Устройство для программного управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1070511
Авторы: Землянский, Кибальников, Широкоступ
Текст
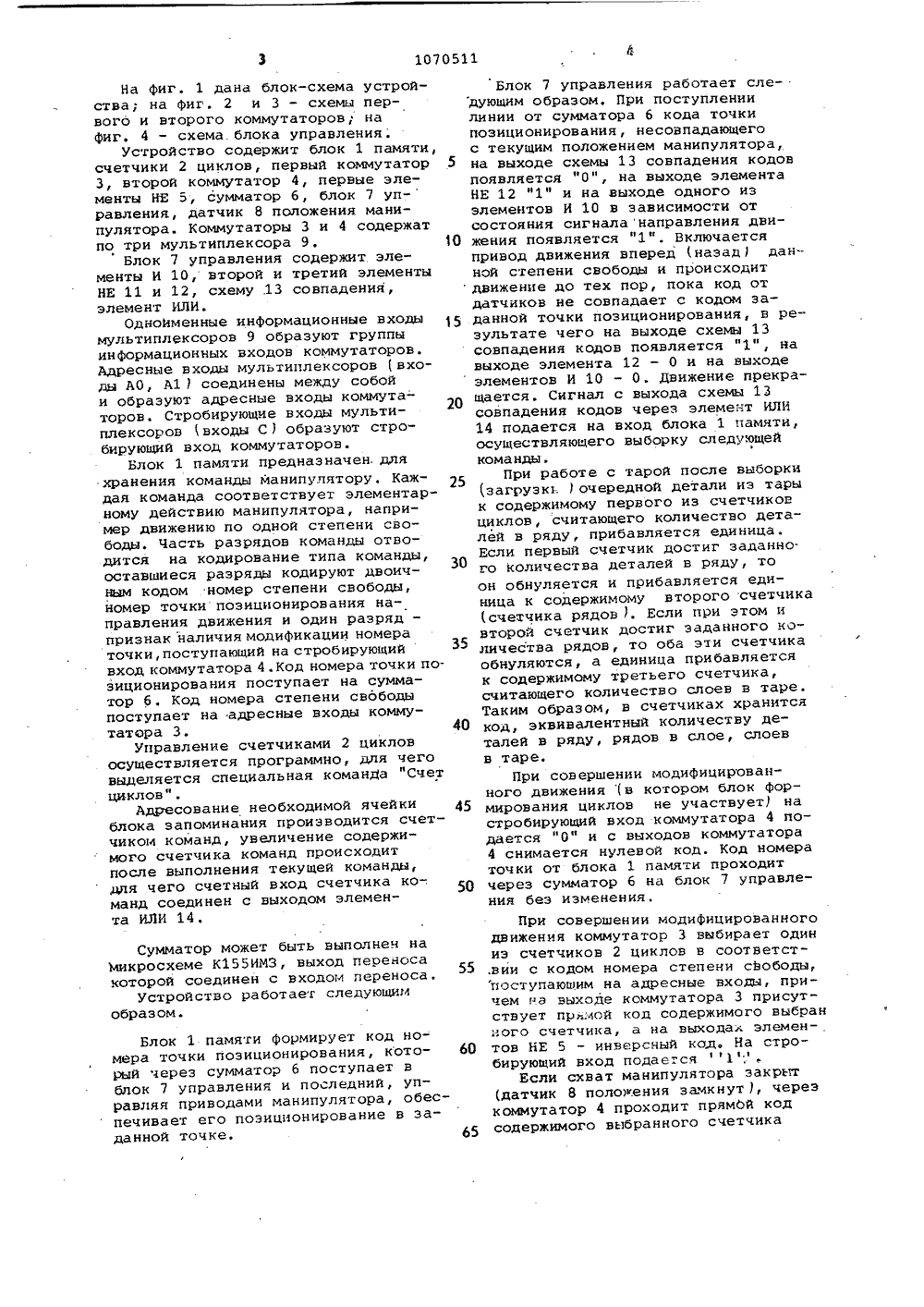
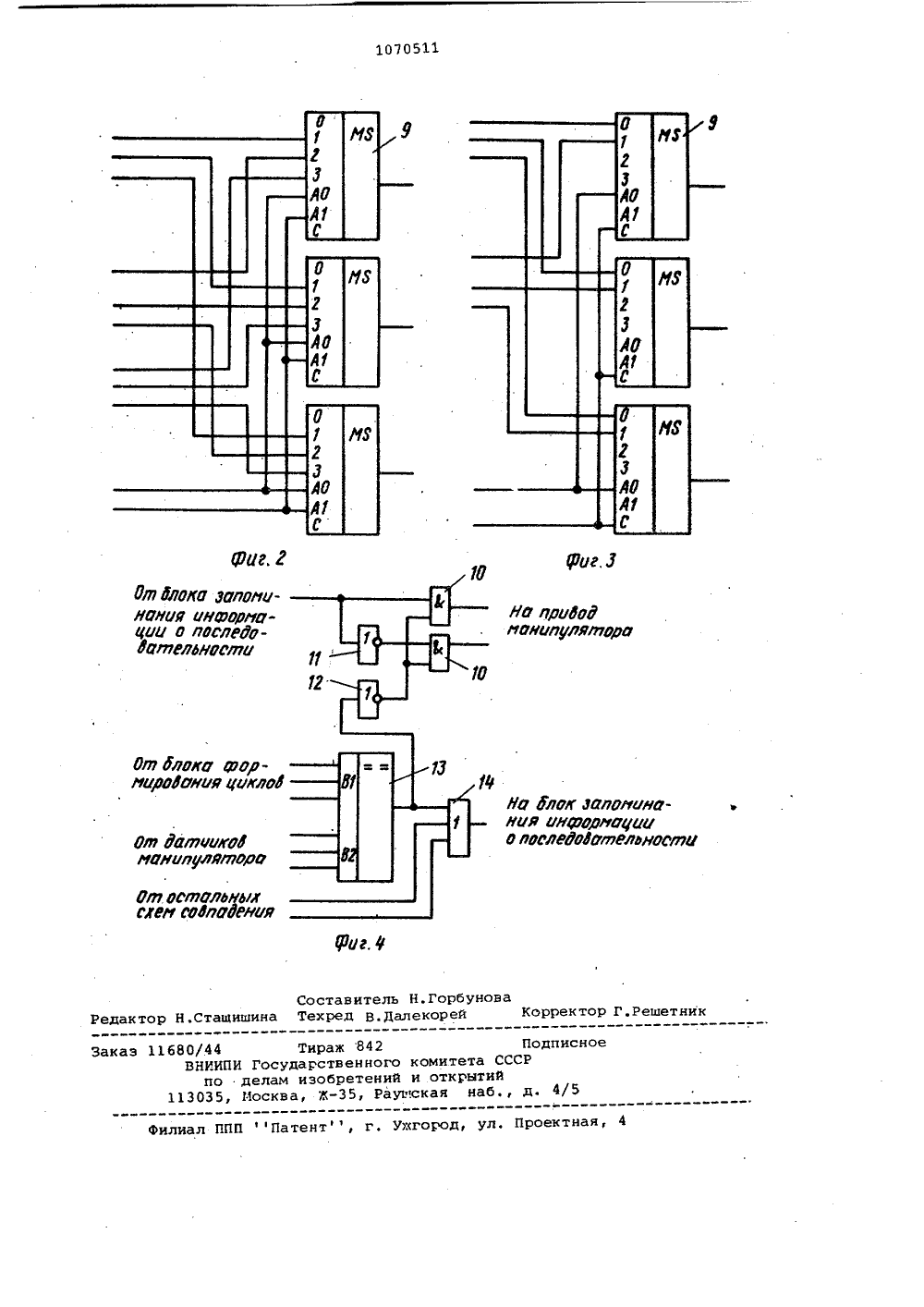
СОКИ СОВЕТСКИХЮЗИОИРФепщикРЕСПУБЛИК Зщ 6 05 В 19/19 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(56) 1. Устройство промышленных роботов. Сборник. Л., "Машиностроение", 1980, с. 141, рис. 111-5.2.Система,циклсвого программного управления УЦМ 663, Т 072,556.012, ОКБ технической кибернетики, ЛПИ, 1979 (прототип ).(54) (57) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГОУПРАВЛЕНИЯ МАНИПУЛЯТОРОМ, содержащее,первый коммутатор, подключенный первыми, вторыми и третьими информационными входами к первым выходамсоответственно первого, второго итретьего счетчиков импульсов, а адресными входами - к первым выходамблока памяти, соединенного вторымивыходами с первыми входами сумматора, подключенного выходами к пер.,ЯОь 1070511 А вым входам блока управления, связанного вторым входом и выходом соответственно с третЬим выходом и входом блока памяти, подключенного четвертым выходом к счетному входу первого счетчика циклов,соединенного вторым выходом с счетным входом второго счетчика циклов, подключенного вторым выходом к счетному входу третьего счетчика, датчик положения манипулятора, о т л и ч а - ю щ е е с я тем,что, с целью раааирения функциональных возможностей путем обеспечения операций загрузки и выгрузки одновременно в соответствии с программой, в него введены второй коммутатор и три первых элемента НЕ, подключенные входами к выходам первого коммутатора и к первым информационным входам второго коммутатора, а выходами - к вторым информационным входам второго коммутатора, свя занного адресным входом с выходом датчика положения манипулятора, стробирующим входом - с пятым выходом блока памяти, а выходом - с вторым входом сумматора.Изобретение относится к роботостроению, а именно к устройствамуправления манипулятором.Известны системы программногоуправления манипулятором, содержащие блок запоминания информациио последовательности, хранящийпрограмму работы манипулятОра, блокуправления "включено-выключено",блок управления переходами.При воспроизведении программыинформация о последовательностивыполнения единичных операций ( командпоступает в блок управления"включено-выключено", управляющийприводами манипулятора. При достижении заданного положения звеньямиманипулятора срабатывают путевыепереключатели, сигнал от которыхпоступает на блок управления переходами, который инициирует переходк выполнению следующей команды 1.К недостаткамданных систем управления следует отнести то, чтопри необходимости многократногоповторения манипулятором некоторойпоследовательности действий этупоследовательность приходится записывать в программе столько раз, сколько ее требуется повторить.Наиболее близким к предлагаемомуявляется устройств;, в состав которого включен блок Формирования циклов, содержащий два счетчика циклов, счетные импульсы на которыепоступают от схемы управления счетчиками циклов, Счетчики считаютколичество повторений последовательности действий манипулятораи при отработке его заданное число раз блок управления переходамиинициирует переход к команде,следующей за отработанными последовательностями. При работе с упорядоченной таройнеобходимо осуществление модификации номера точки позиционирования в зависимости от количества повторений последовательности действий, для чего в состав блока управления введен коммутатор с двумя группами входов, соединенными с выходами счетчиков циклов и сумматор номера ,точки, одна группа входов которого соединена с выходами коммутатора, а вторая - с выходами блока запоминания информации о последовательности, определяющими номер .очки позиционирования. Выходы сумматора соединены с входами блока управлеНния ."включено-выключено . При этом один из счетчиков считает количество деталей в одном ряду тары, а другой - количество рядов в таре. При выдвижении схата манипулятора к ячейке тары содержимое счетчиков циклов через коммутатор счетчиков10 15 25 30 35 40 45 50 55 60 65 20 циклов поступает на сумматор номера точки, в котором происходит прибавление содержимого Выбранногосчетчика циклов к номеру точки позиционирования звена манипулятора.В блок управления "включено-выключено" от сумматора номера точкипоступают модифицированные номераточек позиционирования манипуляторадля каждой из степеней свободы манипулятора, осуществляющей движение по направлению укладки деталейв тару, Таким образом, при повторении очередного движения к ячейке тары обеспечивается выборка каждыйраэ новой ячейки, Манипулятор, оснащенный такой системой управления,может производить, например, разгрузку тары Г 2.Если кроме разгрузки иэделий изтары по технологическому регламентунеобходима укладка этих изделий вдругую тару, то известное устройство эту задачу выполнить не сможет,поскольку порядок укладки может несовпадать с порядком выборкиизделий, в частности разгрузкатары осуществляется сверху вниз,а укладка - снизу вверх.Цель изобретения - расширениеФункциональных возможностей устройства путем обеспечения операций загрузки и выгрузки одновременно всоответствии с программой,Поставленная цель достигаетсятем, что в устройство для программно.го управления манипулятором, содержащее первый коммутатор, подключенныйпервыми, вторыми и третьими информационными входами к первым выходамсоответственно первого, второго итретьего счетчиков импульсов, аадресными входами - к первым входамблока памяти, соединенного вторымивыходами с первыми входами сумматора, подключенного выходами к первым входам блока управления, связанного вторым входом и выходом соответственно с третьим выходом ивходом блока памяти, подключенногочетвертым выходом к счетному входупервого счетчика циклов, соединенного вторым выходом со счетнымвходом второго счетчика циклов,подключенного вторым выходом к счетному входу третьего счетчика, датчик положения манипулятора, введены второй коммутатор и три элементаНЕ, подключенные входами к выходампервого .коммутатора и к первым информационным входам второго коммутатора, а выходами - к вторым информационным входам второго коммутатора, связанного адресным входом с выходом датчика положения манипулятора, стробирующим входом - с пятымвыходом блока памяти, а выходом -с вторым входом сумматора.1070511 510 55 60 65 На фиг. 1 дана блок-схема устройства; на Фиг. 2 и 3 - схемы первого и второго коммутаторов; нафиг. 4 - схема. блока управления.Устройство содержит блок 1 памяти,счетчики 2 циклов, первый коммутатор3, второй коммутатор 4, первые элементы НЕ 5, сумматор б, блок 7 уп-равления, датчик 8 положения манипулятора. Коммутаторы 3 и 4 содержатпо три мультиплексора 9,Блок 7 управления содержит элементы И 10, второй и третий элементыНЕ 11 и 12, схему .13 совпадения,элемент ИЛИ.Одноименные информационные входымультиплексоров 9 образуют группыинформационных входов коммутаторов.Адресные входы мультиплексоров (вхо,пы АО, А 1 ) соединены между собойи образуют адресные входы коммута-торов. Стробирующие входы мультиплексоров входы С 1 образуют стробирующий вход коммутаторов.Блок 1 памяти предназначен.дляхранения команды манипулятору. Каждая команда соответствует элементарному действию манипулятора, например движению по одной степени свободы. Часть разрядов команды отводится на кодирование типа команды,оставшиеся разряды кодируют двоичным кодом номер степени свободы,номер .точки позиционирования направления движения и один разряд -признак наличия модификации номераточки, поступающий на стробирующийвход коммутатора 4.Код номера точки позиционирования поступает на сумматор б. Код номера степени свободыпоступает на адресные входы коммутатора 3.Управление счетчиками 2 цикловосуществляется программно, для чеговыделяется специальная команца "Счетциклов",Адресование необходимой ячейкиблока запоминания производится счетчиком команд, увеличение содержимого счетчика команд происходитпосле выполнения текущей команды,для чего счетный вход счетчика команд соединен с выходом элемента ИЛИ 14. Сумматор может быть выполнен намикросхеме К 155 ИМЗ, выход переносакоторой соединен с входом переноса,Устройство работает следующимобразом. Блок 1 памяти формирует код номера точки позиционирования, который через сумматор б поступает вблок 7 управления и последний, управляя приводами манипулятора, обеспечивает его позиционирование в заданной точке,Блок 7 управления работает следующим образом. При поступлении линии от сумматора б кода точки позиционирования, несовпадающегос текущим положением манипулятора,на выходе схемы 13 совпадения кодовпоявляется "0", на выходе элементаНЕ 12 ф 1" и на выходе одного изэлементов И 10 в зависимости отсостояния сигналанаправления движения появляется "1". Включаетсяпривод движения вперед 1 назад 1 дан-.ной степени свободы и происходитдвижение до тех пор, пока код от датчиков не совпадает с кодом за 5 данной точки позиционирования, в результате чего на выходе схемы 13совпадения кодов появляется "1", навыходе элемента 12 - 0 и на выходеэлементов И 10 - О. Движение прекращается. Сигнал с выхода схемы 13совпадения кодов через элемент ИЛИ14 подается на вход блока 1 памяти,осуществляющего выборку следующейкоманды.При работе с тарой после выборкизагрузки 1 очередной детали из тарык содержимому первого из счетчиковциклов, считающего количество деталей в ряду, прибавляется единица.Если первый счетчик достиг заданного Количества деталей в ряду, тоон обнуляется и прибавляется единица к содержимому второго счетчикасчетчика рядов ). Если при этом ивторой счетчик достиг заданного количества рядов, то оба эти счетчикаобнуляются, а единица прибавляетсяк содержимому третьего счетчика,считающего количество слоев в таре.Таким образом, в счетчиках хранится"0 код, эквивалентный количеству деталей в ряду, рядов в слое, слоевв таре,При совершении модифицированного движения (в котором блок фор 45 мирования циклов не участвует) настробирующий вход коммутатора 4 подается "0" и с выходов коммутатора4 снимается нулевой код. Код номераточки от блока 1 памяти проходит50 через сумматор б на блок 7 управления без изменения,При совершении модифицированногодвижения коммутатор 3 выбирает одиниэ счетчиков 2 циклов в соответст.вии с кодом номера степени сЬободыпоступающим на адресные входы, причем на выходе коммутатора 3 присутствует пр,мой код содержимого выбран ного счетчика, а на выходах элементов НЕ 5 - инверсный кад, На стробирующий вход подается 1 ",Если схват манипулятора закрыт датчик 8 положения замкнут 1, через коммутатор 4 проходит прямбй код содержимого выбранного счетчика2 циклов и в сумматоре 6 происходит прибавление его к номеру точки позиционирования. Если схват манипулятора открыт (датчик положения разомкнут), через коммутатор 4 проходит инверсный код содержимого выбранного счетчика 2 циклов и в сумматоре 6 происходит вычитание его из кода номера точки позиционирования. Таким образом, при выборке деталей из тары (схват манипулятора открыт) выборка начинается от ячейки с большим номером и при выборке последующих деталей номер ячейки каждый раэ уменьшается на единицу. При укладке тары (схват закрыт) укладка начинается от ячейки с меньшим номером и при укладке последующих;деталей номер ячейки каждый раз увеличивается на единицу. Таким образом, направление выборки и укладки противоположны,Управление коммутатором 4 можно осуществить .программно, для чего в модифицируемой команде движения необходимо указать признак сложениявычитаиия выбранного содержимого счетчика циклов с номером тЬчкипозиционирования, Гибкость системыпрограммного управления при этомвозрастаетВ связи с введением в блок фор мирования циклов второго коммутатора 4, который подключает к сумма"ору либо прямОй, либо инверсныйчерез инверторы) выход первогокоммутатора, выбирающего один из 10 счетчиков цикла, появилась возможность либо прибавлять, либо вычитать содержимое счетчика цикла изномера точки позиционирования, т.е.предлагаемое устройство позволяет 15 управляемому манипулятору выполнять больший диапазон операций,в частности производить выборку деталей иэ тары, доставку их на место обработкн и чкладку после обработки во вторую тару,.Таким образом, предлагаемое устройство программного управления манипулятором по сравнению с известным обладает большими Функциональ,ными возможностями.1070511 Фиг. г аю дакюцкоРианцпуляпор дщ южльми ию собподеиц Составитель Н.Горбунова дактор Н.Сташишина Техред В.Далекорей Корректор Г.Решетн680/44 Тираж 842ВНИИПИ Государственного компо делам изобретений и113035, Москва, Ж, Раушск Подпитета СССРткрытийя наб., д. 4 ак ППППатент , г. ужгород, ул. Проектная, 4 Фил Ол ФО/й 7 яду 70/й/- нанця цнфорнаици о последо- йтелюости Ол олока 4 Раркиробонця ццкло ЮУ л,ООА 7 днонцауляторо Юа олок юаполинаия информации последоЯтелвности
СмотретьЗаявка
3410121, 19.03.1982
ВОЛГОГРАДСКОЕ ОПЫТНО-КОНСТРУКТОРСКОЕ БЮРО "РОБОТЫ" НАУЧНО ПРОИЗВОДСТВЕННОГО ОБЪЕДИНЕНИЯ "КОМПЛЕКС"
ШИРОКОСТУП ВАЛЕРИЙ ТИМОФЕЕВИЧ, КИБАЛЬНИКОВ ВАЛЕРИЙ ИВАНОВИЧ, ЗЕМЛЯНСКИЙ ВЛАДИМИР ИВАНОВИЧ
МПК / Метки
МПК: G05B 19/19
Метки: манипулятором, программного
Опубликовано: 30.01.1984
Код ссылки
<a href="https://patents.su/5-1070511-ustrojjstvo-dlya-programmnogo-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления манипулятором</a>
Цифровой фильтр

Номер патента: 1758836
Опубликовано: 30.08.1992
Автор: Тимченко
МПК: G06F 15/353, H03H 17/06, H03M 3/04
...01 ТИ ЗЯЧ 1 И) О) И 118 11 РКВ 01".1 Т : ИЯМ 818 НИ)0 ЭНЯКЯ ЬВЯ Я 1, ЗЯНТОВЯ 11 Я. ) 10 С)ЗЦОВЯТ 8 ЛЬНОСТЬ 1 ) СООТ"ВЬТСТВУ; Т ПОРВОЙ РЯЭНОСГИсчитывается за интервал реализации О счетчиком 3. В конце интервала реализации по импульсу с выхода переполнения счетчика 2 накопленное в счетчике 8 значение записывается в регистр (О, а счетчик 8 обнуляется, чем падготавливаегся к следующему периоду чакапления, Таким образам, на выходах регистра 10 блока д.2 Формируется числа нулей второго порядка 02, которое сахраняе 1 ся на этих выходах в течение следующего интервала реализации,Формирование числа нулей более высоких порядков рассмотрим на примере блока З,К с К=З. Последовательность значений (Рп"), поступающая с первого и вторых выходов 25 и 26...
Устройство для контроля цифровых блоков

Номер патента: 1037259
Опубликовано: 23.08.1983
МПК: G06F 11/16
...блока,вход которого соединен с шиной входных и выходных сигналов интегральных схем модуля, выход регистра длины теста соединен с первым входомвторого блока сравнения, второй входкоторого соединен с одноименным входом регистра длины теста и первым выходом счетчика тактов, второй входи первый вход которого соединен с четвертым входом и вторым выходом основного Ьлока управления соответственно,дополнительные входы - выходы счетчика тактов, регистра длины теста,регистра результата, дополнительногои основного блоков управления соедикоторого соединен с первым входом блока индикации, первая группа входовкоторого соединена с второЙ ".группойвыходов блока управления, третья группа выходов которого соединена с первой группой входов блока...
Пьезоэлектрический манипулятор для прецизионного позиционирования оптических элементов

Номер патента: 1749019
Опубликовано: 23.07.1992
Авторы: Бровков, Джагупов, Майко, Сидорчук, Ядрова
МПК: B25J 13/00
Метки: манипулятор, оптических, позиционирования, прецизионного, пьезоэлектрический, элементов
...числа на выходе микроЭВМ моментИзменение положения светодиода 13 переполнения сумматора будет наступать относительно оптического волокна кабеля раньше или позже, т.е. ширина импульса 17 вызывает изменение освещенности фо изменяется при перемещении переднего тодиода 16, связанного с оптическим ка- фронта, а момент окончания импульса фик-.белем. Фотодиод генерирует ток 1 фд, сирован и определяется моментом переполпропорциональный его освещенности. Фо- нения двоичного счетчика 19,тодиод 16 подключен к входу устройства 9Таким образом, на выходе переноса сумсъема сигнала обратной связи в цифровом 20 маторов формируется последовательность . коде, преобразующего выходной сигнал фо- импульсов постоянного периода Т 0 = 2" х Т, тодиода в цифровой...
Преобразователь параллельного кода в последовательный

Номер патента: 898419
Опубликовано: 15.01.1982
Авторы: Антонов, Жиглов, Павлов
МПК: G06F 5/04
Метки: кода, параллельного, последовательный
...19 6которому в него с входов 6 записывается слово, подлежащее преобразованию. Работа начинается с отсчета числа импульсов, поступающих с генератора 1 импульсов на вход счетчика 2. С выхода счетчика 2 в параллельном коде на вход дешифратора 3 подается число отсчитанных импульсов, Когда это число дойдет до величины, соответствующей появлению сигнала на первом выходе дешифратора 3, на элементы И группы 4 поступает сигнал опроса, при этом с выхода счетчика 16 в параллельном коде на вход дешифратора 19 подается код, соответствующий номеру опрашиваемого разряда ре-. гистра 5, с первого выхода дешифра- . тора 19 разрешение поступает на пер. вый логический элемент И группы 4 элементов И, и он пропускает информацию (ннульн или нединицу") из...
Устройство для вычисления булевых функций
Номер патента: 955027
Опубликовано: 30.08.1982
Авторы: Ерофеев, Михайлова, Полященко, Шандрин
МПК: G06F 7/00
Метки: булевых, вычисления, функций
...счетчик 6 адреса поступает импульс,увеличивающий на единицу код хранящегося в нем числа, и при появлении настробирующем входе регистра 7 импульса, значение переменной, адрес которой закодирован во второй команде,через коммутатор 3 заносится во вторую ячейку регистра 7, Если втораякоманда содержит признак отсутствия 10операции, то на этом цикл выполнениявторой команды заканчивается. При наличии в операционной части второгокомандного слова признаков операцииконъюнкции или дизъюнкции с выхода 15блока 5 управления на счетчик 6 адреса подается импульс, уменьшающийхранящееся в нем число на единицу,т.е, на адресные входы регистра 7и коммутатора 8 подается код нуля.Коммутатор 8 служит для подключенияк входам вычислительного блока 4двух...
Предыдущий патент: Устройство управления выгрузкой накопителей установки для сортировки почты
Следующий патент: Устройство для двухкоординатного позиционирования
Случайный патент: Способ лечения абсолютной болящей глаукомы