Патенты с меткой «курсу»
Аппарат для автоматического ведения судна по заданному курсу

Номер патента: 991
Опубликовано: 15.09.1924
Автор: Мускар
МПК: B63H 25/04
Метки: аппарат, ведения, заданному, курсу, судна
...металлического стержня 124 - 125 с изолированными друг от друга металлическимирейками 752 в 753.При нерабочем положении пластинка, 729, находясь между рейками 752 в 7,не касается ни одной из них, - она изо-, лирована от угольника 154.Шайба 72 б не имеет винтовой на-резки и передвигается по бесконечномувинту посредством сидящего на винто. ( вой нарезке угольника 754, При пере-движении влево, она делает контакт 755, при передвижении вправо - 15 б, при- нерабочем положении контакта шайбы, 12 б с угольником 154 не имеется; 157 " и 158 - изоляторы.Рейки 134 в 143 и 152, 153 и ихизоляции, а также два штифта 14 б переключателей 144, 145 при передви-женки рамы 159 - 1 б 2 посредством винта 1 бЗ могут быть передвигаемы вправо и влево по...
Прибор для демонстрации оптических ощущений и восприятий по курсу психологии

Номер патента: 90441
Опубликовано: 01.01.1950
Автор: Мильерьян
МПК: G09B 23/28
Метки: восприятий, демонстрации, курсу, оптических, ощущений, прибор, психологии
...яз.11 ка 12,Пусковой мсх 2 еизм предназначен дл 51 тср.,Ожсни 51 и пускЯ В ходГГ 12 ВПОГО ВЯ;2. Гри Вр ЯщС:ИН рук 051 кс 1 ВЯГ Я с С Оар 20 сп Ох Пс сЯСОЗОЙсгрслкс фиГурЯя планка сВОихи сксшснньм краями сВОООДО подни-.;ает ЯЗЫсСК, которыЙ ПРИ ВРЯЩСНИИ ПРОТИВ ЧЯСОВОЙ СТРСЛКИ стопсритОяр асан. При няжимс на кнопку с 6 Г 15 рял 1 Н 251 прукипя 1 лс сжимается,П-Образная скоба псЙД(т Вниз и пластп:сЯ 125 пгужина 18 нажмет свс;лъконцоз на заострснньпл кояй язьчка, которып ПОВсрется Вокруг своейоси и этим освободит барабан, который под дсйствлсм груза начнетвращаться против 1 ЯсОВОЙ стрслкп. При продолтксппи нажима на кнопкуП,аСТИНсЯТ 251 ПРУЖ:Па СОСКОЛЬЗНСТ С ЗЯОСТРСНПОГС КСПЦЯ ЯЗЬП(2, И ОнНСД ДСИСТВИСМ СПсРЯЛЬНСИ ПРУЖИНЫ ВОЗВРЯТИТСЯ...
Система стабилизации скоростных судов по курсу

Номер патента: 495235
Опубликовано: 15.12.1975
Автор: Руденко
МПК: B63H 25/46
Метки: курсу, скоростных, стабилизации, судов
...1 изображено в плане расположе 15 ние двигателей скоростного судна; на фиг. 2 -функциональная схема описываемой системы.Двигатели 1, и 12, например турбореактивные, расположены на аэродинамических килях2, и 22, симметрично ДП скоростного судна 30 и снабжены штатными станциями управления4, и 42, обобщенными реле остановки 5, и 5 е,стоп-кранами 61 и 62 и кабельными линиямисвязи 7, и 7 причем в состав станций управления 4 и 42 входят датчики, обеспечиваю 25 щие защиту двигателя по различным параметрам, и соединенные с обобщенными релеостановки 5, и 5,.Комплект указанных датчиков,новки и стоп-кран составляет систе30 ной остановки двигателя.Кабельные линии связи 8, и 8 соединяют свободные контакты реле 5 и 5 соответственно со стоп-кранами...
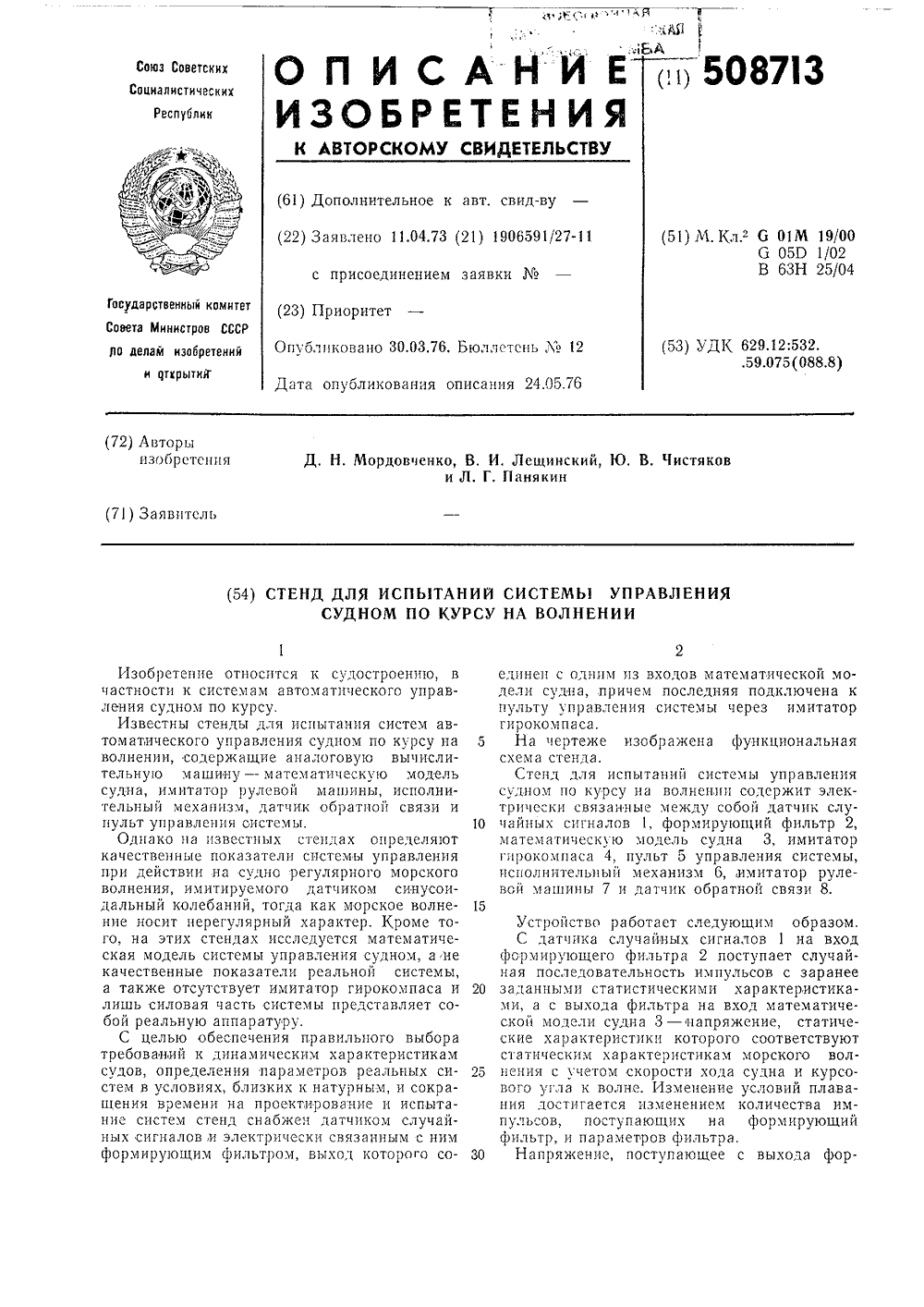
Стенд для испытаний системы управ-ления судном по курсу на волнении
Номер патента: 508713
Опубликовано: 30.03.1976
Авторы: Лещинский, Мордовченко, Панякин, Чистяков
МПК: G01M 19/00
Метки: волнении, испытаний, курсу, системы, стенд, судном, управ-ления
...и сокращения времени на проектирование и испытание систем стенд снабжен датчиком случайных сигналов,и электрически связанным с ним фОРМИРУОЩИМ ФИЛЬТРОМ, ВЫХОД КОТОРОго СОединен с одним пз входов математическон модели судна, причем последняя подключена к пульту управления системы через имитатор гирокомпаса.На чертеже изображена функциональная схема стенда,Стенд для испытаний системы управления судном по курсу на волнении содержит электрически связанные между собой датчик случайных сигналов 1, формирующий фильтр 2, математическую ходель судна 3, имитатор гирокомпаса 4, пульт 5 управления системы, исполнительныц механизм бимитатор рулевой машинь 7 и датчик обратной связи 8.Ф ф,:508713 Формула изобретения Составитель В. Алексеев...
Движитель стабилизированного по курсу самоходного транспортного средства

Номер патента: 608459
Опубликовано: 25.05.1978
Автор: Бенгт
МПК: B60B 19/00
Метки: движитель, курсу, самоходного, средства, стабилизированного, транспортного
...в себя корпус 3 с подшипником,установленным на оси 2. На наружнойцилиндрической поверхности центральной части выполнено зигзагообразноеоснование 4, к которому крепятся кронштейны 5 роликов. Ролики имеют бочкообразную Форму и выполнены из двухчастей 6.1 и 6,2. Каждый ролик установлен на оси 7, связанной с кронштейном 5 через подшипники 8 и их корпус 9. Части роликов 6,1 и 6.3 выполнены с осевыми выемками 10. Эластичныеэлементы роликов напрессованы на втулке 11, посредством которых они устанавливаются на оси 7 и фиксируются на нейс помощью шайб 12 и болтов 13.Для движения транспортного средства в любом желаемом направлении движители устанавливаются на осях транспортного средства с воэможностью их независимого вращения относительно...
Устройство для стабилизации движения быстроходного судна по курсу

Номер патента: 643382
Опубликовано: 25.01.1979
Автор: Руденко
МПК: B60V 1/11
Метки: быстроходного, движения, курсу, стабилизации, судна
...судно с предлагаемым устройством, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение АА на фиг. 1; на фиг. 4 - функциональная схема действия предлагаемого устройства.Устройство для стабилизации движения быстроходного судна по курсу снабжено датчиком 1 давления воздуха, установленным у входного воздушного тракта о,газовой турбины 2 двигателя 3 и реагирующим на разрежение воздуха в этом тракте.Датчик 1 при помощи электрокабелей4 и 5 связан соответственно с исполнительным и питательным органами системы 6 аварийной остановки двигателя 3.Устройство работает следукпцим образом,, Нормальная работа турбины 2 без помпажа характеризуется определенным интервалом показаний датчика 1В случае превышения разрежения в тракте а, которое...
Система уменьшения бортовой качки и рыскания по курсу судна

Номер патента: 903813
Опубликовано: 07.02.1982
Автор: Добровольский
МПК: G05D 1/08
Метки: бортовой, качки, курсу, рыскания, судна, уменьшения
...и блок выделения мо дуля, входами подключенные к выходу датчика угла крена, а выходами ко входам третьего сумматора, выход порогового элемента связан сб вторым входом ключа, выходом подключенного 1 З к третьему входу первого сумматора, причем выходы датчиков угла и угловой скорости крена связаны со входами второго сумматора.На чертеже изображена блок-схема 20 предлагаемой системы.Система содержит датчики 1 угла в угловой скорости рыскания (обьединены), датчик 2 угла крена, датчик 3 угловой скорости крена, первый сумматор 4, авторулевой 5 и исполнительный 6 механизмы, рулевая машина 7, блок 0 обратной связи, второй 9 и третий 10 сумматоры, ключ 11, инвертор 12, блок 13 выделения модуля, Зо усреднитель 14 и пороговый элемент 15.Система...
Система стабилизации судна по курсу и бортовой качке

Номер патента: 1030260
Опубликовано: 23.07.1983
Авторы: Авдонин, Знаменская, Мордовченко, Панякин, Склярова
МПК: B63H 25/04
Метки: бортовой, качке, курсу, стабилизации, судна
...демодулятора с Фильтроми вторым входом суммирующего усилителя, при этом выход интегрирующегоустройства соединен с выходом датчика 45обратной связи.На чертеже представлена функциональная схема предлагаемой системы стабилизации судна по курсу и бортовой качке.3Система содержит авторулевой 1, состоящий из сельсина-приемника 2 курса, подключенного к гидрокомбасу, механического дифференциала 3, датчика 4 управляющего сигнала, дифференцирующего 5 и интегрирующего б устройств, усилителя 7 мощности, исполнительного механизма 8, рулевой машины 9, датчика 10 обратной связидатчика 11 бортовой качки, выход которого соединен с входом демодулятора 12 с фильтром. Выход демодулятора 12 с фильтром соединен с входами дифференцирующего 13 и...
Стенд для испытаний системы управления судном по курсу на волнении

Номер патента: 1050967
Опубликовано: 30.10.1983
Автор: Мордовченко
МПК: B63H 25/04
Метки: волнении, испытаний, курсу, системы, стенд, судном
...сигналов, формирую.щнй фильтр 2 (двойной Т-образный фильтр,выполненный на резисторах н конденсаторах), математическую модель 3 судна (дифференциальные уравнения движения суд-на, набранные на аналого-вычислительноймашине), имитатор 4 гндрокомпаса, пульт5 снствмы управления (в нем находятся сельснн-приемннк гирокомпаса, кинематически связанный с датчиками курса, днфференцнрующне н ннтегрирующне устройства, выключателя питания насосов рулевой машины н индикаторы курса н руля), исполнительный механизм 6, имитатор 7 рулевоймашины и датчик 8 обратной связи.Кроме того, в схему стенда включеныблоки 9 н О выделения модуля (эмиттерные повторители, выходы которых подключены к однойолупериодным выпрямнтеляМс КС-фнльтрамн), электрически...
Устройство для автоматического управления движением проходческого комбайна по заданному курсу

Номер патента: 1317122
Опубликовано: 15.06.1987
Авторы: Волков, Муравьев, Назаров, Шехтман
МПК: E21C 35/24
Метки: движением, заданному, комбайна, курсу, проходческого
...длине выработки можно представить как произведение вида(2) 35 где о - коэффициент пропускания оптического излучения на участке от эадатчика направления до рабочей зоны комбайна 1л4 О- коэффициент прапускания аптическаго излучения в рабочей зоне комбайна.л ОБЦтогдаф При вынесении Фотоприемного блока 2, установленного на аэимутальностабилиэированной платформе, иэ зоны работы комбайна ксзффициент пропус- О кания оптического излучения увеличится в К раэ6 Е = ЬУ - 1 Х.Знаки смещений Х и У в приведенном выражении определяются их направлением относительно оптической аси эаИз Фотометрии известно, что при 55 равенстве освещенностей какого-либоучастка, создаваемых двумя источниками излучения, находяшимися на расстоянии 2, и 1 соответственно...
Система управления движением по курсу двухгусеничной машины

Номер патента: 1379145
Опубликовано: 07.03.1988
Авторы: Бирюков, Дерюженко, Ерошенков, Жегалов, Колмогорцев, Кугель, Щербаков
МПК: B60K 17/10
Метки: движением, двухгусеничной, курсу
...управления работает следующим образом.Поступательная скорость машины 20 задается перемещением тяги 13, соелинснной с ручкой 12 управления в кабине оператора. При движении по прямой золотники гидрораспределителей 4 и 15 находятся в нейтральных позиция. При этом лавление рабочей жидкости в управляюгцих полостях гидроцилинлров 5 и 6 отсутстует и напорные и сливные магистрали левого 17 и правого 16 гидромоторов соответстенно соединены между собой, тем самым между гилромоторами осуществляется гидравлическая связь, а лва гилронасоса солицецы параллельно.При отклонении машины от курса, заданного тросовым копиром 1 (как при изменении направления самого тросового копира), датчик 2 курса формирует сигнал отклонения и передает его на блок 3...
Устройство автоматического управления движением землеройно транспортной машины по заданному курсу

Номер патента: 1550053
Опубликовано: 15.03.1990
Авторы: Дерюженко, Зимин, Щербаков
МПК: E02F 9/20
Метки: движением, заданному, землеройно, курсу, транспортной
...50 55 515своей контактной поверхностью 17под действием пружин 25 и 26 и ориентируется своей осью по курсу движения, При перемещении рабочего ортана24 в горизонтальной плоскости в допустимых прег лах относительно копирных вешек 15 золотники датчиков8 и 11 находятся в нейтральном положении, а сигнал управления делителем,2 потока, отсутствует. Рабочая жидкость от насосной станции 1 двумя потоками с равными расходами поступаетв гидромоторы 3 и 4 привода правойи левой гусеничных тележек, которыевращаются с одинаковой угловой скоростью,При появлении под действием возмущающих факторов линейного и угдового отклонений рабочего органа вгоризонтальной плоскости от заданного курса тяги 21 и 22 смещаются впоперечной плоскости под воздействием пружины...
Способ автоматической выставки по курсу инерциальной навигационной системы и устройство для его осуществления

Номер патента: 1835489
Опубликовано: 23.08.1993
Авторы: Болотов, Гайшун, Меркулов
МПК: G01C 21/18
Метки: автоматической, выставки, инерциальной, курсу, навигационной, системы
...суммирующих устройств сигнал поступает на входы соответственно первого 11 и второго 12 двигателей отработки, Двигатели отработки вызывают разворот соответственно первой 1 и второй 2 гироплатформ в азимуте, что приводит к появлению сигналов на выходах соответственно первого 22 и второго 23 датчиков положения, Сигналы обратной связи с выходОв первого 22 и второго 23 датчиков положения поступают на первые входы соответственно первого 19 и втОрого 20 суммирующих устройств. По окончании отработки сигнала с индукционного датчика 17 оси гироплатформ образуют с направлением на Север одинаковый угол, определяемый точностью датчика магнитного курса 17.После выставки осей гироплатформ в направлении на Север по сигналу с магнитного курса 17 с...