Цикловая система программного управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
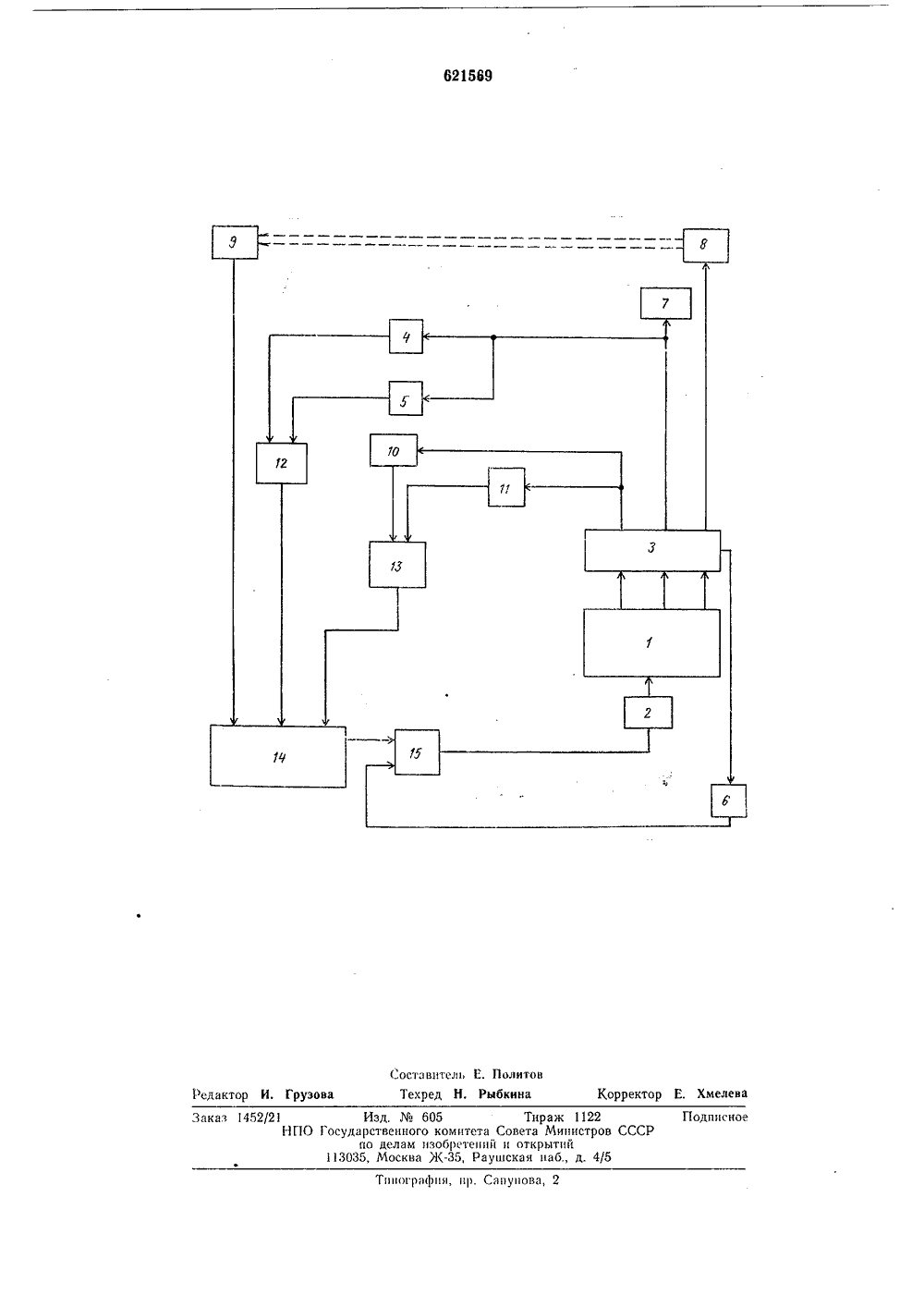
Союз Советских Социалистических Республик(51) М. Кл 2 В 2539/00 аявкиприсоединением Совета Министрав СССРло делам изобретений(71) Заявител КЛОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ(5 2 ет в функцпараллельн ГосУдарственный комитет (23) Приоритет Изобретение относится к области программного управления промышленными роботами и может быть использовано при создании цикловых систем программного управления промышленным роботом.Известны цикловые системы программного управления манипулятором, Система 1 Ц, содержащая программоноситель, временной генератор, устройство формирования транспортирующих и ориентирующих команд, изза накопления временной ошибки обладает низкой надежностью при работе с технологическим оборудованием.Наиболее близким техническим решением к изобретению является система 2, содержащая последовательно соединенные коммутатор, блок памяти, блок считывания, привод и датчик транспортирующих координат. Второй выход блока считывания подключен непосредственно к приводу ориентирующих координат и через первый инвертор и блок задержки к соответствующим входам первого элемента ИЛИ, третий выход блока считывания через второй инвертор соединен с первым входом второго элемента ИЛИ, второй вход которого подключен к выходу датчика технологических команд,Эта система работа ии времени и управляется по о поступающим сигналам с транспортирующих и ориентирующих координат манипулятора и технологических команд, что снижает быстродействие и надежность системы.5 Цель изобретения - ,повышение быстродействия и надежности системы.Для этого система содержит элемент И ипоследовательно соединенные устройство ускоренного прохода координат и третий10 элемент ИЛИ, выход которого подключенк входу коммутатора, входы элемента И соединены соответственно с выходами датчика транспортирующих координат, первого и второго элементов ИЛИ, выход элемента И15 подключен к второму входу третьего элемента ИЛИ, а вход устройства ускоренного прохода координат соединен с одним из выходов блока считывания.На чертеже представлена структурная 20 схема системыОна содержит блок 1 памяти, коммутатор 2, блок 3 считывания, первый инвертор 4, блок 5 задержки, устройство 6 ускоренного прохода координат, привод 7 ориентирующих координат, привод 8 транспортирующих координат, датчик 9 транспортирующих координат, датчик 10 технологических команд, второй инвертор 11, первый 12 и второй 13 элементы ИЛИ, элемент И 14,30 третий элемент ИЛИ 15.3Цикловая система программного управления манипулятором работает следующимобразом.Для перехода программы в блоке 1 памяти со строки на строку на коммутатор 2 5должны поступать сигналы О - 1. При отсутствии сигналов программы с блока памяти на элемент И 14 должны приходитьсигналы- 1,Таким образом, если блок 1 памяти вы. 10дает сигнал 1 по каналу транспортирующих координат, то через блок 3 считываниявключается привод 8 транспортирующихкоординат. Рабочий орган транспортирующих координат начинает двигаться, и датчик 9 транспортирующих координат, размыкаясь, выдает нулевой сигнал на элемент И14. Следовательно, на коммутатор 2 поступает сигнал 0. По окончании движениярабочего органа манипулятора, датчик 9 20транспортирующих координат, замыкаясь,выдает единичный сигнал на элемент И 14.Сигнал 1 подается в коммутатор 2, который коммутирует новую строку программы блока памяти. 25В случае появления единичного сигналана входе блока 1 памяти по каналу ориентирующих координат, блок 3 считываниявключает привод 7 ориентирующих координат и посылает сигнал 1 на инвертор 4 иблок 5 задержки и далее через элементИЛИ 13 на элемент И 14 поступает сигнал О. Следовательно, на коммутатор 2выдается сигнал О. Привод 7 ориентирующих координат отрабатывает ориентирую- З 5щую координату. По истечении времениблок 5 задержки включается и на его входеобразуется О, следовательно, на элементеИ 14 появляется - 1 и на коммутатор 2также подается единичный сигнал, 40Если блок памяти выдает сигнал 1 поканалу технологических команд, то на элемент ИЛИ поступают сигналы О с инвертора 11 и с датчика 10 технологическихкоманд. 45Таким образом, на элемент И 14, а следовательно, и на коммутатор 2 проходит сигнал О.После обработки технологическим оборудованием рабочей операции датчик 10 технологических команд замыкается и посыла 4ет на элемент ИЛИ 12 сигнал 1, На элементе И 14 и на коммутаторе 2 появляется сигнал 1. При наличии в программе кадра команды на ускоренный проход единичный сигнал через время, обусловленное параметрами устройства 6 ускоренного прохода, поступает на элемент ИЛИ 15. В результате происходит переход коммутатора 2 на следующий кадр программы независимо от состояния элемента И 14.Применение изобретения позволит значительно повысить быстродействие и надежность цикловой системы программного управления манипулятором,Формула изобретенияЦикловая система программного управления манипулятором, содержащая последовательно соединенные коммутатор, блок памяти, блок считывания, привод и датчик транспортирующих координат, второй выход блока считывания подключен непосредственно к приводу ориентирующих коорди,- нат и через первый инвертор и блок задержки к соответствующим входам первого элемента ИЛИ, третий выход блока считывания через второй инвертор соединен с первым входом второго элемента ИЛИ, второй вход которого подключен к выходу датчика технологических команд, отл ич аю щ а я с я тем, что, с целью повышения быстродействия и надежности, система содержит элемент И и последовательно соединенные устройство ускоренного прохода координат и третий элемент ИЛИ, выход которого подключен к входу коммутатора, входы элемента И соединены соответственно с выходами датчика тр анспортирующих коор. динат, первого и второго элементов ИЛИ, выход элемента И подключен к второму входу третьего элемента ИЛИ, а вход устройства ускоренного прохода координат соединен с одним из выходов блока считывания.Источники информации,принятые во внимание при экспертизе 1. Патент СШЛ3572519, кл. 214 в , 1972.2. Тес 1 ш 1 са 1 с 1 езсг 1 р 11 оп Орега 1 шд ш з 1 гцс 11 опз Н 1 Ьо 1 гподе 1КВ 50,621569 Составитель Е. Политов Техред Н. Рыбкина Корректор Е. Хмелева Редактор И. Грузова Подписное Типогр;и 1 пи, пр. Сапунова, 2 Заказ 1452/21 Изд. Ма 605 Тираж 1122 НПО Государственного комитета Совета Министров СССР по делам иаобрстеиии и открытий 113035, Москва Я(-35, Раушская иаб., д. 4/5
СмотретьЗаявка
2381959, 02.07.1976
ПРЕДПРИЯТИЕ ПЯ Р-6930
МАЙСКИЙ АНАТОЛИЙ ИВАНОВИЧ, КНАУЭР ИГОРЬ БОРИСОВИЧ, ШОР ВИКТОР ВАЛЕНТИНОВИЧ, ЧУМАКОВ АЛЕКСАНДР НИКОЛАЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятором, программного, цикловая
Опубликовано: 30.08.1978
Код ссылки
<a href="https://patents.su/3-621569-ciklovaya-sistema-programmnogo-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Цикловая система программного управления манипулятором</a>
Устройство для записи информации в блок программируемой постоянной памяти

Номер патента: 955195
Опубликовано: 30.08.1982
Авторы: Поляшов, Соболев, Суворов
МПК: G11C 17/00, G11C 7/00
Метки: блок, записи, информации, памяти, постоянной, программируемой
...такты;Т - начало записи кода а в блокпамяти, 25Т, - конец записи кода О;временной интервал непосредственно записи в блокпамятиУстройство работает следующим об разомо Процесс записи информации в блок памяти можно разбить,на два этапа: первый этап - этап ожидания или этап подготовки информации, когда происхо дит смена адреса и данных, подлежащих записи, и второй этап - этап непосред" ственно работы устройства, который ,состоит из а рабочих тактов, а каждый такт, в свою очередь, подразделя ется на два временных интервала: первый - считывание из блока памяти и второй - запись в блок памяти.На этапе подготовки устанавливается необходимый адрес Ь на выходе ком" 45 мутатора 8 и данные с на выходе блока 1 (Фиг,2),В момент Т с выхода блока 1...
Устройство для функционального контроля цифровых блоков

Номер патента: 1656538
Опубликовано: 15.06.1991
Авторы: Барышев, Ваганов, Дерендяев, Кибзун, Лисицын, Маслов, Мельников
МПК: G06F 11/16
Метки: блоков, функционального, цифровых
...5 это слово запишется в ОЗУ 10 субблока 21 по очередному адресу и т.д, Запись информации в субблок 21 блока 2 буферной памяти продолжается до тех пор, пока состояние счетчика 20 тест-наборов не станет равно содержимому регистра 23, В случае равенства нэ выходе схемы 21 сравнения блока 5 появится импульс, который запретит работу генератора 22 и установит счетчик 20, регистр 25 и регистр 23 в нулевое состояние. Далее в регистр 25 от блока 1 заносится адрес очередного канала, а в регистр 23 - номер последнего загружаемого тестового слова в субблок блока 2 выбранного какала. Загрузка очередного субблока блока 2 происходит аналогично предыдущему и т.д., пока не загрузятся все необходимые для данного ОК субблоки блока 2 буферной памяти,...
Блок коррекции развертки для устройства считывания графической информации

Номер патента: 1310861
Опубликовано: 15.05.1987
Авторы: Купреев, Павленко, Шаройко
МПК: G06K 11/00, G06K 7/14
Метки: блок, графической, информации, коррекции, развертки, считывания, устройства
...входах счетчика. Запись указанного кода в счетчик 4 осуществляется импульсом, поступающим на его вход предварительной установки с выхода элемента 6 ИЛИ.Код числа Р формируется узлом 3 задания толщины носителя, представляющего собой комбинационный преобразователь. Он может быть выполнен с использованием микросхем мультиплексоров. Управление узлом 3 задания толщины носителя осуществляется с помощью входящих в его состав органов ручного управления.Код числа Р передается на информационные входы счетчика 4 импульсов через преобразователь 8 кода,Преобразователь 8 кодов при наличии сигнала на его втором (управляющем) входе осуществляет обращение кода числа Р.При отсутствии управляющего сигнала преобразователь кода передает число Р без...
Устройство для сбора и регистрации данных о работе информационно-вычислительной системы

Номер патента: 978155
Опубликовано: 30.11.1982
Авторы: Волошин, Лутович, Семенков
МПК: G06F 11/34
Метки: данных, информационно-вычислительной, работе, регистрации, сбора, системы
...режим регистрации временной диаграммы работы системы, режим формирования интегральных отчетов о работе устройств, узлов и блоков исследуемой ВС, режим регистрации накладных расходов ОС, режим трассировки кодов команд.Режим временной диаграммы (ВД) .Перед началом работы устройства пользователь должен подсоединить зонды к определенным точкам исследуемой ВС, идентифицирующим изменение состояний интересующих его блоков, узлов или устройств систеьы, включить питание устройства и произвести его начальную установку путем задания требуемого режима и проведения общего сброса с пульта 20 уп": равления блока 3 управления устройства.Кроме того, с пульта 20 управления блока 3 управления устройства задается требуемая частоты выборки, определяющая...
Устройство для определения коэффициента запаса устойчивости колесной пары против схода с рельсов

Номер патента: 1144125
Опубликовано: 07.03.1985
МПК: G06G 7/48
Метки: запаса, колесной, коэффициента, пары, против, рельсов, схода, устойчивости
...содержит генератор 1 тактовых импульсов, имитатор 2 входных сигналов, шифратор 3, аналого-цифровой преобразователь 4, 40 дешифратор 5, блок 6 долговременной памяти, коммутатор 7, блок 8 памяти, блок 9 регистрации, усреднитель 10, арифметический блок 11, блок 12 управления, содержащий датчик 13 45 скорости транспортного средства, датчик 14 поворота тележки, датчик 15 кодов служебных признаков, пер; вый 16, второй 17 и третий 18 од, новибраторы, лентопротяжный меха низм 19, переключатель 20 режимов работы, первый 21 и второй 22 , триггеры, первый 23 и второй 24 элементы И, коммутатор 25 импульсов с:ходами 26 и 27 и выходами 28 и 55 . 29, третий триггер 30, счетчик 31 импульсов и узел 32 памяти, блок определения интервалов...
Предыдущий патент: Промышленный робот
Следующий патент: Устройство для программного управления промышленным роботом
Случайный патент: Устройство для реостатного торможения автономного локомотива