Панякин
Авторулевой

Номер патента: 1527092
Опубликовано: 07.12.1989
Авторы: Мордовченко, Ожерельев, Панякин, Чихринов
МПК: B63H 25/04, G05D 1/02
Метки: авторулевой
...знак которого соответствует направлению гуоп равки ( например , - влево , " +" вп ра в о ) . Ус ил ц т ель -г р а ничи тель 9 и редна знач ен лля у с яд е ця ц о г р анич е 50 ния сигнала с выхина фа зочувствительного выпрямителя црц поправке больше +5 курса. Ограничение соответствует напряжению срабать азля логического устройства. В завцзцмостц от знака входного сигнал он проходит через55 диод 16 и цнвертр отр,нательных импульсов 17 на ц рвый вхи схемы ИЛИ 18 или чере л 1 л 19 ца второй вход 18. Сигнал с выхода логического устройства 1 О поступает на усилитель 11, служащий для усиления сигнала логического устройства 10 до величины срабатывания коммутационного устройства.Прц введении поправки к курсу больше 5 курса срабатывает...
Устройство автоматического управления курсом судна

Номер патента: 1237555
Опубликовано: 15.06.1986
Авторы: Знаменская, Мордовченко, Панякин
МПК: B63H 25/04
...1 гирокомпаса, механический дифференциал 2 со штурвалом и датчик 3 курса, выход которого подклк)чен к входам дифференцирующего блока 4 и интегрирующего блока 5. Выходы датчика 3, блоков 4 и 5 объединены и подклк)иены к следящему приводу 6 руля, содержащего последовательно соединенные усилитель 7 мощности, исполнительный механизм 8, рулеву 1 о машину 9. В цепь обратной связи следящего привода 6 включен датчик 10 положения руля, выход которого подключен к формирователю 11 скорости изменения угла перекладки руля. Формирователь1 содержит последовательно соединенные демодулятор 12 с фильтром, дифференцирующий усилитель 13 и модулятор 14. Выходы формирователя 11, которыми явля 1 отся выходы модулятора 14, объединены соответственно с...
Устройство для управления курсом судна

Номер патента: 1227546
Опубликовано: 30.04.1986
Авторы: Кузнецов, Мордовченко, Острецов, Панякин
МПК: B63H 25/04, G01D 1/02
...изобретения - повьппение экономичности управления. 5На фиг.1 приведена блок-схема. устройства, на фиг. 2 - блок-схема блока моделирования динамики движения судна; на фиг.З - принципиальная схема блока анализа динамики 10 движения судна.Устройство (фиг.1) содержит блсгк определения рассогласования по курсу, состоящий из задатчика 1 курса, датчика 2 курса и элемента 3 сравнения, датчик 4 угла перекладки руля и блок 5 определения производной курсаК выходам последних подключен блок 6 моделирования движения судна, первый и второй выходы которого под ключены к входам сумматора 7 и первому и второму входам блока 8-анализа динамики движения судна, третий вход которого соединен с третьим выходом блока 6. Четвертый выход блока 6 и выход сумматора...
Устройство для управления движением судна

Номер патента: 1150155
Опубликовано: 15.04.1985
Авторы: Авдонин, Кузнецов, Мордовченко, Острецов, Панякин
МПК: B63H 25/04
...и переменного смещения ра в зависимости от динамических свойств судна. Величина смешения индекса Чз на угол Ьр должна зависеть не только от угла перекладки руля, но и от угловой скорости циркуляции, причем зависимость от угла перекладки руля также должна подбираться исходя из динамических свойств судна.Есл иЧ=Члредск.где 2 Чпрея,ск. величина будущего углового поворота судна до момента выхода его на прямой курс без перегулирования, в момент времени при р равном требуемому, то следует прекратить режим маневра и включить режим автоматической стабилизации курса. Величина указанного поворота при фиксированном управлении в режиме стабилизации зависит от динамических характеристик судна, угловой скорости и положения руля:Л р= Г(р,...
Система управления курсом судна

Номер патента: 1131772
Опубликовано: 30.12.1984
Авторы: Мордовченко, Панякин, Склярова
МПК: B63H 25/04
...органов основной и дополнительной рулевых машин, а упомянутые рукоятки кинематически связаны через переключатель режимов управления с узлами управления по времени и роторами задатчиков отслеживания курса, обмотки которых последовательно соединены соответственно с обмотками основного и дополнительного датчиков курса, выходами основных и дополнительных дифференцирующих и . интегрирующих цепочек, обмотками основного 5 10 15 20 25 зо 35 40 45 50 55 и дополнительного датчиков обратной связи и входами основного и дополнительного усилителей мощности, причем основной и дополнительный исполнительные механизмы соединены электрическими цепями с узлами управления по времени через переключатель режимов.На чертеже представлена функциональная схема...
Система управления электрогидравлической рулевой машиной

Номер патента: 1113307
Опубликовано: 15.09.1984
Авторы: Авдонин, Мордовченко, Панякин
МПК: B63H 25/04
Метки: машиной, рулевой, электрогидравлической
...питания в системе управления.На чертеже представлена функциональая схема системы,Система управления электрогидравлической рулевой машиной содержит формирователь(включает в себя датчик курса,дифференцирующее и интегрирующее устройства), подключенный к входу предварительного каскада 2 усиления сигнала, выходкоторого электрически соединен с входом де 50 55 отклонения судна от курса, При нормально замкнутых контактах реле 6 и 7 сигнал беспрепятственно проходит на оконечный каскад 8 усиления, который приводит во вращение электродвигатель 9, смещающий из нулевого положения управляющий орган насоса 10. Рулевая машина 11 будет перекладывать в определенном направлении баллер 12 руля, датчик обратной связи 3 и кулачково-контактное устройство,4....
Стенд для регулировки и испытаний системы управления курсом судна
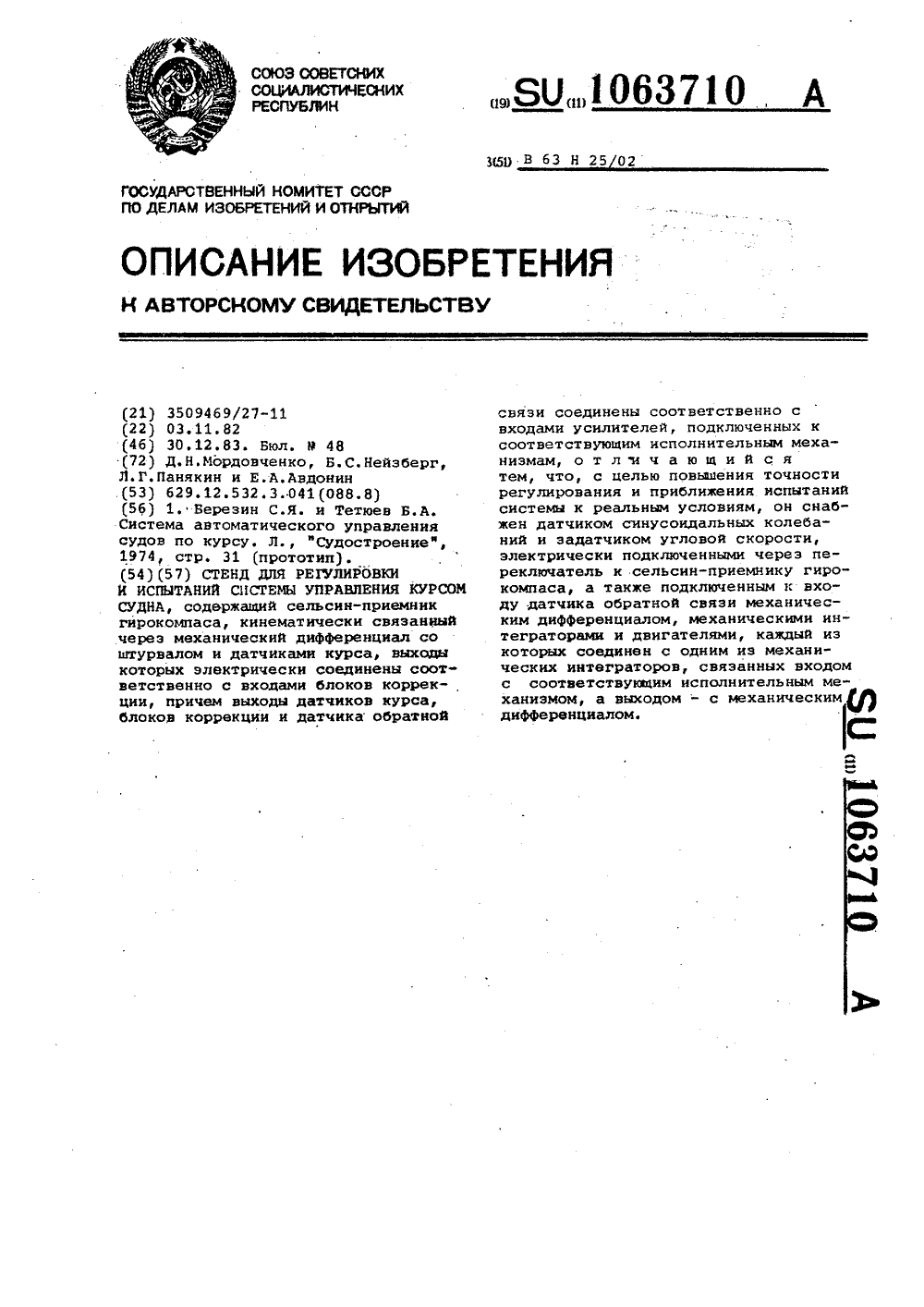
Номер патента: 1063710
Опубликовано: 30.12.1983
Авторы: Авдонин, Мордовченко, Нейзберг, Панякин
МПК: B63H 25/02
Метки: испытаний, курсом, регулировки, системы, стенд, судна
...курса, блдков коррекции и датчика обратной связи соединены со ответственно с входами усилителей, подключенных к соответствующим исполнительным механизмам, снабжен датчиком синусоидальных колебаний и задатчиком угловой скорости, электрически подключенными через переключатель к сельсин-приемнику гирокомпаса, а также подключенным к входу датчика обратной связи механическим дифференциалом, механическими интеграторами и двигателями, каждый из которых соединен с одним из механических интеграторов, связанных входом с соответствующим исполнительным механизмом,а выходом - с механическим дифференциалом, ОНа чертеже представлена Функциональная схема стенда.Датчик,.1 синусоидальных колебаний и датчик 2 заданной угловой скорости через...
Система стабилизации судна по курсу и бортовой качке

Номер патента: 1030260
Опубликовано: 23.07.1983
Авторы: Авдонин, Знаменская, Мордовченко, Панякин, Склярова
МПК: B63H 25/04
Метки: бортовой, качке, курсу, стабилизации, судна
...демодулятора с Фильтроми вторым входом суммирующего усилителя, при этом выход интегрирующегоустройства соединен с выходом датчика 45обратной связи.На чертеже представлена функциональная схема предлагаемой системы стабилизации судна по курсу и бортовой качке.3Система содержит авторулевой 1, состоящий из сельсина-приемника 2 курса, подключенного к гидрокомбасу, механического дифференциала 3, датчика 4 управляющего сигнала, дифференцирующего 5 и интегрирующего б устройств, усилителя 7 мощности, исполнительного механизма 8, рулевой машины 9, датчика 10 обратной связидатчика 11 бортовой качки, выход которого соединен с входом демодулятора 12 с фильтром. Выход демодулятора 12 с фильтром соединен с входами дифференцирующего 13 и...
Устройство для управления силовыми приводами двух электрогидравлических рулевых машин

Номер патента: 1022870
Опубликовано: 15.06.1983
Авторы: Мордовченко, Нейзберг, Пайко, Панякин
МПК: B63H 25/24
Метки: двух, машин, приводами, рулевых, силовыми, электрогидравлических
...имеющим на конце фланец с эксцентричным пальцем, входящим в прорезь каретки, расположенной на валу, связанном с первой из указанных рукояток, и стержнем с расположенной на нем пружиной, кинематически связанный с второй рукояткой, причем конец стержня расположен в прорези, выполненной на фланце вала, связанного с первой рукояткойНа чертеже представлена кинематическая схема устройства,Устройство состоит из задатчиков 1 следящих систем, кинематически связанных с нуль-установителями 2, кинематически связанных через узел 3 управления с рукоятками 4 и 5. Рукоятка переключателя 6 жестко связана с дополнительным валом 7, на конце которого расположен фланец с эксцентричным пальцем, который входит в прорезь каретки 8. Рукоятка 4 кинематически...
Судовой авторулевой

Номер патента: 1017594
Опубликовано: 15.05.1983
Авторы: Мордовченко, Панякин
МПК: B63H 25/04
Метки: авторулевой, судовой
...режимов управления подключен кследящей системе управления рулем.На чертеже представлена функциональная схема авторулевого.Он содержит демодулятор 1 с филыром, последовательно соединенный с усилителем 2 с автоматической регулировкойусиления, причем вход демодулятора 1 сфильтром соединен с выходом усилителя,.следящей системы гирокомпаса, а выход Усилителя 2 с автоматической регулировкой усиления - с входом интегрирующего устройства 3, на вход которого55подключен задатчик 4 угловой скорости,Выходы усилителя 2 и устройства 3 соедйнены с первым и вторым входами усилителя 5 с зоной нечувствительности. Выход усилителя 5 интегрдтора 6 подклю. чены к первому н второму входам сумматора 7, выход которого через переключатель 8 режимов управления...
Система управления рулевой машиной

Номер патента: 818961
Опубликовано: 07.04.1981
Авторы: Мордовченко, Нейзберг, Пайко, Панякин
МПК: B63H 25/04
...частота импульсов задается генератором импульсов 12. Переключатель вида выходного напряжения 6 управляет порядком работы тиристоров преобразователя выходного напряжения 7. Исполнительное устройство 8 управляет работой рулевой машины 9, механически связанной с баллером руля 10 и датчиком обратной связи 11.Работа системы управления рулевой машиной осуществляется следующим образом.При изменении курса судна формирователь закона управления 1 вырабатывает сигнал, пропорциональный углу скорости (производной) и интегралу угла отклонения судна от заданного курса, который через сумматор 2 поступает на усилитель-ограничитель 3 и после усиления и ограничения по амплитуде выпрямляется фазочувствительным усилителем 4 в напряжение определенной...
Авторулевой

Номер патента: 726500
Опубликовано: 05.04.1980
Авторы: Мордовченко, Пайко, Панякин
МПК: G05D 1/00
Метки: авторулевой
...д113033, МоеФилиал ППП Государственногоелам изобретенийква, Ж - 35, РауПатентэ, г. Ужгор комитета и открыт шская наб од, ул, П д 4/5роектная,3адаптации 12, который вырабатывает сигна лы, пропорциональные скорости изменениякурсаиинтегралу от углов рыскания судна на заданном курсе. На другие входы блока адаптации 12 поступают сигналы о 4 датчиков положения 9, обратной связи руля 8, скорости хода 10, глубины 11, с выхода усилителя 5.При изменении скорости хода или глуби 1 ь 1,-а"также одновременно скорости хода и глубины автоматически изменяются коэффипиенты передачи сигналов от курса, ско рости изменения курса и обратной связи руля, а при увеличении рыскания судна, при ухудшении состояния мря, сигнал с выхода усилителя 5 поступает на...
Стенд для испытаний системы управ-ления судном по курсу на волнении
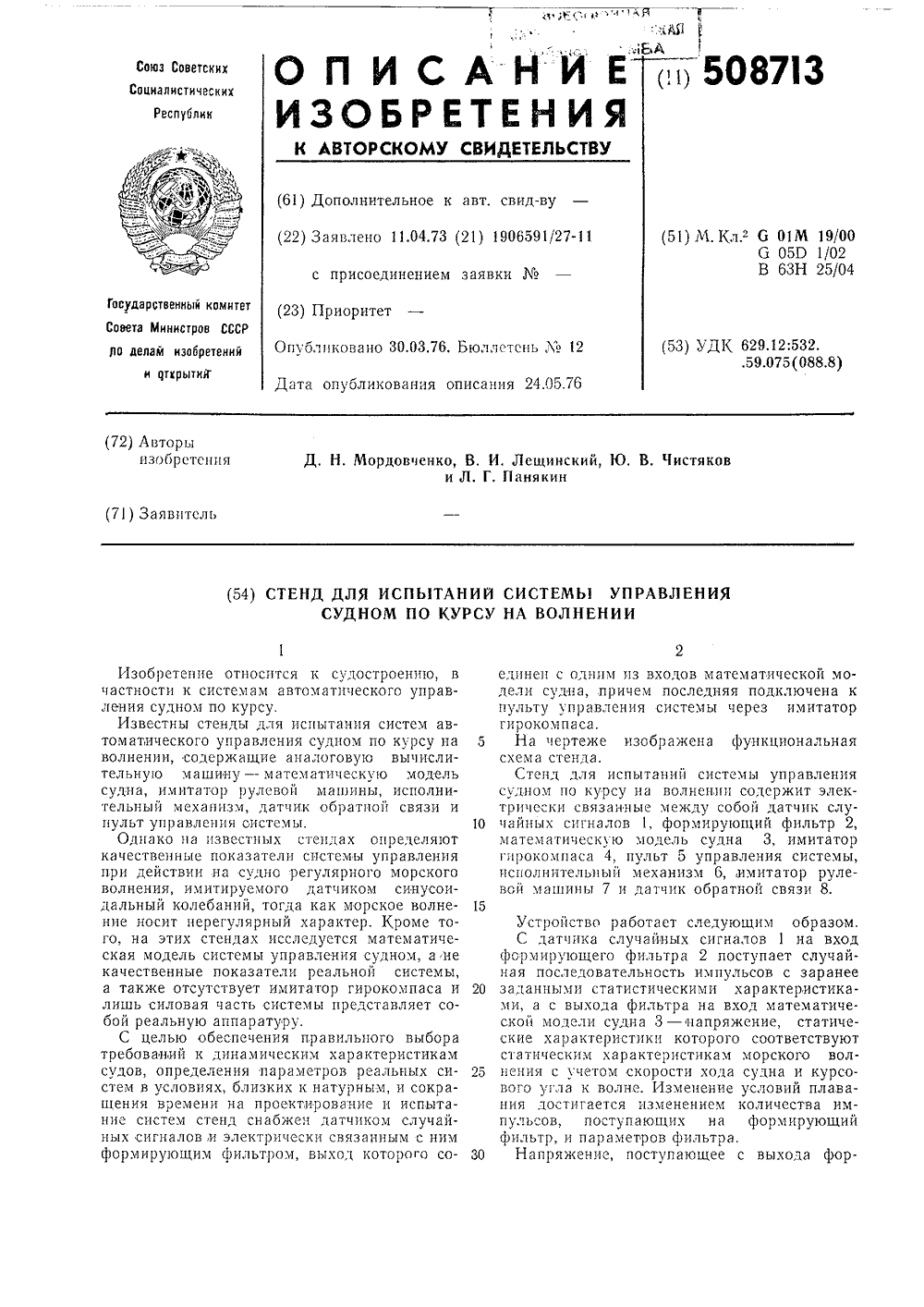
Номер патента: 508713
Опубликовано: 30.03.1976
Авторы: Лещинский, Мордовченко, Панякин, Чистяков
МПК: G01M 19/00
Метки: волнении, испытаний, курсу, системы, стенд, судном, управ-ления
...и сокращения времени на проектирование и испытание систем стенд снабжен датчиком случайных сигналов,и электрически связанным с ним фОРМИРУОЩИМ ФИЛЬТРОМ, ВЫХОД КОТОРОго СОединен с одним пз входов математическон модели судна, причем последняя подключена к пульту управления системы через имитатор гирокомпаса.На чертеже изображена функциональная схема стенда,Стенд для испытаний системы управления судном по курсу на волнении содержит электрически связанные между собой датчик случайных сигналов 1, формирующий фильтр 2, математическую ходель судна 3, имитатор гирокомпаса 4, пульт 5 управления системы, исполнительныц механизм бимитатор рулевой машинь 7 и датчик обратной связи 8.Ф ф,:508713 Формула изобретения Составитель В. Алексеев...
Система управления электрогидравлической рулевой машиной

Номер патента: 483305
Опубликовано: 05.09.1975
Авторы: Мордовченко, Панякин, Смирнов, Чистяков
МПК: B63H 25/04
Метки: машиной, рулевой, электрогидравлической
...контакты которого электрически соединены с блоком 15 питания и обмотками реле.Действие системы управления осуществляется следующим образом.Формирователь 1 закона управления вырабатывает сигнал, пропорциональный углу отклонения судна от курса, производной и интегралу от угла отклонения, который усиливается предварительным каскадом 2 усиления. Демодулятор-модулятор 3 преобразовывает сигнал определенной фазы в сигнал определенной полярности в зависимости от направления отклонения судна от курса. При нормально замкнутых контактах реле 6 и 7 сигнал беспрепятственно проходит на оконечный каскад 8 усиления, который приводит во вращение электродвигатель 9, смещающий из нулевого положения управляющий орган 10 насосного агрегата и нулевой...