Цифровой регулятор перемещения длинномерного материала в рабочую зону обрабатывающей машины
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
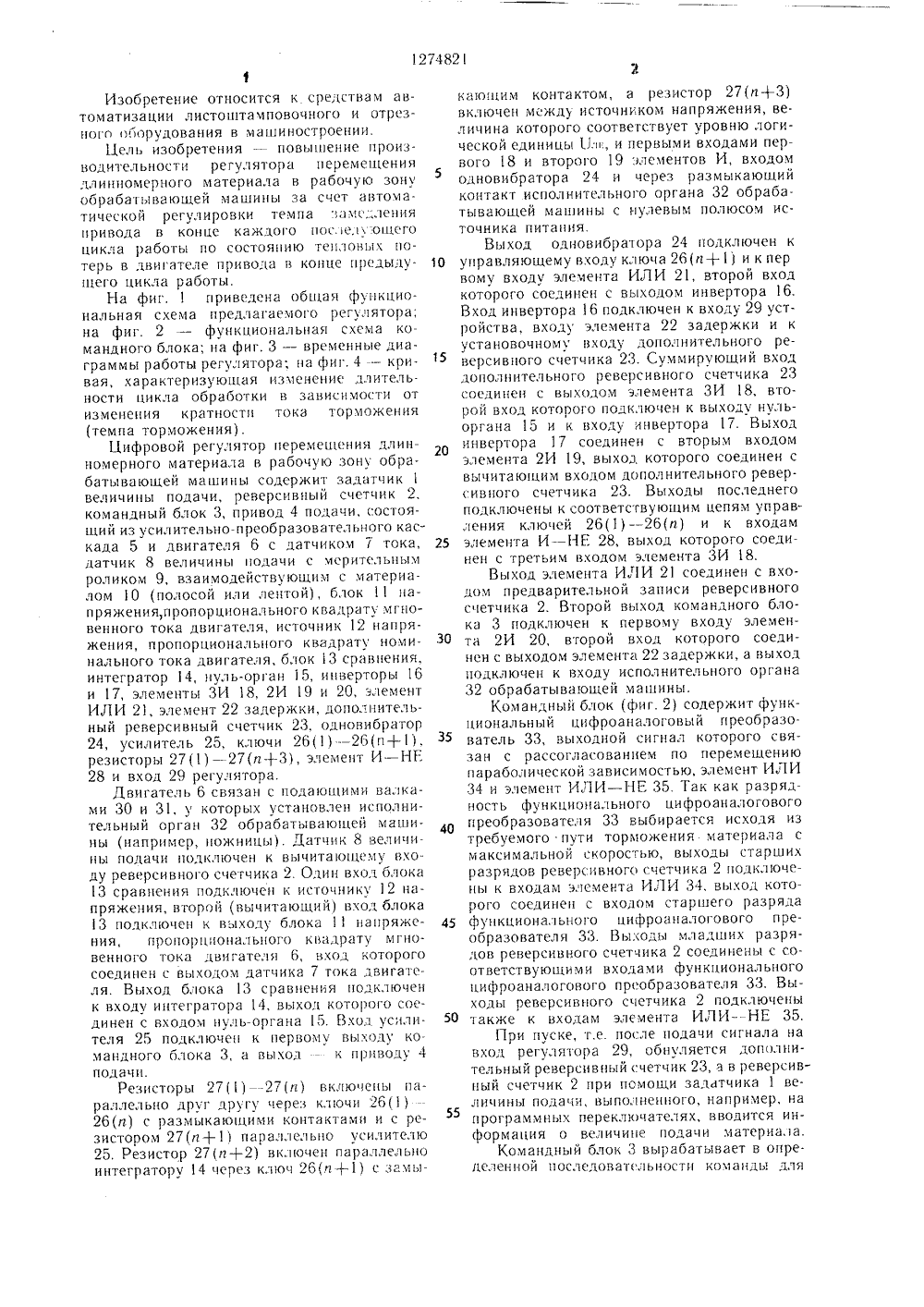
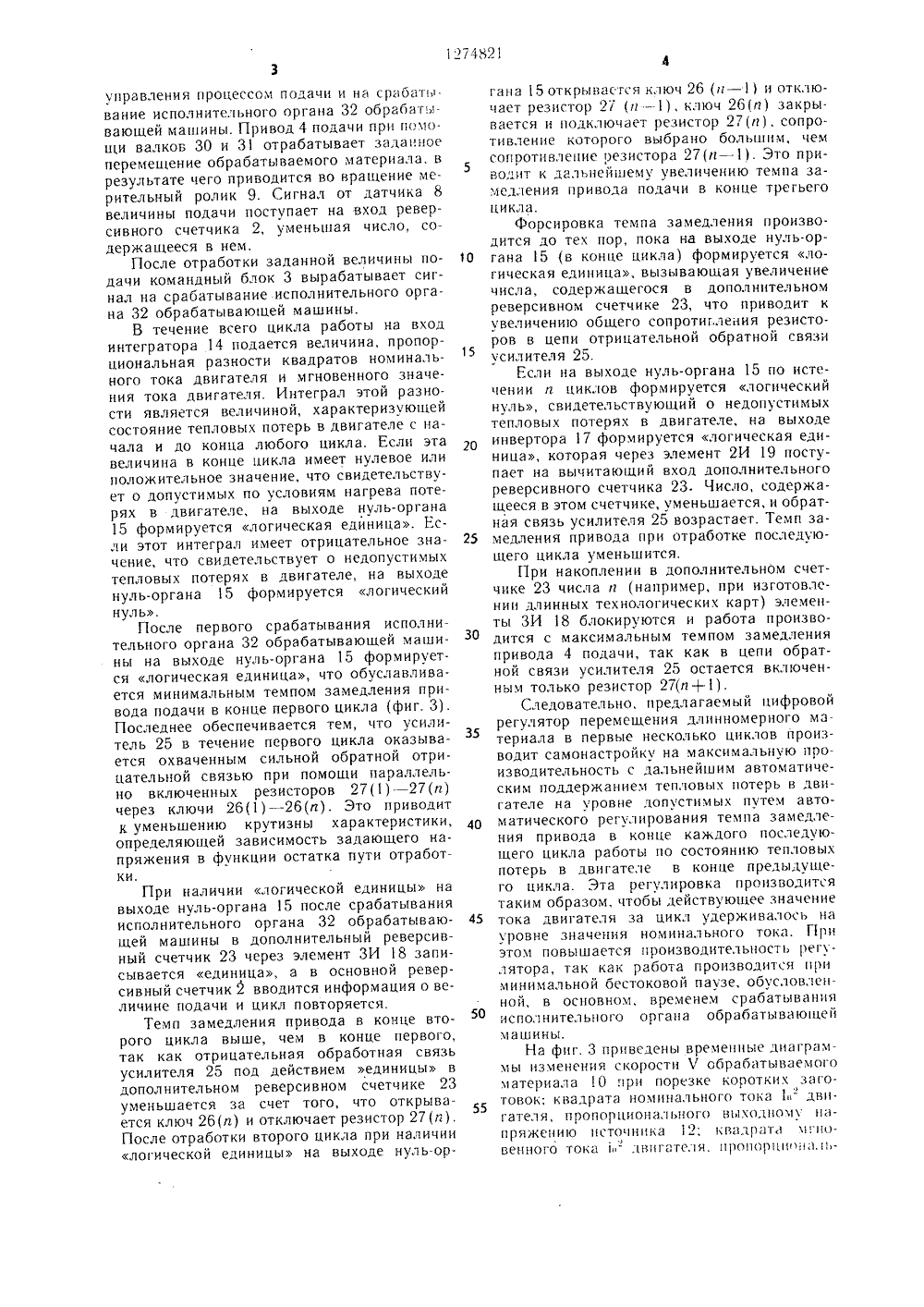
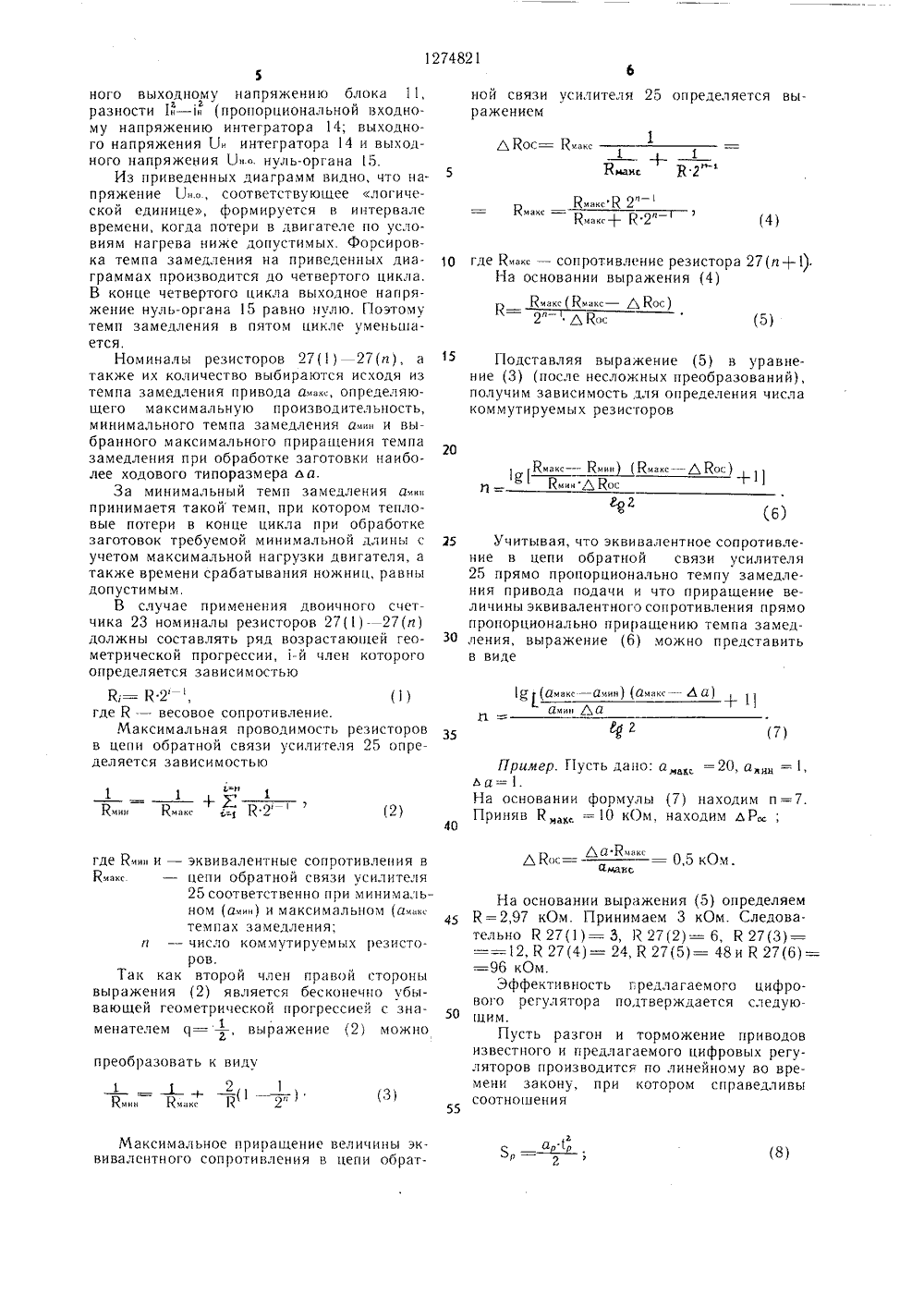
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХ 1274821 СПУБЛИК 19) ПИСАНИЕ ИЗОБРЕТЕНИ У СВИДЕТЕЛЬСТВУ ВТОРС ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИ(71) Научно-исследовательский институт автоматизации управления и производства (72) И. П. Капустник, В. Ф. Кокорев, А. И. Павлов и С. В. Суярко(56) Срибнер Л. А., Шраго Л. К. Проектирование позиционных систем программного управления, - М.: Машгиз 1962, с. 8 - 11.Авторское свидетельство СССР904841, кл, В 21 Р 43/00, 1980.Авторское свидетельство СССР1092482, кл. 6 05 В 19/00, 1984.(54) ЦИФРОВОЙ РЕГУЛЯТОР ПЕРЕМЕЩЕНИЯ ДЛИННОМЕРНОГО МАТЕРИАЛА В РАБОЧУЮ ЗОНУ ОБРАБАТЫВАЮЩЕЙ МАШИНЫ57) Цифровой регулятор перемещения материала относится к средствам автоматизации листоштамповочного и отрезного оборудования в машиностроении. Изобретение позволяет повысить производительность оборудования за счет автоматической регулировки темпа замедления привода подачи материала в конце каждого цикла работы 4 В 21 Р 43/00, б 05 В 19/00 по состоянию тепловых потерь в двигателе привода в предыдущем цикле работы. Такой режим работы обеспечивается цифровым регулятором, содержащим задатчик величины подачи материала, командный блок, привод подачи с датчиком тока, датчик величины подачи материала, два источника напряжения и блок сравнения, обеспечивающие контроль эффективного значения тока двигателя, интегратор, усилитель с управляемой величиной коэффициента обратной связи, нуль-орган, основной и дополнительный реверсивные счетчики и логические элементы для связи этих узлов регулятора. Изменение темпа замедления от цикла к циклу обусловливается изменением коэффициента отрицательной обратной связи усилителя через управляемые дополнительным реверсивным счетчиком ключи по результатам оценки интегратором и нуль-органом тепловых потерь в двигателе за весь предыдуьций любой цикл подачи и обработки материала. 1 риведена зависимость длительности цикла и кратности тока торможения, полученная в обрабатывающей машине с использованием цифрового регулятора. 4 ил.1Изобретение относится к средствам автоматизации листоштамповочного и отрезного оборудования в машиностроении.Цель изобретения - повышение производительности регулятора перемещения ллинномерного материала в рабочую зону обрабатьваюшей машины за счет автоматической регулировки темпа заме;ления привода в конце каждого последу юшего цикла работы по состоянию тепловых потерь в двигателе привода в конце предыдущего цикла работы.На фиг. 1 приведена общая функциональная схема предлагаемого регулятора; на фиг, 2 - функциональная схема командного блока; на фиг. 3 - временные диаграммы работы регулятора; на фиг. 4 -- кривая, характеризующая изменение длительности цикла обработки в зависимости от изменения кратности тока торможения (темпа торможения).Цифровой регулятор перемешения длин- номерного материала в рабочую зону обрабатываюшей машины содержит залатчик 1 величины подачи, реверсивный сцетчик 2, командный блок 3, привод 4 подачи, состоящий из усилительно-преобразователыгого каскада 5 и двигателя 6 с датчиком 7 тока, датчик 8 величины подачи с мерительным роликом 9, взаимодействующим с материалом 10 (полосой или лентой), блок 1 напряжения,пропорционального квадрату мгновенного тока двигателя, источник 12 напряжения, пропорционального квадрату номинального тока двигателя, блок 13 сравнения, интегратор 14, нуль-орган 15, инверторы 16 и 17, элементы ЗИ 18, 2 И 19 и 20, элемент ИЛИ 21, элемент 22 задержки, дополнительный реверсивный счетчик 23, олновибратор 24, усилитель 25, ключи 26(1) - 26(п+1), резисторы 27(1) - 27(п+3), элемент И - НЕ 28 и вход 29 регулятора.Двигатель 6 связан с подающими валками 30 и 31, у которых установлен исполнительный орган 32 обрабатьваюцей машины (например, ножницы). Датчик 8 величины подачи подключен к вычитающему входу реверсивного счетчика 2. Один вход блока 13 сравнения подключен к источнику 12 напряжения, второй (вычитаюший) вход блока 13 подклюцен к выходу блока 11 напряжения, пропорционального квадрату мгновенного тока двигателя 6, вход которого соединен с выходом датчика 7 тока лвигате ля. Выход блока 13 сравнения подключен к входу интегратора 14, выход которого соединен с входом нуль-органа 15. Вход усилителя 25 подключен к первому выходу ко мандного блока 3, а выход - к приводу 4 подачи.Резисторы 27 (1) - -27 (и) вклюцены параллельно друг другу через ключи 26(1) - 26(п) с размыкаощими контактами и с резистором 27(п+1) параллельно усилителю 25. Резистор 27(п+2) включен параллельно интегратору 14 церез ключ 26(п.+1) с замы 5 10 )5 20 25 30 35 40 45 50 55 кающим контактом, а резистор 27 (п+3) включен между источником напряжения, величина которого соответствует уровню логической единицы Елх, и первыми входами первого 18 и второго 19:лементов И, входом одновибратора 24 и через размыкаюший контакт исполнительного органа 32 обрабатываюшей машины с нулевым полюсом источника питания.Выход одновибратора 24 подключен к управляющему входу ключа 26(п+1) и к пер вому входу элемента ИЛИ 21, второй вход которого соединен с выходом инвертора 16. Вход инвертора 16 подключен к входу 29 устройства, входу элемента 22 задержки и к установочному входу дополнительного реверсивного счетчика 23. Суммирующий вход дополнительного реверсивного счетчика 23 соединен с выходом элемента ЗИ 18, второй вход которого полк.ночен к выходу нуль- органа 15 и к входу инвертора 17. Выход инвертора 17 соединен с вторым входом элемента 2 И 19, выход которого соединен с вычитающим входом дополнительного реверсивного счетчика 23. Выходы последнего подключены к соответствуюшим цепям управления ключей 26(1) - 26(п) и к входам элемента И - НЕ 28, выход которого соединен с третьим входом элемента ЗИ 8,Выход элемента ИЛИ 21 соединен с входом предварительной записи реверсивного счетчика 2. Второй выход командного блока 3 подклюцен к первому входу элемента 2 И 20, второй вход которого соединен с выходом элемента 22 задержки, а выход подключен к входу исполнительного органа 32 обрабатывающей машины.Командный блок (фиг. 2) содержит функциональный цифроаналоговый преобразователь 33, выходной сигнал которого связан с рассогласованием по перемещению параболической зависимостью, элемент ИЛИ 34 и элемент 1 ЛЛИ - НЕ 35. Так как разрядность функционального цифроаналогового преобразователя 33 выбирается исходя из требуемого пути торможения материала с максимальной скоростью, выходы старших разрядов реверсивного счетчика 2 подключены к входам элемента ИЛИ 34, выход которого соединен с входом старшего разряда функционального цифроаналогового преобразователя 33. Выходы младших разрядов реверсивного счетчика 2 соединены с соответствующими входами функционального цифроаналогового преобразователя 33. Выходы реверсивного счетчика 2 подключены также к входам элемента ИЛИНЕ 35.При пуске, т.е. после подачи сигнала на вход регулятора 29, обнуляется дополнительный реверсивный счетчик 23, а в реверсивный счетчик 2 при помощи залдтцика 1 величины подаци, выполненного, например, на программных переклкцателях, вводится информация о величине подачи материала.Командный блок 3 вырабатывает в определенной последовательности команды лляуправления процессом подачи и на сргба гы.вание исполнительного органа 32 обрабатывающей машины. Привод 4 подачи при помощи валков 30 и 31 отрабатывает заданное перемещение обрабатываемого материала, в результате чего приводится во вращение мерительный ролик 9. Сигнал от датчика 8 величины подачи поступает на вход реверсивного счетчика 2, уменьшая число, содержащееся в нем.После отработки заданной величины подачи командный блок 3 вырабатывает сигнал на срабатывание исполнительного органа 32 обрабатываюгцей машины.В течение всего цикла работы на входинтегратора 14 подается величина, пропорциональная разности квадратов номинального тока двигателя и мгновенного значения тока двигателя. Интеграл этой разности является величиной, характеризующей состояние тепловых потерь в двигателе с начала и до конца любого цикла. Если эта величина в конце цикла имеет нулевое или положительное значение, что свидетельствует о допустимь 1 х по условиям нагрева потерях в двигателе, на выходе нуль-органа 15 формируется логическая единица. Если этот интеграл имеет отрицательное значение, что свидетельствует о недопустимых тепловых потерях в двигателе, на выходе нуль-органа 15 формируется логический нуль.После первого срабатывания исполнительного органа 32 обрабатывающей машины на выходе нуль-органа 15 формируется логическая единица, что обуславливается минимальным темпом замедления привода подачи в конце первого цикла (фиг. 3).Последнее обеспечивается тем, что усилитель 25 в течение первого цикла оказывается охваченным сильной обратной отрицательной связью при помощи параллельно включенных резисторов 27 (1) - 27 (и) через ключи 26(1) - 26(п). Это приводит к уменьшению крутизны характеристики, определяющей зависимость задающего напряжения в функции остатка пути отработки.При наличии логической единицы навыходе нуль-органа 15 после срабатывания исполнительного органа 32 обрабатывающей машины в дополнительный реверсивный счетчик 23 через элемент ЗИ 18 записывается единица, а в основной реверсивный счетчик 2 вводится информация о величине подачи и цикл повторяется.Темп замедления привода в конце второго цикла выше, чем в конце первого, так как отрицательная обработная связь усилителя 25 под действием единицы в дополнительном реверсивном счетчике 23 уменьшается за счет того, что открывается ключ 26(а) и отключает резистор 27(п), После отработки второго цикла при наличии логической единицы на выходе нуль-ор 5 10 15 20 25 30 35 40 45 50 55 гана 15 открывается ключ 26 (ц - 1) и отключает резистор 27 (и - -1), ключ 26(л) закрывается и подключает резистор 27(п), сопротивление которого выбрано большим, чем сопротивление резистора 27(п - 1). Это приводит к дальнейшему увеличению темпа замедления привода подачи в конце трегьего цикла.Форсировка темпа замедления производится до тех пор, пока на выходе нуль-органа 15 (в конце цикла) формируется логическая единица, вызывающая увеличение числа, содержащегося в дополнительном реверсивном счетчике 23, что приводит к увеличению общего сопротиг,леция резисторов в цепи отрицательной обратной связи усилителя 25.Если на выходе нуль-органа 15 по истечении а циклов формируется логический нуль, свидетельствующий о недопустимых тепловых потерях в двигателе, на выходе инвертора 17 формируется логическая единица, которая через элемент 2 И 19 поступает на вычитаюший вход дополнительного реверсивного счетчика 23. Число, содержащееся в этом счетчике, уменьшается, и обратная связь усилителя 25 возрастает. Темп замедления привода при отработке последующего цикла уменьшится.При накоплении в дополнительном счетчике 23 числа и (например, при изготовлении длинных технологических карт) элементы ЗИ 18 блокируются и работа производится с максимальным темпом замедления привода 4 подачи, так как в цепи обратной связи усилителя 25 остается включенным только резистор 27(л+1).Следовательно, предлагаемый цифровой регулятор перемещения длинномерного материала в первые несколько циклов производит самонастройку на максимальную производительность с дальнейшим автоматическим поддержанием тепловых потерь в двигателе на уровне допустимых путем автоматического регулирования темпа замедления привода в конце каждого последующего цикла работы цо состоянию тепловых потерь в двигателе в конце предыдущего цикла. Эта регулировка производится таким образом, чтобы действующее значение тока двигателя за цикл удерживалось на уровне значения номинального тока. При этом повышается производительность регулятора, так как работа производится прц минимальной бестоковой паузе, обусловленной, в основном, временем срабатывания исполнительного органа обрабатывающей машины.На фцг. 3 приведены времеццые диаграммы изменения скорости Ъ обрабатываемого материала 10 прц порезке коротких заготовок; квадрата номинального тока 1 - двигателя, пропорционального выходному напряжению источника 12; квгдр гга чгцо)венного тока ь- двигателя, цропорццоцал;(8) 5ного выходному напряжению блока 11, разности 1 - ы (пропорциональнОЙ входному напряжению интегратора 14; выходного напряжения 1(и интегратора 14 и выходного напряжениямк нуль-органа 15.Из приведенных диаграмм видно, что напряжение Б ., соответствующее логической единице, формируется в интервале времени, когда потери в двигателе по условиям нагрева ниже допустимых. Форсировка темпа замедления на приведенных диаграммах производится до четвертого цикла. В конце четвертого цикла выходное напряжение нуль-органа 15 равно нулю. Поэтому темп замедления в пятом цикле уменьшается.Номиналы резисторов 27 (1) 27(и ), а также их количество выбираются исходя из тЕМПа ЗаМЕДЛЕНИЯ ПРИВОДа амакс, ОПРЕДЕЛЯЮ- щего максимальную производительность, минимального темпа замедления ам н и выбранного максимального приращения темпа замедления при обработке заготовки наиболее ходового типоразмера да.За минимальный темп замедления амин принимаетя такойтемп, при котором тепловые потери в конце цикла при обработке заготовок требуемой минимальной длины с учетом максимальной нагрузки двигателя, а также времени срабатывания ножниц, равны допустимым,В случае применения двоичного счетчика 23 номиналы резисторов 27(1)- 27(п) должны составлять ряд возрастающей геометрической прогрессии, 1-й член которого определяется зависимостьюК;= К 2 (1) где Квесовое сопротивление.Максимальная проводимость резисторов в цепи обратной связи усилителя 25 определяется зависимостью 1 1 1+Е, ( 2 Кмин Кмакс см 4 К 2 где Кчнн и - эквивалентные сопротивления в Киакс. - ЦЕПИ ОбраноЙ связи у 4 СИЛИтЕЛя25 соответственно при минимальном (ам. ) и максимальном (амакс темпах замедления;и - число коммутируемых резисторов.Так как второй член правой стороны выражения (2) является бесконечно убывающей геометрической прогрессией с знаменателем с(= - , выражение (2) можно+ (1ККлаас К 2" Максимальное приращение величины эквивалентного сопротивления в цепи обратной связи усилителя 25 определяется вы- ражением К.К 2"К,н,-,. К 2"(4( 10 где Кчак. - сопротивление резистора 27(п+1). На основании выражения (4) Подставляя выражение (5) в уравнение (3) (после несложных преобразований), получим зависимость для определения числа коммутируемых резисторов 1 д+1 К.и К. .4( (Кюа - ЬКпс( Кмин Кос 25 Учитывая, что эквивалентное сопротивление в цепи обратной связи усилителя 25 прямо пропорционально темпу замедления привода подачи и что приращение величины эквивалентного сопротивления прямо пропорционально приращению темпа замедЗ 0 ления, выражение (6) можно представитьв видеНа основании выражения (5) определяемК=2,97 кОм. Принимаем 3 кОм. Следовательно К 27(1) = 3, К 27(2) = 6, К 27(3) =-- 12, К 27 (4) = 24, К 27(5) = 48 и К 27(6) ==96 кОм.Эффективность гредлагаемого цифрового регулятора подтверждается следуюГЦИ М.Пусть разгон и торможение приводовизвестного и предлагаемого цифровых регуляторов производится по линейному во времени закону, при котором справедливы 55соотношения(20) Я= Ьр+ Ьт енств этом справедли(20При Кт=двигателе рацикла в этом 1+Д) . а. Кр --тепловые пот допустимым. Длитель ччае определяется как ний (8) - (11) следует подняться К р+ К,Ь) 1 р+ . Из неравенства (23)- Ктк -(23 ар ат 3)30 а.) лучаем пренебр а валу ние пр тельно тью При ментом н ля ускор теля. Дл зависимо 24) я (24) можно пол После преобразовить неравенство г+Кр КРешая неравенство , найдем 5) О,(14 осительн(16 1 н я выЭта льнот из(тем- ровом аль 5 ода при ноеля, 5) и (16) в где а. - ускорение прином токе двигаПодставив выражениялу (14), получим ц= Кр 1 р+ С учетот12) и 13 пока- тока ньша- ность ражение (17 примет вид 1 ц= где Ь - путь разгона;Ь - путь торможения;1 - время разгона;Ь - время торможения;ар - ускорение при разгоне;а. - ускорение при торможении;Ч=а 1 начальная скорость при торможении.В этом случае при обработке коротких заготовок временная диаграмма скорости треугольная и путь перемещения определяется как жении статическим моисполнительного двигатеорционально току двигаь цикла 1 определяется е 1 р - ток двигателя при разгоне;1. - ток двигателя при торможении1. - номинальный ток двигателя.Обозначим Учитывая, что в известном устройстве К = К., длительность его цикла определяется как Об изменении длительности цикла предлагаемого регулятора по сравнению с известным можно судить по отношению ц/цц, 1 О которое на основании уравнений (18) и (19)определяется как 15 Обозначив - р получим Кт Рц= 1 р+ 1 тВ общем случае долж словие Учитывая, что для известного устра р= 1, можно указать пределы измедля предлагаемого регулятора К,- 1Условие (23) вып чениях 1 ь, удовлетворя Кривая ц/цц= 1( ражением (21), прив кривая характеризует сти цикла обработки менения кратности т па торможения) в пр регуляторе по сравне Анализ зависимос зывает, что с умень торможения длитель ется, следовательно цифрового регуляторолняется при всехющих выражениюр), определяемаедена на фиг. 4изменение длитев зависимости оока торможенияедлагаемом цифнию с известным.ти 1 ц+1 цп= 1шением кратностиность цикла умепроизводитезьа возрастает.форчули изобрегенигЦифровой регулятор перемещения длин- номерного материала в рабочуго зону обрабатывающей машины, содержащий задатчик величины подачи, реверсивцый счетчик, ко 5 мандный блок, исполнительныи орган обрабатывающей машины с размыкающим контактом, датчик величины подачи, подключенный к вычитающему входу реверсивного счетчика, привод подачи, входом которого является вход усилительно-пресбразо О вательцого каскада, а также блок напряжения, пропорционального квадрату мгновенного значения тока двигателя, и источник напряжения, величина которого пропорциональна квадрату номинального тока двигателя, подключенные к последовательно сое 15 дицеццым блоку сравнения, интегратору и нуль-органу, от,ггиагоигггсге,г тем. что, с целью повышения производительности путем антоматической регулировки темпа замедления привода в конце каждого последующего цикла работы по состоянию тепловых потерь в двигателе привода в конце предыдущего цикла, он снабжен дополцительным реверсивным счетчиком, двумя инверторами, элементом И - НЕ, тремя элементами И, элементом ИЛИ, элементом задержки, однсвибра тором, гг ключами с размыкающим контактом, ключом с замыкающим контактом (гг+3) резисторами и усилителем, вход которого соедицец с первьгм выходом командного блока, а выход - с входом привода подачи, при этом вход и выход усилителя З 0 соединены включенными параллельно между собой через первые гг резисторов ключами с размыкаюшими контактами, управляющие входы которых соединены с выходом дополнительного реверсивного счетчика и входами элемента И - НЕ, (и+1) -й резистор включен параллельно усилителю, а (п+2)-й резистор подключен к входу интегратора и через ключ с замыкающим контактом к его же выходу, при этом управляющий вход ключа с замыкающим контактом соединен с выходом одновибратора и первым входом элемента ИЛИ, второй вход которого через первый инвертор соединен с входом элемента задержки и сбрасывающим входом дополнительного реверсивного счетчика, а выход соединен с входом разрешения записи реверсивного счетчика, второй выход командного блока соединен с первым входом первого элемента И, второй вход которого соединен с выходом элемента задержки, а выход - с управляющим входом размыкаюшего контакта исполцительного органа обрабатывагощей машины, подключающего соединенные между собой первые входы второго и третьего элементов И, вход одновибратора и (и+3)-й резистор - к нулевому потенциалу, выход нуль-органа подключен к второму входу второго элемента И и через второй инвертор к второму входу третьего элемента И, выход которого соединен с вычитающим входом дополнительного реверсивного счетчика, а с суммирующим входом - выход второго элемента И, третий вход которого соединен с выходом элемента И - НЕ, кроме того, через (и+3)-й резистор размыкающий контакт исполнительного органа обрабатывающей машины подключен к уровню напряжения логической единицы.1274821 0,9 О О г.Ф В. Ткаченк с 11303илиал,СоставительТехрсд И. ВереТираж 783ИПИ Государственногоо делам изобретенийМосква, Ж - 35, РауПП Патент, г. Уж го Редактор А. ШишкинаЗаказ 6516/10ВНИ Корректор ЛПодписноекомитета СССРи открытийшская наб., д. 4/5од, ул. Проектная,
СмотретьЗаявка
3897329, 20.05.1985
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ И ПРОИЗВОДСТВА
КАПУСТНИК ИВАН ПЕТРОВИЧ, КОКОРЕВ ВАЛЕРИЙ ФЕДОРОВИЧ, ПАВЛОВ АНДРЕЙ ИВАНОВИЧ, СУЯРКО СЕРГЕЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: B21D 43/00, G05B 19/00
Метки: длинномерного, зону, обрабатывающей, перемещения, рабочую, регулятор, цифровой
Опубликовано: 07.12.1986
Код ссылки
<a href="https://patents.su/8-1274821-cifrovojj-regulyator-peremeshheniya-dlinnomernogo-materiala-v-rabochuyu-zonu-obrabatyvayushhejj-mashiny.html" target="_blank" rel="follow" title="База патентов СССР">Цифровой регулятор перемещения длинномерного материала в рабочую зону обрабатывающей машины</a>
Устройство для управления группой n статических преобразователей частоты, включенных параллельно по входу и выходу

Номер патента: 1388973
Опубликовано: 15.04.1988
Авторы: Анисимов, Артюхов, Бочков, Кантер, Серветник, Томашевский
МПК: H02M 5/44
Метки: включенных, входу, выходу, группой, параллельно, преобразователей, статических, частоты
...16 появляетл ся сигнал единичного уровня, которыйрез приводит к отключению одного преобие разователя из группы работающих преобразователей снятием импульсов упкий 20 равления с входа выпрямителя 1, переводя его в состояние готовности коперативному включению, при этомконденсатор фильтра 2 указанного блока остается заряженным. Одновременно25 отключается еще один преобразователь,находившийся до этого в состоянии готовности к включению, посредствомразмыкания силовых ключей 5 и 6,Здесьг. 40, в 0 - величины, расширяющие диаЗО пазон, характеризуемый постоянствома структуры силовой схемы статическихпреобразователей. Они задаются напряжением смещения Ц подаваемым навы- прямой вход первого компаратора 15ав- и инверсный вход второго...
Дифференцирующее устройство

Номер патента: 516063
Опубликовано: 30.05.1976
Автор: Каледин
МПК: G06J 3/00
Метки: дифференцирующее
...записывается в качестве числа начального состояния счетчика. Счетчик 5 осуществ,151- ет выборку фазовых импульсов, которые формируются на выходе счетчика в моменты его переполнения, Таким образом, счетчик формирует суммарные периоды выходного напряжения сс фазовращателя 1. Выходные импульсы счетчика 5 поступают на первый вход управляющего триггера 8 и через дополнительную линию 9 задержки на второй его вход. Выходной потенциал одного плеча управляющего триггера 8 проходит на управляющий вход элемента И 10 и осущесгвг 5 ет УРявленцс зсцОхиение)1 ссетч ика 1 1 .МИУгнз Я.)1 сКТОВОЙ ЯСТОТЫ /тц, ПОСТУПс 10 ЦМИ Ня его счегный вход с генератора "; через второй Вход элемента И 10. Время заполнения 5 сс(чика 11 равно периоду ТццГаОПего...
Аналого-цифровой преобразователь

Номер патента: 657608
Опубликовано: 15.04.1979
Авторы: Аникин, Бабанов, Куцаков, Лукьянов
МПК: H03K 13/18
Метки: аналого-цифровой
...т,е. приводит Ф" двойной дополнительной погрешности, в результате чего 5 Овремя разинтегрирования уменьшается и нуль- орган 12 срабатывает (диаграмма "Я") раньше, чем это произошло бы при отсутствии абсорбционного эффекта.Для компенсации этой погрешности в АЦП 55 введены два конденсатора 13, 14 и резистора 15, 16 и соединены с ними два ключа 27 и 28. В момент первого срабатывания нуль. орган 12 триг; гера 17 управления компенсацией абсорбционного заряда конденсатора 11 переключается(диаграмма "е") и запускает формирователь 18,сигнал "ж" которого открывает ключ 27 и на.копленный конденсатором 13 заряд передаетсяконденсатору 11. Образовавшееся напряжение"з. продолжает разинтегрироваться до второго нуль-органа 12. В течение этого...
Устройство для обнаружения и измерения экстремумов сигнала

Номер патента: 785774
Опубликовано: 07.12.1980
Авторы: Москвин, Пунсык-Намжилов, Рязанов
МПК: G01R 19/04
Метки: обнаружения, сигнала, экстремумов
...с поступлением входного сигнала х(1) происходит запуск генера тора 13 и через делитель 12 запускгенератора 3 развертывающего напрякения, На вход элемента И 8 с выхода нуль-органа 1 подается 1.(фиг.2 а), Импульсы с генератора 13,проходя через элемент И 8, суммируются на счетчике 11 до тех пор, пока не произойдет пепвого сравнения:входного сигнала с развертывающимнапряжением (фиг, 2 з ),При достижении развертывающимнапряжением входного сигнала х(1)(фиг 26 и в) и запускается одновибратор 6 (фиг,2 г).Таким образом, насчетчике 11 просуммировались импульсы, количество которых пропорцио-нально амплитуде входного сигналах(1),При достижении развертывающим напряжением сигнала х(1)+хц (моментвремени 1, фиг,2) срабатывает нульорган 2 и...
Адаптивное мажоритарное устройство

Номер патента: 792616
Опубликовано: 30.12.1980
Авторы: Володось, Милосердов
МПК: H05K 10/00
Метки: адаптивное, мажоритарное
...которыхподсоединены попарно к выходам резервируемых блоков 1.Блоки 4 адаптации содержат переключатели16, к входам которых попарно подключенывыходы соответствующих элементов совпадения 15 и антисовпадения 14, счетчики 17 им.пульсов, триггеры 18.Устройство работает следующим образом,Пусть исходное состояние триггера 10 впервом канале соответствует корректирующему сигналу "1" (преобладают сбои типа"ложный 0"). При появлении на выходепервого резервируемого блока 1 сигнала,не совпадающего с сигналом Е на выходемажоритарного элемента 6, элемент 14 анти.совпадения первого блока контроля вырабатывает импульс, который поступает на счетный вход счетчика 11 и подключает с помощью ключа 7 выход первого блока 1 ковходу элемента 8 совпадения....
Предыдущий патент: Устройство для центрирования материала в зоне обработки
Следующий патент: Устройство для подачи и удаления плоских заготовок
Случайный патент: Устройство для проверки гидросистем летательныхаппаратов