Система программного управления для пневмогидравлических приводов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1521937
Авторы: Бельферман, Браун, Затуловский, Черкашенко
Текст
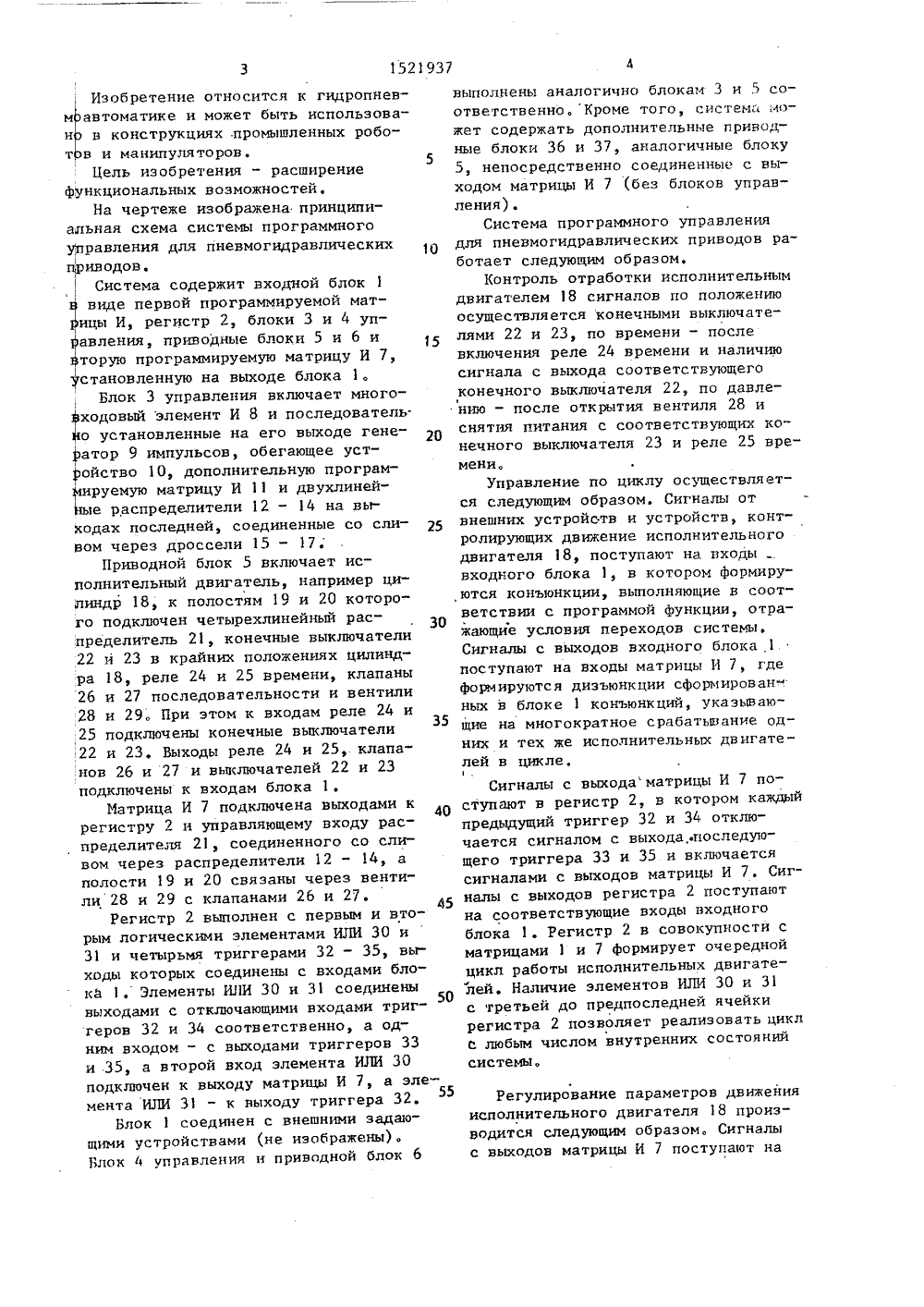
(54) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯДПЯ ПНЕВМОГИДРАВЛИЧЕСКИХ ПРИВОДОВ(57) Изобретение м,б. использованов конструкциях промышленных роботови манипуляторов. Цель изобретения -расширение функциональных возможностей системы программного управления, К полостям 19, 20 исполнительного двигателя подключен четырехлинейный распределитель (Р) 21, связанный с блоком (Б) 3 управления,Вто ьг=" ГОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИПРИ ГННТ СССР А ВТОРСНОМУ Сви(Э) Всесоюзный научиский и проектно-констститут промышленных ггидроавтоматики и Спеструкторское бюро агрков(56) Авторское свидетФ 1348569, кл. Р 15 В 2рая программируемая матрица (М) И 7 установлена на выходе входного Б 1, Каждый Б 3, 4 снабжен последовательно установленными на выходе многовходового элемента ИЛИ 30 (31) генератором 9 импульсов, обегаюшим устрвом 10, М 11 и двухлинейными Р 12, 13, 14 на выходах последней, Каждый приводной Б 5, 6 снабжен двумя вентилями 28, 29 и выполнен с двумя реле 24, 25 времени и двумя клапанами 26, 2 последовательности, Ко входам реле 24, 25 подключены концевые выключатели 22, 23, к входам Б 1 - выходы триггеров 32, 33, 34, 35 и выключателей 22, 23. М 7 подключена к регистру 2 и управляющему входу Р 21 соединенного со сливом через Р 12, 13, 14. Полости 19, 20 связаны через вентили 28, 29 с клапанами 26, 27, Регистр 2 выполнен с двумя логическими элементами ИЛИ 30, 31 и триггерами 32, 33, 34, 35. Управление Б 36, 37 осуществляется сигналами, поступающими на управляющие входы Р 21 от М 7, 1 з,п. Ф-лы, 1 ил.И зобретение относится к гидропневм автоматике и может быть использован в конструкциях промышленных робот, в и манипуляторов,5Цель изобретения - расширение функциональных возможностей.На чертеже изображена принципиальная схема системы программного управления для пневмогидравлических и,риводов.Система содержит входной блок 1виде первой программируемой матицы И, регистр 2, блоки 3 и 4 управления, приводные блоки 5 и 6 и вторую программируемую матрицу И 7, установленную на выходе блока 1.Блок 3 управления включает многоходовый элемент И 8 и последовательно установленные на его выходе генератор 9 импульсов, обегающее устройство 10, дополнительную программируемую матрицу И 11 и двухлинейЙые распределители 12 - 14 на вьг ходах последней, соединенные со сливом через дроссели 15 - 17.Приводной блок 5 включает исполнительный двигатель, например цилиндр 18, к полостям 19 и 20 которого подключен четырехлинейный распределитель 21, конечные выключатели 22 и 23 в крайних положениях цилиндра 18, реле 24 и 25 времени, клапаны 26 и 27 последовательности и вентили 28 и 29. При этом к входам реле 24 и 25 подключены конечные выключатели35 22 и 23. Выходы реле 24 и 25,.клапанов 26 и 27 и выключателей 22 и 23 подключены к входам блока 1.Матрица И 7 подключена выходами к регистру 2 и управляющему входу распределителя 21, соединенного со сливом через распределители 12 - 14, а полости 19 и 20 связаны через вентили 28 и 29 с клапанами 26 и 27.Регистр 2 выполнен с первым и вторым логическими элементами ИЛИ 30 и 31 и четырьмя триггерами 32 - 35, выходы которых соединены с входами блока 1. Элементы ИЛИ 30 и 31 соединены50 выходами с отключающими входами триггеров 32 и 34 соответственно, а одним входом - с выходами триггеров 33 и 35, а второй вход элемента ИЛИ 30 подключен к выходу матрицы И 7, а элемента ИЛИ 31 - к выходу триггера 32,55Блок 1 соединен с внешними задающими устройствами (не изображены). Блок 4 управления н приводной блок 6 выполнены аналогично блокам 3 и 5 соответственно.Кроме того, систем: может содержать дополнительные приводные блоки Зб и 37, аналогичные блоку5, непосредственно соединенные с выходом матрицы И 7 (без блоков управления),Система программного управлениядля пневмогидравлических приводов работает следующим образом,Контроль отработки исполнительнымдвигателем 18 сигналов по положениюосуществляется конечными выключателями 22 и 23, по времени - послевключения реле 24 времени и наличиюсигнала с выхода соответствующегоконечного выключателя 22, по давлению - после открытия вентиля 28 иснятия питания с соответствующих конечного выключателя 23 и реле 25 времени.Управление по циклу осуществляется следующим образом. Сигналы отвнешних устройств и устройств, контролирующих движение исполнительногодвигателя 18, поступают на входывходного блока 1, в котором формируются конъюнкции, выполняющие в соответствии с программой функции, отражающие условия переходов системы.Сигналы с выходов входного блока 1поступают на входы матрицы И 7, гдеформируются дизъюнкции сформирован.ных в блоке 1 конъюнкций, указывающие на многократное срабатывание одних и тех же исполнительных двигателей в цикле1Сигналы с выходаматрицы И 7 поступают в регистр 2, в котором каждыйпредыдущий триггер 32 и 34 отключается сигналом с выхода,.последующего триггера 33 и 35 н включаетсясигналами с выходов матрицы И 7. Сигналы с выходов регистра 2 поступаютна соответствующие входы входногоблока 1. Регистр 2 в совокупности сматрицами 1 и 7 формирует очереднойцикл работы исполнительных двигателей. Наличие элементов ИЛИ 30 и 31с третьей до предпоследней ячейкирегистра 2 позволяет реализовать циклС любым числом внутренних состоянийсистемы,Регулирование параметров движения исполнительного двигателя 18 производится следующим образом. Сигналы с выходов матрицы И 7 поступают на5 1521 вход элемента И 8 и далее на включение генератора 9 импульсов. Каждый импульс от генератора 9 переключает на такт обегающее устройство 10, вы- . ходные сигналы от которого поступают на входы матрицы И 11, В зависимости от программы последней переключаются клапаны 26 и 27, выходы которых соединены между собой, Если включены все клапаны 26 и 27, управляющиеся от одной матрицы И, то в этом случае исполнительный двигатель 18 перемещается с максимальной скоростью. Положение, в котором выключены распределители 12 - 14, соответствует отсутствию движения двигателя. Все возможные другие комбинации включений распределителей 12 - 14 в различные моменты времени регулируют закон движения исполнительного двигателя.Дроссели 15 - 17 установлены для получения различных значений эффективных площадей (число значений 2", и " число распределителей 12 - 14). Для удобства дроссели 15 - 17 подбираются таким образом, чтобы эффективная площадь линий, в которой установлен следующий по порядку дроссель была в 2 раза больше площади линии, в которой установлен предыдущий дроссель.Управление блоками 36 и 37 осуществляется сигналами, поступающими на управляющие входы распределите- лей аналогичных распределителю 21, от матрицы И 7. щему входу каждого четырехлинейного распределителя, соединенного со сливом через двухлинейные распределители, а каждая полость исполнительного 35двигателя связана через вентиль с од" ним из клапанов последовательности,2. Система по п.1, о т л и ч а ющ а я с я тем,что регистр выполнен с 1 по меньшей мере двумя логическими О элементами ИЛИ и четырьмя триггерами, причем каждый элемент ИЛИ соединен выходом с отключающим входом одного триггера, а одним входом - с выходом другого триггера, при этом второй вход первого элемента ИЛИ подклю- чен к выходу второй программируемой матрицы И, а второго - к выходу триггера, отключающий вход которого соединен с выходом первого элемента ИЛИ. Формула.изобретения Составитель С,РождественскийТехред М,Ходанич Корректор О, КРавцова Редактор И.Касарда Заказ 6928/32 Тираж 605 Подписное/ ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина,101 1. Система программного управления для пневмогидравлических приводов, содержащая входной блок в виде программируемой матрицы И, регистр с триггерами и логическими элементами, блоки управлениякаждый иэ ко,торых включает многовходовый элемент ИЛИ, а также приводные блоки, включа.ющие каждый исполнительньй двигатель,5 10 15 20 25 ЗО к полостям которого подключен четырехлинейный распределитель, связанньй с соответствующим блоком управления, конечные выключатели в крайних положениях исполнительного двигателя, реле времени и клапаны последовательности, о т л и ч а ю щ а яс я тем, что, с целью расширенияФункциональных возможностей, онаснабжена второи программируемой мат-,рицей И, установленной на выходе вход-.ного блока, каждый блок управленияснабжен последовательно установленными на выходе многовходового элемента ИЛИ генератором импульсов, обегающим устройством, дополнительной программируемой матрицей И и двухлинейными распределителями на выходах последней, а каждый приводной блокснабжен двумя вентилями и выполнен сдвумя реле времени и двумя клапанамипоследовательности, при этом к входам реле времени подключены конечныевыключатели, а к входам входного блока - выходы триггеров регистра и всехконечных выключателей, реле времении клапанов последовательности, вторая программируемая матрица И подключена выходами к регистру и управляю
СмотретьЗаявка
4339200, 07.12.1987
ВСЕСОЮЗНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ПРОЕКТНО КОНСТРУКТОРСКИЙ ИНСТИТУТ ПРОМЫШЛЕННЫХ ГИДРОПРИВОДОВ И ГИДРОАВТОМАТИКИ, СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКОЕ БЮРО АГРЕГАТНЫХ СТАНКОВ
ЧЕРКАШЕНКО МИХАИЛ ВЛАДИМИРОВИЧ, БЕЛЬФЕРМАН ВЛАДИМИР МИХАЙЛОВИЧ, ЗАТУЛОВСКИЙ МАКС ЕВСЕЕВИЧ, БРАУН МАРК НАУМОВИЧ
МПК / Метки
МПК: F15B 11/12
Метки: пневмогидравлических, приводов, программного
Опубликовано: 15.11.1989
Код ссылки
<a href="https://patents.su/3-1521937-sistema-programmnogo-upravleniya-dlya-pnevmogidravlicheskikh-privodov.html" target="_blank" rel="follow" title="База патентов СССР">Система программного управления для пневмогидравлических приводов</a>
Способ экспресс-диагностики выпрямительных элементов блоков питания

Номер патента: 1718159
Опубликовано: 07.03.1992
Авторы: Просянников, Сукиязов
МПК: G01R 31/28
Метки: блоков, выпрямительных, питания, экспресс-диагностики, элементов
...существенно упрощается процесс диагностирования выпрямительных полупроводниковых элементов блоков питания за счет исключения необходимости демонтажа защитных панелей блока, выпаивания или иного исключения проверяемых полупроводниковых элементов из общей схемы устройства, повышается надежность работы контролируемого выпрямительного блока питания за счет сокращения количества коммутационных элементов и операций диагностирования, а также исключения электрических связей, прокладываемых в блоках питания для подключения диагностических схем, повышается достоверность контроля качества выходного напряжения трансформаторновыпрямительного блока питания за счет раннего выявления неисправности в схеме выпрямления (обрыв плеча моста), появление...
Блок фазовых пороговых элементов

Номер патента: 930639
Опубликовано: 23.05.1982
Автор: Стокай
МПК: H03K 5/24
Метки: блок, пороговых, фазовых, элементов
...измерения фазового сдвига (1 негармоницеских сигналов достигается благодарятому, что путем подбора постоянногосмещения Ос 1 на вторых входах рабочего и опорных формирователей уменьшается погрешность преобразования фазового сдвига в эквивалентный временной интервал.Таким образом, введение в блок фазовых пороговых элементов источникаопорного напряжения постоянного токаи делителей напряжения, соединенныхсоответствующим образом, обеспечиваетповышение точности измерения фазового сдвига негармонических сигналов. Формула изобретения 3 9306зовращатели, элементы И и генераторопорного напряжения, выход которогоподключен к первому входу рабочегофазовращателя, вторым входом и выходом соединенного соответственно с шиной входных сигналов и первым...
Устройство для диагностирования взаимосвязанных электронных блоков и элементов блоков

Номер патента: 1441356
Опубликовано: 30.11.1988
Авторы: Зюбан, Парамонов, Трубицын
МПК: G05B 23/02
Метки: блоков, взаимосвязанных, диагностирования, электронных, элементов
...входывторого дешифратора 14, кроме того,1 через группу элементов ИЛИ-НЕ 16,116,2 на второй и третий входы элемента ИЛИ 17.С выходов 42-45 первого дешифратора 9 сигналы поступают на соответствующие индикаторы 10.1-10.4 блока 10индикаторов.С выходов 56-59 второго дешифрато"ра 14 сигналы поступают соответствен- ЗБно через первую и вторую группы клю"чей 18, 19 на соответствующие индика"торы 20.1-20,4 и 21.1-21.4 блоков 20и 21 индикаторов.С выхода элемента ИЛИ 17 сигналыпоступают на управляющие входы ключейпервой 18 и второй 19 группы, причемна управляющие входы первой группы18 непосредственно, а на управляющиевходы второй группы ключей 19 черезэлемент НЕ 22,Индикаторы включаются при поступлении на их входы сигналов "1"...
Блок инерциальных чувствительных элементов с избыточной структурой

Номер патента: 1810299
Опубликовано: 23.04.1993
МПК: G01C 21/00
Метки: блок, избыточной, инерциальных, структурой, чувствительных, элементов
...происходит при изменении углаа от 0 до 9,75, При угле а в диапазоне от9,75 до 19,5 получается симметричноерасположение только для другой оси октаэдрической тетрады и оси чувствительности,При использовании чувствительныхэлементов в прилежащих плоскостях октаэдрической тетрады (пересечение плоскости по оси октаэдрической тетрады),например, в соответствии с фиг.2 элементов2 и 5 в плоскостях Х 10 Хг и Х 10 Х 4, направляющий косинус между нормалью к плоскостиизмерения одним чувствительным элементом и ближайшей осью чувствительностидругого чувствительного элемента определяется по формуле.Спр, = сов 30соз аПри использовании чувствительныхэлементов в противолежащих плоскостях(плоскости измерения перпендикулярны между...
Опорные элементы блока тарелок массообменного аппарата

Номер патента: 1309998
Опубликовано: 15.05.1987
Авторы: Борисенко, Кравченко, Матюхин, Неретин, Цепанов, Чирикашвили
МПК: B01D 3/32
Метки: аппарата, блока, массообменного, опорные, тарелок, элементы
...фц 1. 3; ця фиг. 5 -- вид В ця фиг. 3; ца фиг. 6 последовагсльцость установки полурам тарелок.Оцорцые элемсцты 0;Ока тарелок фцг.и 2) сос 0 т цз оцорцых ш)лурами ., вкцочя 101 цРх уголки 3, 1 цвсллсры 4, юлуколь. цс 1 Э, Кропи)1 СИНЫ О. 10)1 КОЛ,1(с 5 ГярсГ)ОК (ООРс 1:1 Ь И СБЗРСЦЬ 1 СОБМССТНО С ЕРО 1 - итейцямц 6, образуя о Гчс. ц с узлы (фиг. 3), и имеют возможность персмсГцаться вдоль вертикальных полок уголков 3 и цвеллероц 4. Полурамыи 2 опорцых эгех(НтОБ сцзожсць 1 клиць 51.1 и ( и 8, Опорцые цовсрхцости 9 и 10 которых находятся в одной плоскости с опорной поверхностью 11 полуколец 5 ц опорцыми поверхцостямц 12 и 13 уголков 3 и ц)вслгеров соответственно.Техно ОгисескРй зазор 5 фиг. 4), Необходимый для непрерывного перемецеция...
Предыдущий патент: Шаговый гидропривод
Следующий патент: Гидроцилиндр одностороннего действия
Случайный патент: Шарнир рычажной подвески транспортного средства