Цикловая система программного управления манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
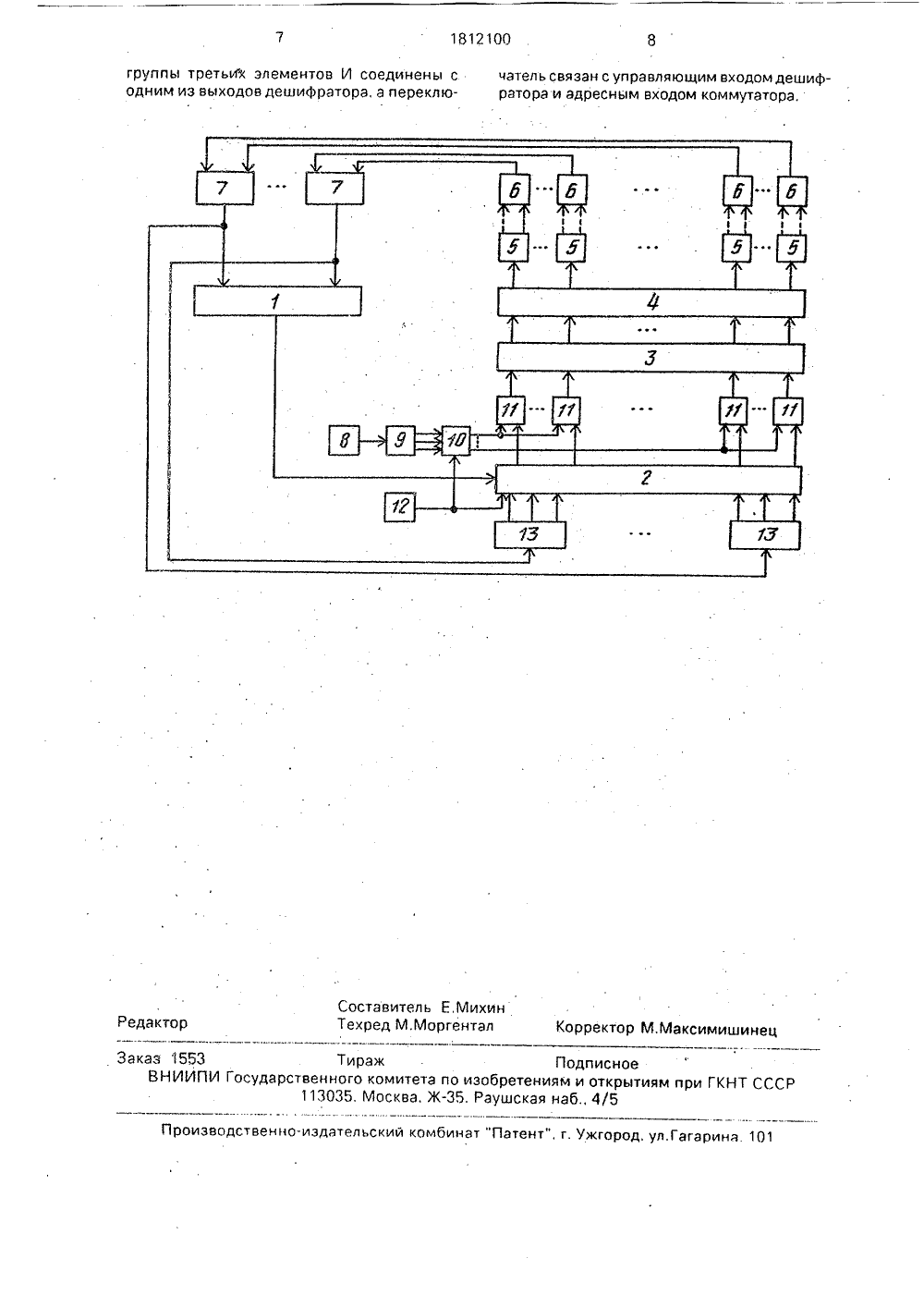
сОюЗ сОВЕтскихСОЦИАЛИСТИЧЕСКИРЕСПУБЛИК 1812100 3/00, 9 1)5 СУДАРСТВЕННОЕ ПАТЕНТНОДОМСТВО СССРСПАТЕНТ СССР)(ГООПИСАНИЕ ИЗОБРЕТЕ ЕТЕЛЬСТ ОМ К АВТ бжен оедьсо управления сна следовательно тактовых импу дешифратором ков позициони элементами И, пами третьих э каждой группы связаны чере элемент И с пе соответствующ ды которого че входы коммута ствующей груп ключены к бл входы каждой соединены с од ра, а переключ входом дешиф коммутатора. 1 приводы 5, датчики 6 позиционирования, вторые элементы И 7, генератор 8 тактовых импульсов, первый счетчик 9, дешифратор 10, третьи элементы И 11, переключатель 12, вторые счетчики 13.Первый элемент И 1 последовательно соединен через первый информационный вход коммутатора 2 с первыми входами третьих элементов И 11, блоком 3 памяти, блоком 4 считывания, приводами 5, датчиками позиционирования 6, вторыми элементами И 7, ВыхОды которых сВязаны со Входами первого элемента И 1 и через вторые счетчики 13 со вторыми информационными входами коммутатора 2, адресный вход которого подключен к выходу переключатеемент, комму считывания,та(54) ЦИКЛОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ(57). Использование: в машиностроении, например при автоматизации механообрабатывающего оборудования. Сущностьизобретения: цикловая система программного управления манипулятором содержитэлемент И, выход которого соединен с первым информационным входом коммутатора,блок памяти, последовательно соединенный с блоком считывания, приводами, датиками позиционирования, Систем Изобретение относится к робототехнике, в частности к устройствам управления роботами, и может найти широкое применение при автоматизации различных технологических операций,Цель изобретения- расширение функциональных возможностей цикловой системы программного управления манипулятором путем обеспечения независимогоуправления отдельными группами приводов.На чертеже изображена функциональная схема предлагаемой цикловой системы программного управления,Она содержит первый элтор 2, блок 3 памяти, блок а переключателем и пос иненными генератором л в, первым счетчиком и , а отдельные группь 1 датчирования снабжены вторыми вторыми счетчиками и груплементов И, При этом выходы датчиков позиционирования з соответствующий второй рвым элементом И и входом его второго счетчика, выхорез вторые информационные тора и первые входе соответпы третьих элементов И подоку памяти, причем вторые группы третьих элементов И Я ним из выходов дешифратоатель связан с управляющим ратора и адресным входом3 1812100 4Переключатель 12 представляет собой,например, тумблер или кнопку с памятью,Остальные элементы известны и описаны в различной справочной литературе,Цикловая система программного управ-. ления манипулятором работает следующим образом; в зависимости от состояния переля 12 и к управляющему входу дешифратора 10, генератор тактовых импульсов 8 последовательно соединен с первым счетчиком 9 и дешифратором 10.Коммутатор 2 .может представлять собой, наприМер, микросхему двоичного счетчика серии К 155 ИЕ 7, в этом слуцае, первый ключателя 12 устанавливается первый или информационный вход коммутатора будет второй режим работы. При первом режиме работы блокировано прохождение инфорсчетным входом счетчика, вторые инфорМационные входы коммутатора - входь 1 парал- "0 мации со вторых, счетчиков 13 через вторые лельной записи числа в счетчик, а адресный гих микросхем памяти с различными всех его выходах устанавливаются уровни способами записи ихранения информации,. логицеской единицы, разреаая прохождеБлок считывания 4 может, состоять. йз ниечерез все третьи элементы И 11, микросхем, функционально выполняющих 20 Код первого кадра программы поступароль триггеров, например, микросхемы се- ет йэ коммутатора 2 через третьи элементы рии К 155 ТМ 2, у которых входы К и Я под- И 11 на блок памяти 3, на выходе которого ключены к блоку памяти, а выходы О и 0 кпоявляется информация об отработке треисполнительным элементам, : буемой степени подвижности. Эта инфорПривод 5 можетпредставлятьсобойна мация заносится в блок считывания и пример, широкий класс гидро- и пневморас-поступает на соответствующий прйвод 5, пределителей, которые с одинаковым исполнительньгйэлементкоторагоначинает успехом"можно испольэовать как для управ-двигаться и освобождает датчик позициониления степенями подвижности манипулято- рования 6 от своего воздействия,ра., так и для управления технологической 30 . С датчика йозиционирования 6 поступаоснастки, При подаче электрического сигна- ет уровень логического 0 через вторые алела наэлектромагнит пйевМораспределите- менты И 7 и первый элемейт.И 1 на первый ля исполнительный элемент привода, информациойныйвход коммутатора 2, блонапример, шток цилиндра движется в одну кируя.измененйе кода кадра программы на сторону, а при снятиинапряжения с катуш его выходе. Па мере выхода, исполнительки электромагнита пневмораспределитель ного элемента привода 5 в запрограммивозвращаетсяв"исходноеположениеищток. рованную точку происходит повторное цилиндра движется в обратную сторону, воздействие его на датчик позиционироваДатцики позиционирования 6, напри- ния 6, с которогО при срабатывании постумер, могут быть как контактными, механиче пает уровень логической единицы. Эта ского воздействия, так и бесконтактными, логицеская единица поступает на первый например, ВКБ,: .информационный .вход коммутатора 2 иГейератор тактовых импульсов 8 выпол-изменяет код на его выходе, который соотнен, например, на логических Элементах се- " ветствует второму кадру программы. Обрарии К 155 с резистивно-емкостной обратной 45. ботка второго кадра происходит аналогично связью, На выходе этих элементов с фикси- вышеописанному циклу.рованнай частотой появляются прямоуголь- Во втором режиме работы на выходе ные импульсы,переключателя 12 изменяется логическийСчетчики 9 и 13 представляют собой уровень, в результате чего коммутатор 2 двоичные счетчики и могут быть выполнены, 50 блокируется от приема информации по пернапример, в качестве самостоятельных мик- вому информационному входу, но переклюросхем различных серий, например, чается на прием информации по вторымК 155 ИЕ 6. информационным входам, а дешифратор 10Дешифратор 10 выполнен, например, в начинает свою работу, периодически выдавите. самостоятельной схемы К 155 ИДЗ с инвая на каждый свой выход уровень логичеверсией выходных сигналов с помощью ло- ской единицы, тем самым разрешая гических элементов, а также может быть, поочередное прохождение информации чевыполнен на микросхеме К 155 РЕЗ с предва-, рез определенную группу третьих элеменрительным программированием необходи- тов И 11. В этом случае возможно мых состояний, независимое управление отдельными групвход коммутатора- входразрешения запи-информационные входы коммутатора 2, но еи йнформации через эти входы. разрешвно прохождение информации поБлок памяти 3 может быть выполнен,его первому информационному входу, поднапример, на микросхеме К 155 РЕЗ или мо клюценному к первому элементу И 1, Работа жет представлять собой набор любых дру- дешифратора10 также блокирована, на5 10 20 единяется в одну группу, а управление другой рукой - в другую группу, Использование такого принципа управления можно перенерудованием или оснасткой, отведя для этого25 при возможности одну из групп приводов 30 венно повышает надежность, снижает сро . ки .внедрения роботов, упрощаетобслуживание, снижает затраты на изготовление комплекса и т,д. 35 40 50 пами приводом 5, которые собраны в группы, например, по следующим критериям; управление степенями подвижности первойруки манипулятора, управление степенямиподвижности второй руки манипулятора. уп-:равление технологической оснасткой и т.д.Цикл обработки каждой, предваритель,но запрограммированной, группы приводовследующий: изначально каждый второйсчетчик 13 через коммутатор 2 подает напервые входы третьих элементов И 11 кодыпервых кадров программ;В момент выдачи уровня логическойединицы на вторые входы первой группытретьих элементов И 1 из дешифратора 10информация соответствующего второго счетчика 13 поступает на часть адресных входовблока памяти 3, на остальных адресных входах блока памяти 3 в это время присутствуютфиксировайные уровни логического нуля.Согласно поступившему коду первогокадра программы для первой группы степеней подвижности информация из блока па-мяти 3 заносится вблок 4 считывания, а изнего поступает на привод 5 этой группы,Происходит отработка запрограммированной степени подвижности, датчик позиционирования б дает как и в первом режимепоочередно уровень логического нуля, затем уровень логической единицы.Эти уровни поступают через соответствующий второй элемент И 7 на вход соответствующего второго счетчика 13, в которомизменяется выходной код и теперь он соответствует второму кадру программы дляданной группы степеней подвижности, Пока шла отработка степени подвижности изпервой группы дешифратор 10 выдает уровень логической единицы на вторые входыследующей группы третьих элементов И 11,пропуская код первого кадра программы .следующего второго счетчика 13 к блоку памяти 3, информация от остальных вторыхсчетчиков 13 не поступает к блоку памяти,На соответствующем адресном пространстве блока памяти 3 появляется кодпервого кадра программы для следующейгрулпы степеней подвижности, на остальных адресных входах блока памяти 3 - фиксированные уровни логического О, Из блокапамяти 3 через блок считывания 4 информацияоб обработке соответствующей степени подвижности в данной группе поступает напривод 5, Информация из блока памяти 3на остальные группы степеней подвижности в этот момент времени не поступает, асохраняется в блоке считывания,Отработка происходит аналогично вышеописанному циклу с разницей в том, чтосигнал об окончании позиционирования поступает через соответствующий данной группе степеней подвижности второй элемент И 7 на соответствующий второй счетчик 13. Цикл отработки следующих групп степеней подвижности аналогичен, Вследствие большей скорости выдачи тактовых сигналов на вторые входы третьих элементов И 11 отработка каждой группы степеней подвижности практически происходит одновременно и не зависит друг от друга,Такой режим работы устройства целесообразно использовать там, где требуется,исходя из технологических требований, обслуживание роботом нескольких единиц15 оборудования, Например, при обслуживании двух конвейерных систем, на которых появление деталей не синхронизировано и носит случайный характер. В этом случае управление одной рукой манипулятора обьсти и на управление технологическим обоманипулятора. В этом случае система управления манипулятором превращается в систему управления роботизированным технологическим комплексом, что сущестФормула изобретенияЦикловая система программного управления манипуляторомсодержащая элемент И, выход которого соединен с первым информационным входом коммутатора,блок памяти, последовательно соединенный с блоком считывания, приводами, датчиками позиционирования, о т л и ч а ющ а я с я тем, что, с целью расширения функциональных возможностей путем обес печения независимого управления отдельными группами, приводов, она снабжена переключателем и последовательно соединенными генератором тактовых импульсов, первым счетчиком и дешифратором, а отдельные группы датчиков позиционирования снабжены вторыми элементами И, вторыми счетчиками и группами третьих элементов И, при этом выходы каждой группы датчиков позиционирования связаны через соответствующий второй элемент И с первым элементом И и входом соответствующего второго счетчика, выходы которого через вторые информационные входы коммутатора и первые входы соответствующей группы третьих элементов И подключены к блоку памяти, причем вторые входы каждой1812100 Составитель Е,МихинТехред М.Моргентал Корректор М тор ксимиши енно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 роизво группы третьиМ элементов И соединены с одним из выходов дешифратора, а переклюЗаказ 1553 Тираж ВНИИПИ Государственного комит 113035, Москвчател ь связан с управляющим входом дешифратора и адресным входом коммутатора,Подписноео изобретениям и открытиям при ГКНТ СС 5, Раушская наб 4/5
СмотретьЗаявка
4850193, 12.07.1990
МОСКОВСКИЙ АВТОМОБИЛЬНЫЙ ЗАВОД ИМ. И. А. ЛИХАЧЕВА
МИХИН ЕВГЕНИЙ МИХАЙЛОВИЧ, ПИЩУГИН ВИКТОР ГРИГОРЬЕВИЧ
МПК / Метки
МПК: B25J 13/00, B25J 9/00
Метки: манипулятором, программного, цикловая
Опубликовано: 30.04.1993
Код ссылки
<a href="https://patents.su/4-1812100-ciklovaya-sistema-programmnogo-upravleniya-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Цикловая система программного управления манипулятором</a>
Элемент ассоциативной памяти

Номер патента: 1127007
Опубликовано: 30.11.1984
Автор: Малышев
МПК: G11C 15/00
Метки: ассоциативной, памяти, элемент
...установки в единицу второго триггера, вход установки в20 нуль которого является шестым управляющим входом элемента, а прямой выход соединен с вторым входом четвертого элемента И и с первым входом четвертого элемента И-ИЛИ, второй вход которого подключен к первому . информационному входу элемента, третий и четвертый входы - к второму логическому входу элемента, пятый вход - к выходу второго элемента НЕ, шестой вход - к инверсному выходу второго триггера и третьему входу второго элемента И, а выход является вторым логическим выходом элемента.На фиг, 1 представлена функциональная схема предложенного элемента З 5 ассоциативной памяти; на фиг. 2 - структурная схема ассоциативной матрицы, составленной из этих элементов.Элемент ас"оциативной...
Устройство для выполнения операции “конъюнкция на три входа” на феррит-ферритовых логических элементах

Номер патента: 898619
Опубликовано: 15.01.1982
Авторы: Кочнев, Павлов, Шароватов
МПК: H03K 19/00
Метки: входа, выполнения, конъюнкция, логических, операции, три, феррит-ферритовых, элементах
...множество "0, + 1" его входных сигналов).П р и м е р 1. С тактовым импульсом первой фазы первого такта положительный сигнал передается по входнойшине 1 на первый входэлемента 6 и согласно логике работы (см.табл.1) в него записывается "+1"; зО импульсом второй фазы положительный сигнал с элемента 6 передается на второй (отрицательный) вход 13 элемента 11 и согласно логике работы (см,табл.2) в него записывается нулевая информация; импульсом третьей фазы с элемента 11 передается нулевой сигнал на вход приемного устройства 11.П р и м е р 2. С тактовым им пульсом первой фазы второго такта положительный сигнал передается по 9 4входной шине 2 на вторые входы 5 и 7 элементов 6 и 9 и записываются в них согласно логике работы (см.табл.1);...
Обучающее устройство

Номер патента: 989569
Опубликовано: 15.01.1983
Авторы: Александров, Зубко, Игнатьев
МПК: G09B 7/02
Метки: обучающее
...62; С формирователя 4 командные метки через элемент ИЛИ 199поступают в блок 5, который вырабаты"вает команды на включение и выключение элементов подсветки электри 989569выключения лампы кинопроектора блока 9, смены очередного диапозитивав диапроекторе блока 10, включенияи выключения лампы диапроектора блока 10., 5Сигнал включения кинопроектораблока 9 с формирователя 7 поступаетчерез элемент ИЛИ 31 на единичные входы триггеров 20 и 21. Эти триггерыустанавливаются в единичное состоя" 1 Оние, в результате чего срабатываютключи 16 и 17, включающие лентопротяжный механизм кинопроектора блока 9 в режим пуска. Триггер 21, кроме того, включает реле 22, на выхо-. 15де которого формируется сигнал, устанавливающий триггер 21 в...
Процессор быстрого преобразования фурье
Номер патента: 1086438
Опубликовано: 15.04.1984
Авторы: Вершков, Ветохин, Голубева, Парфенов, Прокошенков
МПК: G06F 17/14
Метки: быстрого, преобразования, процессор, фурье
...соединен с третьим входом девятого элемента ИЛИ и является пятнадцатым выходом блока управления, выходы семнадцатого, восемнадцатого элементов И и девятого элемента ИЛИ соединены соответственно с первым, вторым и третьим входами второго коммутатора, первый и второй выходы которого являются соответственно двенадцатым и тринадцатым выходами блока управления, первый выход дешифратора этапов является третьим выходом блока управления и подключен к входу третьего элемента НЕ, выход которого соединен с первым входом девятнадцатого элемента И, второй вход которого подключен к выходу четвертого эле"мента НЕ, вход которого соединен с выходом шестнадцатого элемента И, выход которого является вторым выходом блока управления, а выход девятнадцатого...
Устройство для преобразования кодов с одного языка на другой

Номер патента: 1088012
Опубликовано: 23.04.1984
Авторы: Богумирский, Яцук
МПК: G06F 17/27
Метки: кодов, одного, преобразования, языка
...групп элементов ИЛИ,причем признаковые входы коммутатора Осоединены соответственно с первымивходами элементов И первой группы,выходы которых соединены с входамиэлемента ИЛИ и с первыми входами эле"ментов И групп со второй по(п+1)-ую, 5вторые входы элементов И групп совторой по (и+1)-ую соединены с информационными входами коммутатора, управляющий вход коммутатора соединен свходом запуска генератора импульсов, 20выход которого соединен с тактовымвходом кольцевого сдвигающего регист-ра, первый выход которого соединенс входом останова генератора импульсов и с входом сброса счетчика, а 25остальные выходы кольцевого сдвига.ющего регистра соединены с вторымивходами элементов И первой группы,счетный вход счетчика соединен с выходом элемента ИЛИ,...
Предыдущий патент: Привод поступательного перемещения
Следующий патент: Губка для захвата хрупких деталей
Случайный патент: Шлюзовый затвор для пневматического питания сигаретных машин