F15B 11/12 — имеющим фиксированные промежуточные положения; ступенчатого действия
Позиционный пневмопривод

Номер патента: 1442714
Опубликовано: 07.12.1988
Авторы: Елисеев, Копанев, Суздальницкий
МПК: F15B 11/12
Метки: пневмопривод, позиционный
...включакцуюпневмораспределители 8 и 9, усилитель10, широтно-импульсный модулятор 11и датчик 12 положения. Датчик 12может быть выполнен в виде тенэодатчика, закрепленного на пластине 6 вточках максимальной деформации, Дляувеличения рабочей зоны пневмоприводснабжен дополнительными поворотныммодулем 13 и механизмом 14 поворота, 30при этом пластина 15 дополнительногомеханизма 14 поворота соосна и взаимно перпендикулярна пластине 6. Иодулятор 11 связан с входами 16 и 17пневмораспределителей 8 и 9,Позиционный пневмопривод работаетследующим образом.Первоначально пластина 6 находится в ненапряженном состоянии. Для поворота пневмопривода на модулятор 11 10подается сигнал задания перемещения,при этом на входы 16 и 17 пневмораспределителей 8...
Регулируемый гидропривод

Номер патента: 1446362
Опубликовано: 23.12.1988
Авторы: Алекперов, Бледнов, Ионе, Искендер-Заде
МПК: F15B 11/12
Метки: гидропривод, регулируемый
...поршень 32 с двухсторонним штоком 33. Далее к цилиндру 4 прикреплен болт 34, взаимодействующи с продольным пазом 3поршня "10, а ступица 22 снабжена диаметрально расголоженньми пальцами 36, входящими в пазы 14. Полости 27-30 предварительно заполняются рабочей жсщкостью,Гидропривод работает следукшимобразом.Вместе с маховиком 24 вращают червяк 18, который, в свою очередь. поворачивает червячное колесо 21 со ступицей 22. Ступица 22 посредством пальцев 36 вращает кольцевой подпятник 13 до ся пор, пока ось пазов 14 не будет перпендикулярна к оси цилиндра 4. Поворотом гайки-маховика 8 перемещают цилиндр 4 относительнопоршня 10, тем самым устанавливаяшток 33 в исходное заданное положение,Далее вращают приводной вал 16, например,...
Привод для шагового перемещения

Номер патента: 1446363
Опубликовано: 23.12.1988
Автор: Васильев
МПК: F15B 11/12
Метки: перемещения, привод, шагового
...механизмом изменения его длины.3 з,п. Ф-лы, 3 ил. 2рой 23 для размещения в ней текучей среды или упругого стержня 24 и упругой перемычки 25, соединяющей внутренюю 21 и периферийную 22 части.Устройство регулировки длины упругого стержня 24 (Фиг.3) состоит из винта 26 с левой и правой резьбой, ца концах которого между шайбой 27 и кольцом 28 размещен выступ наконечника 29 с закрепленным внутри кольцевым элементом 13 Кольцо 28 штифтом 30 закреплено на конце винта 26. Реэьбовая вилка 31 входит в проточку обоймы 32, в которой закреплен упругий стержень 24.Привод работает следующим образом.В исходном попожении диафрагма 1 и втулка 3 поц действием пружины 4 занимают среднее положение. При подаче рабочей среды в полость 18 корпуса 2...
Моментный позиционный пневмогидропривод

Номер патента: 1455062
Опубликовано: 30.01.1989
Авторы: Бердник, Болтышев, Гончаров, Захаров, Паршин
МПК: F15B 11/12
Метки: моментный, пневмогидропривод, позиционный
...23 и размещенныевнутри эластичной манжеты 24, установленной в крышке 20 с образованием управляюцей камеры 25. На золотнике 16выполнена кольцевая проточка 26.Моментный позиционный пневмогидропривод работает следующим образом.Выходной вал 9 приводится во врашение при подаче рабочей среды в одноиз полостей, например 3. Жестко соединенные между собой поршень 2, штоки 5и 8 и поршень 11 перемещаются вниз(фиг. 1). При этом жидкость из полости 12через перепускной канал 14 и кольцевуюпроточку 26 золотника 16 (фиг. 1 и 3) вытесняется в полость 13. В заданной точкеначала демпфирования воздух под давлением подается в управляюшую пневмокамеру 17 золотника 16 (фиг, 2). При этомэластичная стенка 18 входит в контактс рельефной поверхностью 7...
Позиционный пневмогидравлический привод

Номер патента: 1455063
Опубликовано: 30.01.1989
МПК: F15B 11/12, F15B 9/02
Метки: пневмогидравлический, позиционный, привод
...расходом жидкости через дроссель 11.Изменяя проводимость дросселя 11 можно изменять скорость привода от нуля до максимального значения. 55Проводимость дросселя1 определяетсявзаимным расположением отверстий 18 в дисках 17. При их перекрытии она равна нулю, а при их совпадении проводимость максимальна,При подаче на правую (фиг. 1) обмотку 13 напряжения определенной полярности в последней возникает магнитный поток, взаимодействующий с магнитным потоком постоянного кольцевого магнита 15. В результате этого взаимодействия магнит 15 повернется на 180 и займет новое устойчивое положение.Поворот магнита 15 происходит вместе с ротором 14 и диском 17. Взаимное положение отверстий 18 меняется. Если они были перекрыты, то теперь они совпадают,...
Шаговый пневмогидравлический привод

Номер патента: 1460435
Опубликовано: 23.02.1989
Авторы: Прогальский, Фролов
МПК: F15B 11/12
Метки: пневмогидравлический, привод, шаговый
...жидкость из полости 6 через открытыйгидрозамок 17 в полость 13 гидроцилиндра 2.Число переключений электропневмо- .управляемых гидрозамков 14-17 опре 30 деляет число совершаемых приводомшагов. Направление движения каретки3 задается подключением к блоку 30электропитания того или иного управляющего входа 28 или 29 пневмораспределителя 11.Для перемещения в режиме непрерывного хода устройство 31 попарноподключает к блоку 30 управляющиевходы 24 и 27 или 25 и 26 пневмораспределителей 20 и 23 или 21 и 22,При этом полости 12 и 13 связанымежду собой через пару открытых гид,розамков 14 и 17 или 15 и 16 и каретка 3 перемещается в одно из край45 них положений, задаваемых жесткими упорами (не показаны),В случае, когда во время перемещения...
Гидравлический позиционный привод

Номер патента: 1460436
Опубликовано: 23.02.1989
Авторы: Богуславский, Герасимов, Игнатов, Сидоренко, Шуваев
МПК: F15B 11/12
Метки: гидравлический, позиционный, привод
...дросселирующего гидрораспределителя 5, штоковой полости 10 гидрощятиндра 7 и поршневой полости 12 дополнительного гидроцилиндра 11 к напорной гидролинии 1 и отсоединение выходагидрораспределителя от сливной гидролинии 2.Величина давления в напорной гидролинии 1 определяется нагрузкой гидродвигателя 3, при увеличении ко-, торой давление растет. Давление в штоковой полости 10 гидроцилиндра 8 частично компенсирует усилие, создаваемое давлением в поршневой полости 9. Активное усилие гидроцилиндров уменьшается и пружины (не обозначены) гидроуправляемого тормоза стремятся увеличить тормозной момент, однако на них действует усилие, создаваемое давлением в поршневой полости 12 дополнительного гидроцилиндра 11. Площадь поршня (не обозначен) со...
Следящий позиционный пневмопривод

Номер патента: 1465634
Опубликовано: 15.03.1989
Авторы: Кистиченко, Погорелов
МПК: F15B 11/12, F15B 9/03
Метки: пневмопривод, позиционный, следящий
...дроссель (на чертеже не показа.н); линия25 - позиционированию поршня 3 в середине хода цилиндра 2 и выхлопу рабочего тела в регулятор 13 давления, настроенный на уровень давлелия Р; линия 26 - позиционированию поршня 3 в конце хода цилиндра 2 и выхлопу рабочего тела из полости меньшего объема в атмосферу через дроссель; линия 27 - позиционированию поршня 3 в конце хода цилиндра 2 и выхлопу рабочего тела из полости меньшего объема в регулятор 13 давления, настроенный на уровень давления РПневмопривод работает следующим образом.Для перемещения штока 4 в заданную координату Х иэ начальной координаты, например вправо по фиг.1, устройство 12 вырабатывает сигнал на вход 20 пневмоклапана 7, который, переключаясь, сообщает полость 5 с...
Гидропривод гидротехнического затвора

Номер патента: 1467135
Опубликовано: 23.03.1989
МПК: B66F 1/08, F15B 11/12
Метки: гидропривод, гидротехнического, затвора
...устанавливается в положение 1, верхний гидро захват 6 выводится из взаимодействия. со штангой 5, затем гидрораспределитель 27 выключается. Гидрораспределитель 14 .устанавливается в положение 11, рабочая жидкость поступаетчерез гидроэамок 23 в поршневую полость 8 гидроцилиндра 1, шток-поршень 3 поднимается вверх, после чеговерхний гидрозахват 6 вводится вовзаимодействие со штангой 5 затвора22, затем гидрораспределители 14 и27 выключаются,Включением гидрораспределителя 28в положение 1 нижний гидрозахват 7выводится иэ взаимодействия со штангой 5, после чего гидрораспределитель 28 выключается, а гидрораспределитель 15 устанавливается в положение 1, шток-поршень 4 поднимаетсяв крайнее верхнее положение до размещения нижнего гидрозахвата 7...
Многопозиционный пневматический модуль линейных перемещений

Номер патента: 1474344
Опубликовано: 23.04.1989
Авторы: Васюков, Елтышева, Завацкий, Кубраченко, Ландо
МПК: F15B 11/12
Метки: линейных, многопозиционный, модуль, перемещений, пневматический
...Конец ленты 7 через наклонный паз 9 в крышках 2 и 3 пропускается в сквозной паз 15 натяжных катушек 8, каждая из которых затем поворачивается вокруг своей оси, наматывая на себя ленту 7. Далее нажимным винтом 11 сухарь 10 поджимается к катушке 8, Аиксируя ее, а следовательно, и намотанную на нее ленту 7.Работает многопозиционный пневматический модуль следующим образом.Перемещение поршня 5 происходит при подаче рабочей среды в одну из полостей 35 или 36. Для перемещения поршня 5 вправо (фиг.5) включаются пневмораспределители 22 и 26, При этом Аиксатор 16 выходит из соответствующего гнезда 17 копирной линейки 18. По мере заполнения полости 35 поршень 5 начинает ускоренно переме щаться к точке позиционирования. Совмещение осей...
Позиционный пневмопривод

Номер патента: 1481501
Опубликовано: 23.05.1989
МПК: F15B 11/12, F15B 9/07
Метки: пневмопривод, позиционный
...образом.В пневмодвигатель 1 с выходным звеном 2, снабженным блоком 5 датчиков обратной связи, через пневмораспределители 3 и 4, управляемые от блока 13 управления, подается и отводится рабочая среда под давлением. В результате выходное звено 2 начинает перемешаться в точку, соответствующую задающим сигналам Хз и/или Чз10 15 20 25 ЗО 35 Таким образом, задавая различные алгоритмы (е;з) переключения коэффициентов, можно получить различные законы изменения координат привода (скорость, перемещение, давлением и др.), в том числе осуществлять адаптивное управление. Это приводит к расширению возможностей по управлению пневмоприводом. В варианте пневмопривода, показанном на фиг. 2, управление переключением коэффициентов осуществляется...
Позиционный пневмогидропривод

Номер патента: 1481509
Опубликовано: 23.05.1989
Авторы: Бердник, Болтышев, Гончаров, Захаров, Паршин
МПК: F15B 11/12, F15B 15/22
Метки: пневмогидропривод, позиционный
...привода будет определяться соотношением между угловым перемещением вала 17 20 и соответствующим ему перемещением научастке демпфирования золотника 22. Так как связующим звеном кинематической цепи вал 17 - золотник 22 является электроманитная порошковая муфта 19, то закон 25 демпфирования привода будет определятьсявеличиной относительной угловой скорости вращения (величиной проскальзывания в единицу времени) ведущей и ведомой полу- муфт 20 и 21. Перемещение золотника 22 регулятора 16 потока происходит под дейЗо ствием результирующего усилия, величинакоторого определяется соотношением между усилием, создаваемым муфтой 19 по оси золотника 22 и усилием, создаваемым пружиной 25 в процессе ее сжатия. Так как при вращении ведомой полумуфты 21...
Пневматический шаговый привод

Номер патента: 1504379
Опубликовано: 30.08.1989
Авторы: Назаров, Таджиев, Талипов, Хасанов, Ширмухамедов
МПК: F15B 11/12
Метки: пневматический, привод, шаговый
...11-14 или 15-18 с одновременным включением захватов 23-26.Второй силовой режим привода используется при необходимости перемещения штоков 19-22 с более тяжеловесными нагрузками. Такая необходимость возникает при работе привода в каче1. Пневматический шаговый привод,содержащий пневмоцилиндр с двухкамерной гильзой, в каждой камере ко торой размещен поршень, взаимодействующий с двусторонним штоком посредством управляемого рабочего захвата,о т л и ч а ю щ и й с я тем, что,с целью расширения Функциональных 50 возможностей путем обеспечения поменьшей мере двух независимых линейных перемещений, привод снабжен дополнительныья штоками, расположенными с наружной стороны гильзы, и до полнительными управляющими рабочимизахватами, жестко...
Многопозиционный привод

Номер патента: 1504380
Опубликовано: 30.08.1989
Авторы: Алешин, Бирюков, Журин, Зарукин, Иванов, Коллин
МПК: F15B 11/12
Метки: многопозиционный, привод
...4 занимают крайнююлевуто позицию, что соответствуетХ-й позиции, 5 10 15 20 25 30 35 40 45 50 55 Если необходимо переместить шток3 вправо на позицию выключателя 29,дпя этого необходимо отключить канал управления 20 и подключить входной канал 17. Пневмораспределитель19 перемещается и встает в левуюпозиттито. Шток 3 при этом начинаетпереиещаться вправо до тех цор, пока поверхностью 32 кулачка 4 не натттмет на толкатель выключателя 29. Перемещение толкателя вызывает замыкание электрических контактов и появление в линии 36 выходного сигналауправления, который, поступая навход 37 электропневмораспределителя38, вызывает появление в канале 11пневматического сигнала управлЕния.Этот сигнал, поступая в камеру 10управления пневмораспределителя...
Позиционный пневматический привод

Номер патента: 1508015
Опубликовано: 15.09.1989
Авторы: Евдокимов, Зуев, Трифонов, Угорова
МПК: F15B 11/12, F15B 15/22
Метки: пневматический, позиционный, привод
...давлений, запаздываний и т. д. Учитывая то, что позиционный привод работает в системах программного управления и заранее по техпроцессу известны координаты выходного штока 2, последовательность их смены и перемещаемые массы, алгоритм управления осуществляется в режиме самообучения ЭВМ, при котором координаты начала торможения х определяется по зависимости:=з,.+ Лх; - ,- координата начала торможенияпри очередной отработке конкретной координаты с конкретного исходного состояния выходного штока 2;- координата начала торможенияпри отработке той же координаты с того же исходного состояния выходного звена в ближайшем предыдущем такте отработки координаты;- величина пробега (знак минус)координаты или величина недохода (знак плюс)...
Позиционный пневмогидравлический привод

Номер патента: 1521935
Опубликовано: 15.11.1989
МПК: F15B 11/12
Метки: пневмогидравлический, позиционный, привод
...привода на обмотки 19 подается нпряжение с нарастающей по требуе При подаче воздуха в одну из рабочих полостей, например 4, исполнительного пневмоцилиндра 1 поршень2 воздействует на шток 3, Шток 3 исвязанный с ним шток 6 гидроцилиндра7 начинают перемещаться вправо (почертежу). При этом жидкость, вытесняемая поршнем 8 из управляющей полости 1 О, перетекает в полость 9 черездросселирующее устройство 11, Скорость перемещения привода определяется расходом жидкости через устройство 11. Изменяя проводимость устройства 11 можно изменять скорость привода от нуля до максимального значения.Проводимость устройства 1 определяется взаимным положением втулки18, сердечника 15, В начальный момент втулка 18 прижата к торцу 16и перекрывает...
Шаговый гидропривод

Номер патента: 1521936
Опубликовано: 15.11.1989
Авторы: Бардин, Герасимов, Хохряков, Яковлев
МПК: F15B 11/12
Метки: гидропривод, шаговый
...толкатель 14, При этом зо;лотник 10 снабжен устройством сигна:лизаиц заданного положения, котороеможет быть выполнено в виде рабочего35окна 15, непосредственно связанногос устройством 16 .управления гидрорас предг,е 1 тгге,г 11 6, либо в виде механи/ческого контакта (не показан 7,Привод работает сттепуюгцим Образом.41".1В исходном состоянии гидрораспределитепь б находятся в нейтральномположении,. Обеспечивая запирание ра- бочих полос Гей 4 и 5 о ьттапан 8 Обесточец и перекрывает слив рабочейготдкост 11, .Золотник 10 занимает краибилттзациго давления в мерной камере 12яа всем рабочем диапазоне переметния золотника 1 О. Величина этого давления, очевидно, определяется величиной давления в камере 13 и соотношением эффективных...
Система программного управления для пневмогидравлических приводов
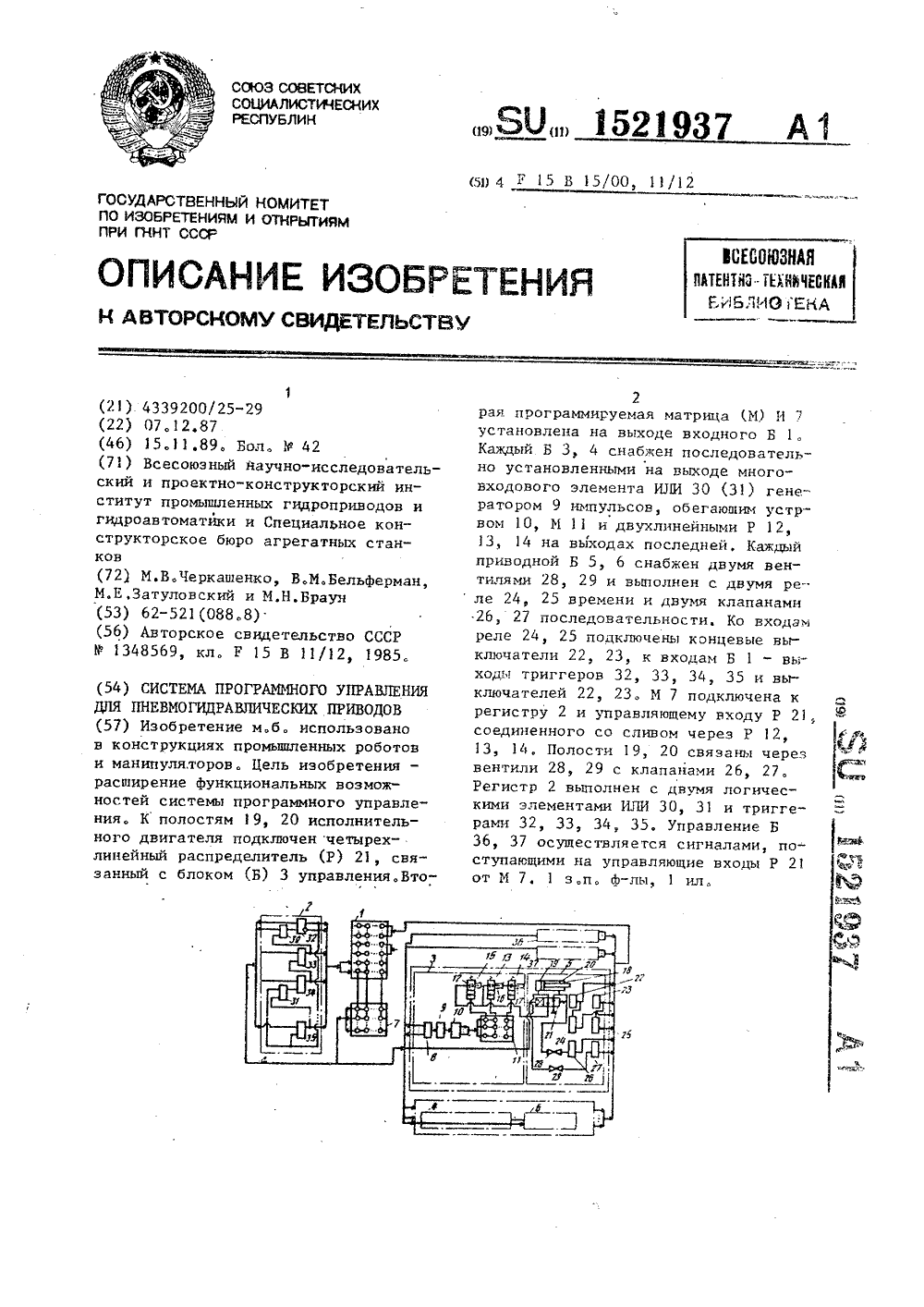
Номер патента: 1521937
Опубликовано: 15.11.1989
Авторы: Бельферман, Браун, Затуловский, Черкашенко
МПК: F15B 11/12
Метки: пневмогидравлических, приводов, программного
...конечного выключателя 23 и реле 25 времени.Управление по циклу осуществляется следующим образом. Сигналы отвнешних устройств и устройств, контролирующих движение исполнительногодвигателя 18, поступают на входывходного блока 1, в котором формируются конъюнкции, выполняющие в соответствии с программой функции, отражающие условия переходов системы.Сигналы с выходов входного блока 1поступают на входы матрицы И 7, гдеформируются дизъюнкции сформирован.ных в блоке 1 конъюнкций, указывающие на многократное срабатывание одних и тех же исполнительных двигателей в цикле1Сигналы с выходаматрицы И 7 поступают в регистр 2, в котором каждыйпредыдущий триггер 32 и 34 отключается сигналом с выхода,.последующего триггера 33 и 35 н включаетсясигналами...
Пневмогидравлический привод тягового устройства

Номер патента: 1523750
Опубликовано: 23.11.1989
Авторы: Кряжевских, Шаповалов, Шишкин
МПК: F15B 11/12, F15B 15/10
Метки: пневмогидравлический, привод, тягового, устройства
...усилия на гибкую ленту (например, кулачковая муфта). Работой клапанов 12-14 управляют конечные выключатели 17, при "этом клапаны 12-14 выполнены электро- управляемыми.Пневмогидравлический привод тягового устройства работает следующим образом.В исходном положении .рукав 5 находится в крайнем левом положении, а рукав 6 - в крайнем правом положе-нии, Распределительный клапан 1 О переключает систему 11 подачи рабочей среды на подачу последней в боковые камеры 2 и 3. При этом замок 7 Фиксирует гибкую ленту 9 и перемещается вместе с ней вправо (по чертежу), а45 замок 8 скользит по ленте 9 без зацепления. Далее распределительный клапан 10 переключает систему 11 на подачу рабочей среды в среднюю камеру 4 и рукава 5 и 6 возвращаются...
Многопозиционный силовой цилиндр

Номер патента: 1525346
Опубликовано: 30.11.1989
Авторы: Бомбешко, Евстратовский, Куцеволов, Маханьков, Сычев, Цереня, Ярошевич
МПК: F15B 11/12
Метки: многопозиционный, силовой, цилиндр
...при этом жидкость из полости 17 перетекает через отверстие 36 в полость 16, тем самым создается дополнительное сопротивление перемещению основного поршня 8, что способствует плавному схождению поверхностей трения синхронизатора.При дальнейшем перемещении кольцевого поршня 11 малого диаметра открывается канал 33, соединяющий полости 15 и 6, и рабочая среда оказывает силовое воздействие на днище основного поршня 8. В связи с этим усилие становится равным сумме усилий на кольцевом поршне 11 и основном поршне 8. При дальнейшем перемещении кольцевого поршня 11 он упирается в корпус 1, после чего развиваемое усилие становится равным усилию создаваемому основным поршнем 8. Кроме того, поршень 8 взаимодействует с запорным элементом...
Следящий позиционный пневмогидропривод

Номер патента: 1527420
Опубликовано: 07.12.1989
Авторы: Бердник, Болтышев, Захаров, Паршин
МПК: F15B 11/12, F15B 15/22
Метки: пневмогидропривод, позиционный, следящий
...каждой из муфт 19 и 20. Перемещение золотника 16 происходит поддействием результирующего усилия,приложенного к передаче 21, а его замок определяется изменением балансакрутящих моментов, передаваемых муфтами 19 и 20, Перемещение золотника16 вызывает изменение проводимостиканала 15 и соответствующее изменениескорости перемещения штоков 3 и 7.При полном перекрытии канала 15 происходит позиционирование привода взаданном положении,Таким образом, пневмогидроприводпозволяет осуществлять изменение скорости перемещения токов 3 и 7 в соответствии с заданной программой движения. Автономность управляющего устройства, а также точность и быстродействие реализации управляющих сигналов позволяют значительно повыситьчисло возможных точек...
Способ управления позиционным пневмоприводом и устройство для его осуществления

Номер патента: 1534218
Опубликовано: 07.01.1990
Авторы: Гончаров, Звонарев, Петруненко
МПК: F15B 11/12, F15B 9/03
Метки: пневмоприводом, позиционным
...Это совмещение (фиг. 3) определяется пневматическим датчиком 26, который через пневмосистему управления (не показана) давле нием Р( приводит в работу шток 29 пневмоцилиндра 28.Шток 29 закрепленной на нем ви",кой 30 передает усилие дав ения Р( на ка;. Р. Г( 7 и 8 и окончательно устанавливает их и закрепленные на них резьбовые полукольца 19 в рабочее положение.После доворота детали 10 до упора В торец полуколец 9 ее вращение прекращается, при этом происходит проскал(ьзывание фрикционнь(х полух 1 уфт 38 и 39.Установка резьбовых полуколц 19 е ра бочем полож; нии В раз( ер, равнь(ц раз 1 еру жесткого кольца-калибра, Определяется отсчетцым узлом 2 О.Контролируемая резьба считается год)ой Г 10 при вденному среднему диамР пу, если резьбовые...
Позиционный пневмопривод

Номер патента: 1534222
Опубликовано: 07.01.1990
Авторы: Вансявичюс, Гайвянис, Кибиркштис
МПК: F15B 11/12
Метки: пневмопривод, позиционный
...допустимых диаметров выбирают шкив с минимальным диаметром и соответственно ему выбирают образец 13 ремня с длиной, равной длине окружности шкива (Ш) 6. Образец 13 наматывают на Ш 6 и прижимают(51) 5 б 01 М 13/02, 6 01 . 3/04 один его конец болтом 7. Затем на образец 13 опускают шток 3 с роликом 4 для постоянного прижатия к Ш 6 свободного конца образца 13. На тарелку 10 нагружают грузы 11 до тех пор, пока Ш 6 с образцом 13 не сдвинется с начального положения. Значение начального момента То фиксируется. При дальнейшем нагружении фиксируют максимальный момент, при котором Ш 6 поворачивается на 360. Приведенный модуль изгибной жесткости Е определяется из соотношения Е= (То+Т) Р/2(1 - лР/1.) 1, где То - начальный момент, при котором...
Способ подачи длинномерных плоских материалов валками и устройство для его осуществления

Номер патента: 1536081
Опубликовано: 15.01.1990
Авторы: Жиганов, Пугачев, Ровенский
МПК: F15B 11/12
Метки: валками, длинномерных, плоских, подачи
...регуляторов 27, 28 и 29 давления,Затем производят выбор необходимо- Ого усилия зажима полосы, находящейсямежду разведенными валками 1 и 3. Дляэтого по сигналу от датчика (не показан) наличия, например, стальной по"лосы в зоне силового цилиндра 9 при 35водится в действие пневмораспределитель 32, в оезультате чего сжатыйвоздух поступает в силовой цилиндр 9с выхода регулятора 33 давления, настроенного на уровень давления, необходимый для внедрения с заданным усилиемв полосу нажимного наконечника 10.В процессе внедрения наконечника10 в тело полосы происходит локальнаядеформация полосы в зоне острия наконечника 10, В результате возникаетсопротивление внедрению наконечника10 в полосу, По этой причине в полости15 силового цилиндра 9 происходит...
Гидравлический позиционный привод

Номер патента: 1541422
Опубликовано: 07.02.1990
Авторы: Богуславский, Николенко, Сидоренко, Шуваев
МПК: F15B 11/12
Метки: гидравлический, позиционный, привод
...в необходимое положение, Рабочая жидкость иэ напорной гидролинии 1 под 55 водится к гидродвигателю 3, например, по гидролинии 23 и приводит его в движение, Слив иэ гидродвигателя 3 осуществляется по гидролиниям 24 и 2 чевая вращение выходного звена 4. Упругий отскок звена 4 в момент оста- нова не возникает, так как обратный клапан изолирует ГД 3 от воздействия противодавления в гидролинин 2. 1 ил,рез гидрораспределитель 6 и аппарат8, Управляющие полости 17 и 18, гидролинии 19 и 21, полости (не показаны)гидрораспределителя 5 также сообщаются со сливной гидролинией 5. Частотавращения выходного звена 4 определяется проводимостью дросселя 9, ре"гулирование которого производитсяперемещением винта 12 в порыне 11,при этом смещается запорное...
Силовой многопозиционный цилиндр

Номер патента: 1548535
Опубликовано: 07.03.1990
Авторы: Агеев, Алафузов, Егоров
МПК: F15B 11/12, F15B 15/06
Метки: многопозиционный, силовой, цилиндр
...его влево, Вместе с поршнем 2 под дей5 1548535 6 ствием шпонки 15 перемещается кольцевой поршень 11. В варианте, изображенном на фиг.3, перемещение происходит до упора кольцевого поршня 1во фланец корпуса 1. В варианте, показанном на фиг,4, торец поршня 11наезжает на внутреннюю ступенчатуюрасточку 18 поршня 16 и, посколькуполость 3 соединена со сливом, перемещается вместе с ним до упора поршня 16 в корпус 1,В исполнении цилиндра согласнофиг,5 перемещение в крайнее левое положение при подаче давления в полость 4 и соединение полости 5 со сливом происходит вначале в результатесовместного перемещения поршня 2 ипоршня 12, При останове последнегов результате наезда на планку 13 движение поршня 2 влево продолжается подвоздействием на...
Пневматический дискретный сервомеханизм

Номер патента: 1551844
Опубликовано: 23.03.1990
Авторы: Акопджанян, Алейников, Алексеев, Волоцкой, Воробьев
МПК: F15B 11/12
Метки: дискретный, пневматический, сервомеханизм
...и маховик 5, становясьнакопителем кинетической энергии.Устойчивая работа сервомеханизмаобеспечивается схемой стабилизациичисла оборотов, Вследствие того, чтозаслонка 19 имеет равномерную перфо 55рацию, на выходе элемента 16 формируется равномерная последовательностьимпульсов, поступающая на дискриминатор 17, который формирует тактовую частоту и сигнал управления в виде релейного импульса неодинаковой продолжительно сти по ступающий в свою очередь на управляющий вход 18 пневмораспределителя 2При увеличении частоты вращения вала 4 выше тактовой частоты на вход 18 подается импульс определенной продолжительности, переключающий пневмораспределитель 2 в позицию, исключающую поступление рабочей среды в камеру 14. Вал 4 с...
Пневмогидросистема дискретного позиционирования

Номер патента: 1555546
Опубликовано: 07.04.1990
МПК: F15B 11/12
Метки: дискретного, пневмогидросистема, позиционирования
...10 с атмосферой. Поршень в разделителе 2 под действием давления воздуха начинает перемещаться по направлению к трубному участку, вытеснял из разделителя масло по трубному участку 6 в гидравли-.; ческий канал 7 рабочего преобразователя 1 и далее в поршневую полость гидроцилиндра 5. Поршень гидроцилинд ра перемещается - шток выдвигается.Перемещение поршня гидроцилиндра происходит до тех пор, пока поршень разделителя 2 не упрется уплотнением в трубный участок 6. Объем вытесненного масла иэ разделителя, соотнесенный с объемом поршневой полости определяет ход поршня гидроцилиндра на данном участке.1,с 102 где 1. - потребный ход гидроцилиндра(шаг 1);1, - ход поршня разделителя 2;Й - диаметр поршня раэделителя 2;0 - диаметр поршня...
Привод исполнительного механизма

Номер патента: 1571316
Опубликовано: 15.06.1990
Авторы: Войцещук, Костюченко, Никонов
МПК: B66F 1/08, F15B 11/12
Метки: исполнительного, механизма, привод
...до упора 14, а поршень 9 - до упора 15. При этом выступ 21 упора 14 отжимает заклинивающие элементы 12 муфты 10, а выступ 22 упора 15 - заклини-, вающие элементы 13 муфты 11. Шток остается неподвижным относительно корпуса 1, заклиненный элементами 23 и 24 муфт 21 и 22.Для,перемещения штока 1 вверх (по чертежу) на один шаг рабочая среда подается в полости 5 и 16 по канапу 27, а полость 4 сообщается с атмосферой. Поршень 18 перемещается доупора 15 и выступом 20 отжимает заклинивающие элементы 24 муфты 22,обеспечивая свободный ход штока 1в упоре 15 Одновременно посленекоторого перемещения поршня 8вверх по чертежу), выступ 21 упора14 освобождает элементы 12 и онизаклинивают шток 1 относительно муфты 10. При дальнейшем ходе поршня...
Способ позиционирования выходного звена гидродвигателя

Номер патента: 1576740
Опубликовано: 07.07.1990
Авторы: Богуславский, Воробьев, Герасимов, Сидоренко, Шуваев
МПК: F15B 11/12
Метки: выходного, гидродвигателя, звена, позиционирования
...1 гидродвигателя 2, равный Мс = Мн + Мт, при этом момент тормоза 4 равен нулю, так как при движении гидродвигателя 2 тормоз 4 выключен. В результате точка подачи команды на позиционирование сдвигается на величину Ь рн, компенсируя сокращение выбега при увеличении нагрузки М, Команда на позиционирование подается позже,При достижении углом поворота у 3(т) заданного значения (фиг,З),уЬ,л открывается щель 5 элемента 8 сравнения вращающегося гидрораспределителя 7, Срабатывает пороговый элемент 9 и подает давление управления Ру на тормоз 4, Тормоз 4, включаясь, увеличивает момент сопротивленияМ.- на выходном звене 1 гидродвигателя 2,Это увеличение передается через устройиство 2 компенсации изменения нагрузки навращающийся гидрораспределитель...