Патенты с меткой «объекта»
Устройство определения координат объекта

Номер патента: 1562980
Опубликовано: 07.05.1990
Авторы: Алпатов, Бакут, Ворновицкий, Селяев, Степашкин, Хлудов
МПК: H04N 7/18
Метки: координат, объекта
...изобрджений 1 вычисляются заранее и записы- ния объекта. Если в течение последвдится в блок памяти пороговых функ- них Ь кадров объект переместился ций, представляющий собой блок по-нд расстоятте, превьпплищее величину стояцной памяти, .ри этом зцлчение 15 интервала дискретизации изображения, дисперсии аддитивных помех,присутст- то производится обновление этдлоцновуищих нл изобрлжеции, считается по- го изобрлжеция, в качестве которого стоянным и известным. выбирается изображениобъекта, гт- На втором этапе вычисттений гроиз- женное по алгоритму (2), Если зл 1. водится сглаживание изображения объек кадров перемещение объекта це цревыта в соответствии с алгоритмом межкад- сило величины одного дискретл, то ровой фильтрации производится...
Устройство контроля состояния объекта

Номер патента: 1564667
Опубликовано: 15.05.1990
Авторы: Клюквин, Синьковский, Улиско, Шаповалов
МПК: G08B 26/00
Метки: объекта, состояния
...36 записи "О 1 приводит к снятию сработавшего датчика 1 с контроля и, продолжению опроса остальных датчиков 1, При удержании кнопки 40 разрешения обращения к блоку памяти в нажатом состоянии и нажатии на кнопку 31 записи "1" или кнопку 36 записи "0" в блок 3 памяти во все ячейки памяти с частотой опроса происходит последовательная запись "1" или "0".Записанное значение "1" во всех ячейках памяти блока 3 памяти позволяет оперативно выявить все датчики 1, находящиеся в неразрешенном состоянии после нажатия кнопки 31 записи " 1" и кнопки 40 разрешения обращения к блоку памяти, так как их адреса поочередно отображаются блоками 6, 7 индикации, Сброс очередного адреса, высвеченного блоками 6 7 индикации, осуществляется нажа6 бб/замыкающего...
Устройство для дистанционного измерения угловых отклонений объекта

Номер патента: 1566206
Опубликовано: 23.05.1990
МПК: G01B 11/26
Метки: дистанционного, объекта, отклонений, угловых
...на втором объективе 5, 1 роме того, обозначенизобра 55женил 7 и 8 марок 2 и 4 коллиматора(на регистрирующем блоке 6, 71 и У,Х, и Х( - текущие координаты смещения центров изображений 7 и 8 светяки друг с другом на входной апертуреприемного объектива 5, с помощью ко"торого строят их иэображения на позиционно-чувствительном регистрирующемблоке, Измеряют изображения обеих марок на регистрирующем блоке и по измеренным координатам вычисляют углыповорота объекта относительно трехкоординатных осей, 3 ил,щихся марок 2 и 4 при угле поворотаобъекта, Х,- текущие суммарныерасстояния между центрами иэображений7 и 8, 21 - расстояние между оптическими осями объективов 1 и 3 первогои второго коллиматоров.Объектив имеет воэможность поворотта...
Устройство для контроля положения движущегося объекта

Номер патента: 1566213
Опубликовано: 23.05.1990
Авторы: Виноградов, Голубев, Дороган, Красавин, Пугин, Штерн, Щукин
МПК: G01B 21/00
Метки: движущегося, объекта, положения
...10Контролируется положение движущегося объекта 12, имеющего участокс отражающей поверхностью 13, 30Устройство работает следующим образом,Поток излучения, формируемый источпиком 1 света, через осветительныйсветовод 2 падает на поверхность дви- З 5жущегося объекта 12, При перемещенииобъекта 12 пучки света. отражаются ототражающей поверхности и через приемный световод 3 падают на фотоприемник 5, 40Максимальное значение сигнала, снимаемого с фотоприемника 5, запоминается пиковым цетектором 8, входящимв блок 7 обработки сигнала, При достижении сигнала на выходе пикового 45детектора 8 заданного значения срабатывает ампглтудный дискриминатор 9,При перемещении отражающей поверхности 13 по ходу напраления движенияобъекта 12 пучки света...
Устройство для измерения угла наклона объекта

Номер патента: 1566219
Опубликовано: 23.05.1990
Авторы: Ульянов, Урицкий, Фридман
МПК: B66C 13/46, G01B 5/24
...5-7. Гаситель колебанийжидкости установлен под перемычкой4 и выполнен в виде дросселя 12 ссимметрично расположенными седлами13 и плавающим клапаном 14,Над перемычкой 3 расположена дополнительная полость 15, сообщеннаяканалом 16 с полостью 2. В полости3515 установлен сильфон 17, Корпус 1экранирован и заземлен, Дроссель 12выполнен с вентилем 18,Датчик питается высокочастотнымнапряжением, при этом блок 8 сигнализирует направление отклонения сполиспаста и блокирует механизм крана при чрезмерном его отклонении.Устройство работает следующим 45образом,При наклоне полиспаста наклоняется корпус 1, при этом газовый пузырек 1.1 смещается относительно обкладок 5-7 и изменяется емкость50конденсатора между обкладками 5, 7и 6, 7, при этом блок 8...
Оптический датчик перемещений объекта

Номер патента: 1567872
Опубликовано: 30.05.1990
Авторы: Конаков, Мурашкина, Роганов, Хаева
МПК: G01B 11/00
Метки: датчик, объекта, оптический, перемещений
...7, Отраженный от поверхностиупругой отражающей пластины 4 световой поток Ф поступает на приемники 402 и 3 излучения, с выхода которых снимается электрический сигнал, пропорциональный контролируемому перемещению Х.При изменении температуры окружающей среды изменяется излучающая способность излучателя., а следовательно, и освещенность ФП изменяется навеличину 5 Е определяемую выражениями (для ТЯ) и (6) (для РИЛ),50(2)Из выражений (1) и (2) следует, что уменьшить температурную погрешность, обусловленную изменением аЕ можно, уменьпыв эначеже сов 1 т,е, изменив наклон отражающей поверхности, Этого достигают изменением формыотражателя при действии температуры,При изменении температуры окружающей среды изменяется эффективная дли-на 1 втулки...
Устройство для измерения угла поворота объекта

Номер патента: 1567877
Опубликовано: 30.05.1990
Авторы: Берштам, Клямкин, Лазарев, Слив, Урьяш
МПК: G01B 11/26
Метки: объекта, поворота, угла
...не показано), фиксированной 15в опорах 2, кронштейнов 3 и 4, жесткосоединяющих фотоэлектрические автоколлиматоры 5 и 6 с зеркалами 7 и 8, автоколлиматор 5 соединен с платформой1, и автоколлиматор 6 установлен не-подвижно, модулятор 9 с приводом ввиде двигателя 10, установленным соосно модулятору 9, который выполненв виде полого щелевого цилиндрического растра 11, длина одной из щелей 2512 которого отлична от длины остальных щелей, блока 13 обработки информации, подключенного одним входом кодному автоколлиматору 5, а вторымвходом - к выходу другого автоколли 30матора 6, и блока 14 питания, соеди-ненного с соответствующими входамидви гат еля 10,Устройство работает следующим образом,35Модулятор 9 приводят во вращениедвигателем 1 Ц с...
Оптико-электронное устройство для измерения угловых отклонений объекта

Номер патента: 1567879
Опубликовано: 30.05.1990
МПК: G01B 11/26
Метки: объекта, оптико-электронное, отклонений, угловых
...( не показано) и фокусом второго объектива 5. Фотоприемник 3 выпалнен многоэлементым, например, в видеприбора с зарядовой связью,Центр выходйого зрачка второго объектива 5 смещен с оптической оси 30 объектива 1 на расстояние 1, оптическая ось второго объектива 5 пересекает оптическую ось объектива 1 на передней грани отражателя 2, а оптические оси объективов лежат в плоскости 35 главного сечения призменных блоков отражателя,Отражатель 2 выполнен из двух призменных блоков (фиг, 2), каждый иэ которых состоит из двух пар прямоуголь ных призм 6, 7 и 8, 9, соединенных между собой катетными гранями, а призменные блоки соединены гипотенузными гранями призм, имеющими один и тот же показ атель преломления, На свободной 45 части соединяемой...
Устройство для ударного нагружения объекта

Номер патента: 1567903
Опубликовано: 30.05.1990
Авторы: Гольдштейн, Добросельский, Коваленко, Николаев
МПК: G01M 7/08
Метки: нагружения, объекта, ударного
...21 перемесцения и платформой 11. Груз 4 установлен с возможностью перемещения по штангам 10, а соединение концов штанг 10 с первым сбрасываемым грузом 1 осуществлено с возможностью перемещения вниз груза 1 относительно штанг О при остановке платформы 11 ограничителем 21 и выполнено, например, в виде резьбового соединения 22, установленного в ступенчатом отверстии 23.Груз 1 может быть установлен с зазором з относительно бойка 15 или с непосредственным контактом (не показано). Второй сбрасываемый груз 4 (его части 5 и 6) совместно с элементами соединения - штангами 10 (гибкими элементами 9) образуют ускоритель сбрасываемого груза 1. Устройство работает следующим образом.Нагружаемый объект устанавливается на основании 8 (или...
Шарнирный трубопровод для связи подвижной и неподвижной частей объекта

Номер патента: 1569504
Опубликовано: 07.06.1990
Авторы: Верхоглядов, Никитин, Огаркова, Фомин
МПК: F16L 27/00
Метки: неподвижной, объекта, подвижной, связи, трубопровод, частей, шарнирный
...между собой упругим элементом 14, например пружиной.Пружина 14 соединена с подвижными тя. гами 15, имеющими прорезь а. Тяга 15расположена с возможностью движенияв кронштейне 16, шарнирно закрепленном на оси 17, Последняя входит впрорезь а тяги 15, а ее концы жесткозащемленыв опорах 18 упорных пластин13. На последние могут надеватьсядополнительные насадки 19. Креплениедополнительных насадок 19 к. упорнымпластинам 13 может производиться с/ 4помощью болтового соединения не показано). Гайка 20 фиксирует положение тяги 15 относительно кронштейна 16. Планки 9 и 10 соединены между собой осью 21. Фиксация относительного расположения планок 9 и 10 производится п 1 и помощи штифта 22. Крайние звенья труб соединены с подвижной частью 23 объекта...
Устройство для определения углов наклона подвижного объекта

Номер патента: 1569544
Опубликовано: 07.06.1990
Авторы: Герасимов, Пономарев, Терехов
МПК: G01C 9/10
Метки: наклона, объекта, подвижного, углов
...света, то выходящий световой пучок линейно поляриэован с азимутом Фо= 90 , так как сумма двух Вазовых четвертьволновых пластин с одинаковым направлением главных осей работает как джазовая полуволновая пластина. Далее световой пучок, пройдя в обратном ходе модулятор 4, попадает на поляризатор-анализатор 3 и,: пройдя его, отражается от полупрозрачного зеркала светоделителя 2 каналов и попадает на Аотоприемник 8. так как азимут оси наибольшего пропускания анализатора поляризатора 2 р = О, а азимут поступающего на него линейно поляризованного светао0 = 90 , то на фотоприемнике 8 интенсивность света 1 = О. Если маят-. ник 7 (устройства) отклоняется от вертикали и тем самым поворачивает четвертьволновую пластину 5 с зеркалом 6 на...
Устройство для измерения скорости линейного перемещения объекта

Номер патента: 1569714
Опубликовано: 07.06.1990
Авторы: Кириевский, Михайлов
Метки: линейного, объекта, перемещения, скорости
...далее), входящих в одну из двух систем отражателей, обеспечивающих параллельность падающего и отраженного пучков.Устройство работает следующим образом.В делителе 9 частоты ИВИ в исходном состоянии установлен коэффициент деления, равный количеству тоцек (фиг.1, восемь точек: Х Х),, Х) измерения скорости, В память вычислителя 7 занесены значения длин отрезков О Х; траектории между точками измерения скорости, В исходном состоянии триггер 7 и счетчик 4 обнуленн, При появлении на контролируемой траектории объекта, длина которого вдоль траектории о ( бХ , последний пересекает луч в точке Х траектории движения и перекрывает его, затемняя вход приемника 2, В результате на выходе последнего формируется первый импульс, который вторично сбрасывает...
Устройство для определения положения объекта на изображении

Номер патента: 1569853
Опубликовано: 07.06.1990
Авторы: Алпатов, Селяев, Степашкин, Хлудов
МПК: G06K 9/36
Метки: изображении, объекта, положения
...координат объекта, то суммирование изображений объекта приводит к уменьшению дисперсии аддитивной некоррелированной помехи. Другим положительным следствием данного межкадрового сглаживания являет. ся сглаживание ошибок. На вход блока 2 поступают значения элементов участка текущего кадра, взятого относительно найденных координат объекта. Выбор соответствующего участка текущего кадра обеспечивается с помощью блока 4 управления, Значения координат объекта в текущем кадре (сигнал у 8) поступают из блока 7 определения координат в блок 4 управления.Четвертый этап можно разделить на три подэтапа:обнуление содержимого БОП 14 (4.1);вычисление гистограмм Ро, Р, (4.2);вычисление элементов матрицы Р и бинарного изображения объекта 2 (4.3).,...
Устройство для измерения скорости движения объекта

Номер патента: 1571508
Опубликовано: 15.06.1990
МПК: G01P 3/36
Метки: движения, объекта, скорости
...по линейному закону и определяет скорость перемещения луча. Световой поток, проходя через формирующую оптическуюсистему модулируется в зоне иэмеФ50рения по амплитуде неоднородностямидвижущегося объекта, воспринимаетсяфотоприемником б и усиливается вселективном усилителе 13,В момент совпадения скорости перемещения луча и объекта демодулированный и отформированный с помощью блоков 14, 7, 8 и 9 импульсный сигнал поступает на вход управления регистратора 10, по которому фиксируется пропорциональное длине развертки мгновенное значение сигнала на 2-м выходе генератора. Этот сигнал, проградуированный в значении скорости объекта, фиксируется регистратором.1В предлагаемом устройстве обеспечивается интегральный съем информации о скорости объекта...
Способ измерения положения проекции границы объекта на фотоприемнике с зарядовой связью

Номер патента: 1573341
Опубликовано: 23.06.1990
Автор: Рубан
МПК: G01B 11/16
Метки: границы, зарядовой, объекта, положения, проекции, связью, фотоприемнике
...подключен к управляющему входу ФПЗС 7,выход которого подключен к входусглаживающего фильтра 9, выход которого является выходом измерительного канала. Выход первого измерительного канала 1 подключен к первомувходу Формироватепя 3 сигнала деформации, к второму входу которого подключен выход второго измерительногоканала 2, Осветители 4 первого ивторого измерительных каналов 1 и 2освещают соответствующие границыобразца 10. 25Способ осуществляется следующимобразом,На границы образца 10 (Фиг. 1)направляют с помощью осветителей 4параплельные пучки света. При этомв каждом измерительном канале 1 и 2изображение соответствующей границыобразца 10 через светофильтр 5 проецируется объективом б на ФПЗС 7,Формирователь 8 управляющих импульсов...
Способ определения положения границ объекта

Номер патента: 1573345
Опубликовано: 23.06.1990
МПК: G01B 21/00
Метки: границ, объекта, положения
...отражателя в зоне щели диафрагмы 8 получаютмаксимум интерференционного поля,а в другом крайнем положении - минимум. При перемещении объекта 23 взоне щели диафрагмы 8 появляются дви"жущиеся в противоположных направлениях изображения границы объекта. 2 ОПри этом на выходе фотоприемника 9появляется сигнал Б (см. Фиг. 2),Фильтр 10 выделяет из сигнала П, участок гармонических колебаний и 21 симметрирует эти колебания относительно нулевого уровня. Индикатор 11 нуля формирует короткий прямоугольный импульс по переднему фронту поступающих на него прямоугольных импульсов, а одновибратор 12 - по заднему Фронту, Элементом ИЛИ 13 сигналы оцновибраторов 12 и 17 объединяются (см. Ю,). Эти сигналы поступают на первый управляющий вход Регистра 21...
Способ диагностирования состояния технического объекта с выбросами параметров и устройство для его осуществления

Номер патента: 1573461
Опубликовано: 23.06.1990
Авторы: Демиденко, Запорожцев
МПК: G06F 17/18
Метки: выбросами, диагностирования, объекта, параметров, состояния, технического
...триггер 12 устанавливается в единичное состояние. Логическая единица с выхода триггера 12 закрывает элемент 10, прекращает подсчет числа совпавших значений, Переключатель 7 подает единичный сигнал на управляющие входы ключей 13 - 132, открывает путь для прохождения ца элементы 14- 14 д и 15, - 15 м значений характеристик и и Б , Заканчивается работа устройства, соответствующая второму этапу протекания случайного процесса,На третьем этапе, когда осуществляется диагностика неисправностей,гзначени и и Б поступают на входы элементов 14- 14 н или 15- 15 м, В зависимости ат значения величины и или Ы на выходах соответствующих2элементов появляется единичный сигнал. На дешифраторы 16 и 17 поступают соответствующие коды. В результате...
Способ позиционирования объекта мерной длины

Номер патента: 1575153
Опубликовано: 30.06.1990
Авторы: Катковник, Никитин, Ручкин
МПК: G05D 1/02
Метки: длины, мерной, объекта, позиционирования
...(например, визуальный) положения объекта относительно заданной линии позицио" нирования, измерение скорости движения объекта и торможения объекта,повышение производительности и точности способа позиционирования. Способ включае, контроль (например, визуальный) положения объекта относительно заданной линии позиционирования, измерение скорости движения объекта и торможение объекта, причем торможение объекта начинают с вре" менной задержкой т относительно момента пересечения линии позиционирования ближайшей к ней кромкой объекта, а временную задержку т вычисля 1 - Б линии позиционирован н ей кром кой объе кта,ил ецения линии позижайшей к ней кромкой157 Я 53 1 - Я3 ч Способ позиционирования объекта мерной длины, включающий контроль...
Устройство для контроля неисправности объекта

Номер патента: 1575207
Опубликовано: 30.06.1990
Авторы: Красников, Науменко, Черепащук
МПК: G06F 11/07
Метки: неисправности, объекта
...срабатывает счетчик 14, которьй на своих выходах Формирует код адреса датчика в запоминающем устройстве. По фронту импульса на выходе мультиплексора 9 происходит запись в блок 17 кода номера сработавшего датчика, который формируется счетчиком 15 и соответствует коду номера ячейки, при опросе которой на выходе мультиплексора появляется импульскода номера цикла, сформированногона выходе коммутатора 7 по адресу,сформированному счетчиком 14. Такимобразом в блок 17 по адресу "1" записывается код нойера цикла "10" иномер датчика "1" по адресу "2" кодномера цикла"10" иномер датчика"1",по адресу "3" код номера цикла "10" 10и номер датчика 43 . Когда код навыходе счетчика 1 5 достигает значения , равного максимальному числу д атчика, а...
Устройство для физического моделирования полета исследуемого объекта

Номер патента: 1575226
Опубликовано: 30.06.1990
Авторы: Кирдяшов, Куркин, Терентьев, Тынчеров, Хасина
МПК: G09B 23/00
Метки: исследуемого, моделирования, объекта, полета, физического
...испытательногостенда.ПпПолагая Ч = --- (м/с) получим60113 4.г -30 и - - -1 1ПИсходя из этого, Формирование не-обходимых исследуемых плоских траекторий может. производиться либо регу=/лятором 10 скорости привода 9 ведущего шкива 2(т.е,изменением скоростидвижения ленты 1 при постоянном углезапуска), либо изменением положениявходного 3 и выходного 4 роликов пу тем поворота вокруг оси 5 коромысла 11 (т.е. изменением угла запускаленты 1 при постоянной скорости еедвижения), либо одновременно двумявышеуказанными способами, что позволяет./ Ф 45 получать большое разнообразие Формисследуемых плоских траекторий.Экспериментально и теоретическиустановлено, что условием подъемаленты является условие р ) Р, кото рое должно выполняться одновременно...
Механизм прямолинейного перемещения объекта

Номер патента: 1576315
Опубликовано: 07.07.1990
Авторы: Гришко, Иванов, Моргачев, Семенов
МПК: B25J 18/00
Метки: механизм, объекта, перемещения, прямолинейного
...Рычаги 7 имеют на концах внешние 8 и внутренние шарниры 9 и 10. Внешние шарниры 8 соединены планками 1 1 и 12, проходящими через внутренние шарниры 2, Внутренние шарнирь, 9 и 10 связаны планками 13 и 14 с шарнирами 3 и 4В планках 13 и 14 выполнены пазы для шарниров 3 и 4Механизм работает следующим образом.При включении привода получает вращение коническое зубчатое колесо 6, От него приводятся два зубчатых колеса 5, соединенных каждое соответственно с одним из рычагов 1, Зубчатые колеса 5 вращаются в противоположные стороны, а рычаги 1, образующие ромьы, начинают сходиться, увеличивая общий вылет, или расходиться, уменьшая вылет, При схождении стержней внутренние шарниры 2 поступательно перемещаются по общей 5оси. Вместе с ними...
Способ определения напряженно-деформированного состояния объекта

Номер патента: 1578460
Опубликовано: 15.07.1990
МПК: G01B 11/16
Метки: напряженно-деформированного, объекта, состояния
...величину интенсивностисветового потока, прошедшего через объект, возвращают анализатор, после нагружения объекта снова удаляют анализатор, ориентируют плоскость поляризации света по одному из направленийквазиглавных напряжений и деформацийи измеряют величину потока, прошедщегочерез объект. 2 ил. 2 табл. Й - толщина диска; Й,и Я - квази- главные (главные в диске) деформации,П р и м е р. Определяли оптическую анизотропию, замороженную в сжатом вдоль центральной оси диске (Фиг,1,2) из полимерного материала на базе эпоксидно-диановой смолы ЭДМ. Размеры диска: диаметр 50 мм, толщина 5 мм, величина сжимающей силы 19,6 Н. Температура замораживания материала диска 132 С. Измеряли величину относитель- ного (в процентах) поглощения интен- ф...
Способ измерения малых угловых поворотов объекта

Номер патента: 1578462
Опубликовано: 15.07.1990
Авторы: Аугустайтис, Бансявичюс, Гинетис
МПК: G01B 11/26
Метки: малых, объекта, поворотов, угловых
...тов объекта состоит в том, что ированный поток излучения форсходящимся, делят на два по- каждый из них направляют на тствующую отражающую поверхОдна иэ поверхностей усивается на объекте, другаяв качестве опорной, Отые от поверхностей потокимодулю вектора смещения центра интерференционной картины вычисляютугловые повороты зеркальной поверхности, а следовательно, и объекта.Если поверхность обеспечивает зеркальное отражение потока излучения,то объект можно устанавливать в потоке излучения непосредственно нанекотором расстоянии от точки фокуса. 10Устройство, реализующее данныйспособ измерения работает следующимобразом,Луч света, излучаемый лазером 1, проходит коллиматор 2, фокусируется линзой 3 в точку,.А. Светоделитель 4 делит...
Способ определения координат точек объекта

Номер патента: 1578473
Опубликовано: 15.07.1990
Авторы: Дегтярев, Демидов, Нефедов
МПК: G01C 15/00
Метки: координат, объекта, точек
...его точек. С целью повышения производительности теодолитом, установленным в точке с известными координатами, измеряют азимуты и зенитные расстояния до трех точек объекта, измеряют линейные расстояния 12,1 1 1 ъ, 1 З между этими точками объекта и определяют радиусы-. векто р - Фры г г, г соответствующих точек объекта относительно точки с известными координатами иэ соотношений Для осуществления способа устанавливают теодолит в точке с известными координатами, последовательно измеряют азимуты и зенитные расстояния до точек объекта, выполняют линейные измерения расстояний 1 1 ь,Ъа между точками объекта, при обработке результатов измерений определяют радиусы-векторы г , г, гсоответствующих точек объекта относительно точки с известными...
Имитатор объекта вибрационных испытаний

Номер патента: 1578502
Опубликовано: 15.07.1990
Авторы: Зырянов, Кощеев, Кудинов
МПК: G01H 11/06
Метки: вибрационных, имитатор, испытаний, объекта
...+ С ц(1) ттн 1 1(Е) = 1где й,явектор сил, приложенных к объекту;вектор реакции объекта; вектор обобщенных координат;диагональная матрица, определяющая коэффициентыпередачи интегросуммирую щих и интегрирующих усилителей;матрица, определяющая коэффициенты передачи в блоке об.ратных связей с выходов на входы интегросуммирующих усилителей и за-; дающая демпфирование колебаний;диагональная матрица, каждый элемент которой при 1 И) -Ч(с) 502 4и резисторов К 7 - К 15, которые определяют величину демпфирования.Имитатор работает следующим образом,Входные сигналы, имитирующие силы,приложенные к объекту вибрационных испытаний, поступают на входы преобразователя 1 вектора сил, на выходахкоторого формируются сигналы,пропорциональные обобщенным...
Способ резонансных испытаний объекта на двухкоординатном вибростенде

Номер патента: 1578548
Опубликовано: 15.07.1990
Авторы: Блохин, Божко, Левин, Проценко, Шпачук
МПК: G01M 7/00
Метки: вибростенде, двухкоординатном, испытаний, объекта, резонансных
...воспроизвести наиболее тяжелый эксплуатационный режим и тем самым. повысить достоверность испытаний на вибронадежность.ной точке испытуемого объекта измеряют амплитуды колебаний по вибрационным компонентам, а также амплитудуугловой вибрации вокруг оси, перпендикулярной плоскости вибрационных компонент, Фиксируя сдвиги фаз между вибрационными компонентами, прикоторых достигаются наибольшие значения указанньм амплитуд, ЗаФиксированные значения сдвигов Лаз принимаютза резонансные.578548 щие значения, т.е, определяют резонансные сдвиги фаз. После этого вконтрольной точке платформы вибростенда воспроизводят вибрационныйпроцесс на резонансных частотах объекта с установленными значениямисдвигов фаэ между вибрационными компонентами. Формула...
Управляющее устройство для системы регулирования углового положения объекта
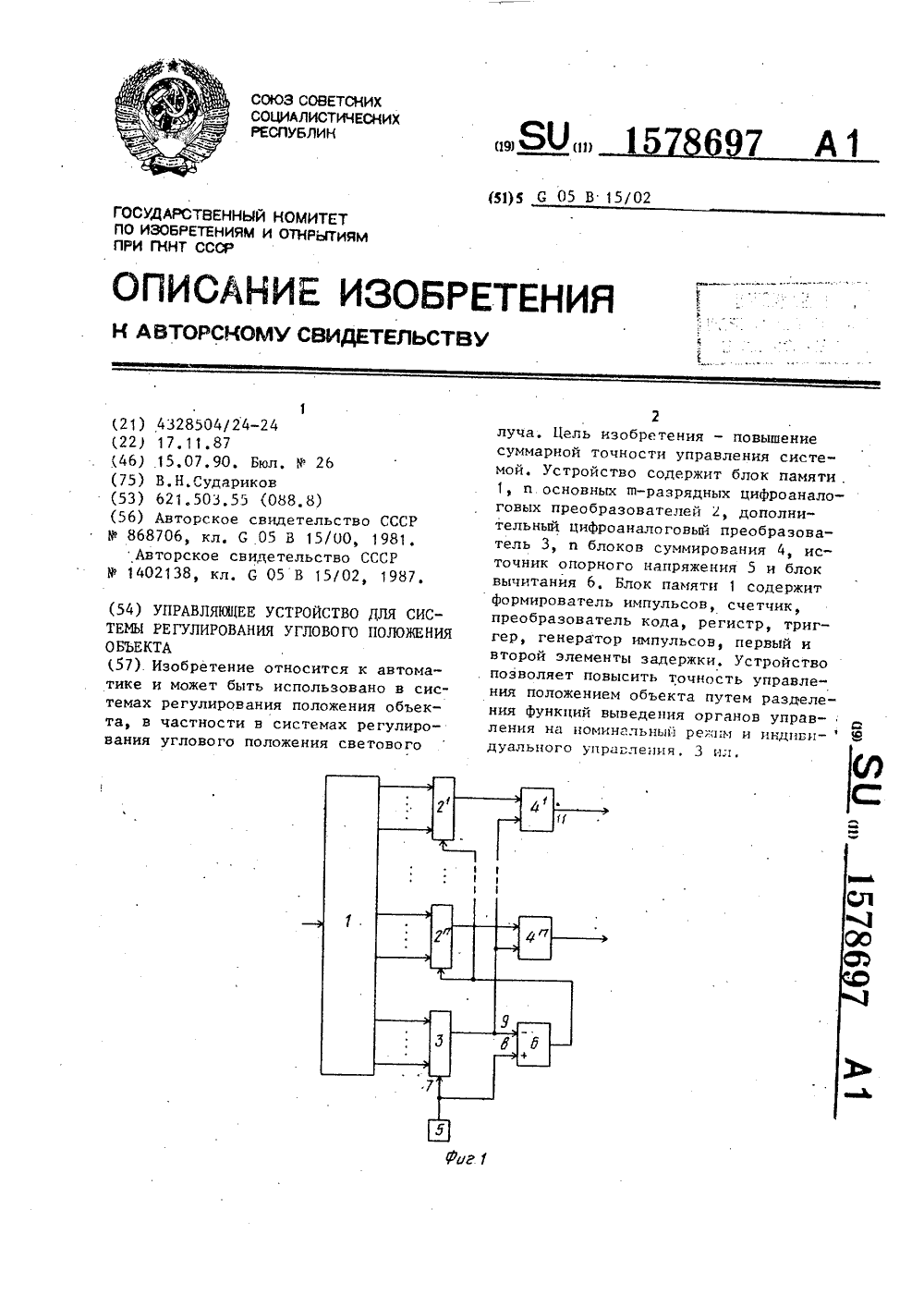
Номер патента: 1578697
Опубликовано: 15.07.1990
Автор: Судариков
МПК: G05B 15/02
Метки: объекта, положения, системы, углового, управляющее
...уменьшаться (фиг,Зл),По мере дальнейшего поступленияимпульсов генератора 17 блок памяти1 работает аналогичным образом, вос-.производя на своих выходах 1 О программу эксперимента, записанную в егопостоянное запоминающее устройство 14.При достижении напряжением на выходе блока суммирования 4 предусмотренногопрограммой уровня И и фиг.Зи,Зк), соответствующего выходу внешнихрегулирующих органов из зоны нечувствительности на номинальной рабочийрежим, программное изменение числа навыходах 10 " блока памяти 1 прекращается, вследствие чего напряжениена выходе дополнительного цифроаналогового преобразователя 3 фиг,Зз) исоответственно на выходе блока вычитания 6 (фиг,Зл), стабилизируется,а дальнейшее управление внешними орга-нами...
Устройство для подъема затонувшего объекта

Номер патента: 1579845
Опубликовано: 23.07.1990
Авторы: Ефимов, Кленин, Окунев, Пригода, Хамидулин
МПК: B63C 7/00
Метки: затонувшего, объекта, подъема
...подъема затонувшегообъекта, содержащее трос-проводник, соединенный одним концом с узлом стыковки затонувшего объекта, а другим - с буй ком-обозначителем, и грузозахватное приспособление, выполненное с возможностью перемещения по натянутому тросу-проводнику, отличающееся тем, что, с целью повышения эффективности путем снижения стоимости и повышение надежности подъема, грузозахватное приспособление выполнено с механизмом его принудительного перемещения по тросу-проводнику, с элементом плавучести и со съемным балластом, причем масса этого балласта не превышает поЗ 0 ложительной плавучести упомянутого элемента. 1579845Изобретение относится к технике судоподъема.Цель изобретения - повышение эффективности путем снижения стоимости и повышения...
Бесконтактный датчик расстояния до объекта из ферромагнитного материала

Номер патента: 1580153
Опубликовано: 23.07.1990
МПК: G01B 7/14, G01H 11/00
Метки: бесконтактный, датчик, объекта, расстояния, ферромагнитного
...материала, например КС - 37 А.На боковой поверхности магнита 5 у его торца со смещением относительно магнит- ЗО ной нейтрали постоянного магнита между ним и полкой 3 полюсного наконечника 1 закреплен элемент 6 Холла. Для повышения чувствительности датчика он может быть снабжен вторым элементом 7 Холла, закрепленным симметрично первому на боко- З 5 вой поверхности магнита 5 у его второго торца между ним и полкой 3 второго Г-образного наконечника 2. Оба элемента соединяют последовательно-согласно.Бесконтактный датчик расстояния до объ екта из ферромагнитного материала работает следующим образом.В исходном положении, когда объект контроля находится на большом удалении от датчика, магнитный поток, создаваемый постоянным магнитом 5,...
Оптический способ определения перемещений объекта

Номер патента: 1580161
Опубликовано: 23.07.1990
МПК: G01B 11/16
Метки: объекта, оптический, перемещений
...соединенный с блоком 14 управления (генератор пилообразного напряжения). Сканирование интерферометра 9 осуществ 3 1580161 .ляется блоком 10 управления базой,на который подается сигнал с блока14 управления,Разъюстированный измерительныйинтерферометр 5 (фиг. 2) представляет собой два зеркала 15 и 16, междукоторыми расположены две кварцевыепрокладки 17 и 18, разница толщинкоторых дг равна диапазону перестройки сканируемого интерферометраУголпри вершине определяется выражениемхкоксе( = агссгд ---- .Э15 где х - верхний предел нзмеряеМиксмого перемещения;ДГ - диапазон изменения базы(расстояния между пластинами) сканируемого интер ферометра.При этом угол а не должен превышать величины, описываемой выраже- нием2 йп,где Йп - диаметр...