Цикловая система программного управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
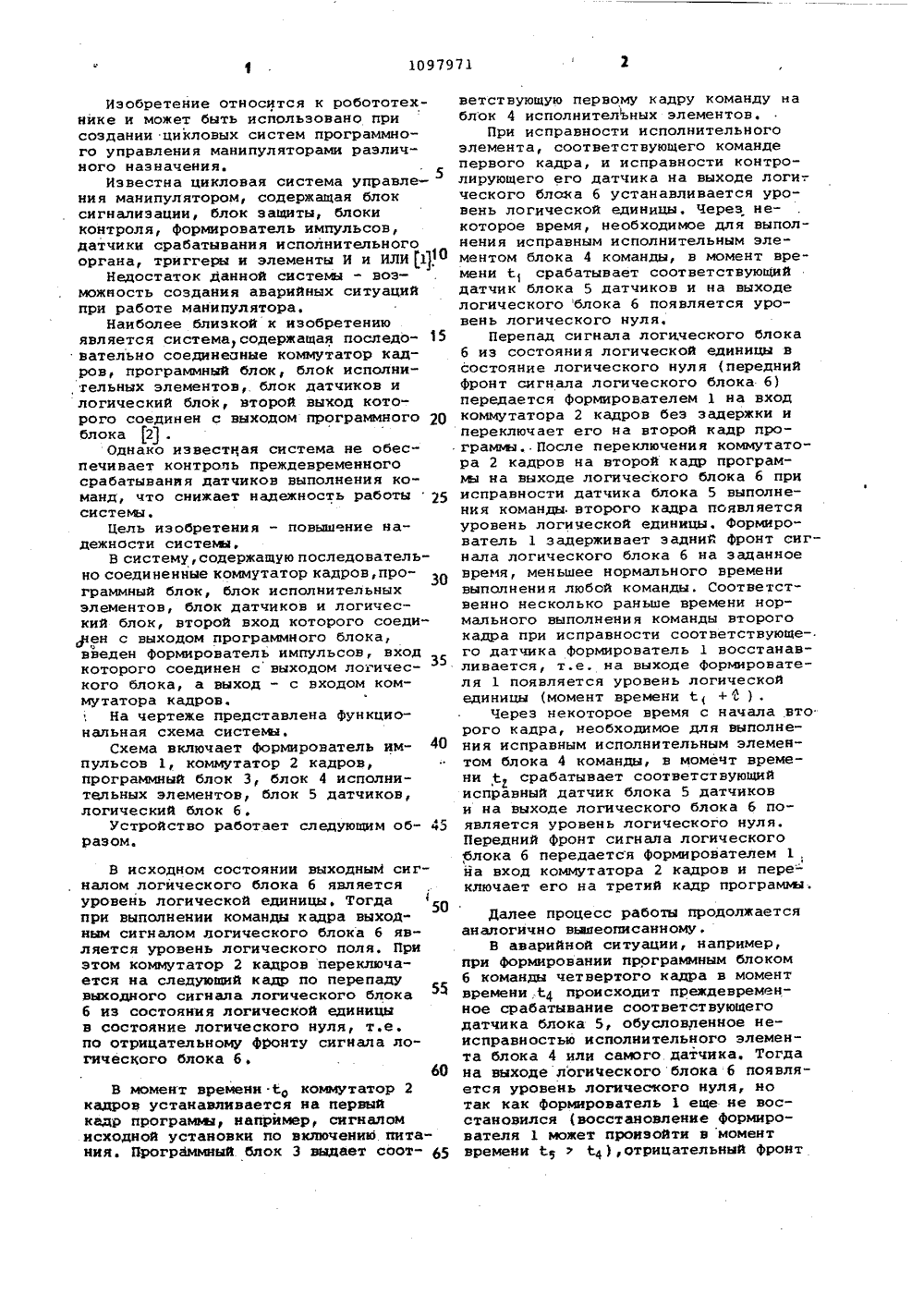
ОПИСАНИЕ ИЭОБРЕТ ВТОРСКОМУ С ТЕЛЬСТ ОСУДАРСТЭЕНКЫИ КОМИТЕТ СССР ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ(прототип),(54) (57) ЦИКЛОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МАЙИПУЛЯТОРСИ, содержащая последовательно соединенные коммутатор, кадров, программный блок,блок исполнительных элементов, блокдатчиков и логический блок, второйвход которого соединен с выходом программного блока, о т л и ч а ю щ а яс я тем, что, с целью повышения надежности система, она содержит формирователь импульсов, вход которогосоединен с выходом логического.блока, а выход - с входом коммутаторакадров.Изобретение относится к робототехнике и может быть использовано присоздании цикловых систем программного управления манипуляторами различного назначения.Известна цикловая система управления манипулятором, содержащая блоксигнализации, блок защиты, блокиконтроля, формирователь импульсов,датчики срабатывания исполнительногооргана, триггеры и элементы И и ИЛИ ЯОНедостаток данной системы - воэможность создания аварийных ситуацийпри работе манипулятора.Наиболее близкой к изобретениюявляется системасодержащая последо- (5вательно соединенные коммутатор кадров, программный блок, блоК исполнительных элементов, блок датчиков илогический блок, второй выход которого соединен с выходом программного 2 Облока (2 .Однако известная система не обеспечивает контроль преждевременногосрабатывания датчиков выполнения команд, что снижает надежность работы 25системы.Цель изобретения - повышение надежности систеьы,В систему, содержащую последовательно соединенные коммутатор кадров,программный блок, блок исполнительныхэлементов, блок датчиков и логический блок, второй вход которого соедирен с выходом программного блока,введен формирователь импульсов, входкоторого соединен с выходом логического блока, а выход - с входом коммутатора кадров,На чертеже представлена функциональная схема систеьы,схема включает формирователь им Опульсов 1, коммутатор 2 кадров,программный блок 3, блок 4 исполнительных элементов, блок 5 датчиков,логический блок б.Устройство работает следующим образом,В исходном состоянии выходныМ сигналом логического блока б является уровень логической единицы. Тогда при выполнении команды кадра выходным сигналом логического блока б является уровень логического поля, При этом коммутатор 2 кадров переключается на следующий кадр по перепаду выходНого сигнала логического блока 6 из состояния логической единицы в состояние логического нуля, т.е, по отрицательному фронту сигнала логического блока 6.бОВ момент времени 1 р коммутатор 2 кадров устанавливается иа первый кадр программа, например, сигналом исходной установки по включению питания. Программный блок 3 выдает соот ветствующую первому кадру команду на блок 4 исполнителъных элементов.При исправности исполнительного элемента, соответствующего команде первого кадра, и исправности контролирующего его датчика на выходе логик ческого блока б устанавливается уровень логической единицы. Через некоторое время, необходимое для выполнения исправным исполнительным элементом блока 4 команды, в момент времени С 1 срабатывает соответствующий датчик блока 5 датчиков и на выходе логического блока б появляется уровень логического нуля.Перепад сигнала логического блока б из состояния логической единицы в состояние логического нуля (передний фронт сигнала логического блока 6) передается формирователем 1 на вход коммутатора 2 кадров беэ задержки и переключает его на второй кадр программы,.После переключения коммутатора 2 кадров на второй кадр программы на выходе логического блока б при исправности датчика блока 5 выполнения команды второго кадра появляется уровень логической единицы, формирователь 1 задерживает задний фронт сигнала логического блока б на заданное время, меньшее нормального времени выполнения любой команды. Соответственно несколько раньше времени нормального выполнения команды второго кадра при исправности соответствующего датчика формирователь 1 восстанавливается, т.е. на выходе формирователя 1 появляется уровень логической единицы (момент времени 1 + 2 ) .Через некоторое время с начала вто рого кадра, необходимое для выполнения исправным исполнительным элементом блока 4 команды, в момечт временисрабатывает соответствующий исправный датчик блока 5 датчиков и на выходе логического блока 6 появляется уровень логического нуля.Передний фронт сигнала логического блока б передается формирователем 1, на вход коммутатора 2 кадров и пере- ключает его на третий кадр программы . Далее процесс работы продолжается аналогично вышеописанному.В аварийной ситуации, например, при формировании программным блоком 6 команды четвертого кадра в момент времеви й 4 происходит преждевременное срабатывание соответствующего датчика блока 5, обусловленное неисправностью исполнительного элемента блока 4 или самого датчика. Тогда на выходе логического блока 6 появляется уровень логического нуля, но так как формирователь 1 еще ие восстановился (восстановление формирователя 1 может произойти в момент времени С ) 14),отрицательный ФронтЗаказ 4205/38 Тираж 842 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раущская наб., д. 4/5Филиал ППППатентф, г, Ужгород, ул, Проектная, 4 сигнала логического блока 6 не изменяет состояния формирователя 1, В результате коммутатор 2 кадров не переключается на следующий кадр и отработка программы прекращается.Ф 5 Применение изобретения позволит исключить возможность создания аварийных ситуаций, обусловленных выходом иэ строя датчиков выполнения команд (когда датчик дает информациюо выполнении кЬманды, хотя она ещене выполнена), как до момента подачикоманды, так и во время подачи команды на исполнительный механизм, чтопозволяет повысить надежность системы циклового программного управленияманипулятором.
СмотретьЗаявка
3555008, 06.01.1983
ПРЕДПРИЯТИЕ ПЯ А-7292
ЕРМАКОВ МИХАИЛ ВИКТОРОВИЧ, ТРУНИН ВЯЧЕСЛАВ ИВАНОВИЧ, ПЕТРОВ ДМИТРИЙ БОРИСОВИЧ, СЕМЕНОВ ВЯЧЕСЛАВ ФЕДОРОВИЧ, СОЛОВЬЕВ АЛЕКСАНДР ГРИГОРЬЕВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: манипулятором, программного, цикловая
Опубликовано: 15.06.1984
Код ссылки
<a href="https://patents.su/3-1097971-ciklovaya-sistema-programmnogo-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Цикловая система программного управления манипулятором</a>
Устройство для контроля функционирования логических блоков

Номер патента: 1327107
Опубликовано: 30.07.1987
Авторы: Богданов, Кондратеня, Старовойтов
МПК: G06F 11/36
Метки: блоков, логических, функционирования
...регистра является первым входом синхронизации узла, а первый и зторой информационные входы разрядов двухразрядного регистра соединены соотВетствРнно с Выходами первогс ивторого разрядов четырехразрядногорегистра, выход четвертого разряцакоторого через элемент НЕ соединенс входом обмотки реле, выход обмоткиреле соединен с пенной электропитанияТТЛ, выход третьего разряда четырехразрядного регистра соединен с перВЬГе входом элемента И, второй входкоторого соединен с выходом элементасложения по модуло,цва, выход элемента 1 соединен с информационным Входом В-т 1 иггера, Вход синхронизации которого является вторым Входом СИНХООНИЗсп 1 ИИ а ВХОД СбрОСа Являет" ся входом сброса узла, инверсный выход 1-триг ера соединен с входом...
Устройство для контроля субблока логического блока

Номер патента: 1327111
Опубликовано: 30.07.1987
Авторы: Голубцов, Корняков, Пархоменко
МПК: G06F 11/26
Метки: блока, логического, субблока
...определяющего второй режимработы, запускается формирователь 60одиночного импульса, который устанавливает триггер 61 в единичное состояние, Триггер 61 пуска-останова режима Проверка в нулевое состояниеможет быть установлен нажатием кнопки "Сброс" 46 или при появлении навходе 27 сигнала сшибки определениявходов-выходов контролируемого иэталонного субблоков блоком 6 определения входов-выходов.Коммутатор 15 индикации осуществляет подключение информации к индикаторам 17 от регистра 8 теста, буферного регистра 14 либо от блока 6определения входов-выходов в зависимости от положения трехпозиционногопереключателя 18 режимов визуальногоконтроля,Элемент ИЛИ 16 проводит анализ наличия несовпадения и в случае их появления производит блокировку...
Устройство для формирования тестов субблока логического блока

Номер патента: 1513453
Опубликовано: 07.10.1989
Авторы: Воинов, Голубцов, Ковалев, Пархоменко
МПК: G06F 11/26
Метки: блока, логического, субблока, тестов, формирования
...происходит в узел 31 регистровой памяти по следующей логической ветви блока 5 промежуточного накопления тестов. Импульс опроса с выхода элемента И 26 через коммутатор 28 поступает на вход счетчика 29 и на управляющий вход записи узла 31. Кроме того, импульс записи с выхода элемента И 26 поступает на вход разрешения записи регистра 23, который также принимает информацию с входов 11 и закрывает тем самым нулевым потенциалом с выхода схемы 24 поразрядного сравнения элемент И 26. Счетчик 29 адреса записи по заднему фронту импульса устанавливается в состояние А = Аподготавливая тем самым последующую запись в следующий регистр узла 31. 9 151345 ния значению на своем управляемом счетчике формирует сигнал переполнения на выходе 18 и...
Устройство для контроля функционирования логических блоков

Номер патента: 1599860
Опубликовано: 15.10.1990
Авторы: Кондратеня, Старовойтов
МПК: G06F 11/30
Метки: блоков, логических, функционирования
...тем самым блоков сопряжения, в которые должна поступать тестовая информация программы контроля. Если контролируется толькоодин из логических блоков, подключенный, например, к первому блоку сопряжения устройства, то первым словом программы контроля должно быть ко. командное слово ВЫБОРКА БС с единицей с восьмом разряде, Адресный байт этого слова поступит в дешифраторкоманд, на выходе 40 которого будет сформирован сигнал записи разрядов данных командного слова в регистр 12. В первый разряд регистра 12 будет записана единица из разряда шины 17 . блока памяти, Сигнал ЗАГР БС 1 с выхода регистра 12 разрешит прохождение программы только в первый блок сопряжения, во все другие блоки сопряжения программа контроля в данном случае не поступает,...
Устройство для контроля логических блоков

Номер патента: 1302281
Опубликовано: 07.04.1987
Авторы: Бессарабов, Пивен, Чистяков
МПК: G06F 11/00
Метки: блоков, логических
...в регистр 3. Аналогично по заполнению регистров 23 производится перепись в регистры 5 и 6 по командам 21 и 23. В регистр 54 блока 12 (фиг.8) служебная информация заносится следующим образом. По шине 14 через информационный вход блока 1 (фиг.2), усилители 22-7 и 22-8, выходы блока 1, информационные входы блок% 12 поступает на информационные 01 и 02 входы информация. По шине 16 поступает команда 31, которая дешифрируется дешифратором 30 и вызывает появление единичного уровня на шестом выходе блока 2, который через разрешающий вход блока 12 поступает на управляющий вход регистра 54, а на синхровход его поступает сигнал с формирователя 37 блока 2 (фиг.5), по которому происходит занесение, Дешифратор 55 дешифрирует состояние регистра 54....
Предыдущий патент: Адаптивная оптическая система
Следующий патент: Устройство для программного управления следящим перемещением по ведущему перемещению
Случайный патент: 163360