Патенты с меткой «микроманипулятор»
Микроманипулятор

Номер патента: 867645
Опубликовано: 30.09.1981
Авторы: Бараускас, Рагульскис, Шаткус, Штацас
МПК: B25J 7/00
Метки: микроманипулятор
...всех пластинок 4 соединены;срез коммутатор 5 с блоком постоянного напряжения 6, а к управляющему входу коммутатора подключен блок управления 7, губки 8 и 9 прикреплены к подвижным концам рычагов 2 и 3.Манипулятор работает следующим образом.При включении блока постоянного напряжения 6, напряжение подается на контакты коммутатора, 5, к которым по сигналу блока управления 7 подключаются электроды одной, двух или при необходимости всех пьезокерамических пластинок 4. При867645 хинаКорректор Н. СтенПодписноеета СССРкрытийнаб., д: 4/5л. Проектная, 4 Составитель Т. ЮТехред А. БойкасТираж 1093дарственногоизобретенийЖ - 35, Раунт, г. Ужгор дактор Е, Паппказ 8184/16ВНИИПИ Госпо делам113035, МоскваФилиал ППП Пат коми и ошская од,подаче...
Микроманипулятор

Номер патента: 880712
Опубликовано: 15.11.1981
Авторы: Беднов, Рагулин, Ромащенко, Толстяк
МПК: B25J 7/00
Метки: микроманипулятор
...обусловленных тем, что шаг перемещения микроэлектрода осуществляется храповым механизмом и червячной передачей, с помощью которых невозможно достичь точности перемещения микроэлектрода на величину менее шага.Цель изобретения - расширение технологических возможностей микроманипулятора.Цель изобретения достигается тем, что микроманипулятор снабжен втулкой, жестко установленной на микроэлектроде, индукторами, сердечники которых смонтированы между держателем и втулкой, и стержнями, причем держатель и стержень выполнены из материала с различными коэффициентами линейного расширения.Составитель Т. Костикова Редактор Н. Воловик Техред А. Бойкас Корректор Ю. Макаренко Закво 0820/22 Тираж 093 Подписное ВНИИПИ Государственного комитета...
Микроманипулятор

Номер патента: 901974
Опубликовано: 30.01.1982
Автор: Коледа
МПК: G02B 21/32
Метки: микроманипулятор
...также снабженнь 1 х регулировочными винтами 9, держатель 1 связан с водилом 10.Соосно оси 11, проходящей черезнаходящееся в исходном положении рабочее острие 3 инструмента 2, поддержателем 1 на объектовом столике,12 находится подлежащий микрооперацииусловно изображенный объект 13. Наддержателеи 1 нв штативе 14 расположен микроскоп 15, Устройства вертикального перемещения штатива 14 и столика 12 на чертеже не показаны.В качестве упругих тел 4 и 8 могутбыть использованы не только металлические пружины, но также и тяги изподходящего эластичного материала,например из резины, а регулировочныевинты 5 и 9, с целью увеличения диапазона их действия, могут представ,лять собой, например, дифференциаль"ные или иные общеизвестные регулировочные...
Микроманипулятор

Номер патента: 905056
Опубликовано: 15.02.1982
МПК: B25J 7/00
Метки: микроманипулятор
...2, 12 и 18, горизонтальных подач 6 и 14 тонкие концы микроэлектродов вводят в зрительное поле микроскопа и фиксируют в нем стопорными ручками 4, 13 и 19. Направление оси тонкой части бокового микро- электрода устанавливают поворотом штока ф 0 21 и фиксируют стопорной ручкой 22, Сведение микроэлектродов в горизонтальной плоскости осуществляют с помощью по.дачи 14. Для сведения микроэлектродов в вертикальной плоскости микроманипулятор 4 з поворачивают вокруг продольной оси центрального микроэлектрода, для чего отпускают ручку 9 поворота и крепления, поворачивают устройство в направляющей втулке 5 и фиксируют в новом положении ручкой 9.Сближение микроэлектродов на нужное рас- э 0 стояние осуществляют вертикальной подачей 16. Расстояние...
Микроманипулятор

Номер патента: 933449
Опубликовано: 07.06.1982
Авторы: Амбразявичус, Курило, Милукене, Рагульскис, Шаткус
МПК: B25J 7/00
Метки: микроманипулятор
...8, в котновлен держатель 9. Аналогичным держателем 9 снабжена и вторая верхняя каретка 3. Между держателями 9 помещена исследуемая сфера 10. Верхние каретки 3 координатных приводов 2 соединены с пантографом 11, включающим ось 12 шарнира, закрепленную на основании 1, рычаги 13,14 и подвижные оси 15 шарниров 16, сопряженные с верхними каретками 3.Работает микроманипулятор следую 10 щим образом.При подключении преобразователей 6 или 7 к источнику многофаэного высокочастотного напряжения в пьезокерамических преобразователях 6 и 7 возбуждаются продольные и поперечные колебания, сдвинутые по фазе, создающие движущую силу в зоне механического контакта преобразователей 6 с каретками 4, перемещающую каретки 4 в направлении У и движущую силу...
Микроманипулятор

Номер патента: 949255
Опубликовано: 07.08.1982
Авторы: Беззубов, Карпушин, Цуканов, Яковлев
МПК: F16H 21/10
Метки: микроманипулятор
...конструктивно выполнен таким образом, что в исходном положении линия контакта ножевой опоры 19, ось 24 качания, ось среднего диаметра контактируемого световода 5 и ось 21 качания лежат во взаимнопараллельных плоскостях, а точка О, образованная пересечением торца и оси призмы 3, совпадает с осью пересечения гибких плеч 14 и 15, которая и является осью поворота предметного столика 2. Все это обеспечивает минимальную погрешность по перпендикулярности торца световода по отношению к лучу источника света в процессе юстировки,Микроманипулятор работает следующим образом.Луч источника 6 света предварительно выставляют вдоль оси призмы 3 в вертикальной плоскости и на высоту Н от плиты 22 в горизонтальной плоскости, после чего его фиксируют в...
Микроманипулятор

Номер патента: 959753
Опубликовано: 23.09.1982
Авторы: Галинский, Харламов, Шевко
МПК: A61B 5/04
Метки: микроманипулятор
...прикрепленнуюна кронштейне 10 к корпусу 5 при помощи винтов . На этом же кронштейнекрепится полевой транзистор 11, служащий для усиления биопотенциалов,снимаемых с микроэлектрода 8.Верхний корпус 5 смонтирован свозможностью свободного перемещенияштоков по оси в нижнем корпусе 6,представляющем собой трубку, котораятелескопически входит во внутрь соответствующей трубки нижнего корпуса6 и служит направляющей для микроэлектрода 8, ца нижнем корпусе 6смонтированы червячная переДача 1 ичервячное колесо с барабаном 2, хомут 12 для закрепления микроманипулятора на голове экспериментальногоживотного и нижние ролики 9, Корпуса5 и 6 связаны между собой гибкойнитью 13 (фиг. 3), пропущенной через ролики 9, которые расположенысимметрично относительно...
Микроманипулятор

Номер патента: 960004
Опубликовано: 23.09.1982
Авторы: Курило, Милукене, Рагульскис, Шаткус
МПК: B25J 7/00
Метки: микроманипулятор
...изобретения - повышение точносгт и упрощение конструкции микроманипуя цель достигается тем, что ляторе для биологических одержащем корпус и держа- нный на направляющих и шаговым приводом, шаговый н в виде пьезокерамическосодержащего пьезокерами, установленные под углом ричем одни концы стержней усом, а другие жестко скрепой и прижаты к боковой поателя.ьЕ-ЬйзЛя3ЯД , Анфнасафекус.,,ФКИ 1Манипулятор работает следующим образом.При подключении высокочастотного напряжения к электродам пьезокерамического элемента 5 он начинает колебаться в продольном направлении, совершает косые микроудары, создавая движущую силу в зоне механического контакта пьезокерамического элемента 5 держателем 3, которая сообщает держателю 3 поступательные...
Микроманипулятор для установки узлов механизма часов

Номер патента: 1083154
Опубликовано: 30.03.1984
МПК: G04D 3/04
Метки: механизма, микроманипулятор, узлов, установки, часов
...упор 27, ограничивающий верхнее положение шток-поршня 4. Нижнее положение шток-поршня 4 с захватывающей вакуумной трубкой 6 ограничивается упором 28, закреплен ным в корпусе 2.Система вакуумирования захвата включает в себя вакуумный насос с, тремя клапанами (не показаны), управляющими в требуемой последователь. ности созданием вакуума в захваты- вающем рычаге 12, вакуумной трубке 6 и в надштоковой полости корпуса 2.Работа вакуумного насоса и пневмоцилиндра 22 осуществляется от 50 общего привода, например, с электрон- но-путевым управлением (не показано).Микроманипулятор может быть использован при установке в иеханизм: 55 наручных часов узла баланса, включающего мост 9, спираль 29, обод 17баланса с осью 30. 54 4Микроманипулятор для...
Микроманипулятор для биоткани

Номер патента: 1093321
Опубликовано: 23.05.1984
Авторы: Бахтиозин, Джагупов, Ковригин, Шкимбова
МПК: A61B 5/05
Метки: биоткани, микроманипулятор
...возможности, определяемые возможностьюмикроинструмента производить тольювозвратно-поступательные прямолинейные движения,Цель изобретения - расширение функциональных возможностей.Поставленная цель достигается тем, что в микроманипуляторе для биоткани, содержащем биморфную пьезоэлектрическую мембрану, в центре которой укреплен пьезоэлектрический преобраэоватепь с расположенными вдоль него электродами, посредством. муфты связанный с микроинструментом, и регуляторы электрического напряжения, соединенные с пьезоэлектрической мембраной и пьезоэлектрическим преоб" разователем, пьезоэлектрический преобразователь выполнен в виде четырехзаходной спирали с продольной поляризацией, а электроды расположены нанаружной и внутренней поверхнос-....
Микроманипулятор
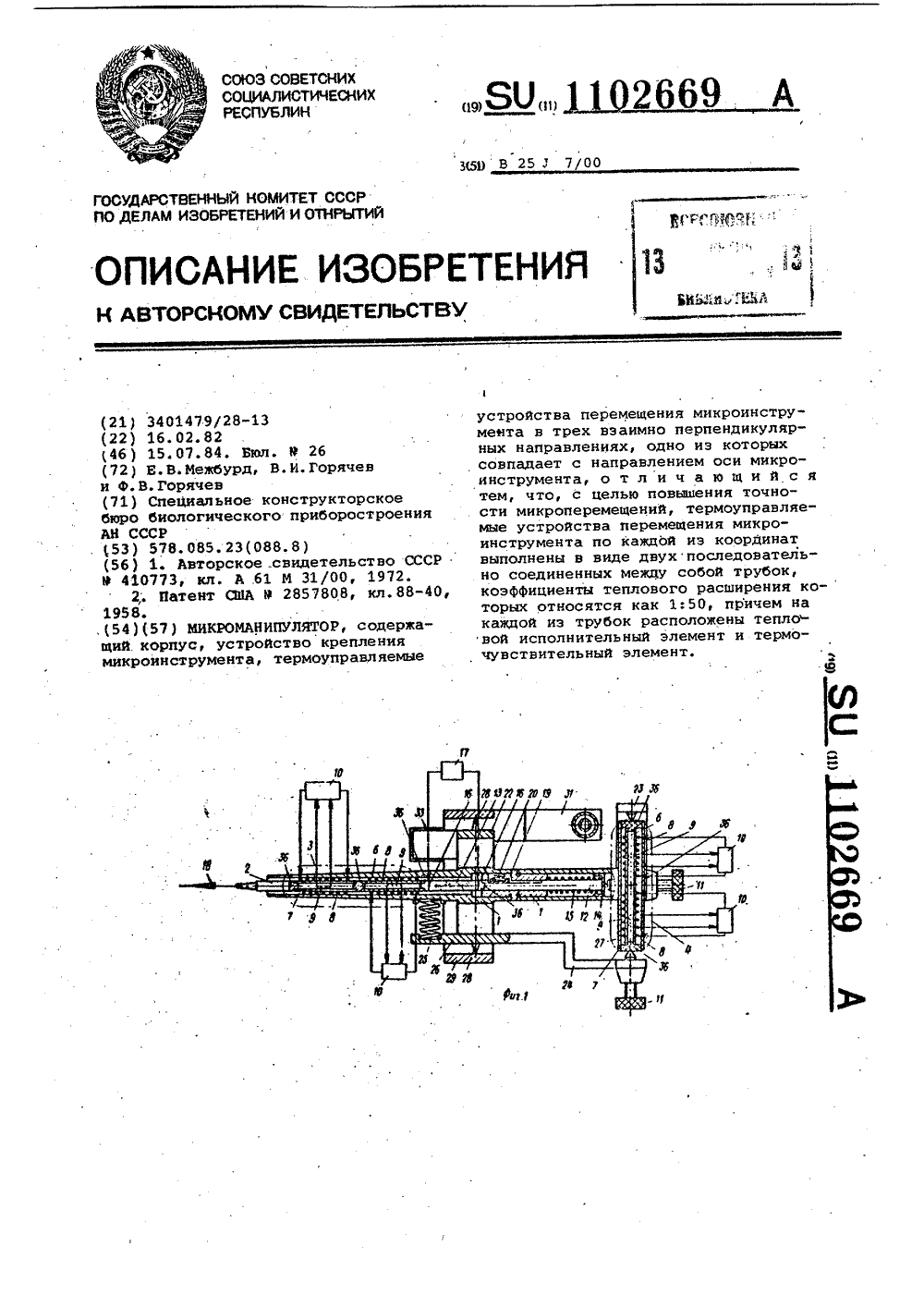
Номер патента: 1102669
Опубликовано: 15.07.1984
МПК: B25J 7/00
Метки: микроманипулятор
...5пружиной 20.Корпус 1 микроманипулятора с закрепленным в нем устройством 3 осевого перемещения через безлюфтовыешарниры 21 1 см. Фиг. 2 и 3) соединен 10с подвижной рамкой 22 см. Фиг. 1,2 и 3).Термоуправляемое устройство 4 вертикального перемещения установленомежду кронштейном 23, прикрепленнымнеподвижно к корпусу 1, и кронштейном 24, прикрепленным неподвижно крамке 22. Возвратная пружина 25 закреплена между планкой 2 Ь, прикрепленной к подвижной рамке 22, и корпусом 1.Жтройство 4 вертикального перемещения закрыто тепловыравнивающим экраном 27.Подвижная рамка 22 через безлюфтовые шарниры 28 см. Фиг. 1,3) соединена с неподвижной рамкой 29, 25Термоуправляемое устройство 5 горизонтального перемещения установлено между кронштейном 30,...
Микроманипулятор

Номер патента: 1161910
Опубликовано: 15.06.1985
МПК: G02B 21/32
Метки: микроманипулятор
...контролируется при помощимикроскопа, Правильным положениемсчитается такое положение, при котором прогиб Микроинструмента направлен вверх, После выбора правильногоположения микроинструмента корпус 1неподвижно фиксируется в каркасе 2прижимной гайкой 5 и конусной втулкой 7. Вращение гайки 5 обеспечиваетперемещение втулки 7 до упора в кор1161пус 1, тем самым обеспечивается фиксация корпуса 1 в каркасе 2. Усилие прижима и воспроиэводимость осевого смещения при фиксации обеспечивается ограничителем 6. Предварительное (на чальное) положение устройства осевого перемещения задается вращением каркаса 2 на шарнире 8. После чего каркас 2 неподвижно фиксируется на шарнире 8, например, стопорным вин том (не указан). Предварительное перемещение...
Микроманипулятор

Номер патента: 1202858
Опубликовано: 07.01.1986
Авторы: Габриелян, Кочикян, Овакимян, Рагульскис, Саркисян
МПК: B25J 7/00
Метки: микроманипулятор
...этом выходное звено линейно перемещается вдоль оси я, При подаче напряжения на управляющие электроды 7-18 частей 3 и 4 (фиг. 3) линейные перемещения участей 3 и 4 вдоль оси г складываются, при этом линейные перемещения выходного звена 2 удваиваются (фиг. 5), При подаче напряжения на управляющие электроды 7-18 частей 3 и 4 (фиг. 2) угловые перемещения частей 3 и 4 складываются, в результате угловые перемещения выходного звена 2 удваиваются (фиг. б).В случаях отработки частями привода микроманипулятора линейных и угловых (фиг. 7), а также только линейных (фиг. б) перемещений выходного звена промежуточное звено, связывающее центральные части преобра" зователей, может быть установлено на дополнительных направляющих поступательного...
Микроманипулятор

Номер патента: 1219334
Опубликовано: 23.03.1986
Авторы: Бакашвили, Барабадзе, Мгебришвили, Панозишвили
МПК: B25J 7/00
Метки: микроманипулятор
...цепи привода и расшире. их возможностей за счет ого хода ползуна,и ползун связаны резьбоа привод храпового меха- виде пластины, связаннойНИ Заказ 119 глнал ППП "Патент", г. Ужгор Проек гная 1 12Изобретение относится к мцкроманипуляторам для экспериментальной биологии и может быть использовано для шагового погружения мпкроэлектродов в мозг обездвцжен,ного животного с целью изучения нейронной (внутриклеточной ц внеклеточпой) активное. тц.Цель изобретения - упрощение конструкции ц повышение точности позцционирова. ния путем сокрашения количества элементов в кицематической цспн привода и расширение технолопгескпх возможностей за счет обеспечения обратного хода полэуна.На фпг. 1 изображен мцкромапипулятор, общий вид; ца фцг, 2 - разрез Л-Л...
Микроманипулятор

Номер патента: 1229030
Опубликовано: 07.05.1986
Авторы: Ларин, Никитин, Хохлов
МПК: B25J 7/00
Метки: микроманипулятор
...возможности применения несимметричного микроицструмента за счет введения механизма поворота микроинструмецта.На чертеже изображен манипулятор общий вид, ОМикроманипулятор содержит корпуссъемный держатель 2 микроинструмента 3 со штуцером ц, механизм перемещения по трем взаимно перпендику-. лярным направлениям, раэмешенный в корпусе 1 (це показан), Микроманип 5- лятор содержит также механизм 5 поворота микроинструмента 3, .выполненный в виде торцовой магнитной муфты, состоящей из ведомого звена б, уста- И новленного на держателе 2 посредством опор 7 вращения и стакана 8, связанного резьбовым соединением с втулкой 9. Во втулке 9 установлен капилляр 10, связанный с полостью держате ля, и микроинструмент 3, Вецущее звено 11 торцовой...
Микроманипулятор для микрохирургии

Номер патента: 1238016
Опубликовано: 15.06.1986
Автор: Терещенко
МПК: G02B 21/32
Метки: микроманипулятор, микрохирургии
...стяжки 40 и изогнутые трубки гидромагиатралей 31и 32, а в сильфоне 34 между торца ми 37 и 38 с эксцентриситетом относительно оси - продольные стяжки 41,установленные в плоскости, перпендикулярной.плоскости стяжек 40, и изогнутая трубка гидромагистрали 32, О соединенная. с сильфоном 35 линейногоперемещения, на жестком торце 36 .которого размещен палец 42 с установленным на нем держателем 43 микроинструмента 44.25Микроманипулятор работает следующим образом.В держатель 43 устанавливают микро- инструмент 44. Его угловое перемещеЗр ние производят поворотом головки рукоятки 3 и связанного с ней микровинта 5, подвижная гайка б которого через гибкий тросик 7 перемещает поршень 25 гидроцилиндра 22, увеличиваяобъем жидкости в сильфоне...
Микроманипулятор

Номер патента: 1261789
Опубликовано: 07.10.1986
Авторы: Горячев, Межбурд, Никитин, Утешев
Метки: микроманипулятор
...При этом происходит скачкообразное перемещение инструмента 3 со скоростью, необходимой для прокола клеточной оболочки без значительных деформаций клетки. При скачкообразном перемещении инструмента 3 возникают поперечные колебания инструмента из-за консольного крепления инструмента 3. Эти колебания гасятся жидкостный демпфером 7. Для обеспечения поперечных колебаний инструмента 3 на пьезоэлектрические пластины 4 чодается переменное напряже-ние ультразвуковой частоты, которое возбуждают продольное колебание инструмента 3, При определенном соотношении между продольной частотой и частотой собственных поперечных колебаний инструмента 3 его форма становится динамически неустойчивой и возникают поперечные колебания (поперечные колебания...
Микроманипулятор

Номер патента: 1283081
Опубликовано: 15.01.1987
Авторы: Рагульскис, Шержентас
МПК: B25J 7/00
Метки: микроманипулятор
...стабильности перемещения и повьппение долговечности микроманипулятора.На фиг. 1 представлен схематично предлагаемый микроманипулятор; н фиг. 2 - разрез А-А на фиг. 1.Микроманипулятор содержит корпус 1, в котором в направляющих 2, например шариковых, установлен держатель 3 с микроэлектродом 4 и шаговый привод, содержащий тонкие токопроводящие пластины 5 (например и пермалоя), одни концы которых жестко закреплены на корпусе 1, а другие 20 концы соединены гибкой диэлектрической пленкой. с односторонней металлизацией 7 (например алюминиевой), расположенной с зазором эквидистантно боковой поверхности держателя 3. Эквидистантно пластинам 5 установлены управляющие электроды 8, а держатель 3, имеющий форму четырехугольника (например...
Микроманипулятор

Номер патента: 1297798
Опубликовано: 23.03.1987
Авторы: Андрюшкявичюс, Рагульскис
Метки: микроманипулятор
...другой электрод 8, выполненный в виде металлического заостренного стержня.К изолирующей муфте 7 закреплен микро инструмент 9. Электроды 6 и 8 подключены к источнику 10 постоянного напряжения, при этом последовательно подключен микроамперметр1. Пьезопреобразователи 2 и 4 и пьезокерамическая мембрана 5 подключены к источнику напряжения (не ЗО показано).Микроманипулятор работает следующим образом.Подается напряжение на пьезопреобразователь 2, который, деформируясь, осуществляет грубое наведение микроинстру- З 5 мента 9. Величина деформации пьезопреобразователя 2 пропорциональна подаваемому напряжению.Путем подачи напряжения от источника0 постоянного напряжения создают раз 40 ность потенциалов между электродами 6 и 8, после чего от источника...
Микроманипулятор для сферических объектов

Номер патента: 1366385
Опубликовано: 15.01.1988
Авторы: Богатыренко, Кваша, Никитенко, Тырса
МПК: B25J 7/00
Метки: микроманипулятор, объектов, сферических
...на основании 1, при-. жимным устройством 7.Прижимное устройство 7 состоит из шариковых опор 25 и дисков 26, котоРые усилием пружин 27 подпружинивают 55 1 13663Изобретение относится к приборостроению и может быть использованодля высокоточного перемещения сферических объектов.Цель изобретения - повышение точ 5ности позиционирования за счет ликвидации люфтов в кинематической цепи.На фиг.1 схематически представленмикроманипулятор; на фиг.2 - то же,вид .сверху; на фиг,З - разрез А-А наФиг.2.Микроманипулятор состоит из основания 1, верхней 2 и нижней 3 платформы с ведущими 4 и ведомыми 5 частями (ползунами), связанными междусобой параллелограммным механизмом 6,прижимного устройства 7, держателей8 сферического объекта 9 и двухкоординатного...
Микроманипулятор

Номер патента: 1371907
Опубликовано: 07.02.1988
Авторы: Рагульскис, Статкявичюс, Шержентас
МПК: B25J 17/00
Метки: микроманипулятор
...сослинсны с источником цитации (цс показано).,Чи крм д ни пулятор рабтает сл еду юп(и м иразом.При плычс через коммутатор напри кения, ныпричер на нижнк)ю пару электродов 6, чсжлу ними возникает электростатическая си.ьд притяжения, пол действием которой при:ьм ы 3 перемещается вниз ( по плоскости чертежа), а рука 1 со сватом 2 переме(цается нв(рх гц оси 2. Для перемещения механической ркис здвдтч 2 вниз цо оси 2 цыпряжсцис счичдется с нижней пары элскгроло 6 и через комчутытор (не показан) )нлк,)кчас гся цы срцкк пару э,н к(ро.(о(нДля исмешения чсдцичсской рчкисо с(ьтол 2 по (си У цдцряжснис (цлключсгся и пр;)Ни или лсои пыре эг(сктро;(о11 ри э(оприил чожет работать в нсцрсрывцч и шдгоьчм р(жима. Длина ш;ь: и рсч)ц( ция призмы 3...
Пьезоэлектрический микроманипулятор для погружения электрода в биологическую ткань

Номер патента: 1377032
Опубликовано: 28.02.1988
Авторы: Джагупов, Панов, Рябцов
МПК: A61B 5/05
Метки: биологическую, микроманипулятор, погружения, пьезоэлектрический, ткань, электрода
...9 и детектор 10 соединен с одним из входов дифференциального усилителя 11. К второму входу этого усилителя подключен к источник 12 управляющего напряжения. Выход дифференциального усилителя 11 соединен с пьезоэлементом 4.Устройство работает следующим образом.Дополнительный пьезоэлемент 7 является изл учателем акустических колебаний с частотой гг, равной частоте напряжения источника 8 переменного напряжения. Для получения максимальной амплитуды колебаний дополнительного пьезоэлемента 7 частота выбирается равной частоте его механического резонанса. Пьезоэлемент 3 служит приемником акустических колебаний, распространяющихся в среде между пьезоэлементами 3 и 7.Амплитуда напряжения, снимаемого с пьезоэлемента 3, зависит от расстояния между...
Микроманипулятор

Номер патента: 1390013
Опубликовано: 23.04.1988
Авторы: Бондарев, Иванов, Попов, Хохлов
МПК: B25J 7/00
Метки: микроманипулятор
...орган, который устанавливается на стержне 8. Последний установлен на П-образных скобах 9, выполненных из плоских пружин, поверхности боковых сторон которых расположены перпендикулярно оси вала 5. Скобы 9 закреплены одними своими сторонами на кронштейне 10, жестко связанном с валом 5, а другими крайними сторонами - со стержнем 8. Мембранные коробки связаны с источником давления (не показан).30 Микроманипулятор работает следующим образом.При подаче давления, например, в мембранную коробку 2 поперечного перемещения исполнительного органа, которая при этом, воздействуя через тягу на вал 5, поворачивает его в шарнире 6 в горизонтальной плоскости. При этом два упругих стержня 4 тяги мембранной коробки 3 изгибаются и не препятствуют этому...
Микроманипулятор

Номер патента: 1404057
Опубликовано: 23.06.1988
Автор: Гринченко
МПК: A61B 5/04
Метки: микроманипулятор
...электростимулятора, подаваемых на привод, выполненный в виде микроэлектродвигателя.Устройство работает следующим образом.Микроэлектрод 2 вводят в держатель 1с уплотняющей нитью 14 и закрепляютфиксатором 13 в крайнем верхнем положении таким образом, что его регистрирующий кончик находится полностью внутридержателя 1. На нижний конец корпусанавинчивают наконечник 7 и всю конструкцию устанавливают во втулке 8фиксирующими винтами 12 под требуемымуглом наклона к поверхности черепа, агибкий вал 5 сцепляют с выходным валом редуктора 17.При подаче управляющих импульсов отэлектростимулятора с пульта управления намикроэлектродвигатель возникающее усилиепередается через редуктор 17, гибкий вал 5на шестерню 3, которая, вращаясь по резьбе...
Микроманипулятор

Номер патента: 1414623
Опубликовано: 07.08.1988
Авторы: Боков, Егоров, Поляков
МПК: B25J 7/00
Метки: микроманипулятор
...движении исполнительного органа,например, влево с помощью соответствующего промежуточного усилителя 11 через пневмораспределитель 10 в каналы 9 подается сжатый воздух и обойма 6 всплывает. Во время всплытия контроллер 12 опрашивает датчик 16 о наличии контакта между обоймой 6 и основанием 1. Как только этот контакт нарушается, от контроллера 12 поступает сигнал на один из пневмораспределителей 8, обеспечивающий подачу сжатого воздуха в канал 7, выход которого расположен слева от оси обоймы 6, последняя под действием этого давления перемещается влево.Контроллер 12 переходит к опросу датчика 13 контакта и при наличии контакта между обоймой 6 и корпусом 3 пре Формула изобретения Микроманипулятор, содержащий установленный на основании...
Микроманипулятор

Номер патента: 1450996
Опубликовано: 15.01.1989
Авторы: Гульбинскас, Любинас, Рагульскис
МПК: B25J 7/00
Метки: микроманипулятор
...5 соединеы между с бой электрически и подключены к соо ветс вующим выходам коммутатора 6 питания. Сдин торец привода 3 жестко нрикрепле К основанию 1, а к другому торцу жестко Прикреплен рабочий орган 2. Сплошные электродыы всех пластин также электрически соединены между собой и подключены к источнику питания (не показан). Расположеие пластин 4 в приводе может быть любым, о наиболее целесообразным является их азмещение сплошным электродом к сплошому, а разделенным - к разделенному,Микроманипулятор работает следующим Образом.Пусть на половину секторов 5 привода 3 ерез коммутатор 6 подается напряжение питания величиной +l, а на диаметрально противоположную половину - У (фиг. 2), 1; огда одна сторона каждого пьезоэлектрического ди:ка 4...
Микроманипулятор

Номер патента: 1458206
Опубликовано: 15.02.1989
Авторы: Бондарев, Иванов, Попов, Хохлов
МПК: B25J 7/00
Метки: микроманипулятор
...7. Лгл 8 )1 3 г в).-",.П 11 соотВетств;.ВО с;)абг)ими: ембрг.цны)л)л Короб)КБЬ 111 г ИВЕ) ТП.а Лг 1 ГЭГЬ) 1 Пс ГЕРЕНО 1 О ПЕРСМЕ 1 гЬЦЯ Ц г Рыла О,г Компенсаторы 10 давле)ця содержат гер)ле ъзирова 51 цье )тспо)цтель 1 ые ме;бранные коробки 1;"13 и кесткие скобы 1 г,-16 ацьг;ОГч нь)з рабочим коробкам ч, Гермет изк ) ова,пые мембран)гые коробки 11-13 у.тгяовглелы ПОСЛ ЕДОватРЛЬНС С г)абог 1 ЛМП 1 ЛЕб) ац - ЦЬ 1 ГИ КОГ)Обкамц .-6) СООТГ НЕТ ". ГЕЯ).0 г;.1 гпа С ТОПО НЯ ГЕ РМЕТН ЗИ) Ова ЛНХ ЛО" ПОЛци ГЕЛЬ 1 Ь)Х . Е)бр:1 НЬ:Х Кг)ребг К 1 вООраа)Е 1 "Эя П СОрс.г рг )г)Ч 1 г Г." гацнь)Х КОр (11 ОК гф "/ ЕоКО :а Кр Ег ЭЕ ца "а Осцовапи)л 17, а д;)уга): соединена жесткими скосамь 14-с соотве". - ствую 1:.1 ьцл .;,:бочи.г 51 ыемо:.Гць 5)и...
Микроманипулятор

Номер патента: 1511106
Опубликовано: 30.09.1989
Авторы: Мгебришвили, Панозишвили
МПК: B25J 7/00
Метки: микроманипулятор
...органа микроманипулятора.На фиг, 1 изображен микроманипулятор, разрез; на фиг. 2 - разрез А - А на фиг. 1.Микроманипулятор содержит расположенный в корпусе электромагнит 1 с планкой 2 (якорем), храповой механизм, состоящий из стеряня 3 с закрепленным на нем коромыслом 4 (храповой собачкой), к которому прикреплены две пары зубьев 5, пружины 6, храпового колеса 7, а также шарики 8, опору 9, исполнительный орган, состоящий из винта 10 и держателя 11 микроэлектродов, электромагнит 12 с планкой 3 (якорем) для автоматического изменения направления движения исполнительного органа.Микроманипулятор работает следующим образом.При включении электромагнита 1 планка 2 перемещает стержень 3 с закрепленным на нем коромыслом 4 и с помощью...
Микроманипулятор

Номер патента: 1541042
Опубликовано: 07.02.1990
Авторы: Гермашева, Курносиков, Ряднов
МПК: B25J 7/00
Метки: микроманипулятор
...и может быть исполь-зовано для прецизионных микроперемещений юстируемой детали в приборо 5строительной, электронной и другихотраслях техники.Цель изобретения - повышение точности перемещения исполнительногооргана за счет уменьшения шага перемещения винтовой передачи.На чертеже изображен микроманипу, лятор, общий вид, разрез,Микроманипулятор содержит шаговыйдвигатель 1, соединенный с корпусом2, направляющую вилку 3, кинематичес"ки связанную с дифференциальным винтом 4, Гайка 5 жестко соединена скорпусом 2, Ходовая гайка 6 и исполнительный орган 7 имеют возможностьперемещения в направляющих 8, зафик"сированных винтами 9. Исполнительныйорган 7 установлен между двумя упругими элементами 10 и 11, выполненными, например, в виде...
Микроманипулятор

Номер патента: 1743846
Опубликовано: 30.06.1992
Авторы: Алексеев, Попов, Тюрин
МПК: B25J 7/00
Метки: микроманипулятор
...его прерывистое вращение с шагом в 360: и временем остановки, необходимым для выполнения технологической операции. При каждом1743846 А(54) МИКРОМАНИПУЛЯТОР (57) Существо изобретения: шаг мещение схвата 7 происходит и щении ролика 8, взаимодейст фольгой 4, намотанной на бараб рый, в свою очередь, вращаетс двигателем 1, 2 з,п. ф-лы, 2 ил. обороте барабана 2 его радиус в точке соприкосновения с контактным роликом 8 увеличивается на толщину наматываемой фольги, что приводит к перемещению схвата точно на эту же величину, Количество слоев намотки фольги на барабан 2 соответ- (у) ствует числу точек позиционирования. Упругие элементы подвески обеспечивают как точное ориентирование схвата 7, так и замкнутость системы подачи. После завершения...