Стенд для испытаний системы управления судном по курсу на волнении
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1050967
Автор: Мордовченко

Текст
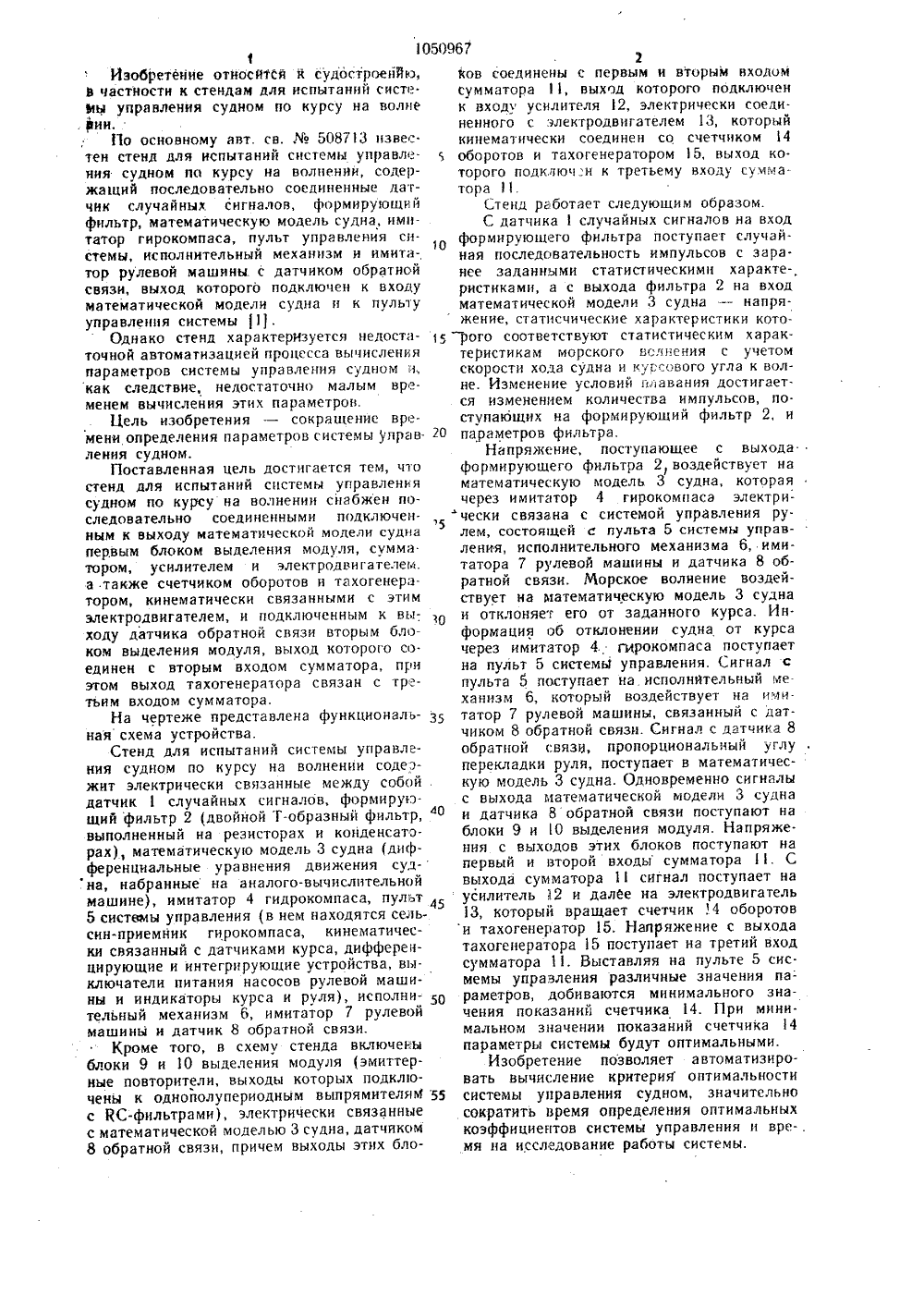
СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК В 63 Н 25/04; " 01 М 900 ПИСАНИЕ ИЗОБРЕТЕНИ ТЕПЬСТВ ВТОРСКОМ 61) 50873 (21) 3452362/27 (22) 1,06,82 (46) 30,10.83. Б (2) Д, Н. Мор л.40вченко 075(088.8) свидетельство СССР63 Н 25/04, б О М 9 ДЛЯ ИСПЫТАНИЕНИЯ СУДНОМНЕНИИ по авт.йся тем, что, с ц Р СИПО св.елью ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИ(53) 629,12:532.59 (56) . Авторское50873, кл, В 11,04.73 (прототип .(54) (57) СТЕНД СТЕМЫ УПРАВ КУРСУ НА ВОЛ 508713, отличающ,801050967 сокращения времени определения парамет. ров системы управления судном, он снабжен последовательно соединенными подключенным к выходу математической модели судна первым блоком выделения модуля, сумматором, усилителем н электродвигателем, а также счетчиком оборотов и тахо- генератором, кинематическн связанными с этим электродвигателем, и подключенным к выходу датчика обратной связи вторым блоком выделения модуля, выход которого соединен с вторым входом сумматора, при этом выход тахогенератора связан с третьим входом сумматора,1050967 10 Изобретение относйтся к судостроенйю,Ь частностн к стендам для испытаний систе.Мц управления судном по курсу на волне, сии.По основному авт. св.508713 известен стенд для нспытаннй системы управлення судном по курсу на волнения, содержащнй последовательно соединенные датчик случайных сигналов, формнрующв йфильтр, математическую модель судна, нмнтатор гирокомпаса, пульт управлення снстемц, исполнительный механизм н имнта.тор рулевой машннц с датчиком обратнойсвязи, выход которого подключен к входуматематической модели судна н к пультууправления системы 1.Однако стенд характеризуется недостаточной автоматизацией процесса вычнсленкяпараметров системы управления судном н,как следствие, недостаточно малым временем вцчнслення этих параметров,Цель изобретения - сокращение времени определення параметров системы управления судном.Поставленная цель достигается тем, чтостенд для испытаний системы управлениясудном по курсу на волнении снабжен последовательно соединенными подключенным к выходу математической модели суднапервым блоком выделения модуля, сумма.тором, усилителем и электродвигателем,а также счетчиком оборотов н тахогенера.тором, кннематическн связанными с этимэлектродвигателем, н подключенным к выходу датчика обратной связи вторым блоком выделения модуля, выход которого со.единен с вторым входом сумматора, прнэтом выход тахогенератора связан с третьим входом сумматора.На чертеже представлена функцнональная схема устройства,Стенд для испытаний системы управления судном по курсу на волнении содеэжнт электрически связанные между собойдатчик 1 случайных сигналов, формирую.щнй фильтр 2 (двойной Т-образный фильтр,выполненный на резисторах н конденсаторах), математическую модель 3 судна (дифференциальные уравнения движения суд-на, набранные на аналого-вычислительноймашине), имитатор 4 гндрокомпаса, пульт5 снствмы управления (в нем находятся сельснн-приемннк гирокомпаса, кинематически связанный с датчиками курса, днфференцнрующне н ннтегрирующне устройства, выключателя питания насосов рулевой машины н индикаторы курса н руля), исполнительный механизм 6, имитатор 7 рулевоймашины и датчик 8 обратной связи.Кроме того, в схему стенда включеныблоки 9 н О выделения модуля (эмиттерные повторители, выходы которых подключены к однойолупериодным выпрямнтеляМс КС-фнльтрамн), электрически связанныес математической моделью 3 судна, датчиком8 обратной связи, причем выходы этих бло 2йов соединены с первым н вторым входом сумматора 11, выход которого подключен к входу усилителя 12, электрически соеднне нного с электродвигателем 13, который кинематнческн соединен со счетчиком 14 оборотов н тахогенератором 15, выход которого подключ н к третьему входу сумма тора 1.Стенд работает следующим образом.С датчика 1 случайных сигналов на вход формирующего фильтра поступает случайная последовательность импульсов с заранее заданными статистическими характе-, рнстнками, а с выхода фильтра 2 на вход математической модели 3 судна - - напряжение, статисчические характеристики кото 15 рого соответствуют статистическим характернстикам морского волнения с учетом скорости хода судна и курсового угла к волне. Изменение условий юавання достигается изменением количества импульсов, по.ступающих на формнруюшнй фильтр 2, н 20 параметров фильтра,Напряжение, поступающее с выходаформирующего фильтра 2, воздействует на математическую модель 3 судна, которая через имитатор 4 гнрокомнаса электрически связана с системой управления рулем, состоящей с пульта 5 системы управления, исполнительного механизма 6, нмнтатора 7 рулевой машины и датчика 8 обратной связи. Морское волнение воздействует на математнческую модель 3 судна н отклоняет его от заданного курса. Информация об отклонении судна от курса через имитатор 4. Гирокомпаса поступает на пульт 5 снстемь 1 управлення. Сигнал с пульта 5 поступает на нсполннтельный ме.ханизм 6, который воздействует на нмн. З 5 татор 7 рулевой машины, связанный с датчиком 8 обратной связи. Снгнал с датчика 8 обратной связн, пропорциональный углу перекладки руля, поступает в математическую модель 3 судна, Одновременно сигналы с выхода математической модели 3 судна н датчика В обратной связи поступают на блоки 9 н 10 выделения модуля. Напряжения с выходов этих блоков поступают на первый н второй входы сумматора 11. С выхода сумматора 11 сигнал поступает на усилитель 12 н далее на электродвигатель 13, который вращает счетчик 4 оборотов н тахогенератор 15. Напряженне с выхода тахогенератора 15 поступает на третий вход сумматора 11, Выставляя на пульте 5 сисмемы управлення различные значения па- раметровдобнваются минимального значения показаний счетчика 14. Прн минимальном значении показаний счетчика 14 параметры системы будут оптимальными.Изобретение позволяет автоматнзнровать вычисление критерия оптимальности 55 системы управлення судном, значительно сократить время определения оптнмальныхкоэффициентов снстемц управления н вре-,мя на исследование работы системы,
СмотретьЗаявка
3452362, 11.06.1982
ПРЕДПРИЯТИЕ ПЯ Г-4152
МОРДОВЧЕНКО ДМИТРИЙ НИКОЛАЕВИЧ
МПК / Метки
МПК: B63H 25/04
Метки: волнении, испытаний, курсу, системы, стенд, судном
Опубликовано: 30.10.1983
Код ссылки
<a href="https://patents.su/2-1050967-stend-dlya-ispytanijj-sistemy-upravleniya-sudnom-po-kursu-na-volnenii.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытаний системы управления судном по курсу на волнении</a>
Устройство для контроля системы телемеханики с решающей обратной связью

Номер патента: 690533
Опубликовано: 05.10.1979
Авторы: Кочешов, Сергеев, Чуриков
МПК: G08C 25/02
Метки: обратной, решающей, связью, системы, телемеханики
...стороны и информаци с выхода передающей стороны поступает навходы сумматоров 16 и 18 помодулю два и на.вход приемной стороны.Одновременно наличие сигнала Ошибка анализируется блоком 26 анализа и55вырабатывается сигнал, по которомублок 24 управления снимает блокировкуэлементов И 14 и 15.Если после передачи искаженной проверочной комбинации на блок 26 анализа 3 69го и четвертого элементов И йолкпюч- ны к блокам сигнализации, выход счетчика блокировки приемной стороны под"-ключен к второму входу второго линейного блока, к блоку переключения передающей стороны и и вторым входам элементов И узла анализа и сигнализации,Недостатком этого устройства является то, что при неисправности приемной стороны может возникнуть ошибкавторого рода, когда...
Устройство для контроля системы передачи данных с обратной связью

Номер патента: 708393
Опубликовано: 05.01.1980
МПК: G08C 25/02
Метки: данных, обратной, передачи, связью, системы
...1 подается сигнал пуска автоматического сеанса сВязи, ПО этому сигналу датчик 1 формирует сообщение или служебную команду, состоящую из служебной информации спутника и информации адресата, и передает его в анализатбр 18. Анализатор 18 осуществляет анализ спутниковой части информации, Выделяет команду, содержащуюся в ней, и перецает ее на регистр 22Эта команда отображается блоком сигнализации 22, Регистр 21 управляет, кроме того, работой датчика ответных последовательностей 23 и датчика информации адресата 24. По концу информации спутника анализатор 18 осуществляет запуск датчика. информации адресата 24, при этом работа анализатора 18 и датчика 24 синхронизируется первым блоком фазиронания 19, Сумматор 14 осуществляет сложение сигналов,...
Устройство для защиты от ошибок в системе передачи с решающей обратной связью

Номер патента: 728153
Опубликовано: 15.04.1980
Автор: Сулимов
МПК: G08C 25/02
Метки: защиты, обратной, ошибок, передачи, решающей, связью, системе
...аформируются из символов последовательности Б,в, В,с ,Г; символыв - иэ последовательности В,с(,Га,Д; символы с - иэ последовательности Г, а 2,Д в ,Е.Таким образом,проверочные символы, формируемые вданный момент времени каким-либокодирующим блоком, зависят. от сформированных ранее другими кодирующими блокамИ проверочных символов ивлияют на формирование последующихпроверочных символов,Для повышения помехоэащищенностиустройства формирование проверочныхсимволов в кодирующих блоках должнопроизводиться по различным законам,наприйер, для циклических кодовпутем деления последовательностейсимнолов, поступающих на вход кодирующих блоков, на различные образующие многочлены одинаковой степени, взаимно простые друг дРугу.В приемной части устройства...
Система автоматического управления судном

Номер патента: 948772
Опубликовано: 07.08.1982
Автор: Завирухо
МПК: B63H 25/04
Метки: судном
...углам поворота рулей направления соответственно передающего и принимающего судов, Сумматор б формирует электрический сигнал, пропорциональный алгебраической сумме указанных сигналов, который подается на вход блока 7, где усиливается по напряжению и по мощности и отрабатывается исполниельным механизмом 8, которыи и обе. спещшает перекладку руля 27 направления судна 28 в соответствии с сигналом управления,Устройство определения поперечного смещения центра управления принимающего судна от заданной траектории работает следующим образом.948772 5 40 С выходов датчиком 18 и 19 снимаютсяэлектрические сигналы О, и О, пропорцио фнальные соответственно курсовым углам 4 иЧ 2 передающего и принимающего судовО КЧ 402 К 2 1 Т5где К К 2 -...
Устройство для контроля системы телемеханики с решающей обратной связью

Номер патента: 591903
Опубликовано: 05.02.1978
Авторы: Кочешков, Сергеев, Чуриков
МПК: G08C 25/02
Метки: обратной, решающей, связью, системы, телемеханики
...на элементах И 12-15, первом сумматоре 16 по модулю два, первом кодопреобразователе 17, втором сумматоре 18 по модулю два, втором кодопреобразователе 19, элементе задержки 20, 40 блоках сигнализации 21,22,и каналы связи 23, 24.Элемент задержки 20 .обеспечивает задержку сигналов информации, необходимых для обработки информации на 45 приемной стороне устройства.;устройство работает. следующим об разом.Прн обнаружении"ошибки информаций сигналом со счетчика 10 блокировки 50 блок переключения 2 переводится в положение, в котором выход накопителя- повторителя 3 подключается через блок переключения 2, кодопреобразователь 4 и второй линеййый блок 5 к каналу, связи. Сигналом со счетчика 10 открывй ется также элемент И 13, вследствие чего...
Предыдущий патент: Система охлаждения подшипников гребного вала судна забортной водой
Следующий патент: Гидравлический привод судовой рулевой машины
Случайный патент: Быстроразъемный замок для отсоединения свободных концов подвесной системы парашюта