Патенты с меткой «позиционирования»
Устройство для позиционирования магнитных головок

Номер патента: 1229819
Опубликовано: 07.05.1986
Автор: Барздайтис
МПК: G11B 21/04
Метки: головок, магнитных, позиционирования
...реверсивный счетчик 10 номера дорожки, управляющие входы 11 линеаризации характеристики преобразователя перемещения,Устройство работает следующимобразом,Перед установкой магнитной головки 7 на выбранную информационную дорожку магнитного диска (не показан)в реверсивный счетчик 10 номера дорожки заносится число, соответствующее этой дорожке и определяющее начальное состояние. Затем управляющиеимпульсы, выдаваемые схемой 9 управления, включают реверсивный шаговыйдвигатель 1, вал которого, поворачиваясь на определенный угол, поворачивает рычаг 3, который смещает тросики 6 относительно исходного положения, тем самым перемещают каретку 4и магнитную головку 7, прикрепленнуюк ней. При этом управляющие импульсыиз схемы 9 управления...
Транспортное средство для точного позиционирования груза

Номер патента: 1234309
Опубликовано: 30.05.1986
Авторы: Бичуцкий, Гельман, Зоркин, Рыхлецкий
МПК: B65G 25/00, B65G 47/74
Метки: груза, позиционирования, средство, точного, транспортное
...4 наличия груза в зоне загрузки и дает команду на включение привода перемещения тележки 1.Тележка 1 перемещается вправо до взаимодействия левой нажимной планки 9 с левым конечным выключателем 6, который даеткоманду на остановку электродвигателя.За счет инерции вращающихся маховыхмасс электродвигателя и редуктора 8 движение тягового органа 7 и тележки 1 продолжается до соприкосновения левого ограничителя 10 хода тележки с левым упором 3.При этом оставшаяся инерция гасится фрикционной муфтой привода.Груз 35 после загрузки свободно установлен на роликах 16 и в процессе движения тележки 1 не фиксируется на ней.Между грузом 35 и подпружиненными упорами 31 возможен равномерный зазор, равный 2 К, где К - расстояние от каждогоиз подпружиненных...
Способ позиционирования детали

Номер патента: 1238935
Опубликовано: 23.06.1986
Авторы: Амелькин, Еремин, Иванов, Кулагин, Прилуцкий
МПК: B23Q 3/00
Метки: детали, позиционирования
...Е - координаты равноудаленной точки всистеме координатО установочных элементов детали;а Ь;, с - координаты точки обрабатываемой поверхности в системе ко 5 ординат установочньгх элементов детали,располагается на таком же расстоянии,равном К , от оси шпинделя.Затем осуществляют последовательОные повороты детали по кратчайшемупути вокруг укаэанного центра сферыдо совмещения осей обрабатываемыхповерхностей с осью шпинделя после25 каждого поворота, Фиксируя положе.ние детали и выполняя целевое действие.П р и м е р. Деталь представляетсобой корпус, имеющий четыре обрабатываемых отверстия ушков, соответ 0,240 0,400ственно э 250,1007 э 60 0,2001.0,200 0,4006 40,6 35, оси которыхпроизвольно расположены в пространстве н скрещиваются между...
Устройство для автоматического позиционирования узла станка портального типа

Номер патента: 1242337
Опубликовано: 07.07.1986
МПК: B23Q 23/00
Метки: позиционирования, портального, станка, типа, узла
...5.50Управление положением бабки 6 осуществляется следящим приводом, состоя щим из последовательно соединенных третьего блока 21 регулирования, электрического двигателя 22, ходового вийта23, перемещаемого узла-бабки 6, датчика 24, выход которого соединен свторым входом третьего блока 21 регуЗЗ 7 2лирования, при этом первый вход третьего блока 21 регулирования соединенс третьим выходом блока 15 заданияперемещения.Управление положением полэуна осуществляется следящим приводом, состоящим из последоваТельно соединенного четвертого блока 25 регулирования, электрического двигателя 16,ходового винта 17, перемещаемого узла - ползуна 18, датчика 20, выходкоторого соединен с вторым входомчетвертого блока 25 регулирования,при этом первый вход...
Оптико-электронное устройство пространственного позиционирования

Номер патента: 1244483
Опубликовано: 15.07.1986
Авторы: Брызгалов, Великотный, Саркисян
МПК: G01B 21/00
Метки: оптико-электронное, позиционирования, пространственного
...Й, осуществляемую контуром стабилизации нормирующего сигнала, включающего в себя схему 13 сравнения, источник 14 напряжения сравнения, управляемый делитель 9, широкополосный предварительный усилитель 10, второй синхронный детектор 19, второй фильтр 20 нижних частот,Помехоустойчивое выделение опорных сигналов Ж и Е для второго и основного синхронных детекторов 19 и 12 осушествляется благодаря введению контура фазовой автоподстройки частоты (ФАПЧ), содержащего первый синхронный детектор 18, выход которого через первый фильтр 20 нижних частот, управляемый генератор 22, второй 16 и третий 17 счетные триггеры подключен к своему опорному входу. Контур ФАПЧ обладает высокой помехоустойчивостью, обусловленной наличием в его составе фильтры...
Устройство для позиционирования стопы деталей

Номер патента: 1247134
Опубликовано: 30.07.1986
МПК: B21D 43/00
Метки: позиционирования, стопы
...Корректор О.Луговая Редактор А.Огар Заказ 4051/12 Тираж 783 ПодписноеВНИИПИ Государственного комитета СССРпо делам изобретений и открытий113035, Москва, Ж, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 Изобретение относится к обработке металлов давлением, а именно к устройствам для позиционирования стопы Деталей под схват промышленного робота. 5 Цель изобретения - расширение функциональных возможностей устройст- ва путем:изменения взаимного положения стола и поплавка. На чертеже изображено предлагаемое устройство, общий вид.Устройство содержит подъемноопускной стол 1 и поплавок 2, разме щенный в емкости 3 с жидкостью. На поплавке 2 установлен силовой цилиндр 4, корпус которого...
Устройство позиционирования

Номер патента: 1247223
Опубликовано: 30.07.1986
Авторы: Боня, Бронников, Гармаш, Елов, Королев, Шелестов, Яринич
МПК: B23Q 1/25
Метки: позиционирования
...выполнены взаимо- перпендикулярные зубчатые рейки 2. Платформа 1 перемещается относительно основания 3 посредством выполненного в виде идентичных и расположенных на равном 20 расстоянии друг от друга узлов 4 - 6. Каждый узел содержит зубчатое колесо 7, установленное непосредственно или через второе зубчатое колесо 8 на валу двигателя 9. Двигатель 9 смонтирован в корпусе 1 О. Корпус 10 посредством поворотной опоры 11 закреплен на основании 3, причем ось опоры 11 проходит через точку соприкосновения зубчатого колеса 7 с платформой 1. Приводные зубчатые колеса 7 сблокированы с фотосчитывающими устройствами 12, З 11 обеспечивающими контроль координат перемещения платформы 1.Узлы 4 - 6 установлены на основании 3 так, что приводные...
Устройство для позиционирования головок записи воспроизведения

Номер патента: 1247936
Опубликовано: 30.07.1986
Авторы: Каграманов, Малышев
МПК: G11B 21/04
Метки: воспроизведения, головок, записи, позиционирования
...2 кода, подсоединенный входом к одному иэ выходов логического компаратора 19, и регистр22, При этом регистр 22 подсоединенпервым входом к выходу дополнительного преобразователя 21 кода, вторымвходом - к другому выходу логическогокоммутатора 19, а выходом - ко входудополнительного суммирующего блока 20.5 Позиционирование головок записивоспроизведения посредством предложенного устройства происходит следующим образом.2 ОИнтерферометрический датчик 1 пере.мещения каретки 2 формирует сигналыв виде сдвинутых но Фазе напряжений,которые преобразуются усилителями-ограничителями 3 в дьухуровневые эна 25ковые сигналы, несущие информацию ополярности. Блок 4 определения направления перемещения в моменты сменыуровней знаковых сигналов...
Устройство для позиционирования головок записи воспроизведения

Номер патента: 1247937
Опубликовано: 30.07.1986
Авторы: Каграманов, Малышев
МПК: G11B 21/04
Метки: воспроизведения, головок, записи, позиционирования
...вычислителем 19. Первый и второй регистраторы 20 и 21 амплитуды подсоединены информационными входами соответственно к акалого-цифровому преобразователю 14 и к дополнительному аналого-циФровому преобразователю 18 и подключены выходами к входам соответственно первого и второго делителей 22 и 23, при этом первый регистратор 20 амплитуды и первый делитель 22 образуют первый блок 24 нормирования, а второй регистратор 21 амплитуды и второй делитель 23 - второй блок 25 нормирования. 35 40 45 50 55 Позиционирование головок записи- воспроизведения посредством предлагаемого устройства происходит следующим образом.Интерферометрический датчик 1 перемещения каретки формирует сигналы в виде сдвинутых по фазе напря жений, которые преобразуются...
Система для двухкоординатного позиционирования

Номер патента: 1249484
Опубликовано: 07.08.1986
Авторы: Гяляжявичюс, Сталненис
МПК: G05B 19/39
Метки: двухкоординатного, позиционирования
...сектора. В 1 и 111 секторах большие двухкоординатные перемещения осуществляютсяс максимально допустимой скоростьюпо оси Х, равной + Ч а скоростьпо оси У определяется уровнем ограничения входного сигнала приводакоординаты У соответствующим регулятором. Во 11 и 1 Ч секторах большиедвухкоординатные перемещения осуществляются с максимально допустимой скоростью по оси 9, равной + Ч а скорость по оси Х определяется сигналом управления приводом координаты Х, ограниченным на соответствующем уровне посредством регулятора той координаты. Например, перемещение из начала координат в точку К (1-й сектор) производится скоординатными скоростями Чх (по координате Х) и Ч (по коор. - динате У), обеспечивающими заданное перемещение по прямолинейной...
Устройство для формирования управляющего сигнала системы позиционирования

Номер патента: 1262568
Опубликовано: 07.10.1986
Авторы: Кривецков, Мерзляков, Столяров, Субботин
МПК: G11B 21/04
Метки: позиционирования, сигнала, системы, управляющего, формирования
...входному коду. Кроме того,блок 2 ограничения кодового сигнала способствует уменьшению разрядности цифроаналогового преобразователя 3. В частном случае блок 4 анализа ускорения может быть выполнен в виде акселерометра. Назначение функционального преобразователя 6 состоит в обеспечении равнозамедленного движения позиционера при торможении. Преобразователь 6 представляет собою вычислитель функции извлечения квадратного корня из входного сигнала, отображающего пройденный позиционером путь. Устройство работает следующим образом.Двоичный код заданного адреса перемещения позиционера поступает на входы занесения счетчика 1 разности и проходит последовательные преобразования в блоке 2 ограничения кодового сигнала, цифроаналоговом...
Устройство для позиционирования головок записи воспроизведения

Номер патента: 1265847
Опубликовано: 23.10.1986
Авторы: Андрюшаев, Каграманов, Малышев
МПК: G11B 21/04
Метки: воспроизведения, головок, записи, позиционирования
...к другим входам второго регистратора 21 амплитуды. Выходы второго регистратора 21амплитуды соединены через включенныепоследовательно второй дополнительный реверсивный счетчик 25 и второйдополнительный цифроаналоговый преобразователь 27 со входом второгосуммирующего усилителя 23.Позиционирование головок записи- воспроизведения посредством предложенного устройства происходит следующим образом.При перемещении каретки 12 интерферометрический датчик 1 перемещения каретки формирует сдвинутые по фазе синусоидальные напряжения, которые через первый и второй суммирующие усилители 22 и 23 поступают на усилители-ограничители 2, которые преобразуют их в двухуровневые знаковые сигналы, несущие информацию о полярности. Блок 3...
Механизм позиционирования робота

Номер патента: 1266729
Опубликовано: 30.10.1986
Авторы: Боровицкая, Смелянец, Титов
МПК: B25J 9/00
Метки: механизм, позиционирования, робота
...с отверстием 7, Магнитоуправляемый выдвижной упор 13, соединенныйс рабочей зоной магнитопровода 8,выдвинут, а остальные упоры находятся во втянутом положении,Перемещение звена 1 вперед (например справа напево) осуществляется дотех пор, пока выдвинутый упор 13 маг 50нитопровода 8 не встретит подвижныйупор 15, после чего оба упора перемещаются совместно, сжимая пружину 16,воздействуя упором 15 на шток тормозного золотника (не показан) и осуществляя плавное торможение звена споследующей остановкой на жесткийупор 17, После выполнения роботомтребуемой операции (напримерзахвата 729 2детали) звено 1 перемещается в ис - ходное положение (слева напрано) и воздействует на датчик 18, после чего управляющее устройство (не показано) передвигает...
Устройство для позиционирования над магнитным диском плавающей магнитной головки

Номер патента: 1269201
Опубликовано: 07.11.1986
МПК: G11B 21/04
Метки: головки, диском, магнитной, магнитным, плавающей, позиционирования
...2. На магнитном дискс имеется зона 9 записи, ограниченная наружным 20 и внутренним 21 краями, а на переклочателе 15 имеется движок 22, выполненный, например, в виде кнопки. Вместо одной магнитной головки 5 может быть использоВан 6 и)коловок.Гри запуске устроЙства э.Сктродвигатель перемещает каретку Го направляющему элементу, перемен(ая этим лин(йно-радиально относительно врац(аоцсгося магнитного диска головку 5, Так как головка работает н планаощем режиме, то происходит ее позиционирование над магнитным диском. При подходе головки к краю 21 ограничитель 6 нажимает на плечо 13 коромысла, а оно в свою очередь нажимает на движок 22 переключателя, В результате чего трипер переводится в другое состояние изменяя этим полярность напряжения,...
Система позиционирования

Номер патента: 1282080
Опубликовано: 07.01.1987
Авторы: Ключев, Копесбаева, Сафонов
МПК: G05B 11/01
Метки: позиционирования
...могут быть использованы тахогенератор или поте нциометр, контролирующий ЭДС двигателя 1, формирует на своем выходе сигнал, пропорциональный скорости вращения вала двигателя. Этот сигнал выпрямляется в детекторе 13, выходной сигнал которого поступает на вход дифферециатора 5 и на первый вход компаратора 10. Выходной сигнал дифференциатора 5 поступает на вход двухпозиционного реле 6, которое осушествляет определение ускорения врашения вала исполнительного двигателя 1, При торможении, когда дифференциал модуля скорости отрицателен, через первый ключ 7 на вход интегратора 8 поступает отрицательный сигнал.Интегрирование сигнала в интеграторе 8 происходит до тех пор, пока скорость двигателя 1 не спадает до заранее заданного значения ыз...
Устройство для автоматического позиционирования рабочего органа металлорежущего станка

Номер патента: 1284711
Опубликовано: 23.01.1987
Авторы: Баринов, Герчиков, Мырзак
МПК: B23B 25/06
Метки: металлорежущего, органа, позиционирования, рабочего, станка
...из корпуса 25 и поршня 28, закрепленного в корпусе 2 ицструментодержателя (Фиг. 1).Передвижение корпуса 25 пневмоцилиндра отвода Йупа происходит по штифтам 29, закрепленным в корпусе инструмецчодержателя.Деталь 11 установлена на цанговой оправке 30 до упора в торец 31 детали 11, причем по условиям обработки допуск на расстояние между базовымторцом 31 и обрабатываемым торцом 15 больше величины снимаемого припуска. Цанговая оправка 30 установлена в шпиндельном узле 32 передней бабки 22..Устройство работает следующим образом,Обрабатываемая деталь 11, у которой допуск на расстояние между базовым торцом 31 и обрабатываемым торцом 15,больше величины внимаемогоприпуска д , устанавливается на цанговую оправку 30 до упора в торрец 31 и...
Устройство для позиционирования рабочего органа станка

Номер патента: 1284784
Опубликовано: 23.01.1987
Автор: Воробьев
МПК: B23Q 15/00
Метки: органа, позиционирования, рабочего, станка
...перемещения.Винт 4 закреплен в подшипниках 14 верхних салазок 3. Через подшипники 15 на винте 4 установлен маховик 16 с рукояткой, имеющий внутренние зубья, с которыми могут взаимодействовать наружные зубья шестерни 17, проточка которой сцеплена с вил кой 12, расположенной под кожухом 18,Поворотная рукоятка 19 взаимодействует с проточкой муфты-шестерни 9и снабжена расположенными под углом ф90 друг к другу упорами 20 и 21,взаимодействующими с настраиваемымикулачками 22 и 23, которые могутбыть закреплены в пазу верхних салазок 3, Перемещение верхних салазок 3контролируется с помощью линейки снониусом (не показано),Рукоятка 19, установленная на поворотном рычаге 24, может фиксироваться на последнем в положениях Б, 50В иГ,2Устройство...
Устройство двухкоординатного позиционирования

Номер патента: 1288653
Опубликовано: 07.02.1987
Авторы: Гяляжявичюс, Марцинкявичюс, Сталненис
МПК: G05B 19/39
Метки: двухкоординатного, позиционирования
...координатного привода 7, определяющих скорость по координате Х при большом значении д Х равном максимально допустимой скорости Ч.Уровень сигнала на выходе элемента И-НЕ 31 зависит от уровня сигнала на выхо - де компаратора 29. В начальный момент двухкоординатного позиционирования изображающая точка находится в начале координат, фиг.2), условие .2)соблюдается независимо от того; какие заданы перемещения по каждой координате и сигналы на выходах коммутаторов 28 и 29 соответствуют логическому "0". Вследствие этого на выходе элемента И-НЕ 3 формируется логическая "1", разрешающая прохождение на вход частотно-управляемого привода 8 управляющих импульсов с преобразователя 4 с частотой, определяющей скорость перемещения по...
Оптико-электронное устройство для пространственного позиционирования объекта

Номер патента: 1290062
Опубликовано: 15.02.1987
Авторы: Губин, Новиков, Панков, Тимофеев
МПК: G01B 11/00
Метки: объекта, оптико-электронное, позиционирования, пространственного
...колебаний, направляют на один из поляризаторов 4 и 5 соответственно. Пройдя их, излучение от каж О дого источника преобразуется в линейно- поляризованное. Поскольку оси пропускания поляризаторов ориентированы ортогонально между собой, прошедшие их пучки оказываются поляризованными во взаимно перпендикулярных направлениях. Соединяют 45 прошедшие пучки с помощью светоделителя 6, формируют объективом 7 излучение от обоих источников в параллельные пучки, которые посылают на зеркально-линзовый отражатель 1. Вторым объективом 8 оба пучка фокусируются в его фокальную плоскость. Пройдя через одну из частей анализатора 9, каждый из двух пучков излучения отражается от зеркала 10 и возвращается в объектив 8. Через каждую часть анализатора...
Устройство для отделения деталей от стопы и последующего их позиционирования

Номер патента: 1291523
Опубликовано: 23.02.1987
Авторы: Аппелт, Роланд, Шлегель
МПК: B65H 3/22
Метки: отделения, позиционирования, последующего, стопы
...устойства для отделения деталей, вастности, текстильных иэделий с улученной приспосабливаемостью захватовразличным свойствам материала.В основу изобретения положена заача, заключающаяся в том, чтобы луче приспособить к процессу захватываия элементы, оказывающие непосредстенное влияние на этот процесс в устойствах для отделения деталей тексильных изделий, и сконструироватьх с возможностью настройки на разичные свойства материала,В предлагаемом устройстве для отеления деталей от стопы и последующего их позиционировайия, имеющемтранспортную раму, силовые органы иорганы управления для перемещения ипозиционирования транспортной рамы,одни или несколько закрепленных натранспортной раме захватов, каждыйиэ которых несет захватные...
Устройство для позиционирования

Номер патента: 1301622
Опубликовано: 07.04.1987
Автор: Украженко
МПК: B23Q 1/66
Метки: позиционирования
...4 - сечение В-В на фиг, 2.15Устройство для позиционирования состоит иэ основания 1, в котором установлены направляющие 2, По последним перемещаются салазки 3, в кото рых встроен пневмоцилиндр 4, а на одной иэ направляющих 2 жестко закреплен поршень 5. На салазках 3 также смонтированы ролик 6, регулируемый винтом 7, и стопоры 8 и дополнительный стопор 9. Стопор 8 взаимодействует с наклонными участками упоров 10, Цаклонные участки представляют сектора, образующие при плотной установке упоров 10 винтовую поверх ность в один оборот с шагом РМаксимальное число и точек позиционирошагов от максимального числа и, невошедших в рабочий цикл.Если Ъ=О, это значит, что ш кратно и и настройка механизма заключается в том, чтобы винтом 7 установить...
Устройство позиционирования исполнительного органа

Номер патента: 1306708
Опубликовано: 30.04.1987
Авторы: Васейко, Груздев, Корытько, Полин
МПК: B25J 9/00
Метки: исполнительного, органа, позиционирования
...выходное звено 3 в заторможенном состоянии, т. е. выходное звено 3 должно оставаться неподвижным при воздействии случайных внешних сил.Устройство работает следующим образом.Г 1 еред началом вращения приводного барабана 6 в полости газостатических опор 2, 7 и 8 подается под давлением рабочий газ, который через капиллярные отверстия попадает в рабочий зазор соответственно между поверхностями газостатических опор 2 и выходного звена 3, газостатической части опоры 7 и рабочей поверхности приводного барабана 6, газостатической опоры 8 и 10 частью поверхности гибкой ленты 4, огибающей приводной барабан 6. Между перечисленными поверхностями создается пленка газа, находящегося при некотором повышенном давлении, исключающем...
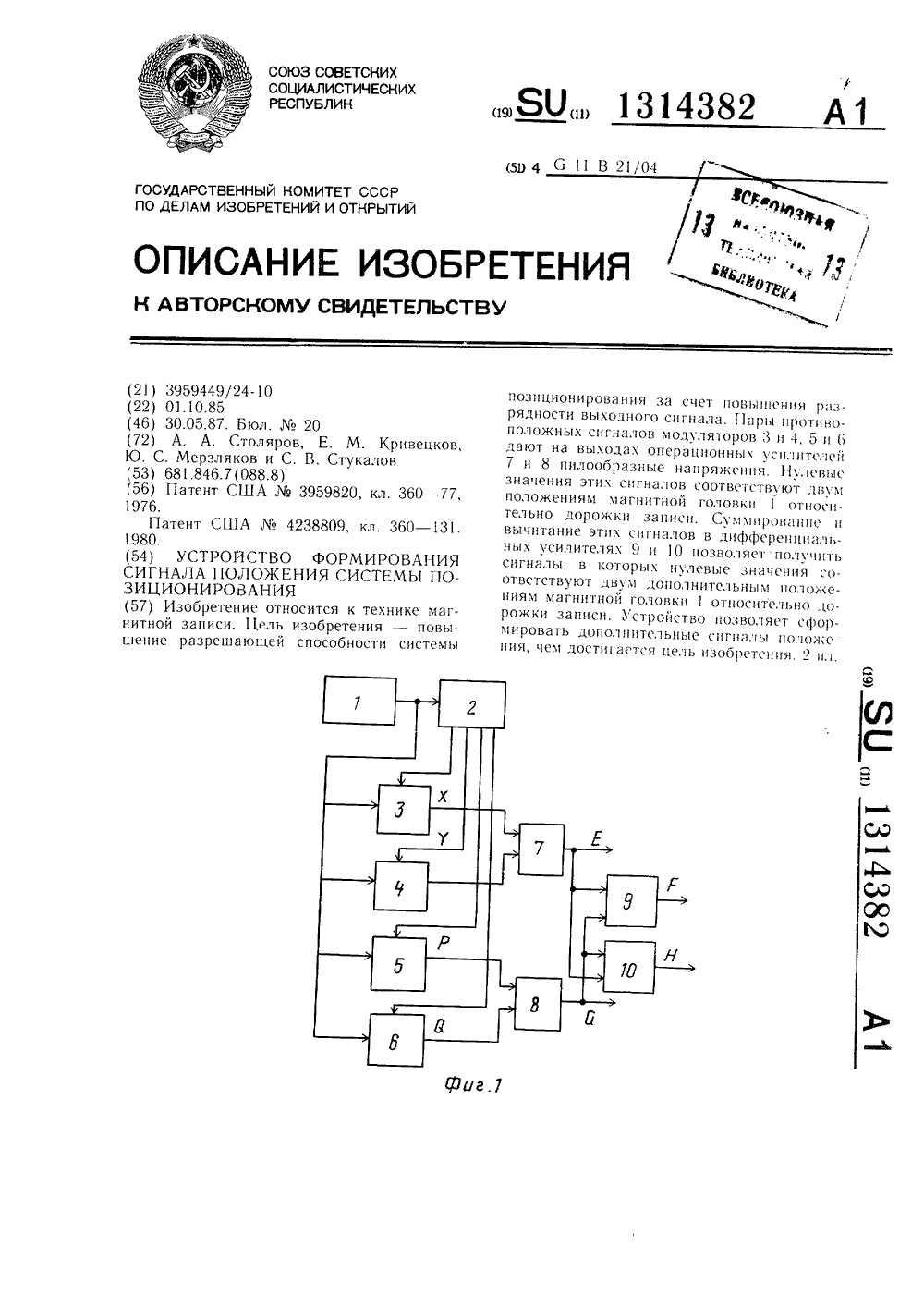
Устройство формирования сигнала положения системы позиционирования
Номер патента: 1314382
Опубликовано: 30.05.1987
Авторы: Кривецков, Мерзляков, Столяров, Стукалов
МПК: G11B 21/04
Метки: позиционирования, положения, сигнала, системы, формирования
...разредающей способности системы позициониро 5 вания за счет повышения разрядности сформированного сигнала.На фиг. 1 показана функциональная схема устройства; на фиг. 2 -- временная диаграмма выходных сигналов при переме шенин магнитной головки вдоль радиуса дискового магнитного носителя.Устройство содержит магнитную головку 1, генератор 2 стробирующих импульсов, демодуляторы 3 - 6, операционные усинлители 7 и 8, суммирующии и вычитаю 15 гций дифференциальные усилители 9 и 10 соответственно.Устройство работает следующим образом.Магнитная головка 1 имеет длину рабочего зазора, равную ширине двух дорожек на которых записаны четыре типа фазомодулироваццых сигналов. Поэтому сигнал, воспроизведенный магнитной головкой 1, демоду...
Устройство для позиционирования штока силового цилиндра

Номер патента: 1315963
Опубликовано: 07.06.1987
Авторы: Королькова, Хаймович
МПК: G05G 15/08
Метки: позиционирования, силового, цилиндра, штока
...2мает конец правого плеча 24 к своемукулачку 4.На оси 25, закрепленной на конечном выключателе, сидит рычаг 26, а вего пазу на той же оси 25 сидит рычаг 27, который под весом своей спинки 28 прижат к рычагу 26. Пластина29, закрепленная на рычаге 26, заходит в паз корпуса между штуцерами 30и 31. Откидной рычаг 5 установлен нанеподвижном основании 2 с помощьюстойки 32 и другой оси 33 с возможностью откидываться вправо и возвращаться в исходное положение, зафиксированное выступом 34 стойки 32 поддействием груза 35,Устройство работает следующим образом.При трогании переключателя 3 влевоэуб 8 натыкается на неподвижный откидной рычаг 5 и, чтобы обойти егоповерху, поворачивает пЬ часовойстрелке рычаг 7, собачку 9, храповоеколесо 11, втулку 10 и...
Способ позиционирования режущего инструмента

Номер патента: 1324822
Опубликовано: 23.07.1987
Авторы: Амитан, Бернштейн, Васильев, Гебель, Егоров, Зыков, Клибанов, Нефедов, Старкина
МПК: B23Q 15/00
Метки: инструмента, позиционирования, режущего
...превышающее величину отжатия, и снова подводят до касания обработанной .поверхности, т.е. до появления сигнала датчика 8, Отжатие инструмента равно разности сигналов датчика 7 в момент касания инструментом обработанной поверхности и при ее обработке (во время последчего прохода).Возможен также другой вариант опреде3 13248 ления величины отжатия инструмента. Согласно этому варианту, подводят инструмент до касания с обрабатываемой поверхностью, производят отсчет по датчику 7 в момент касания, выводят инструмент иэ отверстия изделия, подводят его на фиксированную глубину резания, осуществляют проход, отводят инструмент, повторно подводят его до касания и снова производят отсчет. 10Величина отжатия равна установленной глубине резания за...
Устройство для позиционирования магнитной головки

Номер патента: 1327175
Опубликовано: 30.07.1987
Авторы: Барздайтис, Дагилис, Жямайтис, Климас
МПК: G11B 21/10
Метки: головки, магнитной, позиционирования
...9 и 10. Нторой конец ленты 6 заужен и размещенмежду ветвями 7 и Я, при этом лента6 свернута в виде К -образного витка,размещенного с охватом барабана 3, 28Узкий конец ленты 6 прикреплен к каретке 4.Устройство содержит также блок 11питания, коммутатор 12 и блок 13сравнения. Каретка 4 прикреплена ккорпусу на направляющих штангах14 и 15,Предлагаемое устройство работаетследующим образом.При включении электродвигателя 135вал 2 поворачивается на некоторыйугол, определяемый шагом перемещениямагнитной головки. Поворот вала 2барабаном 3 и гибкой лентой 6 преобразуется в поступательное перемещение каретки 4. Перекос каретки 4 приводит к разбалансу сил натяжения вет вей 7 и 8 ленты 6 и, соответственнок разбалансу сигналов с датчиков натяжения...
Способ позиционирования детали

Номер патента: 1331628
Опубликовано: 23.08.1987
Авторы: Амелькин, Еремин, Кулагин, Прилуцкий
МПК: B23Q 3/00
Метки: детали, позиционирования
...Кот второй точки, затем вокруг центра дополнительной сферы до совмещения оси обраба. тываемой поверхности с осью шпинделя При,)ер. Обрабатываемая деталь представляет собой стойку, имеющую шесть обрабатываемых отверстий усиков вилок соот 18, касательной к трем первым поверхностям и отстоящей от оси 19 шпинделя на расстоянии, равном радичсч К), который Определяют из соотношения К) = ( а - Хо) ) 2+ (Ь+ Ъ о) ) 2+ (С, - 2 о) ) ", где К) кратчайшее расстояние от точкидо обрабатываемой поверхности;Хо), 10;координаты точки и обрабатывае а мой )-той поверхности в системе ко Ь С, ординат установочных элементовдетали (1= 1 3).Затем совмещают вторую точку поворота детали с центром дополнительной сферы 20 с радиусом К 2, которая проходит через...
Устройство для шагового позиционирования объекта

Номер патента: 1335930
Опубликовано: 07.09.1987
МПК: G05B 19/08
Метки: объекта, позиционирования, шагового
...иметь в виду, что схема счета импульсов при шаговом позиционировании и коррекции положения исполнительного органа одна и та же, авремя включения реле 19 и 20 значительно больше времени перехода подвижного контакта шагового искателя 7 с одного подвижного контакта на другой.П р.и м е р. Приварка патрубков к обечайкам производится вертикальными столбцами, оси которых расположены на одинаковом расстоянии друг от друга. Размеры валиков, составляюших столбец, различны по высоте. Поэтому для получения валиков требуе-, мой конфигурации необходимо корректировать положение горелки относительно оси столбца.Для примера рассмотрим четыре точки позиционирования А, А, Аз и А 4 ь показанные на фиг. 3 в порядке позиционирования исполнительного...
Устройство для позиционирования магнитных головок

Номер патента: 1337919
Опубликовано: 15.09.1987
Автор: Барздайтис
МПК: G11B 21/04
Метки: головок, магнитных, позиционирования
...управляющие входы 11 линеариэации характеристики преобразователя перемещения и цилиндрический барабан 12, установленный по оси вала 2 шагового двигателя 1 и соединенный с валом 2 при помощи шарикоподшипников 13.Устройство работает следующим образом.Перед установкой магнитной голов-. ки 7 на выбранную информационную дорожку магнитного диска (не показан) в реверсивный счетчик 10 номера дорожки заносится число, соответствующее этой дорожке и определяющее начальное состояние, затем управляющие импульсы, выдаваемые схемой 9 управления, включают реверсивный счетчик 10 номера дорожки и изменяют его состояние до нуля. Когда содержание 37919гсчетчика 10 номера дорожки равно нулю, с его выхода в схему 9 управления подается импульс, который...
Способ позиционирования инструмента

Номер патента: 1340908
Опубликовано: 30.09.1987
Авторы: Бердников, Грузин, Князев, Орлов, Симакин
МПК: B23B 1/00
Метки: инструмента, позиционирования
...реализуетсяследующим образоМ,В процессе пробного. резания заготовки 1 изменяют величину углового ,положения режущего инструмента 2 относительно вектора его перемещения Б и снимают частотную характеристику инструмента, выявляя соответствие между указанными параметрами, т,е, зависимость Г = Р(р ), где 2 - частота колебаний режущего инструментавеличина угла между режущим инструментом и вектором его перемещения.Затем в процессе обработки осуществляют угловой разворот режущего инструмента до момента равенства час 8 2тоты его колебаний установленномупри пробном резании значению,Предлагаемый способ основан натом что различным угловым положени 9ям режущего инструмента относительновектора его перемещения соответствуют определенные степени...