Система управления промышленным роботом-манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 474434
Авторы: Кобринский, Корендясев, Саламандра, Тывес

Текст
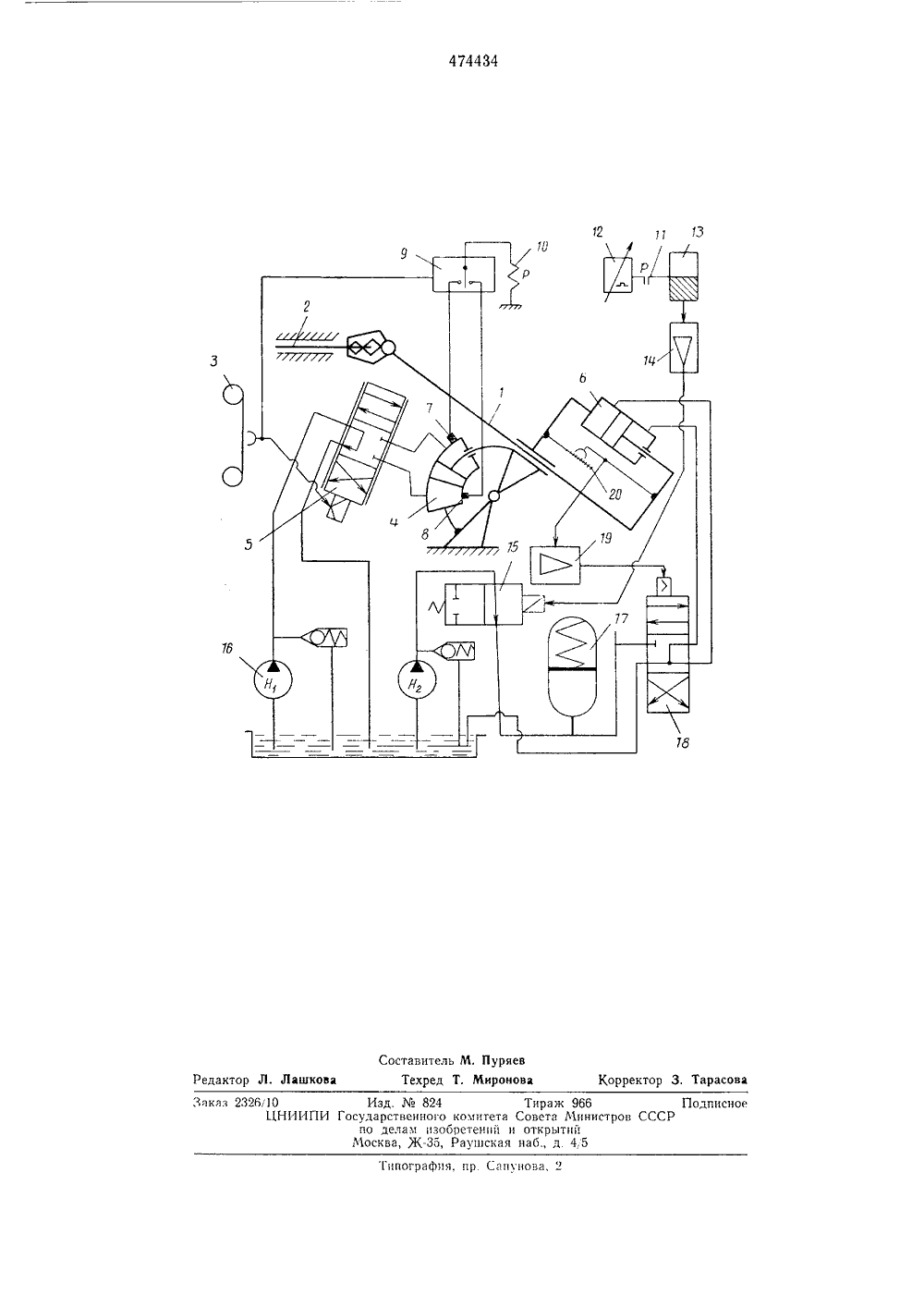
О П И С А Н И Е (11) 474434ИЗОБРЕТЕ Н ИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(23) ПриоритетОпубликовано 25.0 овета Министров СССпо делам изобретений 53) УДК 62-229оллетень23 и отнрытн ата опубликования описания 23.09) СИСТЕМА УПРАВЛЕНИЯ ПРОМЫШЛЕННЬ РОБОТОМ-МАНИПУЛЯТОРОМИзобретение относится к ооласти машиностроения.Известны системы управления промышленным роботом-манипулятором, состоящие из программного устройства, электрогидравлических золотников управления каждым приводом и датчиков положения звеньев промышленного робота-манипулятора в цепи обратной связи. Для обеспечения возможности манипулирования объектами, на которые наложены внешние связи, программируют движения стольких приводов (кроме привода схвата), сколько степеней свободы имеет кинематическая цепь основание в объект в манипулятор, а остальные приводы отключают от источников питания, обеспечивая свободу их перемещений, либо переводят в режим автоматической компенсации сопротивлений в кинематической цепи и приводах,Однако такие системы и способы управления характеризуются неполным использованием мощностей приводов промышленного робота-манипулятора, При этом может оказаться, что мощности программируемого привода недостаточны для перемещения объекта.Цель изобретения - использовать мощности непрограммируемых приводов при реализации движений робота-манипулятора, обеспечивая минимальную загрузку приводов, управляемых от программного устройства. Для этого система управления промышленным роботом-манипулятором содержит датчики изменения давления, установленные в полостях программируемых гидроприводов и 5 включаемые в цепь управления непрограммируемых приводов программным устройством поляризованного реле, обмотка которого запитывается от датчика изменения давления, генератор импульсов с регулируемой частотой 1 О и триггер, соединенные через контакты поляризованного реле, двухпозиционный электрогидрозолотник, положение которого определяется состоянием триггера, и аккумулятор давления, связанный с насосной станцией че рез двухпозиционный электрогидрозолотник ис непрограммируемым приводом - через трех- позиционный золотник, управляемый датчиком скорости непрограммируемого привода,На схеме приведен пример системы управ О ления для робота с двумя степенями свободы,работающего с объектом, имеющим одну степень свободы (перемещение скалки в направляющих).Система управления содержит робот-мани пулятор 1, объект 2, на который наложенывнешние связи, программное устройство 3, программируемый привод 4, золотник 5 управления программируемого привода, непрограммируемый привод 6, датчики 7 и 8 изме нения давления, устройство 9 включения лат 474434чика изменения давления в цепь управления непрограммируемого привода, обмотку 10 поляризованного реле, его контакты 11, генератор 12 импульсов с регулируемой частотой, триггер 13, усилитель 14, двухпозиционный электрогидрозолотник 15, насосную станцию 16, аккумулятор давления 17, трехпозиционный золотник 18, усилитель 19, датчик 20 скоросчи непрограммируемого привода.Система управления работает следующим образом.Сигналы программного устройства 3, характеризующие траекторию и скорость движения схвата робота-манипулятора 1, отрабатываются программируемым приводом 4 с помощью золотника 5 и датчиков положения обратной связи (на схеме не показаны). При этом объект 2 перемещается в соответствии с наложенными внешними связями. В полостях программируемого привода 4 установлены датчики 7 и 8 изменения давления. От программного устройства 3 в цепь управления непрограммируемого привода 6 устройством 9 включается датчик изменения давления, находящийся в полости нагнетания гидропривода 4. Сигнал этого датчика запитывает обмотку 10 поляризованного реле, контакты 11 которого срабатывают только при возрастании давления в полости нагнетания привода 4. Если же давление в полости нагнетания уменьшается (а это означает, что мощность непрограммируемого привода 6 используется для выполнения полезной работы и направлена на уменьшение нагрузки в приводе 4), то контакты 11 реле разомкнуты и тем самым фиксируется положение золотника 15, а управление приводом 6 осуществляется трехпозиционным золотником 18 от датчика 20 скорости через усилитель 19.При возрастании давления в полости нагнетания привода 4, свидетельствующем о том, что мощность непрограммируемого привода не идет на выполнение полезной работы, срабатывают контакты 11 поляризованного реле, триггер 13 переходит в другое устойчивое состояние, обеспечивая усилителем 14 переключение двухпозиционного золотника 15. Двухпозиционный золотник 15 в первом положении подключает насосную станцию 16 кцепи питания непрограммируемого привода 6,в которую включен аккумулятор давления 175 с линейной характеристикой, например, пружинный, Насосная станция 16 обеспечиваетбольший расход, чем необходимо для осуществления движения непрограммируемого привода 6, и поэтому в данном положении золот 10 ника 15 аккумулятор 17 давления взводится,и давление в цепи питания нерегулируемогопривода растет.Во втором положении золотника 15 насосная станция 16 отключена, непрограммируе 1 в мый привод 6 питается аккумулятором давления 17, который разряжаясь, уменьшает давление в цепи.Частота генератора импульсов 12 должнабыть отрегулирована так, чтобы за период20 между двумя импульсами система успела среагировать на изменение давления в нерегулируемом приводе,Предмет изобретения 25Система управления промышленным роботом-манипулятором, включающим программируемые и непрограммируемые приводы, состоящая из программного устройства и дат чиков положения звеньев робота-манипулятора в цепи обратной связи, отличающаяся тем, что, с целью обеспечения манипулирования объектами с внешними связями при минимальной нагрузке в программируемых при водах, она снабжена цепью управления непрограммируемых приводов, состоящей из датчиков давления, установленных в полостях программируемых гидроприводов и выходы которых через поляризованное реле, ге нератор импульсов с регулируемой частотой,триггер, усилитель, двухпозиционный электрогидрозолотник, насосную станцию с гидро- аккумулятором и трехпозиционный золотник соединены с непрограммируемым гидроприво дом, причем гидропривод снабжен датчикомскорости, управляющим трехпозиционным золотником.474434 Составитель М. Пуряевактор Л. Лашкова Техред Т. Миронова Корректор 3. Тарасов Закан 232610ЦНИИ Подписи Гппографпи, пр Сапунов Изд.824 Государственного комитета по делам изобретений и Москва, Ж, Раушская
СмотретьЗаявка
1949248, 30.07.1973
ГОСУДАРСТВЕННЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ МАШИНОВЕДЕНИЯ
КОБРИНСКИЙ АРОН ЕФИМОВИЧ, КОРЕНДЯСЕВ АЛЬФРЕД ИВАНОВИЧ, САЛАМАНДРА БОРИС ЛЬВОВИЧ, ТЫВЕС ЛЕОНИД ИОСИФОВИЧ
МПК / Метки
МПК: B25J 3/04
Метки: промышленным, роботом-манипулятором
Опубликовано: 25.06.1975
Код ссылки
<a href="https://patents.su/3-474434-sistema-upravleniya-promyshlennym-robotom-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления промышленным роботом-манипулятором</a>
Привод модуля промышленного робота

Номер патента: 1349999
Опубликовано: 07.11.1987
МПК: B25J 9/14
Метки: модуля, привод, промышленного, робота
...3 управляется, например, с помощью электромагнитов, обмотки которых соединены с контактами программного устройства или путевых включателей (не показаны). женное на чертеже, и перекрывает все магистрали. Поршень и исполнительный орган продолжают движение вправо под действием сил инерции. Во время этого движения штоковая полость силового цилиндра 1 заполняется рабочей средой из емкости 6 через обратный клапан 5, а рабочая среда из поршневой полости вытесняется через обратный клапан 7 в аккумулятор 9,заряжая его. В результате сжатия упругого элемента аккумулятора 9 (газа или пружины) увеличивается давление в поршневой полости и соответственно сопротивление перемещению поршня, что приводит к остановке поршня и связанного с ним...
Привод модуля промышленного робота

Номер патента: 960005
Опубликовано: 23.09.1982
Авторы: Голявин, Дежуров, Шаршов
МПК: B25J 9/00
Метки: модуля, привод, промышленного, робота
...полностьюоткрыты. При подаче сигнала от системы960005 формула изобретения СоставиТехред А.Тираж 10Государственелам изобретесква, Ж - 35,Патент, г. У ель И. ПащенкБойкас Редактор Н. БобковаЗаказ 6840/19 Коррек7 Подписноеого комитета СССРий и открытийРаушская наб., д. 4/5жгород, ул. Проектная,тор Г. Огар ВНИИПИпо113035, Милиал ППП ленного робота на воздухораспределитель 2, сжатый воздух поступает в поршневую полость пневмоцилиндра и сбрасывается из штоковой полости. Поршень пневмоцилиндра начинает движение (на чертеже влево), При подаче сжатого воздуха (по команде5 от СПУ) в управляющую полость Б плунжер 4 перекрывает магистраль выхлопа и сжатый воздух через отверстие 8 поступает в штоковую полость пневмоцилиндра 1, образуя воздушную...
Привод исполнительного органа робота

Номер патента: 1122501
Опубликовано: 07.11.1984
Автор: Павленко
МПК: B25J 9/00
Метки: исполнительного, органа, привод, робота
...штоком силового цилиндра и взаимо действующая с регулируемыми упорами винта, при этом на винте между опо" рами установлено демпфирующее устройство и храповой механизм, выполненный в виде храповика, жестко связан ного с винтом, и собачек, снабжен дополнительным приводом перемещения собачки храпового механизма, а демпфирующее устройство выполнено в виде группы пружин, размещенных с двух сторон винта.На фиг. 1 показан предлагаемый привод исполнительного органа робота; на фиг. 2 - то же, вид сбоку.Привод робота состоит иэ неподвижного цилиндра 1 и подвижного штока 2, к которому с пбмощью пластины 3 присоединена штанга 4 с упором 5. (Могут быть варианты конструкций приводов роботов, в которых к штоку присоединяется две и больше подвижных...
Многоканальное устройство для программного управления манипулятором

Номер патента: 1226408
Опубликовано: 23.04.1986
Авторы: Варгин, Михин, Пищугин, Рябушкин, Ткаченко
МПК: G05B 19/00
Метки: манипулятором, многоканальное, программного
...ЭКВИВАЛЕНТНОСТЬ 7 всех регулируемых координат, так как состояния45приводов 5 и их датчиков 6 положениясоответствуют выдаваемым регистром 2 командам на манипулятор.Наличие сигналов логической ."1"на входах элемента И 3 вызывает появ Оление такого же сигнала на его выходе, Логическая "1" с выхода элементаИ 3 поступает на вход счетчика 4 ион, воздействуя на блок 1, переключает программу на следующий кадр. Так Ыкак в новом кадре программы существуот команды, которые еще не отработаныманипулятором, то на входах соответствующих элементов ЭКВИВАЛЕНТНОСТЬпоявляются сигналы разных уровней и на их выходах имеются сигналы ло 1 игического 0 , которые запрещают логическим "0 с выхода элемента И 3 работу счетчика 4 импульсов, удерживая программу на...
Система контурного программного управления манипулятором
Номер патента: 620368
Опубликовано: 25.08.1978
Авторы: Агапов, Кнауэр, Копытин
МПК: B25J 9/00
Метки: контурного, манипулятором, программного
...12; коммутатор 13; блок управления 14 и инвертор 15.Система работает следующим образом.В режиме обучения выдается управляющий сигнал на привод 11 и охват манипулятора помещается последовательно в опорные точки по траектории, перемещения. С помощью устройства 1 записи программы, коммутатора 13 и блока управления 14 показания датчиков положения 12 и масштаб, (отношение длины программируемого отрезка к еди" ничному отрезку) последовательно поступают в блок памяти 2.При обучении оператор разбивает траекторию перемещения схвата мани" пулятора на единичные отрезки и проводит обучение манипулятора по полу" ченным точкам. На прямолинейных участках траектории можно исключить промежуточные точки, но записать в программе количество отрезков,...
Предыдущий патент: Электромеханический ключ
Следующий патент: Очувствленный робот
Случайный патент: Аппарат для выращивания железобактерий