Патенты с меткой «модуль»
Программируемый управляющий модуль
Номер патента: 1649507
Опубликовано: 15.05.1991
Авторы: Агеенко, Валов, Сперанский, Тимонькин, Ткаченко, Улитенко, Харченко
МПК: G05B 19/08
Метки: модуль, программируемый, управляющий
...МК проверяет готовность системы к передачеот 11-го модуля Е-му модулю (группе модулей) АКУ,На четвертом выходе дешифраторапризнака 8 формируется сигнал запросасостояния шины данных, адреса и режима. Этот сигнал поступает на соответствующий Б-й вход определителя приоритета 37. Если в этом такте работы системы на определитель 3 приоритетасигналов запроса от других модулей непоступило, то он формирует на своем11-м выходе сигнал разрешения пользования общесистемными шинами в следующемтакте работы системы. В противном случае такой сигнал формируется на другом выходе определителя 37 приорите 1649507тов, который соединен с входом 34 ответа на запрос другого более приори" тетного модуля системы, При нулевом . сигнале ответа на запрос на входе...
Противоперегрузочный модуль манипулятора

Номер патента: 1650435
Опубликовано: 23.05.1991
Авторы: Асауленко, Котелевский
МПК: B25J 19/00, B25J 19/06
Метки: манипулятора, модуль, противоперегрузочный
...при ГКНТ СССР 113035, Москва, Ж, Раушская наб 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул.Гагарина, 101 Изобретение относится к машиностроению и может быть использовано в робототехнике.Цель изобретения - расширение функциональных возможностей. 5На чертеже показан модуль, общий вид. Модуль содержит корпус 1 со сферической полостью, в которой размещен сферический элемент 2 с выполненными в нем 10 выемками.Напротив каждой выемки в корпусе 1 выполнено отверстие, в котором установлены регулировочный винт 3, пружина 4, шайба 5 и шарик 6, образующие шариковый 15 фиксатор. Сферический элемент 2 жестко связан со стержнем 7. Поджимная пластина 8 подпружинена пружинами 9 относительно корпуса 1, Сила поджима...
Многофункциональный логический модуль

Номер патента: 1654808
Опубликовано: 07.06.1991
Авторы: Гикошвили, Имнаишвили, Кешелашвили, Натрошвили, Пепанашвили
МПК: G06F 7/00
Метки: логический, многофункциональный, модуль
...- упрощенисчет уменьшения аппараМногофункциональный лодуль содержит элементэлементов И 2.1-2.2",группу элементов НЕ 4.мента НЕ 5 и 6. В завизначения сигнапа на стде модуль позволяетлогические Функцииили работает как ав имости отобирующем вхоализовать все1654808 единичного состояния в нулевое эле" ментом НЕ 5 осуществляется блокировка приема информации на элементы И 2.1-2.2 группы, а на выходе 10имодуля сохраняется значение функции, вычисленное в предыдущем такте. Таким образом, кроме вычислениявсех Функций от и переменных модульможет быть использован как автоматс памятью. Формула из обр ет ения Многофункциональный логический модуль, содержащий, первый элемент НЕ, элемент И и мультиплексор, состоящий из М элементов И, п. элементов НЕ...
Уборочный модуль капустоуборочной машины

Номер патента: 1653603
Опубликовано: 07.06.1991
Автор: Игнатченко
МПК: A01D 45/26
Метки: капустоуборочной, модуль, уборочный
...ЗРП 2 и размыкающиеся контакты ЗРПЗ и ЗРП 4 (фиг, 11), мостовую измерительную схему 34, к одному из плеч которой подключены направляющая труба 3 и спираль через сопротивление 35, усилитель 36,сигнальную лампу 37, звонок 38, кнопку "Стоп" 39, выключатель 40.Уборочный модуль может быть установлен на самоходном шасси 41 арочного типа (фиг, 10) посредством тяг 42 и 43 и подпружиненной тяги 44. Регулировкой натяжения пружины 45 достигается плавное перемещение подбирающей спирали по вертикали, что обеспечивает копирование ею рельефа и надежный захват кочанов капусты, Перемещение модуля в транспортное положение производится гидроцилиндром 46,Регулировочное управление гидроприводом передвижения самоходного шасси осуществляется, например, реле...
Одноосный колесный энергетический модуль

Номер патента: 1654027
Опубликовано: 07.06.1991
Автор: Промзалев
МПК: B60D 7/00
Метки: колесный, модуль, одноосный, энергетический
...устройства поворотного блока 5 поворачивают до совпадения впадин с фиксаторами запорными 6, которые, перемещаясь радиально от центра, входят во впадины кольца 5, освобождая кольцевую проточку шарнира сменного обоРудования 15, заднего моста 14. Опускают заднее дополнительное управляемое колесо 7 и закрепляют штангой 9, опускают переднее дополнительное колесо 10 и фиксируют штангой 13, производят регулиРовку положения колеса 10 по высоте винтом 11 до сжатия рессоры 12, обеспечивающей надежное прижатие заднего дополнительного колеса 7 к почве.Задний мост 14 затормаживают, фиксируют, колесный энергетический модуль передвигают, шарнир 15 сменного оборудования выходит из зацепления с управляемымгоризонтальным шарниром 4, задний мост14...
Робототехнический модуль для транспортировки и разборки деталей раскроя

Номер патента: 1655677
Опубликовано: 15.06.1991
Авторы: Александров, Баландин, Прокудин, Фатеев
МПК: B25J 9/00
Метки: модуль, разборки, раскроя, робототехнический, транспортировки
...толкатели 9самоходной платформы 3 расположены попринципу равностороннего треугольника спостоянным шагом. Робототехническийкомплекс оснащен накопителями 16 деталей 17.Робототехнический модуль работает следующим образом.Приняв детали в объеме раскроя безпотери ориентации в принятой системе координат, самоходная платформа 3 по направляющим 4 приводом 15 из зоны резанияперемещается на позицию разборки. Здесьвозможны три варианта взаимного переме щения портала 1 и самоходной платформы3 с целью сокращения времени разборки ихолостых пробегов согласно карте раскрояи распределения его по технологическиммаршрутам, заложенной в управляющейпрограмме;Портал 1 позиционируется на оси заданного контейнера 16, Платформа 3 совершает поступательное шаговое...
Многофункциональный логический модуль

Номер патента: 1656521
Опубликовано: 15.06.1991
Авторы: Авгуль, Антонов, Егоров, Криницкий
МПК: G06F 7/00
Метки: логический, многофункциональный, модуль
...для реализации бесповторных логических функций трех переменных.Цель изобретения - расширение функциональных возможностей за счет реализации бесповторных логических функций трех переменных.На чертеже представлена схема многофункционального логического модуля,Модуль содержит четвертый 1, второй 2, третий 3, первый 4 элементы РАВНОЗНАЧНОСТЬ, первый, второй, третий 5, 6, 7 информационные вход, первый 8 и второй 9 настроечные входы, выход 10.Модуль работает следующим образомНа информационные входы 5, 6 и 7 подаются двоичные переменные х 1, х 2 хз соответственно, на настроечные входы 8 и 9 - сигналы настройки 01 и 02 соответственно, значения которых принадлежат множеству (О, 1). На выходе 10 реализуется некоторая бесповоротная...
Модуль нейроподобной сети

Номер патента: 1656565
Опубликовано: 15.06.1991
Авторы: Амосов, Куссуль, Рачковский
МПК: G06G 7/60
Метки: модуль, нейроподобной, сети
...блока 1, Это значение подается на второй вход блока 3 вычисления значений функций. Блок 3 предназначен для вычисления значений некоторого набора функций (Р 1,Рц) регулирОвания уровня ВыходнОЙ активности модуля нейроподобной сети, Аргументом этих функций является уровень выходной активности блока нейроподобных элементов, подаваемый на второй вход блока 3, а множество значений принадлежит интервалу 0, 1), Вид функции регулирования Определяет зависимость уровня выходной активности А модуля нейроподобной сети от уровня выходной активности В блока 1 нейроподобных элементов. Выбор нужной функции регулирования из имеющегося набора осуществляется подачей внешнего управляющего сигнала со сторо. ны сети на первый вход блока 3. Таким образом, к...
Модуль промышленного робота

Номер патента: 1657371
Опубликовано: 23.06.1991
Авторы: Алексеев, Березников, Карпов, Ращинский, Федорин
МПК: B25J 17/00, B25J 19/06, B25J 9/08 ...
Метки: модуль, промышленного, робота
...через муфту 5. Основная полость 6, образованная внутри полого корпуса 1 и выходного звена 2, соединена каналом 7 и трубопроводом 8 с источником воздуха; не содержащего паров агрессивных сред, или с устройством генерации воздуха, не содержащего паров агрессивных сред. В полом корпусе 1 выполнены расточки, образующие дополнительные полости 9. Причем дополнительные полости 9 связаны посредством каналов 10 между собой и через трубопровод 11 с источником вакуума или с устройством генерации отрицательного давления (не показан) и изолированы от основной полости 6 и внешней среды спаренными уплотнениями 12 и 13. Основная полость 6 отделяется от внешней среды в местах подвижного соединения полого корпуса 1 и выходного звена 2 спаренными...
Фотоэлектрический модуль

Номер патента: 1657892
Опубликовано: 23.06.1991
Авторы: Алиев, Муругов, Стребков
МПК: F24J 2/00
Метки: модуль, фотоэлектрический
...солнечные батареи 1 в стеклянных герметичных газанаполненных капсулах 2, имеющих контактный вывод 3 с одного торца, а также несущую раму 4 и общую шину 5 с контактными разъемами, проложенную по одной из сторон рамы 4, Последняя выполнена из эластичного материала с карманами 6 для крепления внатяг капсул 2 с двух их сторон. Противоположные карманы 6 соединены попарно эластичными перемычками 7.Модуль работает следующим образом.После окончания транспортировки несущая рама 4 раскладывается на опоре с ориентацией на юг под углом наклона, равным широте местности. Стеклянные капсулы 2 вставляются в карманы 6 рамы 4, При этом контактный вывод 3 капсулы 2 стыкуются с контактным разъемом шины 5. В результате фотовольтаического...
Токарный модуль

Номер патента: 1660935
Опубликовано: 07.07.1991
Авторы: Дьяченко, Евглевский, Кузнецов, Лисицкий, Лоев, Мирошниченко
МПК: B23Q 3/155
Метки: модуль, токарный
...и перемещается по инерции в позицию смены инструмента в магазине инструмента, где осуществляется торможение каретки за счет действия пружины 19 на упор 41.Защелка 24 захватывает штырь 39, при этом упор 41 поджимает пружину 19, Рука.11 перемещается к магазину инструмента 4. От штока силового цилиндра 20 каретка перемещается к магазину инструментов, Инструмент входит в гнездо магазина инструмента 4, Захват расфиксируется, отпускает инструмент, Рука 11 перемещается от магазина инструментов. Осуществляется поворот магазина инструментов до позиционирования нужного инструмента в позиции смены,Рука 11 перемещается к магазину инструментов, осуществляется захват инструмента. Каретка 10 перемещается от магазина 4 инструментов под действием...
Гибкий производственный модуль

Номер патента: 1660938
Опубликовано: 07.07.1991
МПК: B23Q 41/02
Метки: гибкий, модуль, производственный
...патрон 6 шпиндельной бабки 4 зажимает, а патрон 5 шпиндельной бабки 3 отжимает обработанную с одной стороны заготовку 24, Затем шпиндельная бабка 4 перемещается назад и после ее остановки производится обработка второй стороны заготовки 24 двумясуппортами 18 с инструментальными головками 19, При этом загрузочный манипулятор 7 транспортирует вторую заготовку 11из магазина 10 к патрону 5 шпиндельнойбабки 3, где производится ее механическаяобработка.После окончания механической обработки заготовки 24 в патроне 6 шпиндельной бабки 4 манипулятор 7 транспортируетзаготовку 24 к магазину 10 и укладывает еев освободившееся в магазине гнездо, Затемцикл повторяется,Смена затупившегося в результате ме. ханической обработки инструмента в головке 19...
Многофункциональный модуль

Номер патента: 1661751
Опубликовано: 07.07.1991
Авторы: Аляев, Екимов, Овчинников, Рачинский, Синегубов
МПК: G06F 7/00
Метки: многофункциональный, модуль
...вторым входами первого элемента И, выход которого соединен с первым входом первого элемента ИЛИ, второй вход которого соединен с выходом второго элемента И, первый вход которого соединен с третьим входом модуля и первым входом второго элемента ИЛИ, второй вход которого соединен с четвертым входом модуля, пятый вход которого соединен с первым входом третьего элемента И, второй вход которого соединен с первым входом третьего элемента ИЛИ и выходом четвертого элемента И, первый вход которого соединен с шестым входом модуля, седьмой вход которого соединен с первыми входами пятого и шестого элементов И, вторые входы которых соединены соответственно с выходами первого и второго элементов ИЛИ, третий вход первого элемента ИЛИ соединен с...
Многофункциональный логический модуль

Номер патента: 1661752
Опубликовано: 07.07.1991
Авторы: Авгуль, Егоров, Костеневич, Супрун
МПК: G06F 7/00
Метки: логический, многофункциональный, модуль
...первого рабочего синхроимпульса триггер 6 осталсяв нулевом состоянии, подается следующий рабочий синхроимпульс, попереднему фронту которого в триггер 45б записывается значение Р П на данном1наборе аргументов Х 4, Х Х 11(при я 1 = 1), либо подтверждаетсянулевое состояние триггера 6 (при= 0). По заднему фронту этого50синхроимпульса также производитсякольцевой сдвиг информации в сдвиго"вом регистре 2 и увеличение содержимого счетчика 8 на единицу, Если после второго такта триггер 6 остался внулевом состоянии, подается третийсинхроимпульс, по переднему фронтукоторого в триггер 6 заносится значение ЭСБФ Р на данном наборе (приЕсли значение Р=Р(Х,ХХ 11). было вычислено "досрочно" (единичное значение Р было зафиксировано в триггере 6 за 1...
Модуль псевдонейронной сети
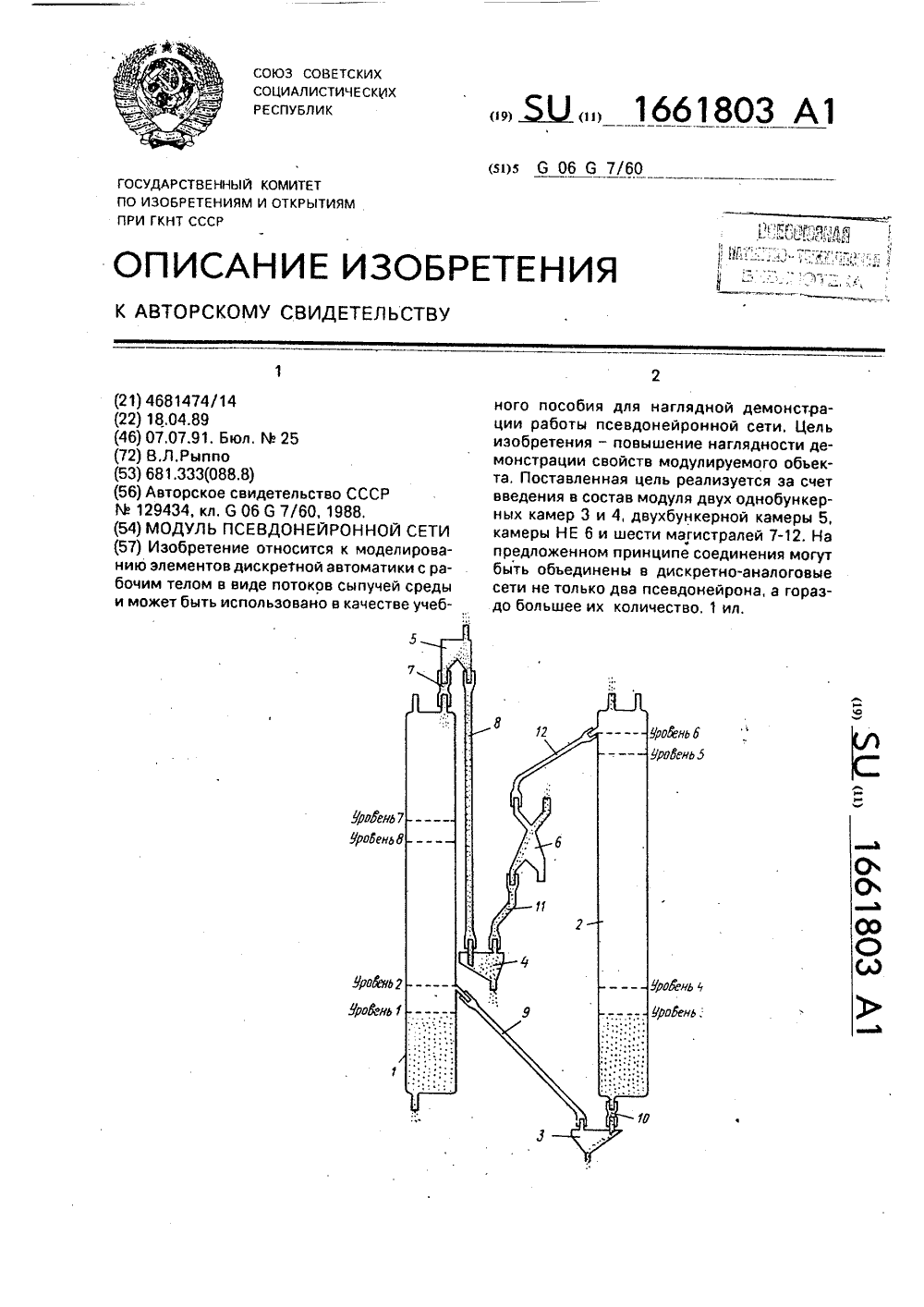
Номер патента: 1661803
Опубликовано: 07.07.1991
Автор: Рыппо
МПК: G06G 7/60
Метки: модуль, псевдонейронной, сети
...его порога, так как повышение сыпучей среды в псевдонейроне соответсвует процессу обучения псевдонейрона.Р е ж и м 2. Снижение порога (повышение уровня сь 1 пучей среды) в одном псевдонейроне - повышение порога(снижение уровня сыпучей среды в соседнем нейроне, Пусть в следующий момент времени сыпучая среда псевдонейрона 1 находится на отметке "Уровень 7" в состоянии динамиче 5 10 15 20 25 30 35 40 ского равновесия, а в псевдонейроне 2 - на отметке "Уровень 5", также в состоянии динамического равновесия. Передача сиг-. нала будет осуществляться от псевдонейрона 2 к псевдонейрону 1, Для этого подается стимул в виде потока сыпучей среды во входной канал псевдонейрона 2, Уровень сыпучей среды в псевдонейроне 2 начнет подниматься и...
Модуль резонансного манипулятора

Номер патента: 1662837
Опубликовано: 15.07.1991
МПК: B25J 9/00
Метки: манипулятора, модуль, резонансного
...2 перейти в другое крайнее положение, прикотором защелка попадает в гнездо звена 2, соответствующее этому положению. Двигатель 5 отключается, а пружина 7 оказывается более закрученной, чем пружина 6. Возможна конструкция привода и с одной пружиной,Подзавод пружины, необходимый при настройке модуля, осуществляется следующим образом. В одно из трех отверстий, расположенных на боковой поверхности .кольца 8 или 9, вставляется сквозь окно 14 корпуса 1 упор 13 (два других отверстия заняты крепежными винтами 12), Если это свободное отверстие оказывается в недоступном месте, выкручивают один из винтов 12, упор 13 вставляют на его место. Удерживая с помощью этого упора кольцо 8 или 9 от поворота под действием соответствующей пружины, ослабляют...
Модуль резонансного манипулятора

Номер патента: 1662839
Опубликовано: 15.07.1991
Авторы: Белов, Кошель, Юрченков
Метки: манипулятора, модуль, резонансного
...добиваются перемещением конца пружины относительно скобы 9, для чего ослабляют натяжение винтов 11, уменьшая силу прижатия пружины к выступающим концам скобы 9, что позволяет освободить конец пружины б или 7 и переместить его в нужную сторону.Подзавод пружины, также необходимый для настройки привода, осуществляется следующим образом, Ослабляют натяжение двух винтов 10 (возможен вариант крепления и с помощью одного винта), уменьшая силу трений между скобой 9 узла крепления и дном направляющего паза на внутренней поверхности корпуса, перемещают узел крепления вместе с зажатым в нем, концом пружины б или 7 вдоль направляющего паза в нужном направлении с последующей фиксацией с помощью тех же винтов 10. Если длины продольного...
Модуль линейного перемещения промышленного робота

Номер патента: 1664546
Опубликовано: 23.07.1991
МПК: B25J 11/00, B25J 9/00
Метки: линейного, модуль, перемещения, промышленного, робота
...1 в одно из крайних положений, . например, правое положение (фиг, 2), Вывод каретки 1 можно осуществить реверсированием силового цилиндра 3, раскачивая каретку 1 до тех пор, пока,она не выйдет в одна из крайних положений. При этом гиокая лента 8 выпрямляется и притягиваетсярабочей поверхности 1 1 ма ни ной плиты О, ибкяя лента 8 3 выпрямлРнном положвнии становится жесткой и фиксирует каретку 1 относительно корпуса 2.Приводная пружина 7 растягивается и запасает энергию, необходимую для перемещения каретки 1 из одного крайнего положения в другое без учета энергии,необходимой на компенсацию сил трения между кареткой 1 и корпусом 2. Для компенсеции потерь энергии, вызываемых силами трения и переменными массами полезного груза, служит...
Многофункциональный логический модуль

Номер патента: 1665368
Опубликовано: 23.07.1991
Авторы: Волченская, Князьков
МПК: G06F 7/00
Метки: логический, многофункциональный, модуль
...функции на счетный вход 6 модуля подается необходимое количество счетных импульсов в соответствии с таблицей настроек, В результате на выходах счетчика 7 будет сформирован настроечный код модуля.Например, для настройки модуля на реализацию функции РХ)-Х 1 ЧХ 2 ЧХзХ 4после подачи на вход 5 сигнала сброса на счетный вход 6 согласно таблице требуется подать три импульса. При этом на информационный вход 1 модуля надо подать сигнал Я 1, на вход 2 - сигнал Х 2, на вход 3 - сигнал Хз, нэ вход 4 - сигнал Х 4. На выходе 18 модуля будет получена логическая функцияЕ(Х) щ Х 1 Ч Х 2 Ч ХЗХ 4 Х 1 Ч Х 2 Ч ХЗ Ч Х 4, 25,ход которого соединен с вторым входом первого элемента ИЛИ, второй вход четвер 30 40 45 50 55 Аналогично реализуются иные...
Многофункциональный логический модуль

Номер патента: 1667046
Опубликовано: 30.07.1991
Авторы: Аспидов, Белков, Ковтун, Мисько
МПК: G06F 7/00
Метки: логический, многофункциональный, модуль
...четырех букв осуществляется согласно табл, 1, в которой приведены настройки на реализацию типовых бесповторных функций,Функции реализуются следующим образом. р требуется реализовать фун1667046 Р 3 Тип реалиэуеыой Фу настроечньи си чение ов на входы 9 ) 10 ( 4 Х 4 х хс х Хс х хз хз хз хэ о о Х 4 1 о хэ э+2+22+1+1(1+ + 1 )91 хз хзХ 4 1 х хз а Хс хг хзХ 4 Х 2хг1 Хэ УЛЮ ДВА, ИЛИхзххэоо Х 2 Хг Х 4 хэ Х 2 Х 4 Хс х о хг 1 Х 2Х 4ХгохзХс Хс1 1хг хз% хз х 4 Х 4 хг хг хз хг хз Хс х И, СУИИА ПОЩс+12+ 91(91) (1+1)й+1) 91)ДУЛЮ ДВА, ИЛИохзх Хэ Х 4 х хг о хзХ 4 Хс хг хз х хэ х хэ хс хгХс хЪ о Х 4 1 хг хз Х 4 Хс Х 4 Х 2 Х 4 Х 2 Х 4 ооХ 4 хз выбирается произвольно.- значение сигнала настройх При этом согласно формуле функционирования1(Х 1, Х 4) Х 1 Х 2...
Модуль для логических преобразований булевых функций
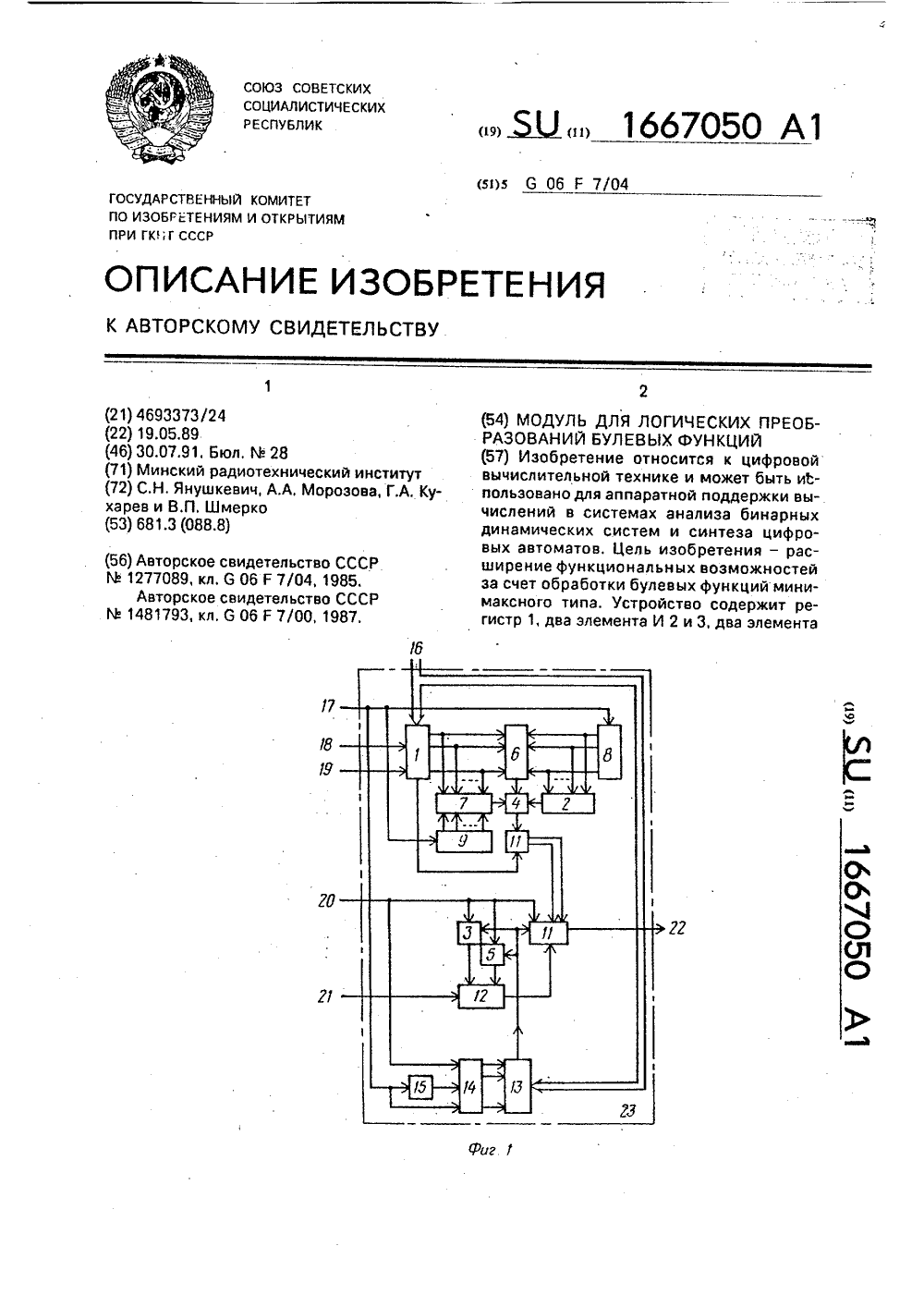
Номер патента: 1667050
Опубликовано: 30.07.1991
Авторы: Кухарев, Морозова, Шмерко, Янушкевич
МПК: G06F 7/04
Метки: булевых, логических, модуль, преобразований, функций
...первом такте суммирующий счетчик 8 переходит из состояния 1 1 в состояние О, О, В результате по перепаду сигнала из "1:" в "0" на первом входе узла 10 пересчета на его выходе формируется код 00, который сохраняется в течение (т) тактов.В т-м такте на выходе первой схемы 6 сравнения в результате совпадения кодов на ее входах формируется сигнал единичного уровня, поступающий на первый вход элемента ИЛИ 4 и далее с его выхода нэ первый вход узла 10 пересчета. В результате по заднему фронту этого сигнала на выходе узла 10 пересчета формируется код 01, который сохраняется до окончания (2" - г) - го такта, 166705045 50 55 В (2 п -т )-м такте на выходе второйсхемы 7 сравнения в результате совпадениякодов на ее входах формируется сИгнал...
Гибкий производственный модуль для листовой штамповки

Номер патента: 1667994
Опубликовано: 07.08.1991
Авторы: Боровитченко, Босов, Годульянова, Дежуров, Кайзер, Пузыревский, Шаров, Шульц
МПК: B21D 43/00
Метки: гибкий, листовой, модуль, производственный, штамповки
...снабжены сменными кодоносителями, количество и расположение 20 25 30 35 40 45 50 55 пробок на которых позволяют закодировать до 256 видов кодов в двоичной системе (не показаны).В случае работы нескольких кодов ГПМ в составе ГПС передача штампуемых деталей при многопереходной штамповке от модуля к модулю осуществляется с помощью передающего устройства 84.ГПМ работает следующим образом, После получения сигнала об окончании штамповки детали одного типа манипулятор останавливается в положении, при котором его схваты 9 выведены из зоны пресса 1. Пустая кассета и заполненная тара опу. скаются на цепи горизонтальноготранспортера 22 и выносятся ими на приемные позиции или в магазины-элеваторы (вертикальные транспортеры), Из...
Полупроводниковый модуль силовой электропреобразовательной установки

Номер патента: 1670722
Опубликовано: 15.08.1991
Авторы: Лаужа, Никифоров, Скольцов, Узарс, Феоктистов, Чаусов, Чуверин
МПК: H01L 23/34, H01L 25/00, H05K 7/00 ...
Метки: модуль, полупроводниковый, силовой, установки, электропреобразовательной
...приборы, теплопроводы 2 и кожух 3, причем каждый теплоотвод выполнен в виде металлического диска 4 со спицами 5, торцы которых скреплены между собой кольцом 6, и снабжен кольцевыми элементами 7, имеющими радиальные прорези 8.Полупроводниковый модуль содержит соосно закрепленные чередующиеся полупроводниковые приборы цилиндрической формы и теплоотводы 2, размещенные в цилиндрическом кожухе 3, Каждый теплоотвод выполнен в виде металлического диска 4 с радиально расположенными спицами 5, торцы которых скреплены между собой кольцом 6, диаметр которого выбран равным внутреннему диаметру кожуха 3, и снабжен кольцевыми элементами 7, имеющими в радиальном сечении Ч-образную форму, которые крепятся к каждой спице 5 при помощи радиальной...
Оптический модуль в системе остаточных классов

Номер патента: 1672444
Опубликовано: 23.08.1991
Автор: Старцев
Метки: классов, модуль, оптический, остаточных, системе
...ранга Ьгд первого операнда при преобразовании А=(а,а 2,ам,.ап, гд) (а, а,ф ап, гд+ Лгд) .,Набор иэ и описанных модулей и соответствующего количества сумматоров может использоваться для сравнения чиселА= (а, а, , а гд )и В= (,/Ь, ,/Зп, гв ),где и - основание СОК;а;3 - остатки по основаниям СОК;гд, гв - ранги чисел А и В,При этом число А приводится с помощью описанных модулей к виду где г 1 д - новый ранг числа А, который вычисляется какгд -- гд +, ( - с 4 )где В - ортогональный базис 1-го основа ния;Р - диапазон СОК;иАВ,еслигд гв,1А = В; если г д = гв,1 15А В, если г д гв,Совокупность модулей может использоваться также для преобразования числа А из СОК в позиционную систему счисления:А- (0,0,.0,гд),тогда А= гд Р.25Формула изобретения...
Агрегатный модуль с чпу для автоматической линии

Номер патента: 1673391
Опубликовано: 30.08.1991
Авторы: Зюбин, Куцевол, Мудраченко, Полуэктов
МПК: B23Q 41/00
Метки: автоматической, агрегатный, линии, модуль, чпу
...программе производится независимая одноврефденная трехкоординатная обработка эагоанки с трех сторон тремя шпинГельными бабками, На одном из агрегатных модулей с ЧПУ ползун 10 с кареткой 11 и шпиндельной бабкой 13 отсутствуют,Смена инструмента 24 в шпиндельной бабке 8 этого агрегатного модуля с ЧПУ производится по программе автооператором смены инструментов 4, установленным на одной из шпиндельных бабок 8 или 13, На рабочей позиции(фиг.4), составленной иэ двух агрегатных модулей с ЧПУ, производится одновременная независимая трехкоординатная обработка двух заготовок, установленных на плитах-спутниках 3, которые базированы и закреплены на столах 2. 5 10 15 20 25 30 35 40 45 50 55 При этом на одной заготовке по программе производится...
Гибкий производственный модуль

Номер патента: 1673395
Опубликовано: 30.08.1991
Авторы: Безрядин, Гаврилко, Кузьмин, Плякин, Склифасовский
МПК: B23Q 41/02
Метки: гибкий, модуль, производственный
...от материала пробы, число вырезаемых заготовок-образцов, координаты их размещения в пробе) и порядок работы робота, транспортно-накопительной системы 2 и станка 5. Оператор, обслуживающий гибкий прои водственный модуль, вручную устанавливает и закрепляет винтами 36 пробу 18 в спутнике 17, Спутник с пробой устанавливается в поворотный корпус 21 основных тисков 15 до упора скоса спутника в выступ 31 корпуса 21, при этом медные пластины 35 и 37 совмещаются. Включается силовой цилиндр корпуса 21, шток 34 поворачивает вокруг оси 32 рычаг 33, который, упираясь в уступ спутника 17, осуществляет прижим скоса спутника к сыступу корпуса 31.Командой от общей системы управления " гибкий производственный модуль вводи;ся в рабогу в автоматическом...
Многофункциональный логический модуль

Номер патента: 1674105
Опубликовано: 30.08.1991
Авторы: Авгуль, Егоров, Кушарев, Свиридович, Черняковский
МПК: G06F 7/00
Метки: логический, многофункциональный, модуль
...Модуль работает следующим образом. На информационные входы 5-8 подаются двоичные переменные Х 1Х 4 соответственно, на настроечные входы 9-12 - сигналы настройки 0104 соответственно. На выходе 13 реализуется некоторая бесповторная логическая функция четырех переменных, 1 ил 1 табл. На выходе 13 реализуется некоторая бесповторная логическая функция четырех переменных, определяемая первообразнойР (Х;, Х 4, О) = Я(01. й (02, Х 4, М (Оз, Хз,М (04, Х 1, Х 2,где й( ) - функция равнозначности;М( ) - функция мажоритарности с порогом два;(П= 01, 02, Оз, 04) - вектор настройки.Значения сигналов настройки и соответствующие им реализуемые модулембесповторные логические функции пред-.ставлены в таблице.Ф ор мул а изобретенияМногофункциональный...
Процессорный модуль

Номер патента: 1674111
Опубликовано: 30.08.1991
Авторы: Владимирский, Душеба, Евдокимов, Пивен, Чернышев
МПК: G06F 7/544
Метки: модуль, процессорный
...40 45 50 55 третьего элемента НЕ 24 (3) формируется положительным фронт сигнала Т 2 второго подтакта, под воздействием которого изменяется состояние выходов второго регистра 20 состояния и который через выход (4) блока 4 управления подается на вход синхронизации сумматора 2, обеспечивая занесение информации с его входов.Таким образом, цикл работы процессорного модуля, содержащий М = 1,Й вычислительных тактов состоит из= 1,М первых подтактов и ) = 1,М вторых подтактов работы.За время первого подтакта каждого такта работы модуля в блоке 1 умножения происходит перемножение операндов, заносимых с первого и второго его информационных входов по положительным фронтам синхросигналов соответственно Т 1 и Тх, поступающим на синхровходы блока 1...
Модуль запоминающего устройства на цилиндрических магнитных доменах

Номер патента: 1674257
Опубликовано: 30.08.1991
Авторы: Воротинцев, Гиль, Нестерук
МПК: G11C 11/14
Метки: доменах, запоминающего, магнитных, модуль, устройства, цилиндрических
...периода поля управления. Первый бит выводится из четной группы регистров хранения накопителя 1 через элемент 11 считывания и поступает на дифференциальный вход усилителя 15 считывания и далее на вход компаратора 17 первой группы и мультиплексор 19. Через 1/4 часть периода поля управления из накопителя 2 выводится следующий бит, через соответствующий усилитель 15 считывания поступает на инверсный вход компаратора 17 первой группы и далее на вход мультиплексора 19, Аналогичным образом через четверть периода из накопителя 3 считывается третий бит и еще через четверть периода - четвертый бит из накопителя 4. В следующем периоде поля управления последовательно из нечетной группы регистров хранения накопителей 1-4 первой группы выводятся...
Модуль грядовой картофелесажалки

Номер патента: 1674718
Опубликовано: 07.09.1991
МПК: A01C 9/00
Метки: грядовой, картофелесажалки, модуль
...ул.Гагарина, 101 Изобретение относится к сельскохозяйственному машиностроению, а именно ккартофелепосадочным машинам, и можетбыть использовано для посадки картофелягрядовым способом с трехрядным размещением растений в гряде с расстоянием междурядами 30.35 см,Цель изобретения - упрощение конструкции.На чертеже изображен модуль картофелесажалки для посадки картофеля в однугряду, вид сверху.Модуль кортофелесажалки состоит иэрамы 1, на которой смонтированы опорныеколеса 2, средний сошник 3, правый 4 и 15левый 5 сошники, правый 6 и левый 7 сферические диски, соединенные между собойобщей осью 8 (другие узлы и детали не показаны).Модуль картофелесажалки работает 20следующим образом.Энергетическое средство (трактор) имодуль сажалки...