Патенты с меткой «робот»
Промышленный робот

Номер патента: 1779578
Опубликовано: 07.12.1992
Автор: Литвиненко
МПК: B25J 11/00
Метки: промышленный, робот
...между собой шарниром17, при этом обоймы каждой части руки жестко связаны между собой и через шарнир18 с другим концом тяги 14, Все приводывыдвижения с якорями установлены наплатформе 19, закрепленной на выходномэлементе привода 20 подъема платформы,при этом привод 20 в свою очередь закреплен на выходном элементе привода 21 поворота, установленного на основании 1.Устройство работает следующим образом.Поворот и подьем руки осуществляетсяприводами 20 и 21, а выдвижение с помощью приводов 7 и 11. При раздельной работе приводов 7 обеспечивают срабатывание схвата, Перемещение якорей 6 происхо 303540 45 возможностей за счет увеличения числа степеней подвижности схвата, он снабжен тягой и штоком с приводом его перемещения в...
Робот для перемещения по вертикальным поверхностям

Номер патента: 1779579
Опубликовано: 07.12.1992
Автор: Левин
МПК: B25J 11/00
Метки: вертикальным, перемещения, поверхностям, робот
...чертеже изображен предлагаемыйробот.На вертикальной поверхности 1 с помощью захватов 2 и 3 закрепляется направляющая 4, которая может свободновращаться относительно горизонтальныхосей 5 и 6 захватов, Платформа 7 с расположенным на ней приводом 8 может перемещаться относительно направляющей 4.Привод 8 связан с направляющей 4 с помощью, например, тросов 9, которые наматываются на вал привода.Движение робота осуществляется следующим образом,В исходном состоянии захваты 2 и 3,выполненные, например, в виде вакуумныхприсосок, закреплены; на вертикальнойповерхности 1; Платформа 7 находится между захватами. При необходимости переместиться вверх платформа 7 с помощью привода 8, связанного с направляющей 4 с помощью, например тросов 9,...
Робот
Номер патента: 1781026
Опубликовано: 15.12.1992
Авторы: Агапеев, Астахов, Гулин, Кленин
МПК: B25J 11/00
Метки: робот
...Перед основанием расположен стол,который необходим для направленного перемещения заготовок.На фиг.1 показан общий вид устройства; на фиг.2 - то же, вид сверху.Робот состоит иэ двух направляющих 1, соединенных тремя поперечинами 2, закрепленными на основании 3, выполненном в виде ферменной конструкции, Основание 3 при работе совместно со станком резки листового материала (не. показан) крепится снаружи станка. На основании 3 неподвижно закреплен пневматический привод 4 двухстороннего действия, шток 5 которого соединен с корректирующим механизмом 6, состоящим из стержня 7, на котором закреплены толкатели 8, шарнирно закрепленными посредством оси 9 на корпусе 10 механизма 6, и демпфирующих пружин 11. Корпус 10 посредством роликов 12...
Шагающий робот для перемещения по произвольно ориентированной в пространстве поверхности
Номер патента: 1782849
Опубликовано: 23.12.1992
Авторы: Рачков, Самохвалов
МПК: B62D 57/02
Метки: ориентированной, перемещения, поверхности, произвольно, пространстве, робот, шагающий
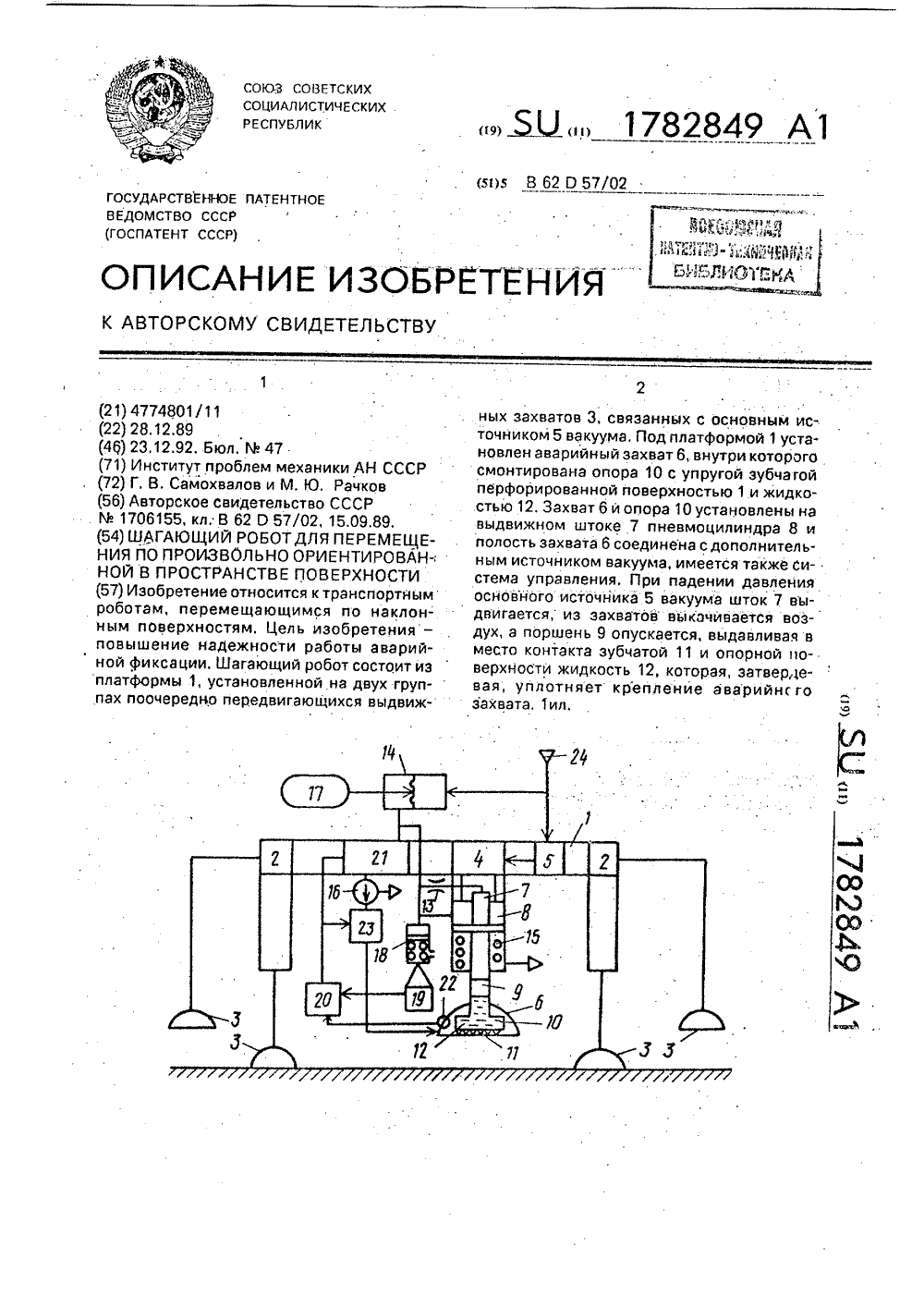
...с основным источником вакуума 5, в качестве которого может быть использован эжектор. Аварийный захват 6 связан с полым штоком 7 пневмоцилиндра 8, который установлен на платформе 1 параллельно оси захватов 3 и имеет соединенную с атмосферой нижнюю полость с размещенной в ней пружиной 15, В штоке 7 размещено средство механической фиксации захвата нэ опорной поверхности в виде подвижного уплотняющего элемента 9 (поршень или мембрана), Опоры 10 с упругой зубчатой поверхностью 11 и промежуточной жидкостью 12, Верхний конец штока 7 гибкой связью через дроссель 13 соединен с выходом одномембранного элемента 14 и с верхней полостью цилиндра 8, в нижней полости которого установлена пружйна 15, а также связан с входом эжектора 16, ис. пользуемого...
Промышленный робот

Номер патента: 1805028
Опубликовано: 30.03.1993
Автор: Литвиненко
МПК: B25J 11/00
Метки: промышленный, робот
...на аналогичную прокладку 50, вом заявленного устройства являются расПолый цилиндрический якорь 7 имеет кол ширенныефункциональные возможности лектор 51 и щеткодержатель 52; Подшипни- за счет манипулирования с увеличенной маки со стороны коллектора. укреплены на невренностью и повышенная надежность, основании 53. Стаканы якорей укреплены вызванная возможность взятия предмета на валах 54 в подшипниках 55. при произвольном его положении в вертиРабата устройства, Поскольку конструк кальной плоскости. При этом данные претивное исполнение привода горизонтально- имущества подкреплены сравнительно го перемещения не претерпевает простым конструктивным решением дополизменений; т.е. остается таким же, как, на- нительной степени...
Промышленный робот

Номер патента: 1808686
Опубликовано: 15.04.1993
Авторы: Джамалов, Джолдасбеков, Измамбетов, Слуцкий
МПК: B25J 9/00
Метки: промышленный, робот
...органом 1, располо жены на одной прямой. Направляющие 9, 10, 11 закреплены на поворотном основании 15. Звено 5 (или звено 4) снабжены упорами 16, 17, на которых размещены концевые выключатели (не показаны). Соответ ствующие приводные двигатели начертежах не показаны.Робот работает следующим образом, При вращении винтов 12, 13, 14 гайки 6, 7, 8 перемещаются по направляющим 9, 10, 30 11. При этом звенья 3, 4, 5, шарнирно связанные с гайками Ь, 7, 8, поворачиваются на заданные углы и при этом перемещают рабочий орган 1 с захватом 2 в требуемую, точку зоны обслуживания. 35Упоры 16 и 17 ограничивают угловое перемещение звена 5 относительно гайки 8 таким образом, чтобы оси звеньев 4, 5 не находиливь в одной плоскости. При подходе...
Промышленный робот

Номер патента: 1808687
Опубликовано: 15.04.1993
Авторы: Джамалов, Измамбетов, Слуцкий
МПК: B25J 9/00
Метки: промышленный, робот
...и при автоматизации ручных, монтажных и погру- этом перемещают рабочий орган 1 с захваэочно-разгрузочных работ, том 2 в требуемую точку зоны обслуживаЦелью изобретения является упроще ния. По сравнению с прототипом при ние управления промышленным роботом. работе предлагаемой конструкции не возНа чертеже изображена предлагаемая никает конфигурация, образующая паралконструкция промышленного робота в про- лелограммный механизм, поэтому нет екции на базовую плоскость ХЧ. необходимости введения вышеуказанногоПромышленный робот содержит рабо-. 10 дополнительного модуля в программное чий орган 1, выполненный в виде ступенчато- обеспечение, что в свою очередь упрощает го вала с закрепленным на его щеке захватом управление промышленным...
Водозаборный робот дождевальной машины

Номер патента: 1822676
Опубликовано: 23.06.1993
Авторы: Бубенчиков, Митрюхин, Сирко
МПК: A01G 25/09
Метки: водозаборный, дождевальной, робот
...сбросного узла установлен у выходного конца проходного корпуса 23 на корпусе расширительной камеры 24 и их внутренние полости сообщаются между собой. Корпус патрубка 25 выполнен разъемным и содержит в нижней части жесткую диафрагму 30, отверстие 31 которой перекрыто подпружиненным клапаном 32 запорного элемента, размещенном в верхней съемной части корпуса патрубка 25, где ус 40 тановлена направляющая втулка 33 на крестовине 34, жестко связанной с корпусом.На штоке 35 клапана 32 имеются элементыприсоединительной головки 17 совмещена с продольной осью стояка 16 водовыпуска, а захваты 15 подвижных штанг 14 расположены под фланцем,стояка 16 водовыпуска, Срабатывает гидроцилиндр 11 и происходит автоматическое подключение по заданной программе...
Промышленный робот
Номер патента: 1304292
Опубликовано: 15.12.1994
Авторы: Назаров, Панасенков, Софронов
МПК: B25J 11/00, B25J 9/14
Метки: промышленный, робот
ПРОМЫШЛЕННЫЙ РОБОТ, содержащий шарнирно связанные звенья, силовые цилиндры, штоки которых через фиксатор, имеющий стержень, шарнирно связаны с соответствующими звеньями, а корпусы - с основанием, и систему управления, отличающийся тем, что, с целью повышения производительности и срока службы за счет снижения ударных нагрузок, каждое звено снабжено ограничителем хода поршня силового цилиндра, выполненным в виде шарнирно связанного с звеном стержня, на конце которого расположен первый упругий элемент, взаимодействующий с корпусом силового цилиндра, а в поршневой полости силового цилиндра расположен второй упругий элемент, при этом стержень фиксатора параллелен стержню ограничителя хода поршня.
Проходческий робот и транспортирующий механизм проходческого робота
Номер патента: 1549153
Опубликовано: 10.10.1995
Авторы: Гришин, Дворников, Ершов, Жуков, Замулин, Пономарев, Туров, Хромых, Шапошников
МПК: E02F 5/18
Метки: механизм, проходческий, проходческого, робот, робота, транспортирующий
1. Проходческий робот, включающий буровую головку с рабочим органом, выполненную в виде связанных между собой посредством управляемого отклонителя передней и задней секций, первая из которых состоит из двух коаксиально установленных цилиндров, транспортирующий механизм со шламопроводом, который связан с внутренним цилиндром передней секции буровой головки, шнек, размещенный во внутреннем цилиндре, привод вращения шнека, податчик и кабельные коммуникации, отличающийся тем, что с целью расширения области применения при одновременном повышении ремонтопригодности и надежности работы, робот снабжен гибкой в поперечном направлении скользящей опалубкой, опорными элементами и дополнительными приводами вращения, шламопровод выполнен в виде гибкого...
Проходческий робот

Номер патента: 1621582
Опубликовано: 10.10.1995
Авторы: Дворников, Жуков, Шапошников
МПК: E02F 5/18
Метки: проходческий, робот
...секция буровой головки снабже-, на сферическими опорными элементами, выполненными в виде цилиндров, установленных на сегментах сфер 37, жестко закрепленных на корпусе 38 задней секции 2. Секция имеет передний 39 и задний 40 опорные элементы, На заднем опорном эле- . менте 40 выполнены шлицы 41, установленные по одной линии с шлицами 17, 18 и 19 опалубки 5. На корпусе 38 установлены силовые элементы 42 с приводом 43. Каждый силовой элемент 42 связан с соответствующим ему карданным шарниром 3.Позади забойной головки установлен погружной податчик, выполненный в виде набора тяговых шасси 44, связанных между собой и с задней секцией буровой головки посредством карданных шарниров 45. Тяговое шасси 44 имеет приводные катки 46 и...
Проходческий робот

Номер патента: 1637394
Опубликовано: 10.10.1995
Авторы: Гришин, Дворников, Шапошников
МПК: E02F 5/18
Метки: проходческий, робот
...механизмов 12 с цилиндром 13. С валом мотор-редуктора 11 жестко связан торсионный вал 14, на другом конце которого по шлицевой посадке установлен винт 15, имеющий на концах резьбу разного шага. На внутренней поверхности цилиндра 13 дифференциального механизма 12 выполнена резьба 16, взаимо-действующая с одной резьбой винта 15. Конец входного звена 3 выполнен полым с внутренней резьбой 17 и в нем установлен другой резьбой винт 15, образуя вращательную пару. Звено 3 зафиксировано от проворота посредством шпоночного соединения 18 с цилиндром 13. Поперечная "0 ось вращения шарниров параллельна осивращательной пары и ориентирована с эксцентриситетом по отношению к ней.Робот работает следующим образом.При проходв прямолинейных участков...
Подводный робот
Номер патента: 1434675
Опубликовано: 20.06.1996
МПК: B63B 21/00
Метки: подводный, робот
Подводный робот, содержащий корпус в виде герметичного цилиндра, движители вертикального и горизонтального ходов, телекамеру и манипулятор с захватами, электрически связанные с системой управления, отличающийся тем, что, с целью повышения эксплуатационной надежности, корпус снабжен вторым герметичным цилиндром, жестко связанным с первым в кормовой части поперечной планкой, манипулятор выполнен П-образным из двух штанг, соединенных стержнями, установленных на корпусе с возможностью вращения вокруг поперечной оси в шарнирах, закрепленных на соответствующих герметичных цилиндрах, и радиального перемещения относительно поперечной оси, а захваты выполнены двустворчатыми и установлены на концах штанг шарнирно с возможностью вращения вокруг...
Промышленный робот
Номер патента: 1677959
Опубликовано: 27.11.1996
Авторы: Назаров, Таджиев, Хасанов, Ходжиев, Ширмухамедов
МПК: B25J 9/00
Метки: промышленный, робот
Промышленный робот, содержащий основание, размещенные на нем звенья вращательного и поступательного перемещений, кинематически связанные между собой и с помощью сцепных устройств с приводом, имеющим корпус и выходные подвижные элементы, а также захватный орган и систему управления, отличающийся тем, что, с целью повышения быстродействия, сцепные устройства выполнены в виде управляемых схватов, с помощью которых ведущие элементы каждого звена связаны по крайней мере двумя из них с выходными подвижными элементами привода, а одним из них с корпусом привода, установленного на одном из звеньев.
Промышленный робот
Номер патента: 1598380
Опубликовано: 27.11.1996
Авторы: Назаров, Таджиев, Талипов, Хасанов, Ходжиев, Ширмухамедов
МПК: B25J 9/00
Метки: промышленный, робот
Промышленный робот, содержащий установленную на основании платформу с приводом ее продольного перемещения, на которой размещены направляющие, каретку с приводом ее перемещения, расположенную в этих направляющих, и установленное на каретке выходное звено с приводом его перемещения в направлении, перпендикулярном направлению перемещения каретки, отличающийся тем, что, с целью улучшения массогабаритных показателей за счет уменьшения количества двигателей приводов, все приводы содержат один общий для них электрический вибратор, установленный на платформе, при этом привод перемещения платформы включает стержень, установленный на основании вдоль направления перемещения платформы, и три управляемые муфты, расположенные с возможностью их...