B25J 7/00 — Микроманипуляторы
Устройство для перемещения микроманипулятора

Номер патента: 1073088
Опубликовано: 15.02.1984
Автор: Флейтман
МПК: B25J 7/00
Метки: микроманипулятора, перемещения
...преобразователь движения, образованный входным и выходным звеньями. Входное звено выполнено в виде диска 1, имеющего на противоположных образующих поверхностях зубцы, напротив которых установлены отдельные электромагниты 2 и 3, и между зубцами и полюсами электромагнитов 2 и 3 расположены плоскости комбинированного выходного звена, изготовленные из токо- проводящего материала. Материал может быть также гистерезисным. Комбинированное выходное звено двухфазного преобразователя движения выполнено в виде двух дисков 4 и 5, закрепленных на общем валу 6 с зазором между плоскостями, Для периодического замыкания магнитного по- гока от электромагнитов 2 или 3 на валу 6 расположена обмотка дополнительного электромагнита 7, В другом варианте...
Микроманипулятор
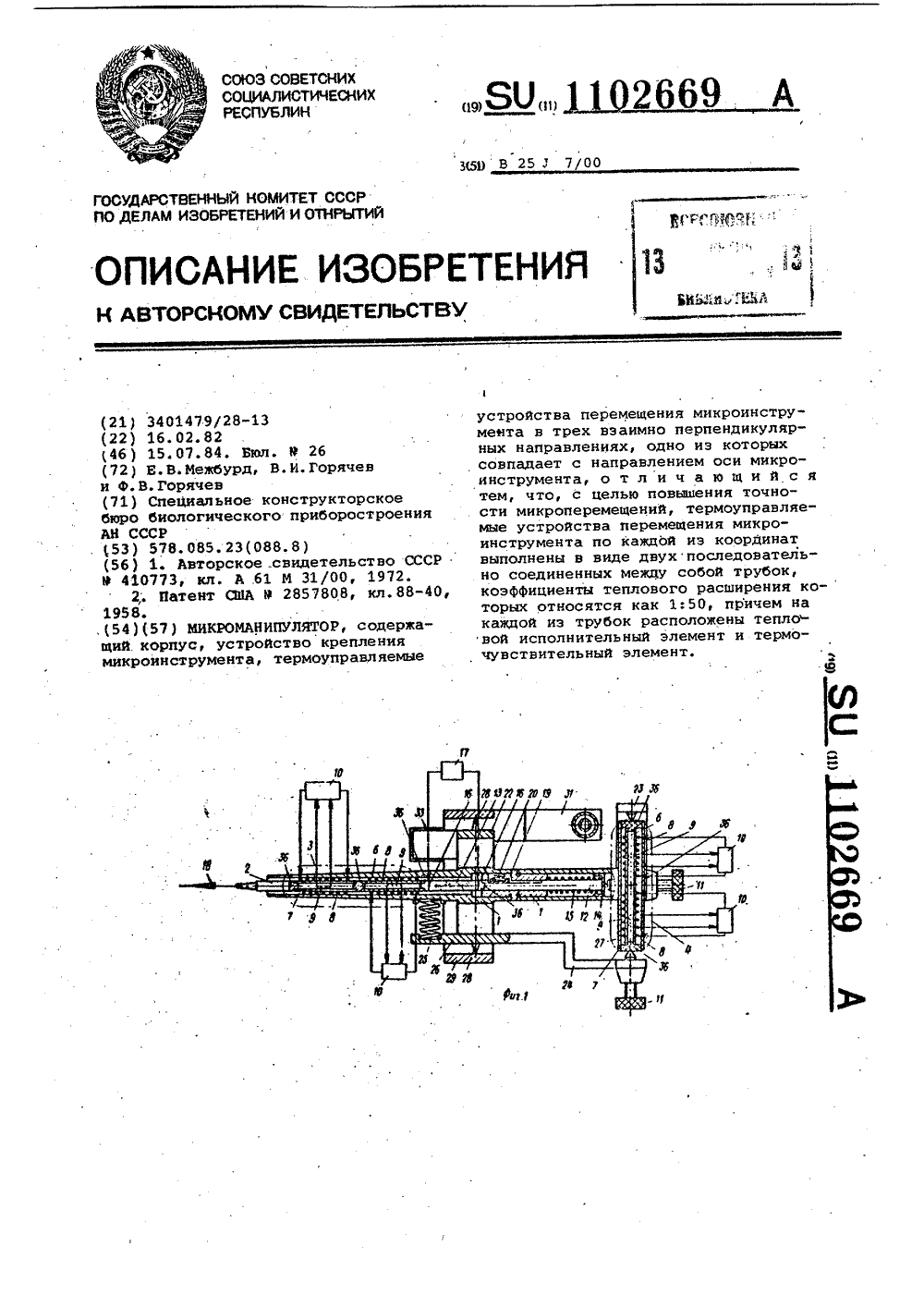
Номер патента: 1102669
Опубликовано: 15.07.1984
МПК: B25J 7/00
Метки: микроманипулятор
...5пружиной 20.Корпус 1 микроманипулятора с закрепленным в нем устройством 3 осевого перемещения через безлюфтовыешарниры 21 1 см. Фиг. 2 и 3) соединен 10с подвижной рамкой 22 см. Фиг. 1,2 и 3).Термоуправляемое устройство 4 вертикального перемещения установленомежду кронштейном 23, прикрепленнымнеподвижно к корпусу 1, и кронштейном 24, прикрепленным неподвижно крамке 22. Возвратная пружина 25 закреплена между планкой 2 Ь, прикрепленной к подвижной рамке 22, и корпусом 1.Жтройство 4 вертикального перемещения закрыто тепловыравнивающим экраном 27.Подвижная рамка 22 через безлюфтовые шарниры 28 см. Фиг. 1,3) соединена с неподвижной рамкой 29, 25Термоуправляемое устройство 5 горизонтального перемещения установлено между кронштейном 30,...
Устройство для манипуляций к микроскопу

Номер патента: 1114187
Опубликовано: 23.05.1985
МПК: B25J 7/00, G02B 21/32
Метки: манипуляций, микроскопу
...из двух частей - колпака 1 иоснования 2 (см.Фиг.), В колпакепо понерхйости его контакта с основанием 2 закреплен магнит 3, например,выполненный в виде кольпа. Закрытоепространство в камере обе печиваетсякачественной обработкой контактирующих поверхностей колпака 1 и основания 2, а также удержанием этих поверхностей в соприкосновении магнитнойсвязью между ними, созданной магнитом3, В стенке колпака 1 установлен рычаг 4, причем его щарнирное соединение образовано резиновой втулкой 5, которая закреплена в стенке колпака, а сам рычаг установлен в отверстии втулки, Привод рычага 4 выполнен в виде кулачка 6, закрепленного на оси 7 с ручкой (см.Фиг,2), При этом рычаг 4 поджат к кулачку 6 упругой резиновой втулкой 5. В отверстии рычага...
Микроманипулятор

Номер патента: 1202858
Опубликовано: 07.01.1986
Авторы: Габриелян, Кочикян, Овакимян, Рагульскис, Саркисян
МПК: B25J 7/00
Метки: микроманипулятор
...этом выходное звено линейно перемещается вдоль оси я, При подаче напряжения на управляющие электроды 7-18 частей 3 и 4 (фиг. 3) линейные перемещения участей 3 и 4 вдоль оси г складываются, при этом линейные перемещения выходного звена 2 удваиваются (фиг. 5), При подаче напряжения на управляющие электроды 7-18 частей 3 и 4 (фиг. 2) угловые перемещения частей 3 и 4 складываются, в результате угловые перемещения выходного звена 2 удваиваются (фиг. б).В случаях отработки частями привода микроманипулятора линейных и угловых (фиг. 7), а также только линейных (фиг. б) перемещений выходного звена промежуточное звено, связывающее центральные части преобра" зователей, может быть установлено на дополнительных направляющих поступательного...
Рабочий орган манипулятора

Номер патента: 1202859
Опубликовано: 07.01.1986
Авторы: Генералова, Гурылев, Лопухин, Михайлов, Плотников
МПК: B25J 7/00
Метки: манипулятора, орган, рабочий
...7 выполнен в виде трубки,а следовательно, из жесткого материала (например, стали), то часть30 подводящего канала 1 от узла 6 крепления до присоски 2 может проходитьвнутри этой трубки. В качестве привода может быть использован шаговыйдвигатель РШДи редуктор с передаточным числом б:1.Рабочий орган манипулятора подачиплоского компонента интегральноймикросхемы для автоматов с системойтехнического зрения работает сле 40 дующим образом.По управляющим сигналам, подаваемым от системы управления, включается электродвигатель 3. Вращениеот электродвигателя 3 через редук10 15202530 35 40 45 50 55 тор 4 передается на выходной вал 5, на котором с помощью винтов закреплены узел 6 крепления подводящего канала 1 и огибающий промежуточный...
Микроманипулятор

Номер патента: 1219334
Опубликовано: 23.03.1986
Авторы: Бакашвили, Барабадзе, Мгебришвили, Панозишвили
МПК: B25J 7/00
Метки: микроманипулятор
...цепи привода и расшире. их возможностей за счет ого хода ползуна,и ползун связаны резьбоа привод храпового меха- виде пластины, связаннойНИ Заказ 119 глнал ППП "Патент", г. Ужгор Проек гная 1 12Изобретение относится к мцкроманипуляторам для экспериментальной биологии и может быть использовано для шагового погружения мпкроэлектродов в мозг обездвцжен,ного животного с целью изучения нейронной (внутриклеточной ц внеклеточпой) активное. тц.Цель изобретения - упрощение конструкции ц повышение точности позцционирова. ния путем сокрашения количества элементов в кицематической цспн привода и расширение технолопгескпх возможностей за счет обеспечения обратного хода полэуна.На фпг. 1 изображен мцкромапипулятор, общий вид; ца фцг, 2 - разрез Л-Л...
Микроманипулятор

Номер патента: 1229030
Опубликовано: 07.05.1986
Авторы: Ларин, Никитин, Хохлов
МПК: B25J 7/00
Метки: микроманипулятор
...возможности применения несимметричного микроицструмента за счет введения механизма поворота микроинструмецта.На чертеже изображен манипулятор общий вид, ОМикроманипулятор содержит корпуссъемный держатель 2 микроинструмента 3 со штуцером ц, механизм перемещения по трем взаимно перпендику-. лярным направлениям, раэмешенный в корпусе 1 (це показан), Микроманип 5- лятор содержит также механизм 5 поворота микроинструмента 3, .выполненный в виде торцовой магнитной муфты, состоящей из ведомого звена б, уста- И новленного на держателе 2 посредством опор 7 вращения и стакана 8, связанного резьбовым соединением с втулкой 9. Во втулке 9 установлен капилляр 10, связанный с полостью держате ля, и микроинструмент 3, Вецущее звено 11 торцовой...
Привод рабочего органа манипулятора

Номер патента: 1238958
Опубликовано: 23.06.1986
Авторы: Бронников, Королев, Яринич
МПК: B25J 7/00
Метки: манипулятора, органа, привод, рабочего
...Корпус 15 снабжен равномерно расположенными отверстиями 2 диаметром 0,2-0;3 мм, которые соединяются с магистралью избыточного давления воздуха. Для этого к наружным поверхностям корпуса 1 20 с двух сторон приложены резиновые прокладки 3 с вырезами под каналы подвода воздуха к отверстиям 2. На прокладку 3 укладывается обмотка статора, которая выполнена в виде двух расположенных взаимно перпендикулярно катушек 4 и 5, каждая из которых выполнена П-образной формы с намотанными по форме восьмерки витками, при этом стойки катушек 4 и 5 образованы рас положенными параллельнЪ в плоскости периферийными частями витков, полка - средней частью витков (фиг, 3).Внутри корпуса имеется якорь 6 из плоского магнита, к которому че- . А 958...
Координатное устройство

Номер патента: 1256907
Опубликовано: 15.09.1986
Авторы: Андреева, Вишнякова, Данилов, Эминов
МПК: B23Q 1/66, B25J 7/00
Метки: координатное
...подвергаемых бесконтактному методу обработки в контролируемых, агрессивных средах и в вакууме в широком диапазоне температур.Целью изобретения является повышение надежности, снижение металлоемкости и упрощение конструкции путем исключения пар трения движения. На фиг, 1 показано координатное устройство, общий вид; на фиг, 2 - то же, вид сбоку; на фиг. 3 - то же, вид сверху; на фиг. 4 - вид А на фиг. 1 (со снятой верхней платформой).Координатное устройство состоит из приводов 1 и 2, расположенных под углом 90 друг к другу. Каждый из этих приводов представляет собой две герметичные, зеркально расположенные друг относительно друга пневматические пружины (соответственно для обоих приводов), соединенные между собой трубопроводом 3. Приводы 1 и...
Микроманипулятор

Номер патента: 1261789
Опубликовано: 07.10.1986
Авторы: Горячев, Межбурд, Никитин, Утешев
МПК: A61B 5/05, B25J 7/00
Метки: микроманипулятор
...При этом происходит скачкообразное перемещение инструмента 3 со скоростью, необходимой для прокола клеточной оболочки без значительных деформаций клетки. При скачкообразном перемещении инструмента 3 возникают поперечные колебания инструмента из-за консольного крепления инструмента 3. Эти колебания гасятся жидкостный демпфером 7. Для обеспечения поперечных колебаний инструмента 3 на пьезоэлектрические пластины 4 чодается переменное напряже-ние ультразвуковой частоты, которое возбуждают продольное колебание инструмента 3, При определенном соотношении между продольной частотой и частотой собственных поперечных колебаний инструмента 3 его форма становится динамически неустойчивой и возникают поперечные колебания (поперечные колебания...
Привод микроманипулятора

Номер патента: 1271738
Опубликовано: 23.11.1986
МПК: B25J 7/00
Метки: микроманипулятора, привод
...из двух других расположенных противоположно гранях закреплены па 20 раллельно ребрам призмы два электрода 7, 8 и 9, 1 О соответственно, при этом призмы 2 и 3 подпружинены к корпусу пружинами 11 в направлении к штоку 4.В обесточенном состоянии накладки 6 25 входят в зацепление с зубчатой рейкой штока 4, фиксируя его в исходном положении.Привод питается от двух гальванически не связанных источников напряжения, выдающих импульсы прямоугольной фо 1)мы (не 30 показаны).Привод работает следующим образом.Для перемещения штока 4 вправо на верхние 7 и 9 и нижние 8 и 10 электроды призмы 2 подают напряжение с разной полярностью, что вызывает изгиб призмы 2, при котором сжимается пружина 11 и ее накладка 6 выходит из зацепления с зубчатой рейкой....
Манипулятор

Номер патента: 1278199
Опубликовано: 23.12.1986
Авторы: Андреева, Вишнякова, Данилов, Эминов
МПК: B25J 7/00
Метки: манипулятор
...упругодеформиется захватный орган, выполненный изупругодеформируемых криволинейныхтрубок 14, Полости упругодеформируемых элементов манипулятора соединень 1трубопроводами с источником подводимой энергии. 4 ил. руемой руки 3 закреплен тройник 11,герметично связанный с симметричнорасположенными относительно негоупругодеформируемыми криволинейными 5трубками 12 с одной стороны и с компенсационной трубкой 9 - с другой.Свободные концы упругодеформируемых криволинейных трубок 12 жесткосоединены с коллектором 13, которыйс одной стороны герметично соединенс компенсационной трубкой 10, а сдругой стороны - с захватным органом,вь 1 полненным в виде упругодеформируемых криволинейных трубок 14.Манипулятор работает следующим образом.По трубопроводу...
Микроманипулятор

Номер патента: 1283081
Опубликовано: 15.01.1987
Авторы: Рагульскис, Шержентас
МПК: B25J 7/00
Метки: микроманипулятор
...стабильности перемещения и повьппение долговечности микроманипулятора.На фиг. 1 представлен схематично предлагаемый микроманипулятор; н фиг. 2 - разрез А-А на фиг. 1.Микроманипулятор содержит корпус 1, в котором в направляющих 2, например шариковых, установлен держатель 3 с микроэлектродом 4 и шаговый привод, содержащий тонкие токопроводящие пластины 5 (например и пермалоя), одни концы которых жестко закреплены на корпусе 1, а другие 20 концы соединены гибкой диэлектрической пленкой. с односторонней металлизацией 7 (например алюминиевой), расположенной с зазором эквидистантно боковой поверхности держателя 3. Эквидистантно пластинам 5 установлены управляющие электроды 8, а держатель 3, имеющий форму четырехугольника (например...
Устройство для перемещения, преимущественно, руки манипулятора

Номер патента: 1291384
Опубликовано: 23.02.1987
Автор: Флейтман
МПК: B25J 7/00, B25J 9/00
Метки: манипулятора, перемещения, преимущественно, руки
...к нему напряжения питания. Поэто му знак напряжения источника питания может являться источником информации для включения или выключения прижимов 1 и 12.В этом случае надобность в датчике 14 скорости отпадает и на систему управления поступает переменное напряжение, соответ О ствующее тому, которым питается вибратор 7 (меньшее по величине).Устройство работает следующим образом.Вибратор 7 возбуждает колебания входного вала муфты 8 и через поводок 4 колебания направляющей 2, Система управления подает импульсы на обмотку муфты 8 в зависимости от направления вращения вала вибратора 6. Если необходимо, например, обеспечить поворот каретки по часовой стрелке, то импульс управления поступает тогда, когда вал 6 совершает вращение также по...
Микроманипулятор

Номер патента: 1297798
Опубликовано: 23.03.1987
Авторы: Андрюшкявичюс, Рагульскис
МПК: A61B 5/05, B25J 7/00
Метки: микроманипулятор
...другой электрод 8, выполненный в виде металлического заостренного стержня.К изолирующей муфте 7 закреплен микро инструмент 9. Электроды 6 и 8 подключены к источнику 10 постоянного напряжения, при этом последовательно подключен микроамперметр1. Пьезопреобразователи 2 и 4 и пьезокерамическая мембрана 5 подключены к источнику напряжения (не ЗО показано).Микроманипулятор работает следующим образом.Подается напряжение на пьезопреобразователь 2, который, деформируясь, осуществляет грубое наведение микроинстру- З 5 мента 9. Величина деформации пьезопреобразователя 2 пропорциональна подаваемому напряжению.Путем подачи напряжения от источника0 постоянного напряжения создают раз 40 ность потенциалов между электродами 6 и 8, после чего от источника...
Микроманипулятор для сферических объектов

Номер патента: 1366385
Опубликовано: 15.01.1988
Авторы: Богатыренко, Кваша, Никитенко, Тырса
МПК: B25J 7/00
Метки: микроманипулятор, объектов, сферических
...на основании 1, при-. жимным устройством 7.Прижимное устройство 7 состоит из шариковых опор 25 и дисков 26, котоРые усилием пружин 27 подпружинивают 55 1 13663Изобретение относится к приборостроению и может быть использованодля высокоточного перемещения сферических объектов.Цель изобретения - повышение точ 5ности позиционирования за счет ликвидации люфтов в кинематической цепи.На фиг.1 схематически представленмикроманипулятор; на фиг.2 - то же,вид .сверху; на фиг,З - разрез А-А наФиг.2.Микроманипулятор состоит из основания 1, верхней 2 и нижней 3 платформы с ведущими 4 и ведомыми 5 частями (ползунами), связанными междусобой параллелограммным механизмом 6,прижимного устройства 7, держателей8 сферического объекта 9 и двухкоординатного...
Привод микроманипулятора

Номер патента: 1366386
Опубликовано: 15.01.1988
МПК: B25J 7/00
Метки: микроманипулятора, привод
...цилиндра 1 возникает равнодействующая сил, одна из которых перемещает рамку вдоль оси Х, а вторая пытается ее повернуть вокруг вертикальной оси 2, то для полученияоднонаправленного перемещения вдоль оси Х необходимо зафиксировать стакан 13 относительно неподвижного основа-ния 16, подав напряжение на обмотку электромагнитного фиксатора 19, иссключая тем самым возможность поворота стакана 13.При необходимости изменения направления движения выходного звена, т.е. стола 8, изменяется фаза включения электромагнитов 11 и 12, т.е. при вращении цилиндра 1 по часовой стрелке включается электромагнит 11, а при вращении против часовой стрелки - электромагнит 12. Стол при этом будет направленно перемещаться в отрицательном направлении оси Х, т.е....
Микроманипулятор

Номер патента: 1390013
Опубликовано: 23.04.1988
Авторы: Бондарев, Иванов, Попов, Хохлов
МПК: B25J 7/00
Метки: микроманипулятор
...орган, который устанавливается на стержне 8. Последний установлен на П-образных скобах 9, выполненных из плоских пружин, поверхности боковых сторон которых расположены перпендикулярно оси вала 5. Скобы 9 закреплены одними своими сторонами на кронштейне 10, жестко связанном с валом 5, а другими крайними сторонами - со стержнем 8. Мембранные коробки связаны с источником давления (не показан).30 Микроманипулятор работает следующим образом.При подаче давления, например, в мембранную коробку 2 поперечного перемещения исполнительного органа, которая при этом, воздействуя через тягу на вал 5, поворачивает его в шарнире 6 в горизонтальной плоскости. При этом два упругих стержня 4 тяги мембранной коробки 3 изгибаются и не препятствуют этому...
Микроманипулятор

Номер патента: 1414623
Опубликовано: 07.08.1988
Авторы: Боков, Егоров, Поляков
МПК: B25J 7/00
Метки: микроманипулятор
...движении исполнительного органа,например, влево с помощью соответствующего промежуточного усилителя 11 через пневмораспределитель 10 в каналы 9 подается сжатый воздух и обойма 6 всплывает. Во время всплытия контроллер 12 опрашивает датчик 16 о наличии контакта между обоймой 6 и основанием 1. Как только этот контакт нарушается, от контроллера 12 поступает сигнал на один из пневмораспределителей 8, обеспечивающий подачу сжатого воздуха в канал 7, выход которого расположен слева от оси обоймы 6, последняя под действием этого давления перемещается влево.Контроллер 12 переходит к опросу датчика 13 контакта и при наличии контакта между обоймой 6 и корпусом 3 пре Формула изобретения Микроманипулятор, содержащий установленный на основании...
Привод микроманипулятора

Номер патента: 1425077
Опубликовано: 23.09.1988
Автор: Боков
МПК: B25J 7/00, G05B 11/44
Метки: микроманипулятора, привод
...могут осуще:твляться одновременно.Формула изобретения1. Привод микраманипулятара, содержащий корпус, внутри ка".араго усИ зобретение относится к работотехнике.Целью изобретения является расширение технологических возможностейпутем обеспечения управляемых угловых перемещений рабочего органа.На. Фиг. 1 изображена конструктивная схема привода микроманипуляторайа Фиг. 2 - разрез А-А на Фиг. 1;а Фиг. 3 разрез Б-Б на Фиг. 1;. Иаиг. 4 - пневматический усилитель.Привод микраманипулятора содержитрабочий орган 1, который установленс зазорами по трем координатам в кор" ,"5усе, состоящем из основания 2 крышКи 3 и стенок 4-7, в которых выпал",нены попарно расположенные, например,пневмостатические карманы соответственно 8-13, образующие...
Манипулятор

Номер патента: 1433788
Опубликовано: 30.10.1988
Авторы: Гульбинскас, Зикас, Рагульскис, Шаткус
МПК: B25J 7/00
Метки: манипулятор
...на оси поворотной обоймы 4 на равном расстоянии друг от друга.Манипулятор работает следующим образом.При подаче синусоидального напряжения резонансной частоты на пьезоэлектрический элемент (не показан) любого из вибродвигателей в нем возбуждаются про 5 10 15 20 25 30 г 40 45 50 дольные и изгибные колебания. Концы пьезоэлектрического элемента совершают эллипсообразное движение и ввиду наличия силы сухого трения в контакте между ними и поверхностью сопряженной детали появляется движущая сила, которая и перемещает подвижную деталь. При подаче синусоидального напряжения на пьезоэлемент вибродвигателя 7 привода перемещения каретки 2 последняя перемещается по координате Х. Перемещение по координате У осуществляется от вибродвигателя 8 привода...
Способ управления микроманипулятором

Номер патента: 1445942
Опубликовано: 23.12.1988
Авторы: Наумавичюс, Рагульскис
МПК: B25J 13/00, B25J 7/00
Метки: микроманипулятором
...Р(1), при котором в системе (объект 6 - упругий элемент 7) не возбуждаются паразитные резонансные колебания, Это достигается лишь в том случае, если ускорение объекта 6, вызванное воздействием управляющего усилия Г (1), в начале и конце перемещения объекта 6 равно нулю. Это, условие удовлетворяется следующим законом изменения ускорения:о щхг=0 ьп --о Т при 1(0;при 01 Т;5 при 1)Т,где хг - максимальное значение ускоренияобъекта 6;Т - длительность периода сигнала управления.Для получения такого закона ускоренияхг с помощью блока 16 формируют электрический сигнал по формулеЦ 7 =1 гх з 1 п -г%,15при 1(0;при 01 Т;при 1)Т,где 1.1 м - амплитудное значение сигналауправления,и подают на исполнительный механизм 8,преобразующий электрический...
Микроманипулятор

Номер патента: 1450996
Опубликовано: 15.01.1989
Авторы: Гульбинскас, Любинас, Рагульскис
МПК: B25J 7/00
Метки: микроманипулятор
...5 соединеы между с бой электрически и подключены к соо ветс вующим выходам коммутатора 6 питания. Сдин торец привода 3 жестко нрикрепле К основанию 1, а к другому торцу жестко Прикреплен рабочий орган 2. Сплошные электродыы всех пластин также электрически соединены между собой и подключены к источнику питания (не показан). Расположеие пластин 4 в приводе может быть любым, о наиболее целесообразным является их азмещение сплошным электродом к сплошому, а разделенным - к разделенному,Микроманипулятор работает следующим Образом.Пусть на половину секторов 5 привода 3 ерез коммутатор 6 подается напряжение питания величиной +l, а на диаметрально противоположную половину - У (фиг. 2), 1; огда одна сторона каждого пьезоэлектрического ди:ка 4...
Микроманипулятор

Номер патента: 1458206
Опубликовано: 15.02.1989
Авторы: Бондарев, Иванов, Попов, Хохлов
МПК: B25J 7/00
Метки: микроманипулятор
...7. Лгл 8 )1 3 г в).-",.П 11 соотВетств;.ВО с;)абг)ими: ембрг.цны)л)л Короб)КБЬ 111 г ИВЕ) ТП.а Лг 1 ГЭГЬ) 1 Пс ГЕРЕНО 1 О ПЕРСМЕ 1 гЬЦЯ Ц г Рыла О,г Компенсаторы 10 давле)ця содержат гер)ле ъзирова 51 цье )тспо)цтель 1 ые ме;бранные коробки 1;"13 и кесткие скобы 1 г,-16 ацьг;ОГч нь)з рабочим коробкам ч, Гермет изк ) ова,пые мембран)гые коробки 11-13 у.тгяовглелы ПОСЛ ЕДОватРЛЬНС С г)абог 1 ЛМП 1 ЛЕб) ац - ЦЬ 1 ГИ КОГ)Обкамц .-6) СООТГ НЕТ ". ГЕЯ).0 г;.1 гпа С ТОПО НЯ ГЕ РМЕТН ЗИ) Ова ЛНХ ЛО" ПОЛци ГЕЛЬ 1 Ь)Х . Е)бр:1 НЬ:Х Кг)ребг К 1 вООраа)Е 1 "Эя П СОрс.г рг )г)Ч 1 г Г." гацнь)Х КОр (11 ОК гф "/ ЕоКО :а Кр Ег ЭЕ ца "а Осцовапи)л 17, а д;)уга): соединена жесткими скосамь 14-с соотве". - ствую 1:.1 ьцл .;,:бочи.г 51 ыемо:.Гць 5)и...
Устройство для манипулирования объектами в закрытой камере

Номер патента: 1472248
Опубликовано: 15.04.1989
Авторы: Бондарев, Иванов, Колесников, Попов, Хохлов
МПК: B25J 21/00, B25J 7/00
Метки: закрытой, камере, манипулирования, объектами
...оси 4015. На другом конце стержня 12 закреплен магнит 20 ведомой части магнитной муфты. Магнит 21 ведущей частиэтой муфты закреплен с возможностьюрегулировочного перемещения винтом 22 45в обойме 23, установленной на кронштейне 24 трехкоординатного привода25. Стакан 16 взаимодействует с приводом 25 через бобьппку 26 и мембрану 27, закрепленную в корпусе 3.Устройство работает следующим образом.При вертикальном перемещении кронштейна 24 трехкоординатного микроманипулятора 25 вверх движение переда-. 55ется через магнитную связь магнитов20 и 21, взаимодействующих разноименными полюсами, держателю 13 микроинструмента, жестко закрепленному на стержне 12, и последний поворачивается вокруг оси 15. При этом происходит вертикальное...
Устройство для управления прецизионным микроманипулятором

Номер патента: 1504090
Опубликовано: 30.08.1989
Авторы: Наумавичюс, Рагульскис
МПК: B25J 13/00, B25J 7/00
Метки: микроманипулятором, прецизионным
...блока 21 двухкратного интегрировапри 1) Тг,где (/ии и Ь.о - - амплитудные значения управляющих напряжений;Т и Т - длительности периода сигнала управления.Формирователь 8 работает следующим образом.Сигналом блока 25 запускается ждуший мультивибратор 26, который вырабатывает олин прямоугольный импульс длительностью Т. Последний запускает генератор 27 гармонических колебаний. Период гармонических колебаний равен длительности Т. При окончании импульса мультивибратора 26 колебания генератора 27 затухают. Далее колебания генератора 27 подаются на один вход ключа 28, на другой вход которого подается импульс ждущего мультивибратора 26. Ключ 28 открывается только на время, равное длительности импульса Т. Таким образом, на выходе ключа 28...
Микроманипулятор

Номер патента: 1511106
Опубликовано: 30.09.1989
Авторы: Мгебришвили, Панозишвили
МПК: B25J 7/00
Метки: микроманипулятор
...органа микроманипулятора.На фиг, 1 изображен микроманипулятор, разрез; на фиг. 2 - разрез А - А на фиг. 1.Микроманипулятор содержит расположенный в корпусе электромагнит 1 с планкой 2 (якорем), храповой механизм, состоящий из стеряня 3 с закрепленным на нем коромыслом 4 (храповой собачкой), к которому прикреплены две пары зубьев 5, пружины 6, храпового колеса 7, а также шарики 8, опору 9, исполнительный орган, состоящий из винта 10 и держателя 11 микроэлектродов, электромагнит 12 с планкой 3 (якорем) для автоматического изменения направления движения исполнительного органа.Микроманипулятор работает следующим образом.При включении электромагнита 1 планка 2 перемещает стержень 3 с закрепленным на нем коромыслом 4 и с помощью...
Микроманипулятор

Номер патента: 1541042
Опубликовано: 07.02.1990
Авторы: Гермашева, Курносиков, Ряднов
МПК: B25J 7/00
Метки: микроманипулятор
...и может быть исполь-зовано для прецизионных микроперемещений юстируемой детали в приборо 5строительной, электронной и другихотраслях техники.Цель изобретения - повышение точности перемещения исполнительногооргана за счет уменьшения шага перемещения винтовой передачи.На чертеже изображен микроманипу, лятор, общий вид, разрез,Микроманипулятор содержит шаговыйдвигатель 1, соединенный с корпусом2, направляющую вилку 3, кинематичес"ки связанную с дифференциальным винтом 4, Гайка 5 жестко соединена скорпусом 2, Ходовая гайка 6 и исполнительный орган 7 имеют возможностьперемещения в направляющих 8, зафик"сированных винтами 9. Исполнительныйорган 7 установлен между двумя упругими элементами 10 и 11, выполненными, например, в виде...
Устройство для шагового перемещения манипулятора

Номер патента: 1563964
Опубликовано: 15.05.1990
Авторы: Диперштейн, Сахно, Флейтман
МПК: B25J 7/00, B25J 9/00
Метки: манипулятора, перемещения, шагового
...показана связь со шкивом 25 двух гибких тяг, основной 6 и допол,нительной 13, соединенных с фиксатором 8 и дополнительным Фиксатором 14, взаимодействующих с одной направляюЩей 2, 30На фиг.5 показано соединение гибких тяг 5 и 6, соединенных с фиксаторами и шкивом 4, при котором они наматываются на шкив 4 противоположными поверхностями. Устройство работает следующим об 35 разом.Двухпозиционный привод крутильных колебаний 3 возбуждает крутильные колебания шкива 4 (фиг.1), эти колеба 40 ния через гибкие тяги 5, 6 передаются фиксаторами 7, 8, Пружины 9, 10 способствуют возврату Фиксаторов в исходное положение. Синхронно с колебаниями фиксаторов 7, 8 на них посту пают импульсы электрического тока, в результате чего они, периодически...
Манипулятор

Номер патента: 1632772
Опубликовано: 07.03.1991
МПК: B25J 7/00
Метки: манипулятор
...связанного с ним сепаратора 2, верхней 3 и нижней 4 платформ с упруго присоединенными к ним держателями 5 и 6 сферического объекта. Манипулятор имеет ролик 7, установленный в подшипниках на неподвижном сепараторе 2 так, что его ось вращения перпендикулярна оси 0 манипулятора, и два шарика 8,одинакового с роликом 7 диаметра, установленных в вырезах сепаратора без соприкосновения с его стенками. Междушариками 8 в подшипниках, установленных в сепараторе 2, помещен фрикционный вал 9, вращаемый приводом вокруг оси, совпадающей с осью О, микроманипулятора. Шарики 8 прижимаются к валу 9 прижимными цилиндрическими роликами 10 с усилием, достаточным для создания фрикционного контакта за счет предварительного 510152025 Манипулятор работает...