотку 11 подмагничивания, 40 постоянный магнит 12,Датчик работает следуюцим образом.При движении постоянного магнита 12, например, вперед, т.е. по часовой стрелке, замыкается сначала МК 3 и подключает к источнику питания...
Устройство для выставки нулевого положения вращающегося трансформатора
Номер патента: 1001337
Опубликовано: 28.02.1983
Авторы: Королев, Слезкин, Шпакунов
МПК: H02K 15/14
Метки: вращающегося, выставки, нулевого, положения, трансформатора
...опорную плату и редуктор, корпус установлен на опорной плате с возможностью поворота относительно ведущей шестерни редуктора, расположенной в корпусе, ведомая шестерня которого соединена с валом ВТ, устройство снабжено эксцентриком со стопорным механизмом, который входит в радиальный паз, выполненный в опорной плате.На чертеже изображено предлагаемое устройство, общий вид в разрезе.Устройство включает в себя опорную35 плату 1, на которой расположен корпус 2 с возможностью поворота на малые углы, ведущую шестерню 3, смонтированную в корпусе 2 и связанную с ведомой шестерней 4, установленной на валу ВТ 5, эксцентриковый валик б, контактирующий с радйально расположенным пазом 7, выполненным в опорной плате 1, и стопорящее устройство типа...
Измеритель углового положения коленчатого вала двигателя внутреннего сгорания

Номер патента: 1002878
Опубликовано: 07.03.1983
Авторы: Бородин, Бояркин, Ивашев
МПК: G01M 15/00
Метки: вала, внутреннего, двигателя, измеритель, коленчатого, положения, сгорания, углового
...нмп ульс а. 2878 4Устройство работает следующим образом.Датчик угловых положений за один оборот коленчатого вала вырабатывает 1 импульсов угловых меток, равномерно следующих друг за другом через угол Мц 360 11 и импульс маркерной метки, следук 1 ций через угол Упосле одного из импульсов угловых меток, причем импульс угловой метки, следующий эа импульсом маркерной метки, формирует ся в момент достижения поршнем опорного цилиндра в м,т. Импульсы датчика 1, сформированные по форме и длительности формирователем 2, поступают на вход переключателя 5, При единичном значении сигнала на выходе блэка 6 строй- рования импульсы проходят на первый, а при нулевом значении этого сигнвлв - на второй выход переключателя 5.Допустим, импульс, появляющийся...
Устройство для определения углового положения ротора вентильного двигателя

Номер патента: 1003261
Опубликовано: 07.03.1983
Авторы: Десятнюк, Захаров, Родькин
МПК: H02K 29/00
Метки: вентильного, двигателя, положения, ротора, углового
...ЭДС 45вступает в работу и нелинейный преобразователь 7, -служащий для моделирования кривой намагничивания синх"ронного двигателя. На вход преобразователя 7 поступает сигнал, пропорциональный току возбуждения двигателя от ДТВ, а с выхода его - сигнал,пропорциональный значению магнитногопотока двигателя в момент определения углового положения ротора. Онпоступает на вход дифференциатора 8, 55служащего для определения изменениявеличины магнитного потока двигателя эа время измерения углового положения ротора. Продифференцированныйсигнал с выхода 8 поступает на вход 60пропорционального преобразователя 9,где он преобразуется в сигнал, пропорциональный модулю вектора ЭДСО, (совпадающего по направлениюс .прОдольнОй Осью пОлюсОв ро ора . 65(фиг....
Способ определения положения рабочего конца электрода в ванне руднотермической электропечи

Номер патента: 1003389
Опубликовано: 07.03.1983
Авторы: Величко, Гитгарц, Карманов, Ковалев, Микулинский, Покровская, Стеблянко, Ткач, Эдемский
МПК: H05B 7/00
Метки: ванне, конца, положения, рабочего, руднотермической, электрода, электропечи
...от нижней границы расплава окислов, насыщенного коксом, и проходящая через шлак, практически це- ликом будет замыкаться через металлический расплав.Полагаем, что удельное сопротивление шлака на высбте одинаковое, так как химический состав и температура практически одинаковы по высоте.На чертеже .схематически показан разрез печи по оси электрода.Способ осуществляется следующим образом.При движении электрода 1 вниз изменяет свое положение электрододержатель 2 относительно своего крайнего нижнего положения 3. Рабочий конец электрода пересекал зону 4 твердой и жидкой фаз рудных компонентов шихты, попадает в шлаковую зону 5 где нет кокса), ниже которой на ходится металлический расплав 6.Сопротивление шлака Вш при протекании тока через него...
Устройство для регулирования положения здания, сооружения
Номер патента: 1004536
Опубликовано: 15.03.1983
МПК: E02D 27/34
Метки: здания, положения, сооружения
...найти применение в ленточных, кольцевых, фундаментах или фунда.ментах с плитами большой площади. При необходимости регулирования по высоте отдельных колонн последние могут быть рассредоточены -по отдельным отсекам,, Предлагаемое устройство обеспечивает оку 4паемость затрат на устройство опорной подушки, так как гарантирует работоспособность йуправляемость конструкции; уменьшениене менее чем в 2 раза расходов на ведениепроцесса выравнивания сооружения за счетповышения надежности и исключения необходимости принудительного воздействия на опор.ную подушку, например, вибраторами или иными механическими средствами.Кроме того, предлагаемое устройство непрепятствует автоматизации процесса, так какудобно согласуется со средствами автоматики,а в...
Устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины

Номер патента: 1004550
Опубликовано: 15.03.1983
МПК: E02F 9/20
Метки: автоматической, органа, планировочной, положения, рабочего, самоходной, стабилизации
...к второму входу сумматора 2.Выходы датчиков 8 и 9 ведущих и ведомых колес через блок 10 сравнения и коррелятор 11 подключены к первому входу коммутатора 12.Устройство для автоматической стабилизации положения рабочего органа самоходной планировочной машины работает следующим образом.В идеальном случае при неизменных физико-механических свойствах грунта, когда отсутствует пробуксовка ведущих колес, скорости ведуших и ведомых колес равны и с выходом датчиков 8 и 9 скорости вращения ведущих и ведомых колес на входы блока 10 сравнения поступают равные по уровню и знаку сигналы. В результате этого на выходе блока 10 сравнения появляется нулевой сигнал, который подается на вход коррелятора 11, на выходе которого также нулевой сигнал,...
Устройство для преобразования положения меток шкалы и указателя стрелочного прибора в электрические сигналы

Номер патента: 1004931
Опубликовано: 15.03.1983
МПК: G01R 35/00
Метки: меток, положения, преобразования, прибора, сигналы, стрелочного, указателя, шкалы, электрические
...коды порядковых номеров первой и последней строк растра рабочего участка поля зрения пе. редающей телевизионной трубки 1, формирует серию строб импульсов. Последние подаются в видеоконтрольнын блок 4 для вьщеления по яркости рабочего участка поля зрения пере. дающей .телевизионной трубки 1 и на форми. рователь 8 видеосигнала,куда подводится также выходной сигнал передающей телевизион. ной трубки 1, На экране видеоконтрольного блока 4 наблюдается вьщеленный по яркости прямоугольник, В этом прямоугольнике на. ходится иэображение шкалы поверяемого при. бора 3 н частично чистое поле (без меток) шкалы с указателем, Длительность стробим. пульсов и нх количество выбирается в соответствии с временем просмотра шкалы с неко. торым запасом,...
Устройство для определения временного положения пачки импульсов

Номер патента: 1004957
Опубликовано: 15.03.1983
Авторы: Артемьев, Васильев, Прытков
МПК: G04F 10/04
Метки: временного, импульсов, пачки, положения
...(фиг. 4 б и 4 в) или совпадает с ними, т.е. 1 к Т -то напряженияОВ 4 (й) и О (й) сн.лмаемые с йервого и второго выходов коммутатора 5 опорных напряжений, соответственно принимают значенияОР (ч к-Ъ) =01Оя.(йлтк Сл Си) = А 7 8которые сохраняются до конца интервала наблюдения (фиг. 4 з, 4 и), В этом случае на первом входе блока 11 действует напряжение ОлоО 04 ,0 (фиг. 4 м, 4 л), выход интеграто-ра 9 подключен к первому входу блока 11 коммутатора 10 поскольку Оя(с).,= А.Напряжение О(й) на третьем выходе коммутатора 5 постоянное и равно нулю до момента пересечения задним фронтом Т первого импульса пачки порогового уровня (фиг. За, Зк), В момент Ц О(й) принимает значение А (фиг. Зк), которое остается постоянным до конца...
Устройство для определения положения коксовых машин

Номер патента: 1006473
Опубликовано: 23.03.1983
МПК: C10B 31/04
Метки: коксовых, машин, положения
...назначениеопределять положение подвижногообъекта с индикацией на операторскомпункте, необходимое для дистанционного управления и оперативного контроля работы коксовых машин,Наиболее близким к предлагаемомупо технической сущности являетсяустройство для определения положениякоксовых машин, содержащее последовательно соединенные датчик импульсов ведомого колеса, блок определения направления движения машины иреверсивный счетчик 2 3.25Недостаток известного устройствасостоит,в установке меток на каждойпечи, что при большом количествепечей двухбатарейного блока являетсясложной задачей. 30Если вместо меток ставить магнитные шунты, они могут деформироваться,что трудно заметить при их большомколичестве. В результате происходитсбой системы,35Целью...
Гидромеханическая система стабилизации горизонтального положения рамы дорожно-строительной машины

Номер патента: 1006643
Опубликовано: 23.03.1983
Авторы: Дягилев, Иноземцев, Новиков, Попов, Шалимов
МПК: E02F 9/22
Метки: гидромеханическая, горизонтального, дорожно-строительной, положения, рамы, стабилизации
...быть снабжен поплавком 20 дпя гашения колебаний поверхностного уровня залитой в него жидкости.Поплавок 2 установлен соосно с золот. ником 4 и выполнен из материала с малым объемным весом, например из пенопласта, или пустотелым, например из конструкцион ной пластмассы, По крайней мере в двух поперечных сечениях поплавка установлены втулки 21 и шарики 22 (фиг. 3) для снижения трений при перемещениях поплавка. В верхней части поплавка установлена опор. ная шайба 23, В центре нижней части корпуса 1 установлен винт 24, взаимодействующий через пружину 25 и опорную шайбу 26, закрепленную в поплавке 2, с хвостовиком 5 золотника 4 гидромеханической системы. В качестве узла стопорения с дистанционным управлением применен запорный элемент 27, а на...
Устройство для контроля положения поверхностей

Номер патента: 1006908
Опубликовано: 23.03.1983
Авторы: Бестужев, Бондзинский, Наумов
МПК: G01B 11/00
Метки: поверхностей, положения
...измерения пвремещениеповерхности 11 по направлению А вызывает поперечные смещения изображенийщели на диафрагмах 9 и 10. При иден 1 10069Изобретение относится к контрольно-измерительной технике и может бытьиспользовано для прецизионных измерений линейных смещений зеркально-отражающих поверхностей объектов, вчастности для контроля положения пленки в киносъемочной аппаратуре.Известны устройства для контроляположений зеркально-отражающих поверхностей, содержащие источник из Рлучения, проекционную и приемную оптическую системы, оптические оси которых расположены под углом к конт-ролируемой поверхности, и приемникизлучения 1"1 1,1Недостатком данных устройств является сложность юстировки оптическойчасти, обусловленная сложностью оптической...
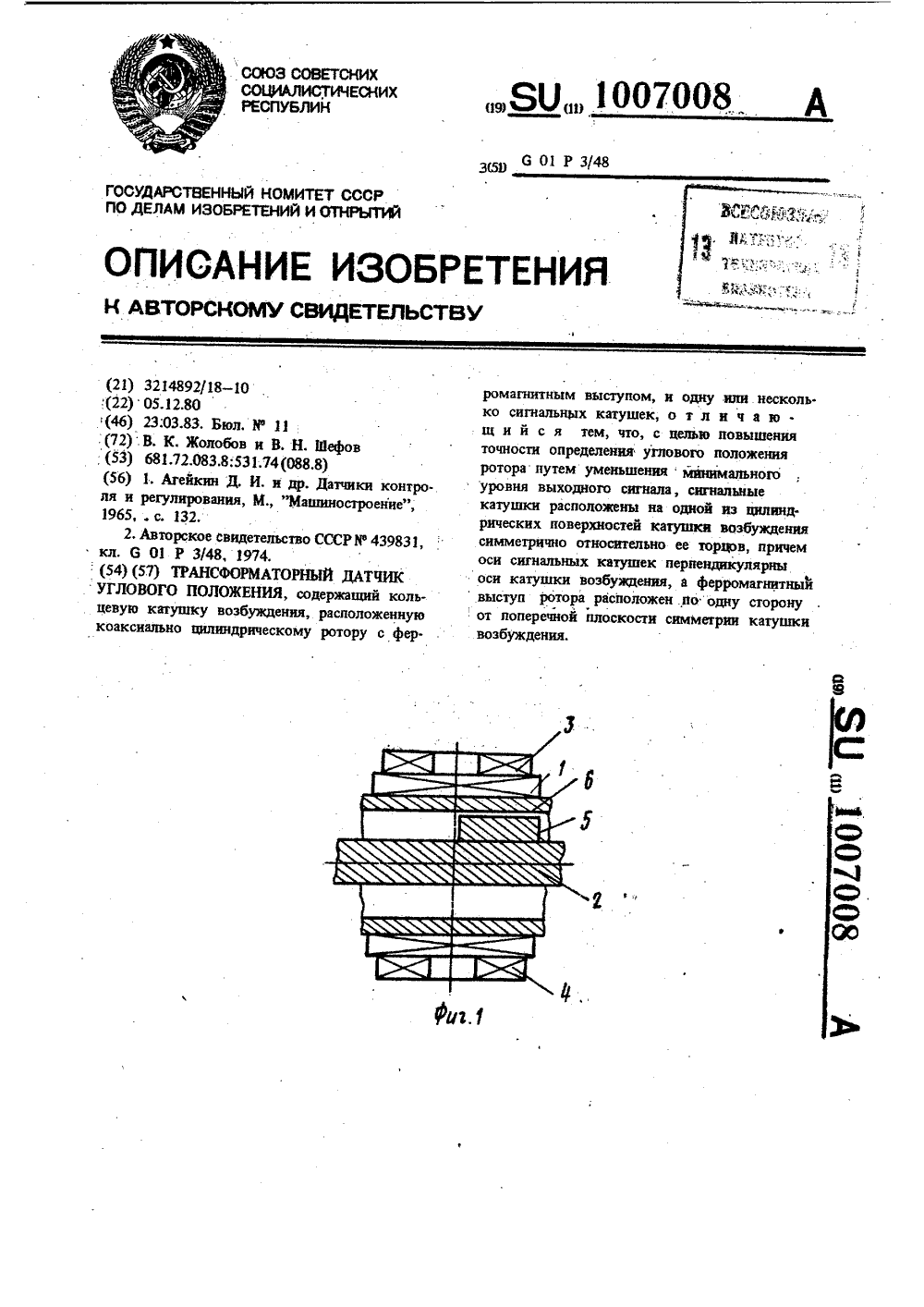
Трансформаторный датчик углового положения
Номер патента: 1007008
Опубликовано: 23.03.1983
МПК: G01P 3/48
Метки: датчик, положения, трансформаторный, углового
...цилиндрических поверхностей катушки возбуждениясимметрично относительно ее торцов, причемоси сигнальных катушек перпендикулярны40оси катушки возбуждения, а ферромагнитныйвыступ ротора расположа 1 по одну сторонуот плоскости симметрии катушки возбуждения,На фиг. 1 и 2 показана конструкция датчика; на фиг. 3 - диаграмма зависимостивыходных сигналов датчика от углового по-ложения ферромагнитного выступа ротора.Датчик содержит катушку 1 возбуждения,цилиндрический ротор 2, сигнальные катушки,например, две - 3 и 4, ферромагнитныйвыступ 5, немагнитный корпус датчика 6.Датчик работает следующим образом.Наличие ферромагнитного выступа 5 вызывает асимметрию магнитного поля, создаваемого катушкой возбуждения, В положенииротора, представленном на...
Способ стабилизации положения рабочей точки оптического модулятора и устройство для его осуществления

Номер патента: 1007073
Опубликовано: 23.03.1983
Авторы: Визнер, Есьман, Пилипович, Шматин
МПК: G02F 1/03
Метки: модулятора, оптического, положения, рабочей, стабилизации, точки
...сигналы с 30двух контрольных фотоприемников,установленных на выходах анализатора на пути лучей со взаимно Ортогональной поляризацией и стабилизируют положение рабочей точки. Испытательные сигналы подают в виде чередующихся положительных и отрицательных перепадов напряжения с ве- .личиной, равной удвоенному полувол.новому напряжению модулятОРа, а 4 Остабилизацию положения рабочей точки осуществляют по разности временныхинтервалов между последовательнымипрохождениями через положительныеи отрицательные экстремумы сигналов.В устройстве для стабилизации положения рабочей точки оптическогомодулятора, состоящем из последовательно оптически связанных лазера, поляризатора, модулятора, анализатора, первый выход которого связан с первым...
Пневматическое логическое устройство для сигнализации положения двух исполнительных механизмов

Номер патента: 1007095
Опубликовано: 23.03.1983
Автор: Келлерман
МПК: G06D 3/00
Метки: двух, исполнительных, логическое, механизмов, пневматическое, положения, сигнализации
...контроля крайних и промежуточных положений двух исполнительных механизмов.Указанная цель достигается тем, .что пневматическое логическое устройство для сигнализации положениядвух исполнительных механизмов, содер 40жащее первый, второй, третий и четвертйй распределители с механическим . управлением, каждый из которых имеет нормально открытый и нормальнозакрытый входы и один выход, связанные со штоками соответствующихисполнительных механизмов в их крайних положениях, канал питания высокого уровня 1 соединенный с нормальнозакрытыми входами второго и четвер 36 того распределителей, логическийблок, построенный на эолотниковых распределителях, и два выходных канала,снабжено каналом питания низкогоуровня, а логический блок содержитпятыи...
Устройство для контроля положения стрелочного перевода электрической централизации

Номер патента: 1008053
Опубликовано: 30.03.1983
Авторы: Большаков, Камнев, Лерман, Цыбуля
МПК: B61L 7/08
Метки: перевода, положения, стрелочного, централизации, электрической
...обмотки контрольного трансформатора, другая обмотка которого подключена к источнику питания через замыкающий контакт повторителя контрольного реле, причем один вывод обмотки контрольного реле через размыкающий контакт реверсирующего реле, контакты автопереключателя стрелочного перевода и диод соединен с одним выводом одной обмотки согласующего трансформатора, другой вывод которой соединен с другим выводом обмотки контрольного реле, а другая обмотка согласующего трансформатора подключена через другие контакты автопереключателя к источнику питания соответствующей рельсовой цепи, реле контроля нормального режима работы линейной цепи, один вывод обмотки которого соединен с одним выводом обмотки контрольного реле, другой вывод обмотки реле...
Устройство для блокировки закрытого положения вентиля

Номер патента: 1008552
Опубликовано: 30.03.1983
МПК: F16K 35/00
Метки: блокировки, вентиля, закрытого, положения
...тем,что в иэвестном устройстве, содержащем корпус, в;котором установленшпиндель с запорным органом, а также съемную рукоятку и стакан с боковыми прорезями, подвижно закрепленньЯ на корпусе, шпиндель снабженмуфтой с осевыми канавками и гайкой,перекрывающей канавки, а съемная рукоятка снабжена подпружиненными фиксаторами, установленными с возможностью взаимодействия с канавками муфты.Кроме того, с-целью обеспечениянадежного открытия вентиля, угол поцъе-.40.ма канавок в сторону открытия вентиля больше, чем в сторону закрытия.На Фиг.1 изображено устройстзо,разрез; на фиг.2 - то же,вид сбоку;на фиг.3 - резреэ А-А на фиг,2. 45Устройство для блокировки включает корпус 1 вентиля, в котором установлен шпиндель 2. На шпинделе 2 установлена...
Датчик углового положения и скорости вращения вала

Номер патента: 1008659
Опубликовано: 30.03.1983
МПК: G01P 3/489
Метки: вала, вращения, датчик, положения, скорости, углового
...55 к выходу фазового дискриминатора, при этом опорный вход цифрового измерителя сдвига Фаэ соединен с.,выходом генератора импульсов.На чертеже изображена блок-схема 60 предлагаемого датчика.Датчик содержит генератор 1,импульсов, первый счетчик 2, формирователь 3 опорных напряжений, фазовращатель 4, нуль-орган 5, первый регистр б,второй счетчик 7, управляемый ключ 8, триггер 9, формирователь 10 задержанных импульсов, второй регистр 11, Фазовый дискриминатор 12, интегратор 13, управляемый генератор 14, цифровой измеритель 15 сдвига,фаз.Датчик работает следующим образом,Импульсы с генератора 1 импульсовчврез первый счетчик 2 поступают.наформирователь 3 опорных напряжений.,где вырабатываются.напряжения питания для фазовращателя 4,...
Устройство для стабилизации горизонтального положения платформы транспортного средства

Номер патента: 1009817
Опубликовано: 07.04.1983
Авторы: Галуцких, Коденко, Нечуйвитер, Сибгатулин
МПК: B60G 19/10
Метки: горизонтального, платформы, положения, средства, стабилизации, транспортного
...16, котс рый служит для взаимной перемен- нагнетающей со сливной магистралью, зафиксирован в положении, при котором не меняется направление магистралей 14 и 15. В герметичном корпусе маятникового датчика 8 углов наклона, выполненном в виде цилиндра, корпус 17 которого заполнен жидкостью, подвешен маятник 18, опорой для которого служит пята 1 9, закрепленная на консольном кронштейне 20. Маятник 18 содержит стержень 21, на одном из концов которого закреплена рамка с конусом 22 и диском 23, на другом конце закреплен отвес 24, имеющий конусно-цилиндрическую форму. На нижней торцевой поверхности отвеса выполнены пазы 25, В пазы 25 подвижно установлены концы толкателей 26 органов 9-11 управления, которые в свою очередь...
Устройство для контроля положения железнодорожной стрелки

Номер патента: 1009866
Опубликовано: 07.04.1983
Авторы: Бреус, Зоткин, Кобзарь
МПК: B61L 7/08
Метки: железнодорожной, положения, стрелки
...контактами 7,1 и 7.2,включенными в линейные провода,Контрольное реле 10 минусового 45 положения стрелки обесточиваетсяконтактом 8.1. При этом цепь питания,управляющего реле 6 контактом 7,4 замыкается. Управляющее реле 6 своим поляризованным контактом 6.4 выключает цепь питания высокоомной обмотки управляющего реле 7, включая питание этого релепо ниэкоомной обмотке. При этом.в линейных проводах 1 и 2 протекает рабочий ток прямой полярности.Дополнительное поляризованное реле3 в цепи 11 соответствия переключает свои контакты 3.1 и 3.2 в верхнее положение, а контакты реверсивного реле 4 включают соответст вующую обмотку возбуждения электропривода 5. Стрелка начинает переводиться.После окончания перевода стрелки контакты...
Способ исправления положения здания, сооружения
Номер патента: 1010208
Опубликовано: 07.04.1983
Автор: Цыганков
МПК: E02D 35/00
Метки: здания, исправления, положения, сооружения
...соединяют с холодильной установкой, а другую, - с подогревающей установкой. Соединительныеподводящие и отводящие трубы каждойколонки подключают к одной и к другойсистеме с установкой на подключениях 60запорных кранов с тем, чтобы обеспечить подачу в колонку охлажденного,или подогретого рассола - в зависимости от требуемого режима работы колонки. До начала замораживания грунта, и при необходимости, ставят жесткие крепления (обоймы, связи и др,).После проведения необходимых испытанийначинают замораживать грунт основания подачей охлаждаемого рассола в замораживающие колонки, что обуславливает образование ледогрунтового массива вокруг и под подошвой фундамента про." севшей части. Это вызывает подъем просевшвй части сооружения под действием...
Устройство контроля положения рабочего органа экскаватора для вскрытия трубопроводов

Номер патента: 1011798
Опубликовано: 15.04.1983
Авторы: Егоров, Ерофеенко, Слуцкий
МПК: E02F 9/20
Метки: вскрытия, органа, положения, рабочего, трубопроводов, экскаватора
...схеме показан вскрываемый трубопровод 1, щупы 2 и 3 датчика положения, пружинами ч и 5 прижатые к3 1011798 4трубе 1, Каждый щуп 2 и 3 кинемати- отклонении рабочего органа в плосчески связан с двумя движками срот- кости чертежа (фиг. 1) влево щуп 2ветственно 6, 7 и 8, 9 двух пар потен и движки 6 и 7 сдвигаются вниз, ациометров 10, 11 и 12, 13. Две пары. щуп 3 и движки 8 и 9 поднимаютсяодинаковых потенциометров 10, 11 .вверх. В этом случае разность потени 12, 13 присоединены к источнику на" циалов между движками 6 и 8, измепряжения: потенциометры 10, 11 - па- ренная индикатором, 16,оказываетсяраллельно и потенциометры 12, 13. - практически равной нулю, а разностьпоследовательно, К движкам 7 и 9 под- потенциалов между движками.7 и...