Робот
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
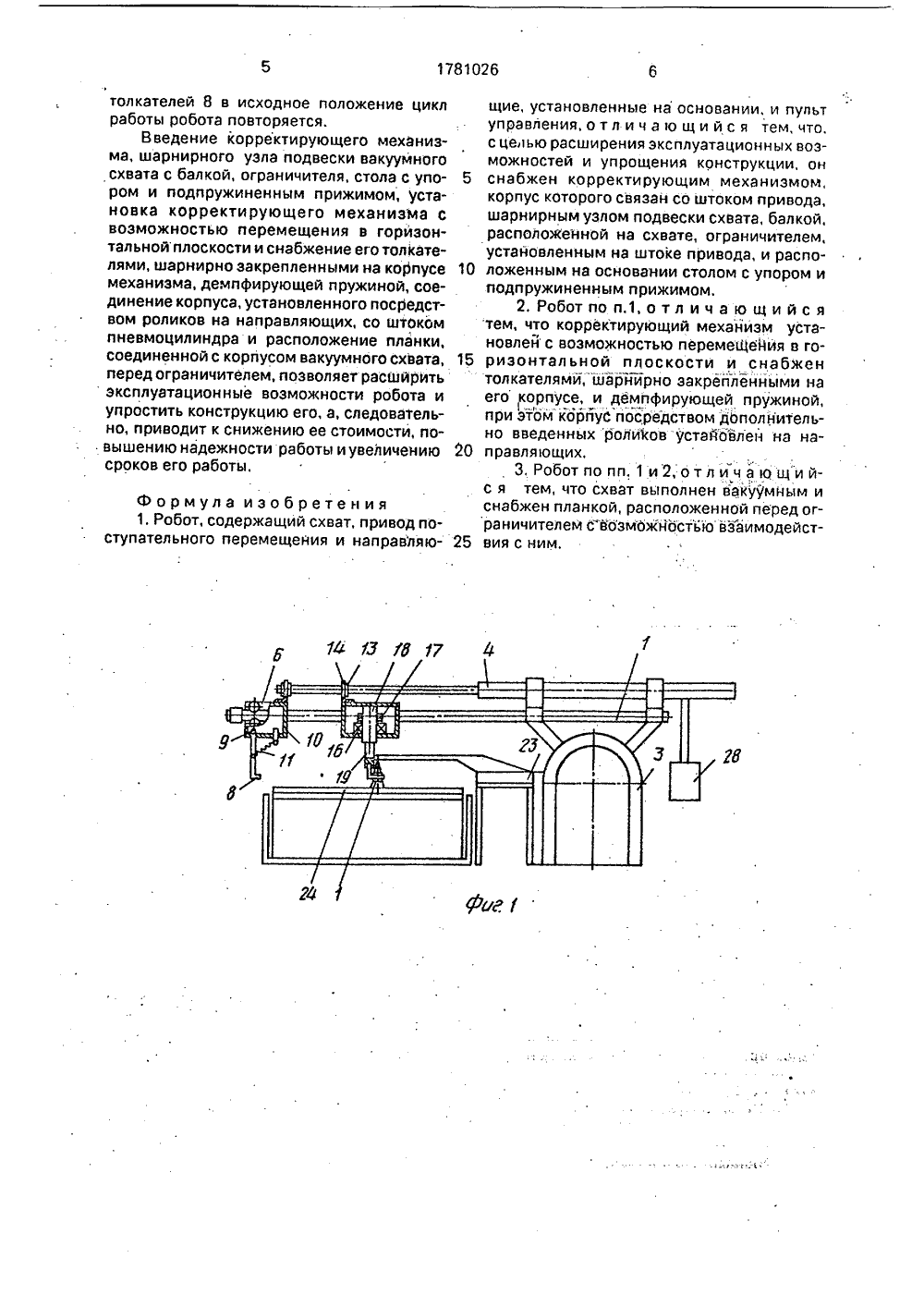
(51)5 В 2 ТЕНТНО ГОСУДАРСТВЕН ВЕДОМСТВО С (ГОСПАТЕНТ СС ОПИСАНИЕ ИЗОБРЕТЕНК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ ала, Устройство с механизмом, уст стью перемещен скости и имеющи закрепленные на демпфирующую и динен со штоком роликов установ Схват 16 выполн планкой 14, расп чителем 13 с воз вия с ним, 2 з.п. А.И,Агапеев и остроении,нипулятораового матери ой и направляющей тормозное уст кареткройство.Существенными недостатками известного устройства являются- невозможность подачи листового материала для резки с его предварительной ориентацией;- значительная сложность кинематической схемы;- большая стоимость устройства.Известен также робот, содержащий руки и каретку с установленными на ней корпусами рук, в котором с целью расширения функциональных возможйостей корпус каждой руки установлен на каретке с помощью двух пальцев, один из которых является осью вращения корпуса рук, а второй палец имеет расположенную в каретке эксцентричную относительно собственной оси вращения, размещенной в корпусе руки, часть,Недостатками известного робота ябля- тся сится к машиностроеатическим манипуляим подачу листового на полосы и форматки мера в полиграфичеи, а также для перев штамповочном подачи листового мавия гильотинных ножзобретение отно а именно к автом , осуществляющ иала для резки о .заданного раз промышленност ки заготовок водстве или для ла в зону дейст нию, торам матер строг ской клад прои териа ниц. ю-" невозможность осуществления " подачи листового материала для резки на по(57) Использование: в машичастности в автоматических мприменяемых для подачи лис Изведержащищения,четырехзв которомготовленсоставляся смонтинематичпоступаткоторой уник, выпкачения р стен перекладчик заготовок, сой привод поступательного перемесоединенный с рычажным венником, направляющую и балку, с целью снижения сложности изия в повышения износостойкости ющих перекладчик звеньев, имеетрованная на направляющей и киески связанная с приводом ельного перемещения каретка, на становлен рычажной четырехзвенолненный с ограниченным углом ычагов, а также встроенное между абжено корректирующим новленным с возможноя в горизонтальной плом толкатели 8, шарнирно корпусе 10 механизма, и ружину 11, Корпус 10 соепривода 4 и посредством ен нанаправляющиЪ 1. ен вакуумным и снабжен оложенной перед ограниможностью взаимодейстф-лы, 2 ил.51015 20 25 30 35 40 45 50 55 лосы или форматки с его предварительной ориентацией по отношению режущим ножам;- сложность наладки и отладки устройства;- устройство имеет сложную метэллоемкую конструкцию, а следовательно, значительную стоимость.Целью изобретения является упрощение конструкции устройства, расширение эксплуатационных возможностей его и повышение надежности фиксации заготовок. Все это приведет к повышению производительности устройства, снижению стоимости его.Это достигается тем, что в устройство, содержащее захват, привод поступательного перемещения, закрепленный на основании, выполненном в аиде пространственной сферы, и пульт управления, введены корректирующий механизм, рабочая каретка, в которой установлен вакуумный схват с возможностью вращения в горизонтальной плоскости,и поступательного перемещения в вертикальной плоскости за счет пневмоцилиндра, направляющйе, закрепленные на основании, ограничитель, установленный на штоке пневмоцилиндра поступательного перемещения, и стол с упором и подпружиненным прижимом, Механизм коррекции включает толкатели, шарнирно закрепленные.на корпусе механизма, демпфирующую пружину. Корпус посредством роликов установлен нэ направляющих и соединен с штоком привода поступательного перемещения механизма. Вакуумный схват состоит из корпуса, который посредством роликов сКольэит по направляющим. Снаружи кОрпуса установлена планка, которая расположена перед ограничителем, установленным на штоке. Внутри корпуса посредством подшипникового узла закреплен вертикальный пневмоцилиндр, на штоке которого установлена балка с пневмоприсосками. Подшипниковый узел установлен на салазках, которые перемещаются перпендикулярно направляющим. Перед основанием расположен стол,который необходим для направленного перемещения заготовок.На фиг.1 показан общий вид устройства; на фиг.2 - то же, вид сверху.Робот состоит иэ двух направляющих 1, соединенных тремя поперечинами 2, закрепленными на основании 3, выполненном в виде ферменной конструкции, Основание 3 при работе совместно со станком резки листового материала (не. показан) крепится снаружи станка. На основании 3 неподвижно закреплен пневматический привод 4 двухстороннего действия, шток 5 которого соединен с корректирующим механизмом 6, состоящим из стержня 7, на котором закреплены толкатели 8, шарнирно закрепленными посредством оси 9 на корпусе 10 механизма 6, и демпфирующих пружин 11. Корпус 10 посредством роликов 12 установлен на направляющих 1. На штоке 5 установлен ограничитель 13,. перед которым расположена планка 14. Она соединена с корпусом 15 вакуумного схвата 16. Корпус 15 посредством роликов 12 скользит по направляющим 1. Внутри корпуса 15 в подшипниковом узле 17 закреплен вертикальный пневматический цилиндр 18,на штоке 19 которого установлена балка 20 с присосками 21. Подшипниковый узел 17 установлен на салазках 22, на которых он перемещается перпендикулярно направляющим 1,К основанию 3 прикреплен стол 23, по которому скользят заготовки 24 листового материала. На столе 23 установлен упор 25 с наклонным выступом 26 и подпружиненный прижим 27. Наклонный выступ 26 и прижим 27 контактируют с балкой 20 приперемещении. корпуса 15, Управление работой робота производится с пульта управления 28. Работа устройства заключается в следующем.Собирается робот в комплексе со станком (не показан), осуществляющим .резку (например, картона). Стол 23 располагается в месте подачи заготовок 24 в станок. По команде с пульта управления 28 срабатывает вакуумный схват 16. Он при помощи присосок 21 захватывает лист (например, картона), Пневматический цилиндр 18 посредством штока 19 приподнимает его до высоты расположения толкателей 8 корректирующего механизма 6. Включается пневматический привод 4, Шток 5 перемещает толкатели 8. Они перемещают заготовку 24 до режущей части станка, При движении заготовка 24 дополнительно ориентируется упором 25 и подпружиненным прижимом 27. Пневмоприсоски 21 отключаются перед касанием листов режущей части станка, После разделки заготовки 24 шток 5 перемещает толкатели 8 в исходное положение. При этом ограничитель 13 захватывает планку 14 и передвигает вакуумный схват 16.При движении ограничителя 13 планка 14 перемещается и балка 20 посредством наклонного выступа 26 и подпружиненного прижима 27, вакуумного схвата 16 ориентируется и занимает исходное положение автоматически. После возвращения1781026 1 толкателей 8 в исходное положение цикл работы робота повторяется.Введение корректирующего механизма, шарнирного узла подвески вакуумного схвата с балкой, ограничителя, стола с упо ром и подпружиненным прижимом, установка корректирующего механизма с воэможностью перемещения в горизонтальной плоскости и снабжение его толкателями, шарнирно закрепленными на корпусе 10 механизма, демпфирующей пружиной, соединение корпуса, установленного посредством роликов на направляющих, со штОком пневмоцилиндра и расположение планки, соединенной с корпусом вакуумного схвата, 15 перед ограничителем, позволяет расшйрить эксплуатационные возможности робота и упростить конструкцию его, а, следовательно, приводит к снижению ее стоимости, повышению надежности работы и увеличению 20 сроков его работы. Формула изобретения 1. Робот, содержащий схват, привод поступательного перемещения и направляю щие, установленные на основании, и пульт управления,отл ича ю щи йс я тем, что, с целью расширения эксплуатационных возможностей и упрощения конструкции, он снабжен корректирующим механизмом, корпус которого связан со штоком привода, шарнирным узлом подвески схвата, балкой, расположенной на схвате, ограничителем, устайовленным на штоке привода, и расположенным на основании столом с упором и подпружиненным прижимом,2. Робот по п.1, о т л и ч а ю щ и й с я тем, что корректирующий механизм установлей с возможностью перемеЩения в горизонтальной плоскости и снабжен толкателямй; шарнирно закрепленными на его корпусе, и демпфирующей пружиной, при этом корйус посредством дОполнительно введенных роликов устайовлен на направляющих.3, Робот по пп. 1 и 2,: о т л и ч а ю щ"и йс я тем, что схват выполнен вакуумным и снабжен планкой, расположенной перед ограничителем с"возмбжностью взаимодействия с ним.1781026Составитель А,АстаховРедактор Техред М.Моргентал Корректор 3, Салка Заказ 4242 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, Ж, Раушская наб 4/5роизводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101
СмотретьЗаявка
4925234, 04.04.1991
А. Я. Астахов, И. М. Кленин, А. И. Агапеев и В. А. Гулин
АСТАХОВ АНАТОЛИЙ ЯКОВЛЕВИЧ, КЛЕНИН ИВАН МИХАЙЛОВИЧ, АГАПЕЕВ АЛЕКСАНДР ИВАНОВИЧ, ГУЛИН ВЯЧЕСЛАВ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: робот
Опубликовано: 15.12.1992
Код ссылки
<a href="https://patents.su/4-1781026-robot.html" target="_blank" rel="follow" title="База патентов СССР">Робот</a>
Способ подачи заготовок под схват робота и устройство для его осуществления

Номер патента: 1715555
Опубликовано: 28.02.1992
Авторы: Каган, Канер, Погромский, Прошляков, Славкин
МПК: B23Q 41/02
Метки: заготовок, подачи, робота, схват
...ее схват 4 берет заготовку и рука поворачивается в сторону станка 1. После обработки заготовки второй схват 4 робота 2 вынимает обработанную деталь из станка 1, головка руки нок 1. Заготовка обрабатывается, а рука, робота 2 поворачивается в позицию захвата, и схват 4 робота 2 устанавливает в прежнее гнездо обработанную деталь, После этого головка поворачивается, включается один из механизмов шагового перемещения и очередная заготовка устанавливается на позиции захвата.При этом по первой схеме подачи заготовок (фиг. 4 и 5) от системы управления последовательно срабатывает (а - 1) раз механизм 11 шагового перемещения каретки 6 и на позицию загрузки подаются заготовки первого ряда, параллельного оси центров станка 1. После этого...
Способ определения размеров и формы детали схватом робота и устройство для его осуществления

Номер патента: 1470499
Опубликовано: 07.04.1989
Авторы: Антонов, Новичихин, Павловец, Плюгачев, Размыслович
МПК: B25J 15/00
Метки: детали, размеров, робота, схватом, формы
...8 с источником сжатого воздуха (не показан), регулируемыми вентилями 9 - с атмосферой. В полостях стаканов установлены датчики 10 давления, так же соединенные с блоком управления. Деталь 11 зажимается мембранами 3 и 4.Схват работает следующим образом. В исходном состоянии перед взятием детали эластичные мембраны 3 и 4 не деформированы, источники 6 излучения выключены, вентили 8 закрыты, полости 5 через открытые вентили 9 соединены с атмосферой. После захвата детали 11 происходит деформирование мембран 3 и 4 в соот 2ветствии с формой детали 11. По сигналу с блока управления поочередно включаются и выключаются источники 6 излучения и производится регистрация при включении каждого из источников уровней освещенности приемников 7....
Схват робота

Номер патента: 1024271
Опубликовано: 23.06.1983
Авторы: Абсалямов, Куковинец, Кутузов
МПК: B25J 15/00
...на фиг, 1. 50Схват содержит корпус 1 с расположенными в нем валами 2 и 3, установленными в подшипниках 4 и соединенными между собой коническими шестернями 5 и 6 с передаточным числом 1=1. На валу 2 смонтированы зажимные губки 7, которые переме щаются приводом, включающим систему трубопроводов 8 для подвода сжатого воздуха, диафрагму 9 и пружину 10. 12На валу 3 установлена муфта предельного момента с левой полумуфтой 11, жестко закрепленной на валу 3, и с правой полу- муфтой 12, которая имеет возможность осевого перемещенйя относительно корпуса 1, а также с пружиной 13,В зажимных губках находится деталь 14. Механизм разворота зажимных губок в исходное положение содержит жестко смонтированный в корпусе пневмоцилиндр 15, на котором...
Схват робота

Номер патента: 1407799
Опубликовано: 07.07.1988
МПК: B25J 15/00
...пуансона,Целью изобретения является расширение технологических возможностей схвата робота за счет геометрического замыкания захватываемого объекта.На чертеже изображена принципиальная схема схвата робота.Схват содержит неподвижный захват- ный элемент 1, имеющий, например, форму параллелепипеда, захватный эле мент 2, выполненный в виде жесткого ложемента под деталь и исполнительный механизм 3 манипулятора робота, например пневмогидроцилиндр.Захватный элемент 2 соединен с 30 подвижным элементом исполнительного механизма 3 манипулятора робота, например со штоком пневмогидроцилиндра. Неподвижный захватный элемент 1 жестко соединен с корпусом исполни" тельного механизма 3 манипулятора робота, например с корпусом пневмогидроцилиндра.Схват...
Схват робота

Номер патента: 1472255
Опубликовано: 15.04.1989
Авторы: Арутинов, Диасамидзе, Кацобашвили, Надарейшвили
МПК: B25J 15/00
...роликами 5 и цилиндрическими выступами б, на которых установлены упругие губки, выполненные в виде цилиндрических пружин 7. По оси корпуса 1 установлена направляющая 8 с неподвижным относительно направляющей упором 9 и подвижным упором 10, которые контактируют с роликами 5 ры" чагов 4. Направляющая 8 с неподвижным упором 9 и подвижный упор 10 связаны с приводом (не показан) их взаимного перемещения в продольном направлении.Схват робота работает следующим образом.В исходном положении упоры 9 и 10 находятся в крайних верхнем и нижнем положениях (на чертеже изображено основной линией), Схват робота вводится в отверстие объекта (не показан). С помощью привода осуществляется перемещение направляющей 8 супором 9 и упора 10 навстречу...
Предыдущий патент: Рука манипулятора с программным управлением
Следующий патент: Устройство для управления приводом робота
Случайный патент: Устройство для хранения и поштучной выдачи изделий