Способ измерения положения объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
(19) 21/О 59 4 САНИЕ ИЗОБРЕТЕН Мф 40онструктоИнститутаСРЮ,Н,Бакл ко-тех- ехничес детельство СССР 1 В 21/00, 1984 54) КТА 57) зобре й тех/ Цф 1-1 огиба ната п рмулой ль 1 1=1эначе де Ц; - дискре ей видеосигнал ожения объекта изме елью К - коордвыраженнаяработки; Иботки, вырав обработкиобработки в о т колиичен ит естве тактов о ость цикла обр оличестве такт ичество тактов увеличе путем в енная в с окретного линейно-м 1 с - когибаю л. ия ычи ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ А ВТОРСКОМЪ/ СВИДЕТЕЛЬСТВ(71) Специальноенологическое бюрокой механики АН У(56) Авторское св11 1067352, кл. С ПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОБЪение относится к измериике и может быть примене енин перемещений объекэобретения является увеости измерения за счет информативности способаановления огибающей дисдеосигнала, полученного сричного фотоприемника, икоординаты энергетическог центра огибающей, дискретиэированной с частотой большей частоты дискретизации первичного видеосигнала. Устройство, реализующее способ, содержит источник 1 света, диафрагму 2, блок 3 формирования изображения диафрагмы, линейно-матричный фотоприемник 4, блок 5 управления фотоприемником, бло 6 выборки, блок 7 восстановления огибающей видеосигнала, аналого-цифровой преобразователь 8, генератор 9, блок 10 вычисления координаты, регистратор 11. Вычисление координаты осуществляется в блоке 10 в соответствииСИзобретение относится к измерительной технике и может быть применено при измерении перемещений объектов.5Цель изобретения - увеличение точности измерения эа счет увеличения информативности способа путем восстановления огибающей дискретного видеосигнала, полученного с линейно-матричного фотоприемника, и вычисления координаты энергетического центра огибающей, дискретизированной с частотой большей частоты дискретизации первичного видеосигнала. 15На чертеже представлена схема устройства, реализующего предлагаемый способ.Устройство содержит оптически связанные источник 1 света, диафрагму 2, 20 блок 3 формирования изображения диафрагмы и линейно-матричный фотоприемник 4, блок 5 управления фотоприемником, первый выход Которого соединен с управляющим входом фотоприемника, 25 а второй выход - с управляющим входом блока 6 выборки, информационный вход котордго соединен с выходом фотоприемника 4, а выход - с входом блока 7 восстановления огибающей, последова- З 0 тельно соединенного с аналого-цифровым преобразователем 8, генератор 9, синхронизирующий вход которого соединен с третьим выходом блока 5 управления фотоприемником, а выход - с тактовым входом блока 10 вычисления координаты, информационный вход которого соединен с выходом аналого-цифрового преобразователя 8, а вход начальной установки - с третьим выходом 40 блока 5 управления фотоприемником, информационный выход блока 1 О соединен с информационным входом регистратора 11, вход записи которого соединен с управляющим выходом блока 10 вычисления координаты. Блок 10 вычисления координаты содержит первый сумматор 10.1, второй сумматор 10.2, блок 10.3 деления, блок 10.4 вычитания, дискриминатор 10,5, блок 10,6 управления сумматорами, блок 10,7 управления счетчиком, счетчик 10.8, первый элемент 10.9 задержки, второй элемент 10.10 задержки, формирователь 10.11. Способ измерения положе 55 ния объекта заключается в том, что формируют оптический сигнал, пространственно связанный с положением объекта, преобразуют его с помощью линейно-матричного фотоприемника В дискретный видеосигнал с периодом дискретизации Т восстанавливают огибающую дискретного видеосигнала, дискретиэируют огибающую с периодом дискретизации Т, с Т преобразуют дискретные значения Ц огибающей в двоичный код, измеряют с дискретом Т временной интервал И, начало которого совпадает с началом опроса фотоприемника, а конец - с последним импульсом дискретного видеосигнала, вычисляют координату К энергетического центра огибающей относительно начала временного интервала М в соответствии с формулой к 1К=МЦ;где Е - количество импульсов дискре-:тизации огибающей.Устройство, реализующее способ, работает следующим образом.Источник 1 света освещает диафрагму 2, изображение которой, отраженное от объекта 12, переносится блоком 3 формирования иэображения диафрагмы с помощью светоделительного элемента 1 и объектива 2 на поверхность фотоприемника 4. При изменении положения объекта происходит перемещение иэображения диафрагмы 2 на поверхности фотоприемника 4, В начале цикла опроса фотоприемника 4 блок 5 управления фотоприемником формирует сигнал сброса, который с третьего выхода блока 5 управления фотоприемником поступает на входы сброса первого 10.1 и второго 10.2 накапливающих сумматоров блока 10 вычисления координаты, на входы начальной установки счетчика 10.8 и блока 10.7 управления счетчиком и на синхронизирующий вход генератора 9. При этом первый 10.1 и второй 10.2 накапливающие сумматоры обнуляются, в счетчик 10.8 записывается единица, генератор 9 синхрониэируется и вырабатывает импульсы, период которых меньше периода опроса фотоприемника. Эти импульсы поступают на тактовые входы блока 10.6 управления сумматором и блока 10.7 управления счетчиком. Блок 10.7 управления счетчиком разрешает прохождение импульсов, поступающих на его тактовый вход, на счетный вход счетчика 10,8Блок 5 управления фотоприемником периодически опрашивает фотоприемник4 на выходе которого формируются видеосигналы, огибающая которых пропорциональна распределению освещенностив иэображении диафрагмы 2,5Сигналы, снимаемые с фотоприемника 4, поступают на вход блока 6 выборки, осуществляющего синхронную выборку видеоимпульсов, снимаемых с фотоприемника. Частота выборки равна 10частоте опроса фотоприемника,Сигналы с выхода блока 6 выборкипоступают на вход блока 7 восстановления огибающей видеосигнала, с выхода которого видеосигнал поступает 15на вход аналого-цифрового преобразователя 8. С выходов аналого-цифровогопреобразователя 8 коды, соответствующие мгновенным значениям уровня видеосигнала, поступают на информационные 20входы первого накапливающего сумматора 10. 1 и дискриминатора 10.5. Припревышении мгновенного значения видеосигнала некоторого порога на выходедискриминатора 10.5 формируется перед ний фронт импульса. Величина порогасрабатывания дискриминатора устанавливается, исходя из априорной информации об уровне помех в устройстве,30Импульс с выхода дискриминатора 10.5 поступает на управляющий вход блока 10.6 управления сумматором и вход формирователя 10. 11. По переднему фронту этого импульса блок 10,635 управления сумматором разрешает прохождение импульсов, поступающих на его тактовый , вход с выхода генератора 9, на тактовый вход первого накапливающего сумматора 10,1 и на вход второго элемента 10.10 задержки, с выхода которого задержанные импульсы поступают на тактовый вход второго накапливающего сумматора 10.2. Элементы 10.9 и 10. 10 задержки служат45 для компенсации временных сдвигов в узлах устройства. На информационные входы первого накапливающего сумматора 10.1 подают 50 ся коды мгновенных значений уровня видеосигнала. В момент прихода импульса на тактовые входы накапливающие сумматоры прибавляют к ранее накопленным суммам коды, поступающие55 на их информационные входы, следовательно, после прихода и импульсов в первом и втором накапливающих сумматорах накопятся суммы, соответствен и Оно Б, и П , где Б - код1 1 1-.1мгновенного значения уровня видеоимпульса в момент прихода на тактовый вход первого накапливающего сумматора 1-го импульса. Если после прихода 1-го импульса мгновенное значение уровня видеосигнала становится меньше порога срабатывания, дискриминатор 10.5 формирует на выходе задний фронт импульса, блок 10,6 управления сумматором запрещает прохождение импульсов, поступающих на его тактовый вход, на тактовые входы накапливающих сумматоров, В первом и втором накапливающих сумматорах будут накоплеКны результаты, соответственно У Б 1К э 11иЬ . Код суммы, накопленнойз - .1первым накапливающим сумматором 10. 1, поступает на вход делителя блока 10.3 деления, а код суммы, накопленной вторым накапливающим сумматором 10.2, поступает на вход делимого блока 10.3 деления. При этом на выходе блока 10,3 деления формируется код част ного.По заднему фронту импульса, сформированного дискриминатором 10.5, формирователь 10.11 формирует импульс, поступающий на вход первого элемента 10,9 задержки и управляющий вход блока 10.7 управления счетчиком, который запрещает прохождение импульсов, поступающих на его тактовый вход, на счетный вход счетчика 10.8. Код, соответствующий числу импульсов, подсчитанных счетчиком 108, поступает на входы уменьшаемого блока 10.4 вычитания, на входы вычита которого поступают коды с выхода блока 10.3 деления. Код результата вычитания поступает на информационные входы регистратора 11, который его регистрирует по переднему фронту импульса, поступающего на его вход записи с выхода первого элемента задержки,За один цикл опроса фотоприемника 4 в регистраторе 11 будет зарегистрирован код результата, соответствующий координате энергетического центра огибающей кц;К=Ик Ф1348644 Формула изобретения Составитель В.СтанововТехред М.Ходанич Корректор Н.Король Редактор Н.Киштулинец Заказ 5178/39 Тираж 676 ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб д. 4/5Подписное Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 где К - код, зарегистрированный реГи-стратором;М - количество импульсов, накопленных счетчиком за цикл об 5работки,Способ измерения положения объекта,10 заключающийся в том, что формируют пространственно связанный с положением объекта оптический сигнал, преобразуют его с помощью линейно-матричного фотоприемника в дискретный видео.1 сигнал с периодом дискретизации Т о т л и ч а ю щ и й с я тем, что, с целью увеличения точности измерения, восстанавливают огибающую дискретного видеосигнала, осуществляют дискретизацию огибающей с периодом дискретизации ТТ преобразуют дискретные значения Ь огибающей в двоичный код, измеряют с дискретом Т временной интервал И, начало которого совпадает с началом опроса фотоприемника, а конец - с последним импульсом дискретного видеосигнала, а положение объекта определяют по координате К энергетического центра огибающей относительно начала временного интервала И, которую вычисляют по формулец;рП;где Е - количество импульсов дискретизации огибающей.
СмотретьЗаявка
3999448, 02.01.1986
СПЕЦИАЛЬНОЕ КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКОЕ БЮРО ИНСТИТУТА ТЕХНИЧЕСКОЙ МЕХАНИКИ АН УССР
ДАВИДЧУК АНДРЕЙ НИКОЛАЕВИЧ, БАКЛУШИН ЮРИЙ НИКОЛАЕВИЧ, СУХАНОВ АЛЕКСАНДР ИВАНОВИЧ
МПК / Метки
МПК: G01B 21/00
Опубликовано: 30.10.1987
Код ссылки
<a href="https://patents.su/4-1348644-sposob-izmereniya-polozheniya-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Способ измерения положения объекта</a>
Устройство для контроля и диагностики логических блоков

Номер патента: 1295401
Опубликовано: 07.03.1987
Авторы: Дерендяев, Кибзун, Лисицин, Лучкин, Обухов
МПК: G06F 11/26
Метки: блоков, диагностики, логических
...устройства, предназначенного для контроля блоков, содержащих два. вида структур, каждая из которых имеет два уровня логических сигналов; на фиг.5 - регистровый блок и его связи с коммутатором, сумматором и другими блокамивУстройство для контроля и диагностики логических блоков содержит блок 1 задания программа контроля, коммутатор 2, блок 3 сопряжения, блок 4 управления, блок 5 дешифрации команд, регистровый блок 6, сумматор 7, блок 8 памяти тестов, блок 9 памяти результата, блок 10 памяти входов-выходов, блок 11 компараторов, дешифратор 2, блок 13 коммутации, блок 14 задания опорных напряжений, блок 15 задания нагрузок, дешифратор 16 результата, блок 17 памяти маски, блок 18 памяти состояний, блок 19 памяти структуры, блок 20...
Способ синхронизации источников телевизионных сигналов

Номер патента: 748904
Опубликовано: 15.07.1980
Автор: Федоров
МПК: H04N 7/18
Метки: источников, сигналов, синхронизации, телевизионных
...первого селектора 5 синхроимпульсов. При этом вход первого селектора 5 синхроимпульсов подключают к выходу первого блока 4 формирования полного видеосигнала, на который подают синхроимпульсы с выхода первого синхрогенератора 3, вход внешней синхронизации которого соединяют с выхо- доМ первого высокостабильного генератора 2,Выход первого цифрового измерителя 6 интервалов времени соелицяют однократно или периодически с соответствующим входом делителя 11 частоты, что приводит к автоматическому смещению момента вы. хода сигналов делителя 11 частоты на величину, соответствующую интервалу времени, полученному по значению кода сигнала ошибки.Выход кода второго цифрового измерителя интервалов времени соединяют с входом преобразователя 13...
Преобразователь частота-код для управляющих цвм
Номер патента: 503358
Опубликовано: 15.02.1976
Авторы: Власенко, Евстигнеев, Исаченков, Рачков
МПК: H03K 13/00
Метки: управляющих, цвм, частота-код
...кодоввремени. В цепи времени ЦВМ формируетсятекущий код.Каждый импульс входной частоты устанавливают регистр 2 приема в состояние 1, ав блоке 3 фиксируется код времени приемакаждого импульса.Блок 5 управления формирует на выходепериодический сигнал считывания входнойчастоты б, по которому содержимое регистра2 поступает в блок 6 измерения, где формируется текущее суммарное значение количестваимпульсов входной частоты. Сигнал считывания через элемент ИЛ 1:1 7 поступает в цепьформирования сброса регистра 2 и с задержкой устанавливает его в нулевое состояние,По сигналу запроса с ЦВМ по цепи опроса в в блок 5 управления вводится информация преобразователя в ЦВМ, для чего блок503358 Формула изобретения к ЦВМ Составитель А. ИзюмовТехрсд...
Устройство для определения критического пути в графе

Номер патента: 962968
Опубликовано: 30.09.1982
Авторы: Гайдуков, Кислинский, Крикунов, Мачулин, Титов
МПК: G06F 15/173
Метки: графе, критического, пути
...все узлы моделируемого графасформированы, При этом на выходе эле мента И 18 появляется высокий потенциал, который поступает на выход 23 зустройства и свидетельствует об окончании первого этапа вычислений, атакже через элемент НЕ 19 прекраща ет подачу счетных импульсов с генератора 16 через элемент И 17. Наэтом первый этап работы устройствазаканчивается.На втором этапЕ заносится только 20 информация в виде матрицы смежностимоделируемого графа, при этом в единичное состояние устанавливаютсятриггеры 3, моделируюшие ветви граФа, а также 13 и 13, соответствую щие конечной и начальной вершинам.После занесения исходной информациина вход 23 (начинается третий этапработы устройства) подается разрешающий сигнал, в Результате чего счетные импульсы...
Датчик равномерно распределенных случайных чисел
Номер патента: 1056188
Опубликовано: 23.11.1983
МПК: G06F 7/58
Метки: датчик, равномерно, распределенных, случайных, чисел
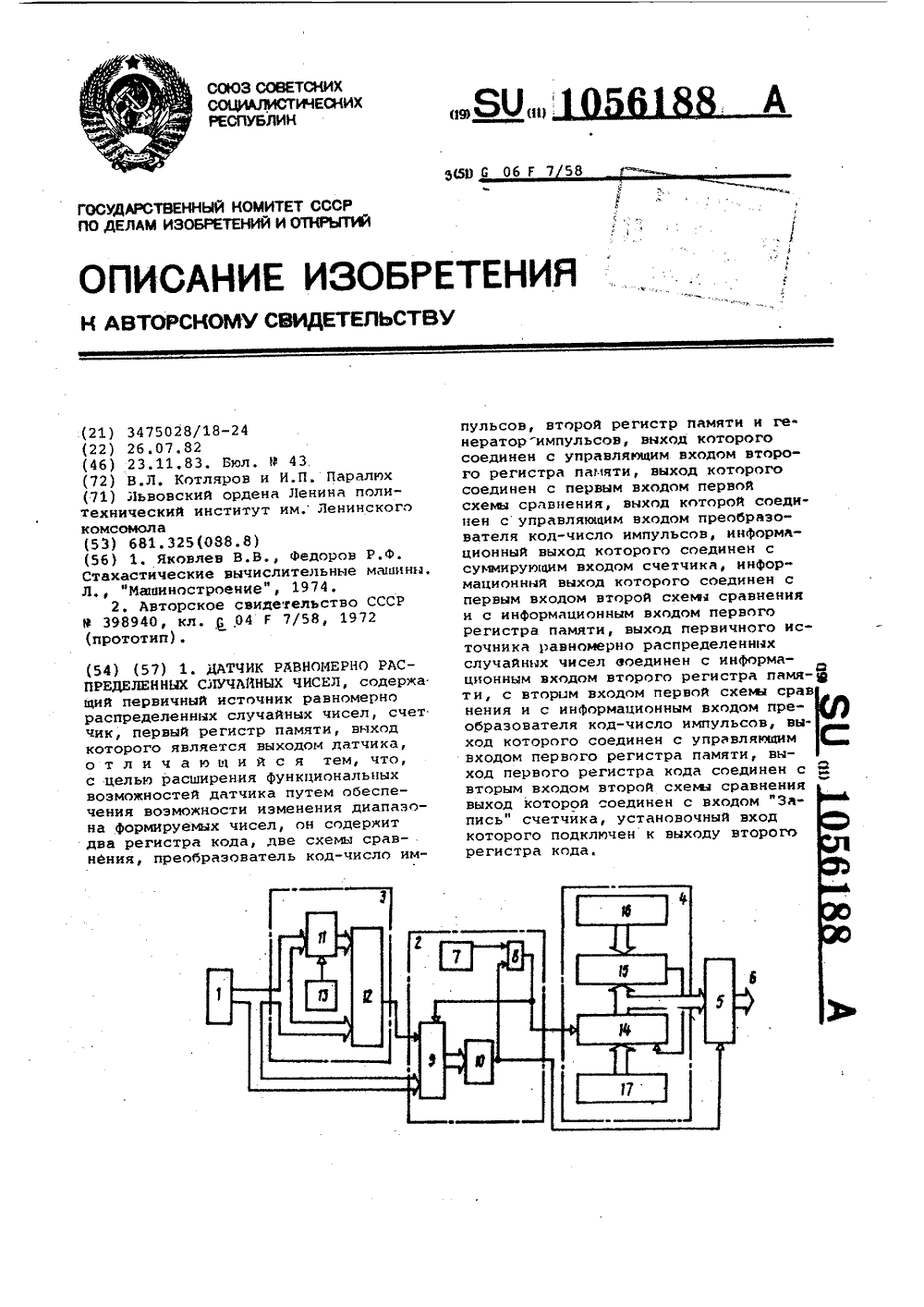
...содержит генератор 7 импульсов, элемент И 8, счетчик 9, элемент ИЛИ 10. Блок 3 определения смены кода содержит регистр11 памяти, схему 12 сравнения и генератор 13 импульсов, Преобразователь4 числа импульсов в код содержитсчетчик 14, схему 15 сравнения,регистры 16 и 17 кода.Датчик случайных чисел работаетследующим образом.Датчик предназначен для выработки случайных чисел, равномерно распределенных в интервале от А до В. Аи В - любые целые числа, которыезадаются с наборного поля. Источник 351 генерирует случайное число в интервале от 0 до 2"-1. Блок 3 определяет,когда число на выходе источника 1изменяется. После получения разрешения от блока 3 определения смены ко да случайное число преобразуетсяпреобразователем 2 в...
Предыдущий патент: Растровый преобразователь перемещения
Следующий патент: Дальномер
Случайный патент: Устройство для упаковки штучных изделий в пленку