Патенты с меткой «положения»
Устройство индикации положения рабочего инструмента относительно обрабатываемого изделия

Номер патента: 1338114
Опубликовано: 15.09.1987
Авторы: Вовк, Костыркин, Тихоненко
МПК: H04N 7/18
Метки: изделия, индикации, инструмента, обрабатываемого, относительно, положения, рабочего
...блока 4 наблюдается изображение обрабатываемых изделий 13, размещенных таким же образом как и в ванне 14, Положение рабочего инструмента 15 в ванне 14 определяетсяв виде кодов, соответствующих координатам Х ирабочего инструмента 15 и формируемых соответственно на выходах блока 10 определения координаты Х положения рабочего инструмента и блока 11 определения координаты 1 положения рабочего инструмента. Эти блоки представляют собой преобразователи линейных перемещений рабочего инструмента 15 в коды. Коды, соответствующие положению рабочего инструмента 15 по координатам Х иподаются соответственно на вторые входы первого блока 7 и второго блока 8 сравнения. На первые входы этцх блоков по, ают си коды координат электронного луча...
Способ определения положения стыка двух смежных заготовок перед многоклетевым непрерывным станом горячей прокатки

Номер патента: 1338913
Опубликовано: 23.09.1987
Авторы: Зельдович, Ивоботенко, Паргамотникас
МПК: B21B 38/00
Метки: горячей, двух, заготовок, многоклетевым, непрерывным, положения, прокатки, смежных, станом, стыка
...редукционными станами для стабилизации геометрических размеров и других параметров проката при непрерывной беэ интервала, т.е. встык, подаче заготовок в стан.Цель изобретения - повьппение надежности определения положения стыка.Способ реализуют следующим образом. На рольганге перед прокатным станом измеряют скорость движения и длину заготовки, скорость и текущую длину готовой трубы на выходе из стана, вычисляют приведенную к длине заготовки текущую длину готовой трубы по формуле 7 от т у ф1где Ь - текущая длина готовой трубы;тЧ и 7 - скорости движения заготовки ои готовой трубы соответственно. Вычисляют приведенную к длине заготовки длину находящейся в стане прокатываемой трубы по формуле М - число рабочих клетей станадля данного...
Устройство для коррекции показаний датчика положения нажимных устройств прокатной клети

Номер патента: 1338914
Опубликовано: 23.09.1987
Автор: Дубовец
МПК: B21B 38/00
Метки: датчика, клети, коррекции, нажимных, показаний, положения, прокатной, устройств
...синхронизируется с тактовыми импульсами. Синхронизация выполнена на двух Р-триггерах 8 и 9 и первом элементе И 10.Первый Р-триггер 8 управляется тактовыми импульсами ТИ 2, а второй Р-триггер 9 - тактовыми импульсами ТИ 1. Эти импульсы на выходах генератора 1 тактовых импульсов сдвинуты относительно друг друга на 1805 10 15 20 25 30 35 40 50 55 Первый П-триггер 8 включается только в случае, .если задний фронт импульса ТИ 2 наступает позднее первого фронта импульса с выхода второго нуль-органа 7.При одновременном поступлении фронтов возможна попытка включения второго П-триггера 9. Однако в этом случае получаемый узкий импульс с выхода первого П-триггера 8 не переца- ется дальше. Если первый Р-триггер 8 включается, то при поступлении...
Устройство для стабилизации горизонтального положения платформы транспортного средства

Номер патента: 1339038
Опубликовано: 23.09.1987
Авторы: Коденко, Краснопольский, Нечуйвитер, Сибгатулин
МПК: B60G 19/10
Метки: горизонтального, платформы, положения, средства, стабилизации, транспортного
...4 относительно корпуса 6, т.е. наклона ее а продольной и поперечной плоскостях, выступы 8-10 получили различные перемещения д Л 2, д как по величине, так и по направлению, Эти перемещения вызовут и соответствующие замыкания контактов 12-17 трех переключателей 11.При перемещении выступа 8 в направлении, показанном на фиг.2, когда 1 ( д ( 1 , размыкаются контакты 151 1 2 фи 16, реле 19 обесточивается, контакт 23 замыкается. Цепь реле 20 подготовлена, При дальнейшем увеличении перемещения д, замыкаются контакты 16 и 17. При этом на реле 20 подается напряжение питания, контакты 24 и 25 замыкаются. Контакт 24 служит для блокирования контактов 16 и 17, вибрации которых не вызывают отпускания реле 20. Через контакт 25 напряжение питания...
Способ “рега” контроля параметров регистрирующей среды в процессе определения положения фокальной плоскости

Номер патента: 1339642
Опубликовано: 23.09.1987
Авторы: Арлеевская, Плетнев, Тетерис, Шварц, Шугаев
МПК: G11B 7/24
Метки: параметров, плоскости, положения, процессе, рега, регистрирующей, среды, фокальной
...регистрируошей среды происходит только в моменты ее пересечения фокальной плоскостью сфокусированного излучения. При условии обеспечения пороговых значений интенсивюсти и энергетической освещенности на движущейся регистрирующей среде формируется последовательность участков б регистрации диаметром х (фиг. 2). Г 1 ри равномерном движении регистрирующей среды одинаковые расстояния ежду участками регистрации соответствуют положению оптимальной фокусировки излучения, когда колебания фокальной плоскости симметричны относительно плоскости регистрирующей срелы. При этом расстояние . между участками регистрации зависит от линейной скоростидвижения регистрирующей среды и от периола колебаний фокальной плоскости Т (Т= - ). Так как излу ение за...
Способ определения положения энергетического центра зоны с неравномерной освещенностью

Номер патента: 1341497
Опубликовано: 30.09.1987
Автор: Кофман
МПК: G01B 21/00
Метки: зоны, неравномерной, освещенностью, положения, центра, энергетического
...(фиг.1),для которой выполняются следующиеусловия:Х=М 1-Ь; (1) м 1 -К97 2где 1 - длина одного фоточувствительного элемента ЛФВС 1;М - номер фоточувствительногоэлемента;- часть М-го элемента, величинакоторой определяется из условия (2)ру - выходной сигнал с 1-го фоточувствительного элементаЛФВС 1, характеризующий егоосвещенность;ум - выходной сигнал с М-го элемента;Б - общее число элементов ЛФВС 1.Подставляя величину ь из выражения (2) в выражение (1), получают м иОбозначая в (3), у, =Бм,У; =с= :=Б, получают соотношение Бм-Б/2Х= (М - -ф -- ) 1, (4)УмС выхода видеопроцессора 2 составляющие видеосигнала поступают на АЦП 3, где преобразуются в цифровые значения у; (1=1,2 И), где И - число фоточувстительных элементов ЛФВС 1 (фиг 2), каждое из...
Способ определения положения центра масс изделия

Номер патента: 1341506
Опубликовано: 30.09.1987
Авторы: Бердинских, Гнедой, Нев
МПК: G01M 1/10
Метки: изделия, масс, положения, центра
...может быть использовано дляопределения положения центра массизделия, опирающегося на гидростатические опоры,Цель изобретения - упрощение способа путем исключения операций поизмерению нагрузки на опоры изделияспециальными средствами, 10На чертеже приведена схема устройства для реализации способа определения положения центра масс изделия.Устройство для реализации способаопределения положения центра масс иэделия содержит основание 1, размещенное на нем изделие 2, опирающеесяна три гидростатические опоры 3. Жидкость в полость каждой опоры 3 подается из магистрали через дроссели4 с регулируемым проходным сечением,давлейие жидкости в полости контролируется манометрами 5. Способ определения положения цент ра масс изделия реализуется следуюЩим...
Устройство для контроля положения бабы молота

Номер патента: 1342573
Опубликовано: 07.10.1987
Авторы: Коган, Непомнящий, Охотников, Товпыга, Фомин, Храмой
МПК: B21J 7/46
Метки: бабы, молота, положения
...триггера 29 второго каналасоединен с Р-входом триггера 30 ивторым входом схемы ИЛИ 31, выходтриггера 30 и выход схемы ИЛИ 31 под 5ключены к выходу 1 и входу С счетчика 21.Устройство работает следующимобразом.При движении бабы молота пазы 1и перемычки 2 задатчика перемещенийперемещаются вблизи чувствительныхэлементов 4 - 6, при этом ролики находятся в контакте с поверхностью Ббабы и вращаются будучи поджаты кней усилием пружины 16 через каретку7, ось 1 О и рычаг 11. При разворотебабы в вертикальной плоскости каретка 7 разворачивается вместе с нейвокруг оси 10. Предварительное поджатие пружины 16 обеспечивается перемещением упора 17 по стержню 15 так,чтобы при максимальном удалении поверхности Б бабы от кронштейна 13ролики 8 были...
Устройство для определения положения транспортного средства

Номер патента: 1343393
Опубликовано: 07.10.1987
Авторы: Игнатьев, Петров, Сорокин
МПК: G05D 1/00
Метки: положения, средства, транспортного
...в них сигналов обратно пропорциональны квадрату расстояния между датчиками и индукционными проводами, Коэффициент пропорциональности зави птот конструктивных особенностей датчиков, величины и частоты тока, протекающего по индукционному проводу иможет считаться неизменным для каждого индукционного датчика в пределах конкретной транспортной сети но неизвестным по величине, Поэтому (фиг,2)Ц.К,Н 2 (1) напряжение, ицдуцирусмоев -м индукционном датного датчика;смещение 1.-го индукциоцного датчика относительноиндукционного провода пооси у(х);высота расположения д-гоиндукционного датчика относительно поверхности движения транспортного средства;Ь - глубина прилегания индукционного провода.Индукционный провод прокладывается на одинаковую глубину...
Регулятор положения рабочей поверхности

Номер патента: 1344977
Опубликовано: 15.10.1987
Автор: Захаревич
МПК: F16C 32/06
Метки: поверхности, положения, рабочей, регулятор
...составляющая силы веса золотника 3. Под действием этой силы золотник 3 начинает перемещаться влево по карманам 5 и 6 в полость 22, При этом длина входной перемычки в левую питающую полость уменьшается, а в правую - увеличивается. При этом расход рабочей среды в левую выравнивающую опору 14 возврастает, а в правую 15 уменьшается. Под действием избыточного давления равновесие между силой веса, приходящейся на левую опору 14, и силой давления в ней нарушается (сила давления превысит вес), и левая опора начинает удлиняться, а правая - опускаться. Сливное сопротивление дросселя 28 при этом уменьшается, а дросселя 29 - увеличивается. И так происходит до тех пор, пока между сопротивлениями (Ь, и 28; Ь и 29) не установится определенное...
Индуктивный датчик положения ротора

Номер патента: 1346947
Опубликовано: 23.10.1987
Авторы: Михайлов, Омельченко, Петров, Путников, Уваров
МПК: G01D 5/20
Метки: датчик, индуктивный, положения, ротора
...напряжения выходных транзисторов датчика.На чертеже приведена электрическая схема индуктивного датчика положения ротора. 15Индуктивный датчик положения содержит установленный на роторе посто. янный магнит 1, дроссели 2 и 3 насыщения с замкнутыми магнитопроводами, постоянный магнит 4, согласующии . 20 трансформатор 5, резистор 6, обмотку 7 питающего трансформатора преобразователя повышенной частоты (не показан), Фазочувствительный демодулятор 8, содержащий диод 9, транзистор 10, обмотку 11 преобразователя повышенной частоты, выпрямительный мост 12, конденсатор 13, резистор 14, диоды 15 и 16, силовые транзисторы 17 и 18, транзисторы 19 и 20 и резисторы 21 и 22. При этом начало первичной обмотки согласующего трансформатора 5 через...
Способ определения положения сварного шва и устройство для его осуществления

Номер патента: 1348109
Опубликовано: 30.10.1987
МПК: B23K 9/10
Метки: положения, сварного, шва
...точки 33, в которой измерительный пуч 11 пересекает переднюю Фокальную плоскость 31 объектива 21, Согласно изобретению, чтобы получить оптимальную Фокусировку точек, расположенных на протяжении луча 11, линейный Фото- приемник 22 должен лежать луче 38.раз 39 кба". .: ц с; азата,цых1( те к у щх ) тч и.,з х а д ч ц;х с я м е ,ут яками 24 и 25 т.е.дизп;зоне из. ерецця рзсст яццг, ьр;т, руетсяоднозначно нз 1 инейцам отоприемцике22, 1 окусировзнцое расстояние 1, доштифа 17 дает л гка рззграцичимьй импуьс 40, соответствующий нулевомурадиус,-вектору 16, В оптическую систему да"чика мажет вхдить элемент суправлчемой снетогроцицземостью 41(например, затвор Ееррз), работающийс импудь ным излучателем 18,Примерная форма сигнала датчикара.стоция 10...
Способ измерения положения объекта

Номер патента: 1348644
Опубликовано: 30.10.1987
Авторы: Баклушин, Давидчук, Суханов
МПК: G01B 21/00
Метки: объекта, положения
...этом первый 10.1 и второй 10.2 накапливающие сумматоры обнуляются, в счетчик 10.8 записывается единица, генератор 9 синхрониэируется и вырабатывает импульсы, период которых меньше периода опроса фотоприемника. Эти импульсы поступают на тактовые входы блока 10.6 управления сумматором и блока 10.7 управления счетчиком. Блок 10.7 управления счетчиком разрешает прохождение импульсов, поступающих на его тактовый вход, на счетный вход счетчика 10,8Блок 5 управления фотоприемником периодически опрашивает фотоприемник4 на выходе которого формируются видеосигналы, огибающая которых пропорциональна распределению освещенностив иэображении диафрагмы 2,5Сигналы, снимаемые с фотоприемника 4, поступают на вход блока 6 выборки, осуществляющего...
Устройство телеконтроля положения сетевого коммутационного аппарата

Номер патента: 1350755
Опубликовано: 07.11.1987
МПК: H02J 13/00
Метки: аппарата, коммутационного, положения, сетевого, телеконтроля
...из известных устройств,Для фиксации увеличения тока,увеличения и уменьшения емкости сети вкачестве блоков 10, 12 и 13 могутиспользоваться дифференцирующие устройства, например дифференцирующиеБС-цепи.На выходе блоков 10, 12 и 13 отсутствуют сигналы об увеличении токаи изменении емкости сети, поэтомуотсутствует сигнал на выходе блока 20,который является выходом устройства.При включении пункта АВР возрастает ток в контролируемой линии и увеличивается длина электрически связанных линий 10 кВ, так как сети резервирующей подстанции подключается резервируемая линия, Поскольку емкостисети 10 кВ относительно земли практически пропорциональна длине электрически связанных линий 10 кВ, то одновременно увеличивается емкость сети.Это...
Устройство для стабилизации прямолинейного движения и изменения положения на заданной траектории осей транспортного средства (его варианты)

Номер патента: 1351514
Опубликовано: 07.11.1987
Автор: Роберто
МПК: B62D 5/06
Метки: варианты, движения, его, заданной, изменения, осей, положения, прямолинейного, средства, стабилизации, траектории, транспортного
...усилия, создаваемые нагружающим устройством 4, будут больше внешних усилий, действующих на управляемые колеса 2 и пружина 12 2удерживает колеса 2 в положении прямолинейного движения.При работе гидроцилиндра 1 управляемые колеса 2 поворачиваются, перемещая шток 6 в соответствующую сторону, что приводит к сжатию пружины12 посредством движения одного изстаканов 9 и 10 внутрь корпуса 5 принеподвижном другом стакане. Это приводит к созданию стабилизирующегоусилия, обеспечивающего возврат колес2 в положение прямолинейного движения при снятии воздействия на органрулевого управления.Устройство для стабилизации прямолинейного движения и измененияположения на заданной траекторииосей транспортного средства по второму варианту выполнения...
Устройство для определения положения размерообразующего зуба многолезвийного инструмента

Номер патента: 1351711
Опубликовано: 15.11.1987
МПК: B23B 25/06
Метки: зуба, инструмента, многолезвийного, положения, размерообразующего
...касания возникающая сила трения между зубом и роликом преодолевает усилие натяжения пружины, в результате чего размыкается электрический контакт, в устройство ЧПУ станка поступает сигнал о касании (в непродолжительный по времени момент преодолевания усилия натяжения пружина 9 оказывает отрицательное действие - положение 11, фиг,4), а рычаг 1 поворачивается на оси 10, перемещая шток 8 в правое положение и сжимая пружину 9, При дальнейшем повороте рычага 1 пружина 9 создает усилие (действие составляющих пружины приведено на фиг.4, позиция 111), действующее в том же направлении, что и вектор скорости перемещения рычага, в результате чего осуществляется быстрый увод ролика от поверхности зуба (в данном случае пружина оказывает полезное...
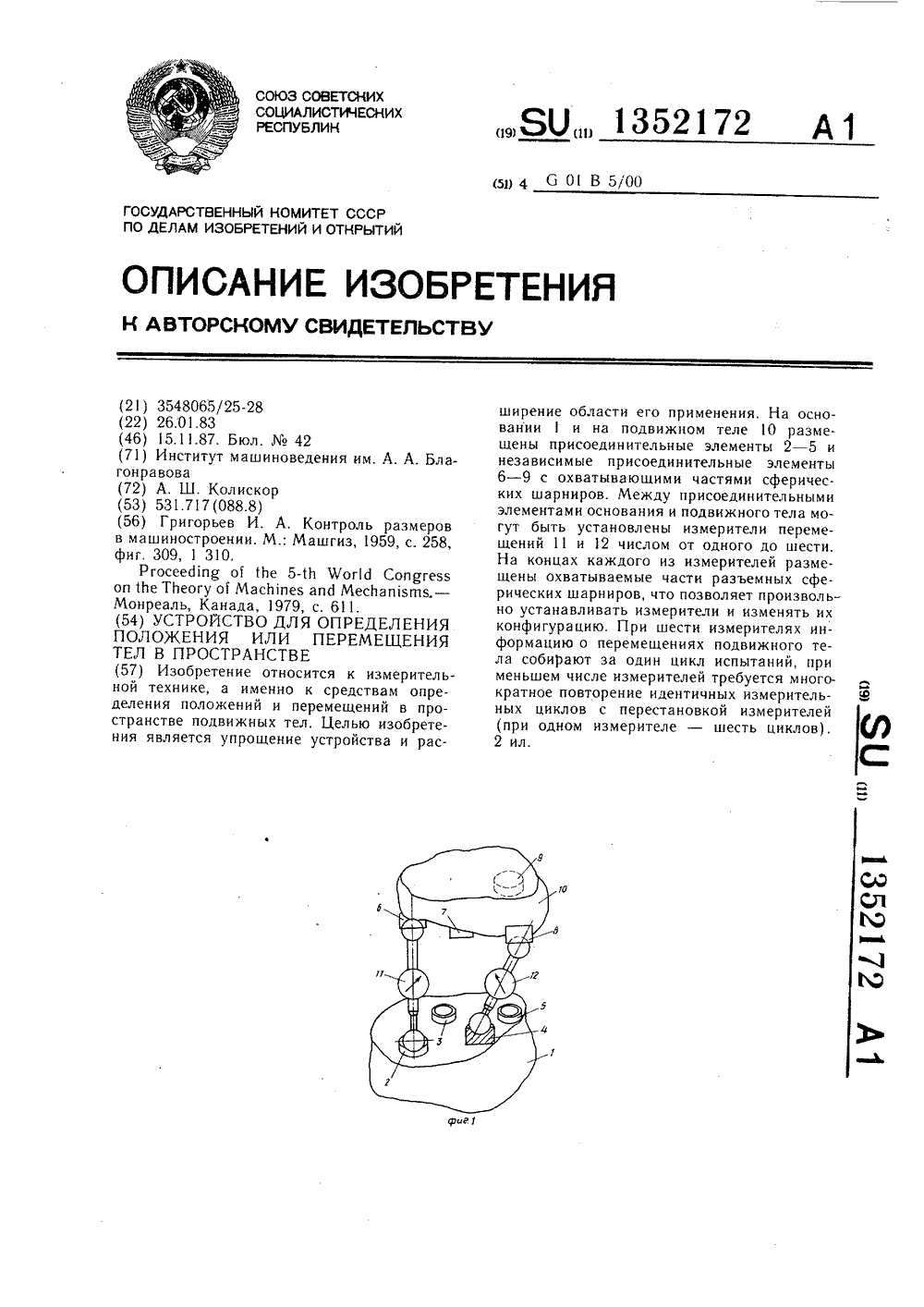
Устройство для определения положения или перемещения тел в пространстве
Номер патента: 1352172
Опубликовано: 15.11.1987
Автор: Колискор
МПК: G01B 5/00
Метки: перемещения, положения, пространстве, тел
...присоединительные элементы 2 - 5 (возможно и большее число присоединительных элементов). Кроме того, в комплект устройства входят несколько независимых присоединительных элементов 6, 7, 8и 9, которые предназначены для закрепления на контролируемом объекте (подвижномтеле 10). Между присоединительными элементами основания и подвижного тела 10установлены измерители 11 и 12 перемещений, число которых не менее одного. Каждыйиз измерителей 11 и 12 (фиг. 2) выполнен в виде раздвижной штанги, состоящей из двух частей 13 и 14 и измерителя 15 раздвижения этих частей, На концахраздвижной штанги смонтированы охватываемые части 16 и 17 разъемных сферических шарниров, Ответные (охватывающие)части сферических шарниров размещены вприсоединительных...
Устройство для измерения положения тел в пространстве

Номер патента: 1352192
Опубликовано: 15.11.1987
Автор: Головин
МПК: G01B 7/30
Метки: положения, пространстве, тел
...содержит датчики 1 и 2 пространственного положения объектов (феррозонды) с обмотками возбуждения и измерения, Обмотки возбуждения датчиков соединены с генератором 3 опорной части. Измерительные обмотки датчиков соединены последовательно соответственно с активными фильтрами 4 и 5, и фазочувствительными выпрямителями 6 и 7. Выходы выпрямителей 6 и 7 подключены к входу регулятора 8 начального положения объектов, выходы которого подключены к входам сравнивающего элемента 9, выход которого соединен через согласующий блок 10 с индикатором 11.Устройство работает следующим образом, Датчики 1 и 2, закрепленные на объектах, возбуждаются генератором 3 опорной частоты, Напряжения второй гармоники сигнала с измерительных обмоток датчиков,...
Рецепторный датчик положения обучаемой системы управления

Номер патента: 1352456
Опубликовано: 15.11.1987
МПК: G05B 19/08
Метки: датчик, обучаемой, положения, рецепторный, системы
...на всеисполнительные органы в любом положении датчика. Обучение многократноеЕсли в процессе обучения окажется,что сигнал управления каким-либо исполнительным органом мал (допустим,скорость этого органа мала), обучатель подает дополнительный импульсзаписи на разрядную шину той парыразрядных шин ПЗУ, которая связана сданным исполнительным органом, Практически это осуществляется нажатиемтой кнопки 16 пульта обучения 10,которая замкнет формирователь 15 импульсов записи на соответствующую разрядную шину 7. Усилие нажатия определитмощность импульса. Импульс записипойдет только через те элементы памяти 14 ПЗУ, со строчными шинами которых в данном положении через рецепторы 5 контактирует подвижная. головка 1, В результате...
Устройство для контроля пространственного положения объектов

Номер патента: 1352464
Опубликовано: 15.11.1987
Автор: Цуккерман
МПК: G05D 1/08
Метки: объектов, положения, пространственного
...луча при наводкеустройства на приемный пункт каждыйиз объективов снабжен окуляром 8 ссеткой 9 и включаемым в ход лучейзеркалом 10 с регулируемым упором 11,На фиг,2 и 3 показан вариант устройства, в котором левая разделительная призма заменена на установленный.за щелевой диафрагмой 14 и светофильтром 15 фотоприемник 13, образующий вместе с правым объективом приемный пункт. Фотоприемник 13 соединен с электронной схемой, состоящейиз предусилителя 16 блока 17 фильтров, компаратора 18 и выходного усилителя 19 (заимствованной иэ ПУЛ-Н).Выходы из усилителя 19 могут бытьиспользованы как для автоматическойнаводки правого объектива на аналогичную биаксиальную систему, так идля визуалькой индикации,Работа устройства происходит следующим...
Устройство фиксации временного положения максимума сигнала

Номер патента: 1352628
Опубликовано: 15.11.1987
Авторы: Александров, Гуисов, Симаков, Шипулина
МПК: H03K 5/19
Метки: временного, максимума, положения, сигнала, фиксации
...является производной от входного сигнала. В качестве нелинейного элементаиспользуется квадратор. Таким образом, на выходе нелинейного элемента 2 формируется сигнал, равный квадрату входного сигнала.С выхода элемента 2 сигнал Хг (фиг. 2 а) подается на первые входы блока 3 выборки-хранения и компаратора 4. На второй вход компаратора 4 поступает сигнал Х (, ) - предыдущий максимум, записанный в блоке 3 (фиг,2 о), Как только в момент времени 1:, Х (1 )г-1 и превысит Х И ., )(Фиг.2 о) - текущий максимум больше предыдущего, на выходе компаратора 4 сформируется высокий уровень напряжения (фиг,2 ф), который в момент времени Сг через блок 28 25 задержки поступает на второй входформирователя 6 (фиг. 2 у), разрешаяформирование сигнатуры...
Устройство для измерения временного положения импульсов

Номер патента: 1354157
Опубликовано: 23.11.1987
Авторы: Захаров, Маршаков, Трифонов
МПК: G04F 10/00
Метки: временного, импульсов, положения
...этого согласованного фильтра всегда при отсутствии аддитивного шума п(г.) имеет максимум в момент времени 0 + С . Наличие адитивного широкополосного шума п(Г) приводит к смещению этого максимума относительно точки+ 7 . Это сме 0 Ищение может быть большим, чем смещение максимума выходного сигнала с выхода первого квадратора 3 х (с),из-эа появления на входе согласованного фильтра 6 перекрестных помех типа произведения сигнала на шум при возведении х (С) в квадрат. Поэтому, если бы аддитивный шум на входе отсутствовал или имел бы достаточно малый .уровень, то измерения временного положения импульса (1) можно было бы проводить на основе определения максимума сигнала х (С).Сигнал х(г.), пройдя через инвертор 7, суммйруется с сигналом х (С) в...
Устройство для контроля положения штрихов лимбов

Номер патента: 1355867
Опубликовано: 30.11.1987
Авторы: Бальсис, Кузмицкас, Стейкунас, Ушинскас
МПК: G01B 21/00
Метки: лимбов, положения, штрихов
...микроскопом 9 на основ 67 2ной Фотоприемник 11, установленныйна линейке 17,Поворотом линейки 17 устанавливают изображение штриха образцовоголимба 1 в положение, при которомсигнал, снимаемый с дифференциальнойпары фоторезисторов, образующих основной фотоприемник 11, становитсяравным нулю. Ось симметрии дифференциальной пары фоторезисторов, образующих основной Фотоприемник 11,перпендикулярна направлению движения линейки 17.Изображение штриха поверяемоголимба 2, освещаемого источником 8света, входящим в узел 6 считывания,проецируется микроскопом 10 на линейку 17, на который установленыосновной и вспомогательные Фотоприемники 12- 16, выполненные в виде дифференциальных Фоторезисторон.Под воздействием сигнала управления, формируемого...
Устройство для измерения временного положения импульсов

Номер патента: 1357911
Опубликовано: 07.12.1987
МПК: G04F 10/00
Метки: временного, импульсов, положения
...импульса и аддитивного широкополосного шумя п(С) лишь тем, что в сигнале на выходе полосового фильтра 1 подавлены все спектральные составляющие шума п(С), лежащие вне полосы частот ", -Я/2; Я 21, и амплитуда изменена в Краз, Усилитель 2 имеет коэффициент усиления К и на его выходе снимается сигнал х(С)= Кх(С) (фиг, 2). Сигнал с выхода усилителя 2 в сумматоре 4 суммируется с выходным сигналом квадратора 3 (Фиг 3), в результате чего формируется сигнал (фиг. 4)хЗ(С) ( ) 1( (3) который поступает на вход согласованного фильтра (интегратор 5, блок б и линия 7 задержки) для прямоугольного импульса длительностью 2, формируемый согласованнным фильтром сигнал (выход блока б вычитания)=х )-х ,1-" 1 И (4)при отсутствии аддитивного широкополосного...
Импульсный регулятор положения пьезодвигателя

Номер патента: 1357915
Опубликовано: 07.12.1987
МПК: G05B 11/16
Метки: импульсный, положения, пьезодвигателя, регулятор
...Ф;- ток, протекающий через пьезодвигатель, А;- время, с;30 е " падение напряжения на датчике, В;Ь - индуктивность датчика, Гн;- ускорение пьезодвигателя,м/сИз приведенных соотношений видно, 35что падение напряжения на датчике 6производной тока пропорционально ускорению пьезодвигателя ", Падениенапряжения на датчике производнойтока е подается на вход интегрирующего контура 5, который выполняетдве функции.где 1 - максимальное значение тока,протекающего через пьезодвигатель 7, А;- напряжение источника питания, В;- индуктивность датчика б, Гн;С - емкость пьезодвигателя 7, Ф,Последовательно соединенные датчик производной тока и пьезодвигатель представляют собой фильтр высокой частоты. Частота генератора 2 опорной частоты фильтруется...
Измеритель положения вала

Номер патента: 1359661
Опубликовано: 15.12.1987
Авторы: Косач, Панов, Турченков, Худобин
МПК: G01B 7/30
Метки: вала, измеритель, положения
...на оба входа логического элемента ИЛИ 7 подается напряжение, соответствующее логическому 110", и навыходе этого элемента будет сформирован задний фронт положительногоимпульса, Как только начнется уменьшение напряжения (по абсолютной величине) с генератора 1 и сработаеткомпаратор 3, на входе элемента ИЛИ7 вновь появится напряжение, соответствующее логической "1", и на выходе элемента ИЛИ 7 и входе преобразователя 5 будет сформирован передний фронт импульса, длительность которого и является длительностью инфдрмационного импульса.Чем больше будет (по абсолютнойвеличине) напряжение с выхода датчика 1 положения, тем длиннее информационный импульс.Р-триггер 6 переключается при появлении на его С-входе переднегофронта положительного импульса...
Способ дистанционного определения пространственного положения плоскости

Номер патента: 1359674
Опубликовано: 15.12.1987
Автор: Меркишин
МПК: G01B 21/04
Метки: дистанционного, плоскости, положения, пространственного
...которые пропорциональны расстоянию между первым и вторымотражателями вдоль направления прихода отраженных сигналов,Аналогично в регистрах 16, 22 и18, 24 фиксируются расстояния пропорциональные частотам составляющих,соответственно, средней и слабой .гармоник по этим осям.В регистрах 17, 23 и 19, 25 фиксируются фазы составляющих, соответственно, средней и слабой гармоникпо осям линеек 6 и 7 соответственно, которые пропорциональны расстоянию, соответственно, между большими малым, средним и малым отражателями вдоль направления прихода от-,раженных сигналов,К выходам регистров 15 и 21, 17и 23, 19 и 25 подсоединены блоки 26,27 и 28 сравнения, соответственно,в которых происходит сравнение фаз,зафиксированных в этих регистрах.Если фазы...
Устройство для выбора режима автоматического регулирования положения навесного орудия

Номер патента: 1360613
Опубликовано: 23.12.1987
Авторы: Кузнецов, Муравлев, Носенко, Савенко
МПК: A01B 63/11
Метки: выбора, навесного, орудия, положения, режима
...- Б на фиг. 1; на фиг. 4 - разрез В - В на фиг. 1.Устройство для выбора режима авточагпчсского регулирования положения навесного орудия содержит втулку 1 с пазом, закрепленную на валу золотника регулятора (не показан), рычаги силового 2 и позиционного 3 регулирования, связанные с соответствуюгцими датчиками (не показаны), суммирующий рычаг 4, установленный на оси, выполненной в виде винта 5, и пластину 6 с пазом, взаимодействующую с рычагами 2 и 3. Винт 5 размещен во втулке 1, а суммирующий рычаг 4 - в пазах втулки 1 и пластины 6.Предлагаемое устройство работает следующим образом. При силовом регулировании суммируюший рычаг 4 перемешается в крайнее правое положение (по чертежу) вращением винта 5 и располагается рядом с рычагом 2 силового...
Способ выбора положения оператора перед экраном системы отображения информации
Номер патента: 1360731
Опубликовано: 23.12.1987
Авторы: Грин, Медина, Чернюк, Щербатюк, Яловенко
МПК: A61F 9/04
Метки: выбора, информации, оператора, отображения, положения, системы, экраном
...эпизодически возникающие источники внеп;него освещения, изменяющие свое положение по отношению к экрану. Свет от имитаторов источников освещения направляют на экран под различными углами, соответствующими взаимному расположению источника и экрана в реальных условиях. Измеряют предельные значения углов а, и афиг, 1) между направлением на имитируемый источник освещения и плоскостью экрана.При значениях а,. меньших угла ср= образованного плоскостью 2исключением его части, ограниченной несов. падающими с плоскостью экрана сторонами углов а и а, отсчитанными со стороны оператора, при этом с и 1 - соответственно диаметр проволоки сетки и расстояние между двумя ближайшими проволоками сетки. Способ выбора положения оператора перед...
Способ контроля положения объекта, перемещаемого из начального положения в конечное, и концевой выключатель

Номер патента: 1362696
Опубликовано: 30.12.1987
Авторы: Блюмин, Брескер, Глузберг, Ходорковский
МПК: B65G 47/46, B65G 61/00
Метки: выключатель, конечное, концевой, начального, объекта, перемещаемого, положения
...1.-образные рычаги 10повернутся и шунтируюшая пластина 9 опустится в паз 14 датчика 5.Для реализации способа к пластине 9перед пазом 14 и на уровне паза 14 укреплен флажок 16, и в электроблок бвведен элемент 17 памяти, который зафиксирует поступление кратковременногопроходного сигнала от датчика 5,Устройство работает следующим образом.В начале выдвижения платформы 4 рамы 2 флажок 16 пластины 9 проходитсквозь паз 14 концевого выключателя 1,который выдает кратковременный сигнал вэлектроблок 6. Последний фиксирует этотсигнал элементом 17 памяти.Этот сигнал свидетельствует об исправности датчика при контроле данной ситуации.В последующем, если шуп 8 встречаетпрепятствие, например препятствие 15, тогдаподается продолжительный сигнал на...