Цикловая система управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
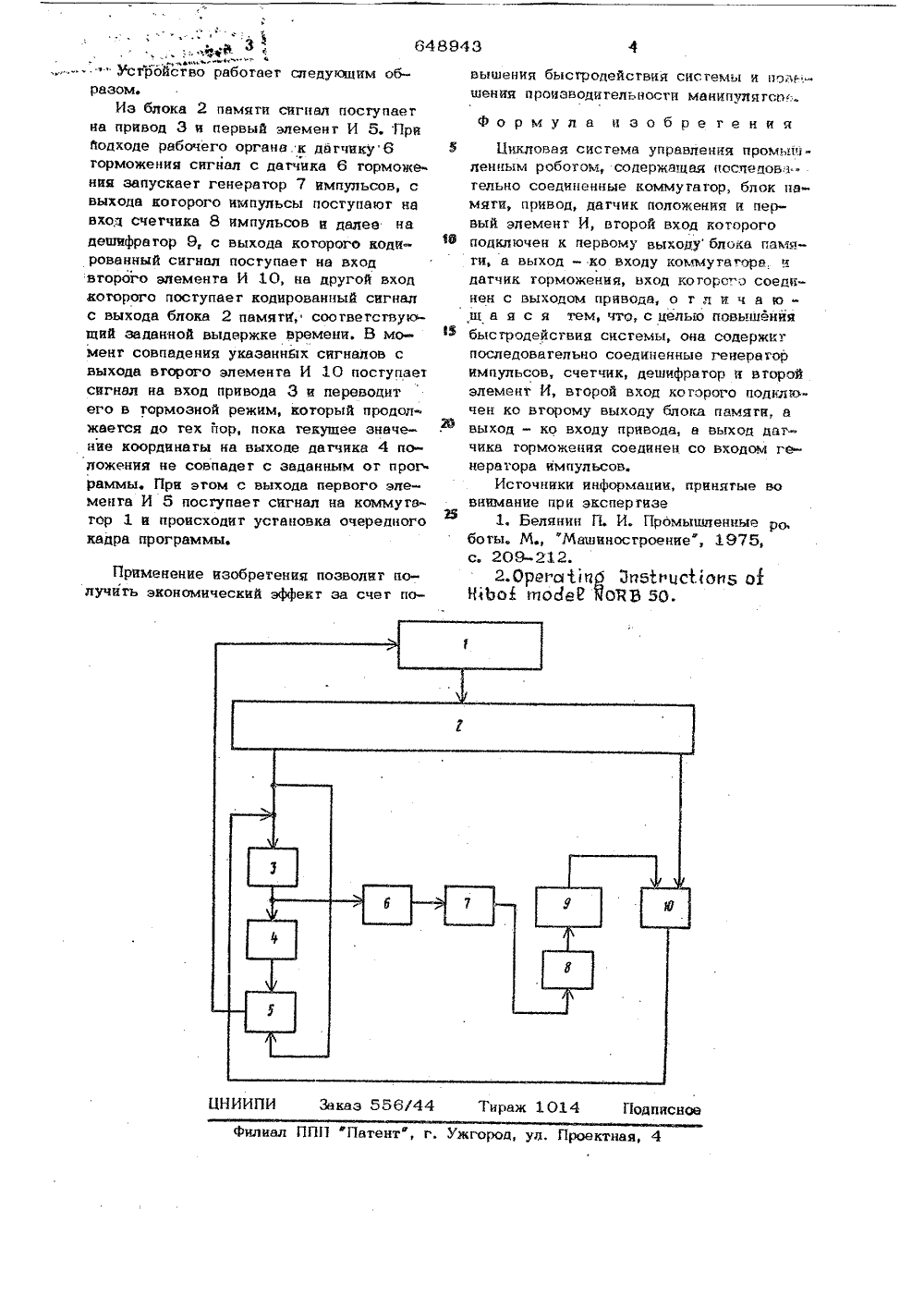
Союз СоветскихСоциалистическиРеспублик ЕН ЛЬ СУЗУ АВТОРСКОМУ СВИ/00 исоединением заявкисударстоеонье СССР о делам нэобретвиой а открытой.8 Дата опубликования описан В. В. Вор, М, М. Зверев, Г. С. ГавА. Чиганов и Е. К. Белов 72) Авторы изобретения,Б. Кн 1) Заявитель ВАЯ СИСТЕМА УПРАВ.ЧЕНРОМЫШЛЕННЫМ РОБОТОй 1 иональная схе вхо оммутатор 1 3, датчик 4 И 5, датчик 7 импульсов, горой элемен четИзобретение относится к роботогехике и может быть использовано при созании цикловых систем программного управления промышленным роботом.Известна цикловая система управления промышленным роботом, содержащаякоммутатор, блок памяти, приводы, датчик положения и элемент И 11 . Однако эта система не обеспечивает эффективного торможения привода при подходек заданной точке позиционирования,Наиболее близким техническим решением к изобретению является система,содержащая последовательно соединенные коммутатор, блок памяти, привод,датчик, положения и первый элемент И,15второй вход которого подключен к первому выходу блока памяти, а выход - коду коммутатора, и датчик торможения,вход которого соединен с выходом привода 121В известной системе включение тормозного реаама происходи г непосредственно по сигналу тормозного датчика,установленного стационарно и не учитывающего скорости подхода рабочего органа к точке позиционирования, что приводит к уменьшению быстродействия систем ыаЦелью изобретения является повышение быстродействия системы.1 Ьи этого система содержит последовательно соединенные генератор импульсов, счетчик, дешифратор и второй элемент И, второй вход которого подключен ко второму выходу блока памяти, а выход - ко входу привода, а выход датчика торможения соединен со входом генерагора импульсов,На чертеже дана фума системы.Система содержит кблок 2 памяти, приводжения, первый элементторможения, генераторчик 8, дешифратор 9, в10,3 ",. 6489%ЪИъ.Устройство рабогаег следующим образомеИз блока 2 памяти сигнал поступает на привод 3 и первый элемент И 5. При йодходе рабочего органа.к датчику 6 5торможения сигнал с датчика 6 торможения запускает генератор 7 импульсов, с выхода которого импульсы поступают нц вход счетчика 8 импульсов и далее на дешифратор 9, с выхода которого кодированный сигнал поступает на входвторого элемента И 10, на другой вход которого поступает кодированный сигнал с выхода блока 2 памягФ, соответствующий заданной выдержке времени. В момент совпадения указаннйх сигналов с выхода второго элемента И 10 поступает сигнал на вход привода Э и переводит его в тормозной режим, который продолжается до тех йор, пока текущее значение координаты на выходе датчика 4 положения не совпадет с заданным от про раммы. При этом с выхода первого элемента И 5 поступает сигнал на коммутатор 1 и происходит установка очередногоЖкадра программы. Применение изобретения позволит получить экономический эффект за счет повышения быстродействия системы и пэм-.шения производительности манипулягсос:. Формула изобрегеничЦикловая система управлении промышленным роботом, содержащая последов. тельно соединенные коммутатор, блок памяти, привод, датчик положения и первый элемент И, второй вход которого подключен к первому выходублока гакити, а выход - ко входу коммутатора, и датчик торможения, вход которо о соединен с выходом привода, о т л и ч а ющ а я с я тем, что, с целью повышйния быстродействия системы, она содержи последовательно соединенные генератор импульсов, счетчик, дешифратор и второй элемент И, второй вход которого подключен ко второму выходу блока памяти, а выход - ко входу привода, а выход датчика торможения соединен со входом генератора импульсов.Источники информации, принятые во внимание при экспертизе1. Белянин П, И. Промышленные ро, боты. М., Машиностроение, 1975, с. 209-212.2. ОРРГО б Ий Зй 51 РМСООИЬ 01В Ьо 1 щорсе Р МОИЗ БО.
СмотретьЗаявка
2552896, 01.12.1977
ПРЕДПРИЯТИЕ ПЯ Р-6930
КНАУЭР ИГОРЬ БОРИСОВИЧ, ШОР ВИКТОР ВАЛЕНТИНОВИЧ, ЗВЕРЕВ МИХАИЛ МИХАЙЛОВИЧ, ГАВРИЛОВА ГАЛИНА СЕМЕНОВНА, ЧИГАНОВ ВЯЧЕСЛАВ АНАТОЛЬЕВИЧ, БЕЛОВ ЕВГЕНИЙ КУЗЬМИЧ
МПК / Метки
МПК: G05B 11/01
Метки: промышленным, роботом, цикловая
Опубликовано: 25.02.1979
Код ссылки
<a href="https://patents.su/2-648943-ciklovaya-sistema-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Цикловая система управления промышленным роботом</a>
Устройство формирования сигнала торможения электропривода

Номер патента: 1224939
Опубликовано: 15.04.1986
Авторы: Гольденталь, Кириенко, Латышко, Литвинов
МПК: H02P 5/00
Метки: сигнала, торможения, формирования, электропривода
...1 и сумматора 3.Соотношение напряжений на входах 40 сумматора 3 определяется в завис;:мости от параметров Б Б Ч а а Т (где Т - время установления заданного максимального ускорения а при торможении электропривода). любое произвольное значение в диапазоне от +а до -а, в то время как продолжительность переходного процесса всегда постоянна, Для определения зависимусти между входными напряжениями сумматора 3(фиг,11,ап- проксимируют переходный процесс ускорения (фйг,З) двумя участками (кривая 20): 0(С(Т и еТ. Выбор числа участков осуществляется из условия минимальной погрешности аппроксимации.Для первого участка Зависимость, определяющая формирование сигнала начала торможения:Используя полученное неравенство с учетом коэффициентов передачи...
Преобразователь импульсов датчика перемещения
Номер патента: 1226505
Опубликовано: 23.04.1986
МПК: H03M 1/22
Метки: датчика, импульсов, перемещения
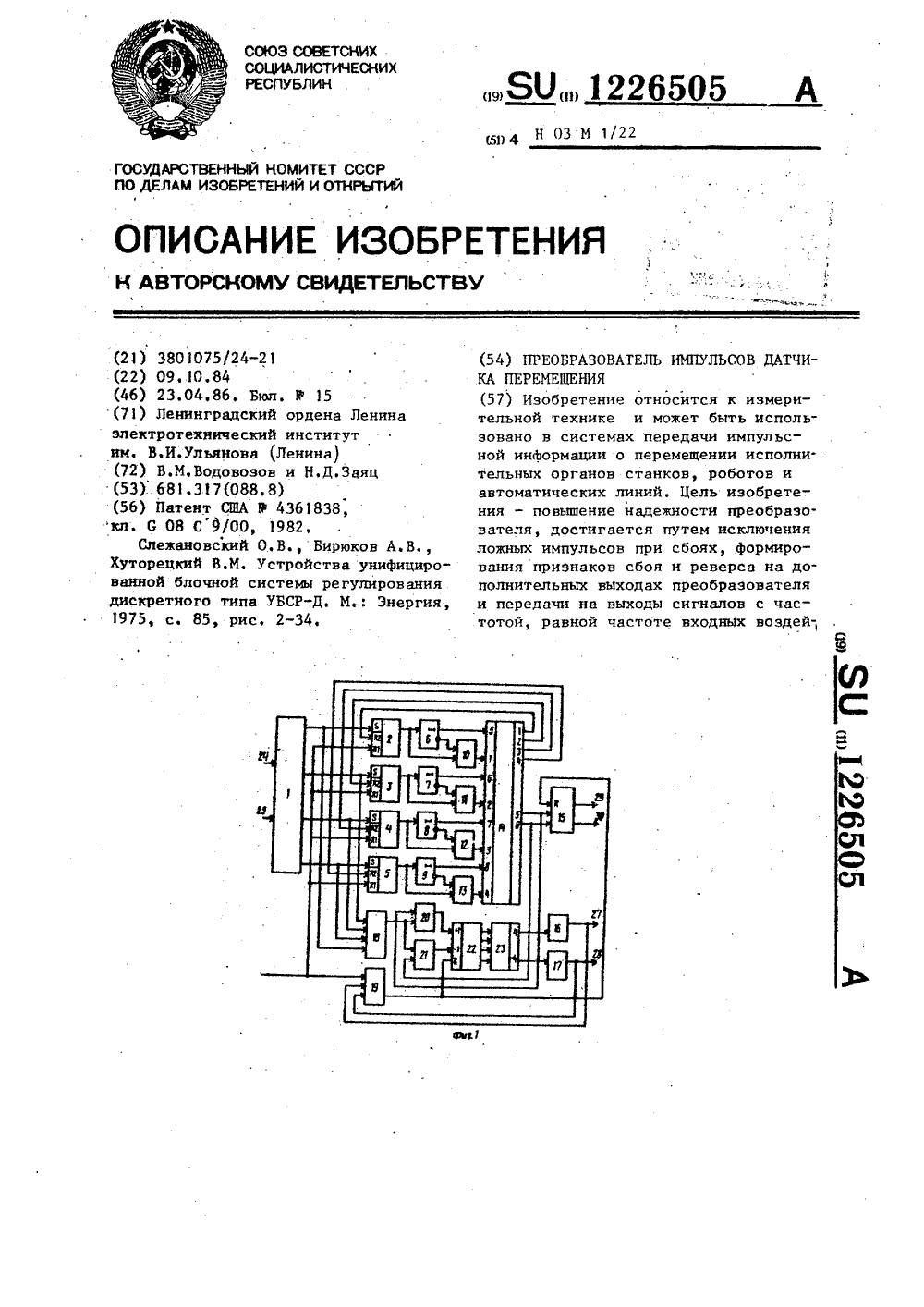
..."1", Совпадение единиц на втором и седьмом входах дешифратора 14 разрешает запись второго импульса в счетчик 22 и пере- . ходит в "0" триггер 4 сигналом с третьего выхода дешифратора 14. После этого элемент 7 задержки разрешает С паузой последовательноститриггер 2 устанавливает "1" на первом входе дешифратора 14. Совпадением единиц на первом и шестом входах дешифратор 14 разрешает записьтретьего импульса в счетчик 22,. ипереводит в "0" триггер 3 сигналомс второго выхода дешифратора 14. Затем через элемент 6 задержки на пятом входе дешифратора 14 устанавливается "1", а на первом входе - "О".Поступление очередного импульсапоследовательности Г ведет к увеличению содержимого счетчика 22 до ве"личины "4". Появление кода "4" напервом...
Пневматический преобразователь периода следования импульсов в аналоговый сигнал давления газа

Номер патента: 1702354
Опубликовано: 30.12.1991
Авторы: Залькинд, Макаров, Мамаева, Сидоров, Хощь
МПК: G06C 5/00
Метки: аналоговый, газа, давления, импульсов, периода, пневматический, сигнал, следования
...содержит входной канал,1, источник 2 пневматического питания,связанный с входом инерционного звена 3,первый клапан 4, соединяющий выход инерционного звена 3 с атмосферой, второй клапан 5, выход которого связан с выходнымканалом 6, третий клапан 7, генератор 8пилообразных колебаний, повторитель 9давления, обратный клапан 10, вход и выходкоторого соединены с выходом повторителя 9и с входами второго 5 и третьего 7 клапановсоответственно. Вход повторителя 9 связанс выходом инерционного звена 3, управляющие камеры 11 и 12 второго 5 и третьего 7клапанов сообщены с выходом генератора8, управляющая камера 13 первого клапана4 связана с входным каналом 1, а выходтретьего клапана 7 через дроссель 14 соединен с атмосферой,...
Формирователь импульсов датчика положения
Номер патента: 1836661
Опубликовано: 23.08.1993
Авторы: Альтшуллер, Кальсин, Каширский, Саевич
МПК: G05B 19/405
Метки: датчика, импульсов, положения, формирователь
...- выход генератора тактовых импульсов; б 1, б 2 - выходы дифференциальных приемников; в 1.в 4 прямые выходы О-триггеров; г 1 г 4 - выходы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ; д 1,д 4 - выходы элементов ИЛИ - НЕ; в 5, вв - инверсные выходы О-триггеров,Формирователь работает следующим образом.В исходном состоянии при неподвижном датчике положения независимо от состояния его выходов на Вых, 1, 2, 3, 4 формирователя сигналы единичного уровня.При работе электропривода датчик положения, связанный кинематически с валом электродвигателя или осью обьекта регули-. рования приходит во вращение и на его выходах появляется чередование сигналов единичного и нулевого уровня с частотой пропорциональной скорости вращения вала электродвигателя, которые поступают...
Устройство для преобразования последовательности импульсов в непрерывный сигнал

Номер патента: 613491
Опубликовано: 30.06.1978
Автор: Лысенко
МПК: H03K 5/00
Метки: импульсов, непрерывный, последовательности, преобразования, сигнал
...к входу зарядного элемента И - НЕ 9. Выход зарядного элемента И - НЕ 9 через диод 10 подключен к входу элемента 11, причем этот вход через параллельно включенные конденсатор 12 и резистор 13 подключен к общей шине.Устройство работает следующим образом, В нормальном режиме при отсутствии входных импульсов на обоих входах элемента 1 имеются единичные сигналы, на его выходе - нулевой сигнал, и конденсатор 5 практически разряжен. На выходе элемента 4 имеется единичный сигнал, и конденсатор 8 заряжен практически до напряжения питания,На выходе элемента 9 имеется нулевой сш пал, а на входе элемента 11 также имеется нулевой сигнал за счет малого падения напряжения на резисторе 13 от вытекающего тока элемента 11. Конденсатор 12 заряжен...
Предыдущий патент: Устройство для управления следящим приводом
Следующий патент: Система управления процессом термообработки полимера при нитеобразовании
Случайный патент: Автоматическое устройство для контроля замыкания контактов