B23Q 15/00 — Автоматическое управление подачей, скоростью резания или положением инструмента и(или) обрабатываемого изделия
Система путевого контроля линейного перемещения рабочего органа

Номер патента: 732122
Опубликовано: 05.05.1980
Автор: Немировский
МПК: B23Q 15/00
Метки: линейного, органа, перемещения, путевого, рабочего
...с кольцом 10,Датчик 17 электрически связан сарифметическим блоком 21, к которому з 5 через блок 22 управления подключенприводной электродвигатель 3. Измерительная головка 4 индукционного датчика электрически связана через блок 23согласования с обмоткой электромагнита 40 24, шарнирно соединенного с поводком19, который шарнирно связан с дополнительной пружиной 25, другой конец которой закреплен на корпусе системы.Перемещение рабочего органа 1 осуществляется винтом 2, приводимым вовращение электродвигателем 3. Одновременно через зубчатые колеса 8 вращение передается винтовому сердечнику5, Это обеспечивает примерно одинаковый воздушный зазор между витками резьбысердечника 5 и головки 4, в результатечего напряжение на выходе головки...
Устройство для автоматического управления положением резца при поднастройке системы спид

Номер патента: 733966
Опубликовано: 15.05.1980
Авторы: Афзалов, Муминов, Назарматов, Рахимов
МПК: B23Q 15/00
Метки: поднастройке, положением, резца, системы, спид
...катушка 11, которая подключена электрически встречно с аналогичной. катушкой 12, Последняя жестко опирается на крышку 10 и соосно скользяще установлена с осью 2. Все это предусмотрено для горизонтальных осевых перемещений. 20Для исключения возможных вертикальных перемещений, которые могли бы появиться иэ-за консольности устройства (пазы в резцедержавке) предусмотрен шарик 13, расположенный 25 между пазом призмы 14 и подставкой 15, К оси 2 симметрично болтами 16 (фиг,3) прикреплены плечи 17 рычагов, на которых укреплены двигатели 18 с эксцентриками 19 (фиг.2), укрепленными на их осях и расположенными взаимно смещенными на 180 С в противоположных плечах. Спецрезцедержавку устанавливают на станке и затягивают гайками 20 (фиг....
Система для автоматического управления металлорежущим станком

Номер патента: 738832
Опубликовано: 05.06.1980
Авторы: Невельсон, Овчинников, Эйдельман
МПК: B23Q 15/00
Метки: металлорежущим, станком
...д 1подаетсяна вход устройства 9 для согласования сигналов, которое предназначено для преобразования этой величиныв форму, пригодную для восприятияустройством 2 для регулирования частоты вращения шпинделя,Система работает следующим образом.Перед началом очередного К-огоцикла обработки деталь, обработанная в предыдущем (К) -ом цикле,измеряется в устройстве 4 и отклонение размера (у л ) от заданного значения (ч )д) =з - преоб-,разуется усилителем 5 в величинуподналадочного воздействия для К-огоцикла. обработки 1)к = Ьдук л, где Ькоэффициент подналадки, Величина 1)"суммируется в блоке б с ранее накойленными подналадочными воздействиямии суммарная величинами= Е О реализуется исполнительным устройством3 в виде соответствующего...
Устройство для растачивания глубоких отверстий

Номер патента: 742107
Опубликовано: 25.06.1980
Авторы: Диперштейн, Качоровский
МПК: B23Q 15/00
Метки: глубоких, отверстий, растачивания
...выходом непосредственно с базами транзисторов 26 и 27 Ззвыходного баланса усилителя мащности. Сигнальная обмотка 39 трансформатора 36 соединена с клеммами 40подачи сигнала управления. Клеммы 41соединяют с источником напряжения Щпитания Фазочувствительного преобразователя, а 42 - с источником питания усилителя мощности.Устройство работает следующим образом. 45В процессе расточки расположенная на штанге 1 втулка 2 получаетвращение за счет сил трения, возникающих между направляющими брусьями4 и изделием 5.50В моменты. нормальной концентрической расточки изделия внешняя система автоматического контроля эксцентриситета не выдает на устройствосигналов коррекции, транзисторы 26и 27 работают в симметричном режимеи поддерживают одинаковые...
Адаптивная система управления зубофрезерным станком

Номер патента: 742108
Опубликовано: 25.06.1980
Авторы: Богачев, Горманюк, Ладик, Семенов, Сидоренков, Цейтлин
МПК: B23Q 15/00
Метки: адаптивная, зубофрезерным, станком
...величины всегда меньше, чем задан 30 ное задатчиком 5, поэтому на выходе регулятора сигнал соответствует ограничению, установ. ленному задатчиком 7. По мере обработки на участке входа увеличивается глубина резания и при этом увеличивается действительное зна 35 чение регулируемой величины, например мощности, В этом случае происходит уменьшение сигнала рассогласования между датчиком 4 и задатчиком 5. При этом уменьшается выходное напряжение регулятора и, следовательно, вели 40 чина подачи. При вариациях условий обработки: глубины резания, твердости материала, условий охлаждения и пр. регулятор изменяет величину подачи, однако максимальное значение подачи не превышает установленного на задатчике 7,45 При приближении к участку полного...
Способ автоматического управления циклом работы зубофрезерного станка

Номер патента: 749633
Опубликовано: 23.07.1980
Авторы: Лившиц, Шлейфман, Шляхецкий
МПК: B23Q 15/00
Метки: зубофрезерного, работы, станка, циклом
...равной нулю. Прерывистость контакта объясняется наличием стружечных канавок на фрезе, затыловкой задней поверхности зубьев, геометрической сущностью метода обкатки и процесса врезания. Если через зону резания пропустить постоянный ток напряжением 11, то в моменты касания фрезой заготовки и в процессе врезания через зону резания проходят импульсы тока. При выходе фрезы из заготовки наблюдается обратный процесс, т. е. непрерывный контакт переходит в импульсный, причем по мере выхода ширина скважин между импульсами возрастает до бесконечности.Способ осуществляется следующим образом.Напряжение от источника 3 тока (фиг. 2)посредством токосъемника 4 подается нашпиндель 5 фрезы. При касании фрезой заготовки 6 через заготовку, токосъемник ,...
Способ определения износа инструмента
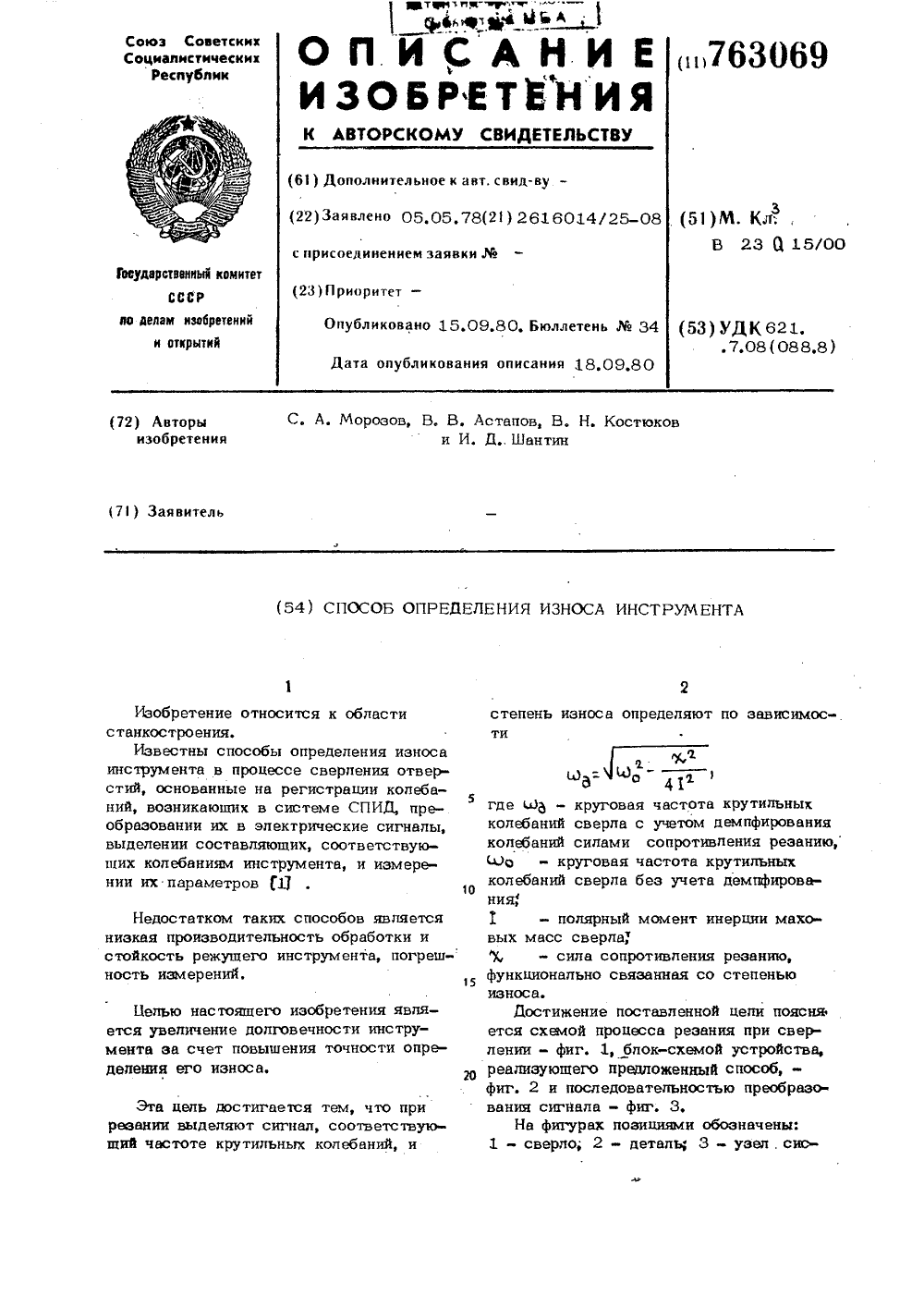
Номер патента: 763069
Опубликовано: 15.09.1980
Авторы: Астапов, Костюков, Мрозов, Шантин
МПК: B23Q 15/00
Метки: износа, инструмента
....колебаний сверла беэ учетадемпфирования;- полярный момент инерции маховых масс сверла,"- сила сопротивления резанию,функционально связанная состепенью износа,Источники информации,тые во внимание при экспертизе.Авторское свидетельство СССР4939, кл, В 23 Я 15/00, 1975. 6 - сила сопротивления резанию, Ыфункционально связанная состепенью износа,Таким образом, по зависимости (3)изменение частоты крутильных колебанийсверла Ыд в процессе обработки харак- Хтериэует степень затупленияинструмента.Блок-схема устройства, реализующего55данный способ, имеет датчик - пьезоэлектрический акселерометр 4, установленный приняна одном из неврапаюцихся элементов 1,системы СПИД-З, Выход датчика соеди- Мо 48 3 7630темы СПИД, на которую установлен датчик...
Система регулирования положения инструмента

Номер патента: 793364
Опубликовано: 30.12.1980
МПК: B23Q 15/00
Метки: инструмента, положения
...предела и сигнала момента настройки в цепи 64. По цепи 73 сигнал подается на схему И 74, на которую также по цепи 67 поступает сигнал отсутствия возврата в исходное положение, в результате чего выходной сигнал выдается в цепь 75 при наличии обоих сигналов в цепях 67 и 73. По цепи 75 сигнал поступает на схему И 76, на которую по цепи 70 подается . также сигнал отсутствия ручной настройки и эта схема выдает в цепь 77 выходной сигнал при совпадении сигна лов в цепях 75 и 70Как очевидно, сигналы в цепях 71 и 77 указывают на то, что: 1)были замерены три последовательных отверстия, каждое из которых соответствен но больше эталона верхнего предела или меньше эталона нижнего предела;2) инструмент находится в положении, соответствующем...
Устройство для автоматической размерной настройки токарных гидрокопировальных полуавтоматов

Номер патента: 791497
Опубликовано: 30.12.1980
Автор: Вороненко
МПК: B23Q 15/00
Метки: автоматической, гидрокопировальных, настройки, полуавтоматов, размерной, токарных
...следующим образом.Суппорт станка переводится в крайнее правое положение, и щуп следящего гидрозолотника опускается на нулевую отсчет ную координату, имеющуюся у какдого копира, напротив шарнирной опоры О, При этом возможны два случая работы системы.Первый случай. Резец 3 не дошел до ЗО скобы 9. Напряжениебудет только на одной обмотке поляризованного реле РП, вследствие чего замкнется контакт и напряжение управления 6 будет подано на тиристор Т. После включения ти-ристора ток пройдет по обмотке возбуждения и приведет во вращение исполнительный двигатель 7, Исполнительный двигатель, воздействуя через механизм 4 малых перемещений на щуп следящего гид р розолотника станка, будет изменять размер статистической настройки до тех пор, пока...
Устройство управляющего контроля отклонений формы в поперечном сечении

Номер патента: 791498
Опубликовано: 30.12.1980
Авторы: Николаев, Парфенов, Смирнов, Тактаров, Шачнев
МПК: B23Q 15/00
Метки: отклонений, поперечном, сечении, управляющего, формы
...формы обрабатываемой детали, в котором сигнал Рпреобразуется в знакопеременный электрический сигнал, характеризующий ошибки при формообразовании, Последний определяется как разность между фактическим процессом изменения размера текущего радиусаи процессом изменения размера радиуса ф (И) ., инвариантным по отношению к формообразующим возмущениям, проявляющимся в пределах времени Т одного оборота,. Этот же каскад отфильтровывает высокочастотные составляющие от помех фильтрами низкой и высокой частоты.С выхода фильтров 3 сигнал ошибки 3 ф . поступает на электрическую линию 4 задержки, введенную вследствие того, что позиция измерения (точка сьема измери- тельной информации А) и позиции регулирования (точка абразивного воздействия Б)...
Способ управления режимами зубофрезерования

Номер патента: 791499
Опубликовано: 30.12.1980
Авторы: Лукашев, Фраймович, Шляхецкий
МПК: B23Q 15/00
Метки: зубофрезерования, режимами
...параметра резания всоответствии с принятым критерием оптотимальности скорость резания и скоростьподачи регулируются одновременно,Недостатком такого способа являетсято, что изменения скорости резания, неМпропорциональные и не совпадающие погвремени с изменениями скорости подачи,вызывают дополнительные колебания нагрузок с запаздыванием на один оборотзаготовки,Предотвращение этих вредных последствий, вытекающих иэ природы процессазубофрезерования, требует не только наличия двух регулируемых сложных по своей структуре приводов, но и сложнуюсистему их связанного управления.Целью изобретения является расширение области применения способа,Указанная цель достигается тем, чтоскоростью резания управляют в зависимости от принятого критерия...
Способ предохранения сверла от поломок и устройство для его осуществления

Номер патента: 791500
Опубликовано: 30.12.1980
Авторы: Азарх, Гуськов, Дединский, Корноухов, Косов, Мучник, Руб
МПК: B23Q 15/00
Метки: поломок, предохранения, сверла
...размещены тензометры 2, связанные с усилителем 3, которыйсоединен с исполнительным реле 4, подключенным к запоминающему блоку 5 иисполнительному механизму 6.Устройство работает следующим образом,Во время обработки сверлом 1 фактический крутящий момент постоянно снимается тенэометрами 2. Полученный сигнал о величине крутящего момента усиливается в усилителе 3 и поступает наисполнительное реле 4, При первом поступлении сигнала о достижении крутящего момента установленной величины исполнительный механизм 6 прекращаеттолько рабочую подачу сверла, а в эапоСоставитель В, Жигановова Техред МГолиика Корректор Н. Бвбинец ктор Г, П ПодписиСССР 1160ннЬго комитетай и открытий , Раушская наб иал ППП Патент", г,Ужгород, ул, Проектная 4 3 79...
Шлифовально-полировальный станок для обработки параболических линз

Номер патента: 791501
Опубликовано: 30.12.1980
МПК: B23Q 15/00
Метки: линз, параболических, станок, шлифовально-полировальный
...с выходом органа 15 управления через замьпсающийконтакт устройства 1 9 контроля наличиявращения двигателя 6. Выход устройства19 связан с реверсирующим устройством18 через релейный двоичный элемент 20,На станине 1 установлен путевой датчик21, который связан с выступами 14 кривошипа 9 и размыкающий контакт которого шунтирует первый размыкающий контактреле 17 времени,Станок работает следующим образом.Установив на шпиндель 2 линзу 22,опускают на нее нож Я и включают станокорганом 15 управления, При замыканииконтакта органа 15 управления включается реверсирующее устройство 18, выдавая команду на вращение двигателя6 "Вперед"- шпиндель 2 приводится вовращение от двигателя 6 через ременную,передачу 5 и червячную передачу 3,4.При замыкании...
Устройство для автоматической поднастройки системы спид

Номер патента: 791502
Опубликовано: 30.12.1980
Авторы: Афзалов, Муминов, Рахимов
МПК: B23Q 15/00
Метки: автоматической, поднастройки, системы, спид
...связано с обмоткой возбужления якоря электродвигателя 1 и механически - с хвостовиком державки резца 3, балансир 6 с прорезью на одном конце. Балансир 6 одним своим концом жестко закрепл.н на хвостовике державки резца, а прорезью другого конца налет на эксцентрик приводного электродвигателя,Устройство работает следующим образом:При включении приводного электродвигателя 1 эксцентрик 2 вращается в прорези балансира 6, причем , воздействуя попеременно на верхнюю и нижнюю части прорези балансира 6, заставляет его совершать сложное движение - колебательное и возвратно-поступательное одновременно, Поскольку межосевое расстояние эксцентрика 2 и державки резца 3 остается постоянным, и балансир 6 одним своим концом жестко связан с лержавкой...
Система управления металлорежущим станком

Номер патента: 791503
Опубликовано: 30.12.1980
Авторы: Водяник, Кокоулин, Николаев, Шачнев
МПК: B23Q 15/00
Метки: металлорежущим, станком
...поступившего сблока управления быстрым отводом, управлемая опора совершает обратное микроперемещение на ту же величину (происходит мгновенный отскок обрабатываемойде: али от абразивного круга, процесс резания закопчен) за промежуток времени,значительно меньший, чем время отработ- -55ки команды прекрашения процесса обработки испоцсительным механизмом технологической системы, обеспечивающей возвратв исходное первоначальное положение инПрименение данного устройства при врезном бесцептровом шлпфозапии на оцо-. рах позволяет существенно сократить погрешности размерной Обработки деталей, обусловленные динамикой масс привода исполнительного механизма технологической системы, нестабильностью скорости сьема припуска ца конечном этапе процесса...
Устройство для фрезерования деталей с криволинейным сечением

Номер патента: 791504
Опубликовано: 30.12.1980
Автор: Артемов
МПК: B23Q 15/00
Метки: криволинейным, сечением, фрезерования
...8 с возможностью их перемещения относительно инструмента 22на величину А, определяемую в зависимости от размера Ь полки лонжерона 16иди ширины законцовки. Установка щупадатчика относительно крайней кромки лез-.ЭОвия инструмента определена размером А 4Датчики 15 состоят из собственно датчиков 23 (индукционного), корпусов 24,закрепленных на плите 21, пружин 25, .рычагов с осью 26 и электромагнитов27, закрепленных на инструментальнойголовке 8 с возможностью их перемещения согласовано с перемещением корпусов 24. Датчики 23, электромагниты 27связаны электрически с управляющим бло 4 фком 28 смонтированным в шкафу 20. Отуправляющего блока идет электрическаясвязь к приводу 14, который через винтовую пару 29 связан со стойкой 30 силовой головки...
Способ управления точностьюобработки ha металлорежущихстанках

Номер патента: 806366
Опубликовано: 23.02.1981
Авторы: Антонюк, Выслоух, Заковоротный, Остафьев, Палагнюк, Ткаченко
МПК: B23Q 15/00
Метки: металлорежущихстанках, точностьюобработки
...оттуда на полосовой Фильтр 3, настроенный на туже гармонику, прохождение которой от задней грани резца до места установки преобразователя наилучшее.Выделенная, гармоника нормируется по своему интегральному уровню с помощью усилителя 4 с регулируемым коэфФициентом усиления и интегратора 5 и поступает в детектор 6, где выделяется ее огибающая и подается на перестраиваемый полосовой Фильтр 7, который перестраивается от генератора 8, в качестве которого можно использовать генератор пилообразного напряжения.Выделение частоты наибольшего уровня и слежения за ее девиацией осуществляется следующим образом: с блока 9 управления поступает сигнал на открытие аналогового ключа 10, на включение аналогового запоминающего устройства 11 и на запуск...
Способ компенсации погрешностейобработки

Номер патента: 812528
Опубликовано: 15.03.1981
Авторы: Кобылинский, Луцевич, Махонкин
МПК: B23Q 15/00
Метки: компенсации, погрешностейобработки
...д иуз функций о и В , и траекторияРк дополнительного корректирующегодвижения инструмента. Изменение погрешностей на величину допуска происходит на участке периметра профиля,длина которого во много раз большевеличины допуска. следовательно, коррекцию можно задавать в виде конечного числа дискретных параметров, отнесенных к определенным участкампрофиля,В опорных точках профиля Й ( =1, 202 е) с координатами ) производяткоррекцию на величины ьзначенийфункции поправок Г в опорйых точках.В интервале между двумя опорными точками, например М и И , дополнитель- дное корректирующее двйжение инструмента производят по траектории Рв виде трех сопряженных отрезков дугокружностей (, , с. При этомрадиус ци центр О" дуги сд и радиус Вии центр...
Головка программно-управляемогокоординатографа
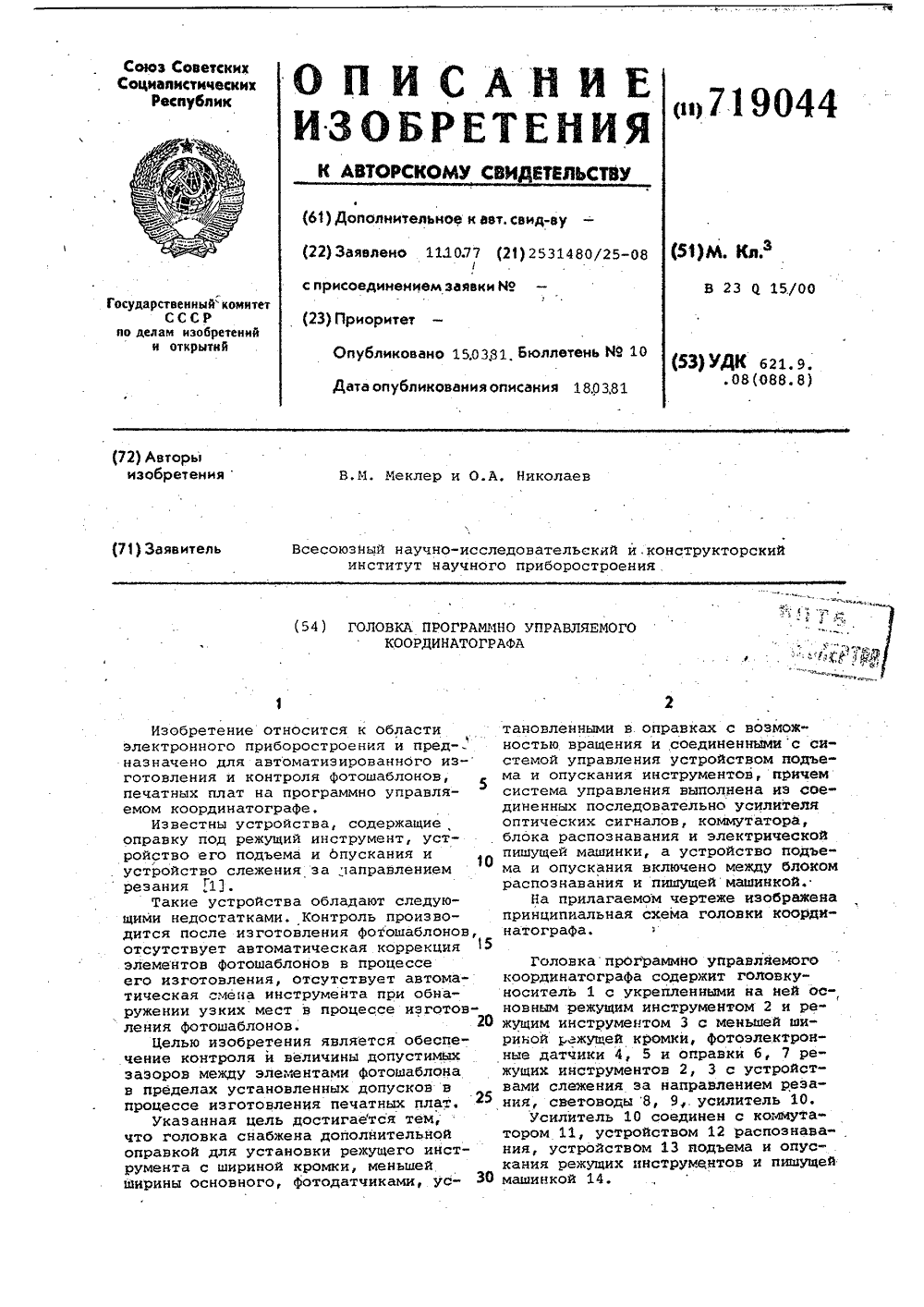
Номер патента: 719044
Опубликовано: 15.03.1981
МПК: B23Q 15/00
Метки: головка, программно-управляемогокоординатографа
...оптически контрастным.Одновременно. оправки 6, 7 с устройствами слежения за направлением .движения режущих инструментов 2, 3разворачивают два идентичных фото Оэлектронных датчика 4,5 по ходу дви"жения режущего инструмента 2. Изображения соответствующих участков фотошаблона 15, находящихся перед режущим инструментом 2 или 3 по ходу егодвижения, формируются Фотоэлектронными датчиками 4 и 5 ипо световодам8 или 9, противоположные концы кото- "рых уложены соответствейно форме развертки приемника излучения - Фоторезистивной матрицы, поступают в усилитель 10Фотоэлектронные датчики 4, 5 исветоводы 8, 9 выполняют Функциюдискретной сканирующей апертуры, квыходу каждого элемента которой через усилитель 10 и коммутатор 11, по- зволяющий задавать...
Способ автоматического управленияподачей при фрезеровании

Номер патента: 814658
Опубликовано: 23.03.1981
Авторы: Левин, Лисак, Ратомский, Фраймович
МПК: B23Q 15/00
Метки: управленияподачей, фрезеровании
...фрезы при стабилизированном крутящем моменте И, изменяющемся от Ищ, до И ,; на фиг. 5 - изменение значений подачи от 5 и;п до 5 П 1 в при стабилизированном крутящем моменте.Способ автоматического управления подачей при фреэеровании заключается в следующем.Уровень напряжения О , пропорциональный крутящему моменту И на шпинделе 1, от датчика крутящего момента 2 подается в блок 3 сравнения и сравнивается с уровнем напряжения Оо, который соответствует моменту, заданному установкой.На выходе блока сравн вт вают такие амплитуды,ту управляющего уровняпри которых достигают и814658 акаэ 908/21 Подписное ВНИИП Тираж контролируемого параметра И на уровне его максимума Ищ, соответствующего заданному периоду стойкости.Сформированный, таким...
Способ стабилизации положения осидетали при вращении ha радиальныхопорах

Номер патента: 814659
Опубликовано: 23.03.1981
МПК: B23Q 15/00
Метки: вращении, осидетали, положения, радиальныхопорах, стабилизации
...опорных радиусов й, и й, электронные устройства 4, усиливающие сигналы датчиков, меха-низмы 5 малых перемещений, жестко связанные с опорными элементами.В процессе вращения детали 1 с постоянной угловой скоростью Уд датчики 3 вырабатывают сигналы, пропор" циональные величинам изменения текущих значений опорных радиусов. Усиленные и преобразованные в электронных устройствах 4 сигналы датчиков поступают на механизмы малых перемещений, которые осуществляют возвратно-поступательные движения опорных элементов, равные по величине и направлению величинам изменения текущих значений опорных радиусов. В результате обеспечивается стабильное положение оси вращения детали пО углу поворота.При использовании предлагаемого способа исключается влияние на...
Способ автоматического управле-ния процессом резания

Номер патента: 814660
Опубликовано: 23.03.1981
Автор: Сквирский
МПК: B23Q 15/00
Метки: процессом, резания, управле-ния
...разорванных связей в относительных единицах за период от начала эксплуатации инструмента до момента временисумма неразрушенных (сохранившихся) межатомных связей к моменту времени с,момент времени 1 значености Ъ определяется вы 5 для соответствующих значений Р, Ф иТ в момент времени,й 3Величина О определяется иэ выра 5жения (1) путем суммирования повреждаемостей в период времени от нуля до 5 ЬТаким образом, момент сопротивления разрушению режущего инструментав "опасном" сечении, определяющий егомгновенную прочность в конкретныймомент времени й может быть определен из выражения (1) при наличии информации о сумме разорванных межатомных связей на данный момент времени.С учетом(1) и (2) фактическая средняя за оборот шпинделя...
Измерительное устройство дляактивного контроля

Номер патента: 814661
Опубликовано: 23.03.1981
Авторы: Глухов, Леун, Цымбаленко, Чертовских
МПК: B23Q 15/00
Метки: дляактивного, измерительное
...хода плунжера вокруг оси и в продольном направлении осуществляется штифтом 10, запрессованным в плунжере 3, и перемещающимся в пазе корпуса 1. Мембрана 11 из бенэомаслостойкой резины крепится к корпусу гайкой 12, герметично обжимает плунжер 3 и надежно защищает плунжерную пару от попадания абразивных частиц.Внутренняя полость 13 измерительного устройства заполнена жидкостью (индустриальное или приборное масло) без содержания в ней пузырьков нерастворенного воздуха и соединена с трубопроводом 14 череэ обратный клапан 15 и регулируемый дроссель 16. По трубопроводу 14 к измерительному устройству подается жидкость под давлением Р, произведение которого на площадь плунжера 3 дает величину измерительного усилия. Индуктивный...
Способ перемещения рабочегооргана ctahka

Номер патента: 829402
Опубликовано: 15.05.1981
Автор: Шиманович
МПК: B23Q 15/00
Метки: ctahka, перемещения, рабочегооргана
...поепечего стол отрывается от штока 8 идвижется по направляющим в исходное положение у толкателя 5. Таким образом осуществляется возвратно-поступательное перемещение стола с практически любой длиной хода, например 20 метров, без длинных и сложных передач, с высокой точностью (поскольку на рабочем участке хода на негоне действует привод его возмущения),практически с любой гибко регулируемой за счет импульса разгона скоростью. 20 Если толкатели снабжены аккумуляторами энергии, то при торможениистола его кинетическая энергия переходит в потенциальную энергию аккумулятора и возвращается столу при разгоне в обратную сторону, Это позволяет уменьшить мощность толкателей иэкономить. энергию на перемещение стола. В этом случае достаточно...
Способ управления упругими переме-щениями системы спид

Номер патента: 829403
Опубликовано: 15.05.1981
Автор: Пестунов
МПК: B23Q 1/01, B23Q 15/00
Метки: переме-щениями, системы, спид, упругими
...обрабаты 2ваемой детали. Это снижает точность обработки. На чертеже приведена схема осуществления способа. Для повышения точности обработки элементы системы СПИД подвижную 1 и неподвижную направляющие 2 дополнительно нагружают электромагнитом 3. Дополнительным нагружением направляющих управляют в функции деформации, для чего устанавливают датчики 4 и 5 деформации. Величину дополнительного нагружения контролируют по деформации, которую определяют из соотношения где Ь -деформация направляющих оттехнологической нагрузки;6 -деформация направляющихот дополнительной нагрузки.При обработке в зависимости от величины технологической нагрузки и массы подвижных частей датчики 4 и 5 через. усилитель и исполнительное устройство (на черте829403...
Устройство для определения размерногоизноса и контроля положения режущегоинструмента b токарных ctahkaxc чпу

Номер патента: 829404
Опубликовано: 15.05.1981
Авторы: Каминский, Ковалевский, Лоц, Пухов
МПК: B23Q 15/00
Метки: ctahkaxc, положения, размерногоизноса, режущегоинструмента, токарных, чпу
...декады блока ЧПУ, управляющей перемещением суппорта в положительном направлении, а его отрицательныйвход соединен с выходом логического элемента, к входам которого подключены выход кольцевой декады блока ЧПУ, управляющей перемещением суппорта в отрицательном направлении, и выход триггера,причем выход логического элемента соединен со входом коммутатора шагового двигателя станка,На чертеже приведена схема устройства и показаны его связи с устройствомЧПУ и станком.Устройство содержит датчик 1, триггер2, логические элементы З,и 4, блок 5 управления, программный реверсивный счетчик 6, кольцевые декады 7 и 8 устройстваЧПУ, логический элемент 9 ЧПУ, коммутатор 10 шагового двигателя станка.Устройство работает следующим образом.При...
Система управления шпинделем

Номер патента: 831060
Опубликовано: 15.05.1981
Авторы: Есики, Мицухико, Сигеки
МПК: B23Q 15/00
Метки: шпинделем
...заданного положения также заранее задается для принятия логического значения "0" или "1" в зависимости от того занял ли шпиндель свое заданное вращательное положение, Выходной сигнал от запирающей цепи 22 подается к выключателям 19 и 20, а также к выключателю 21 через цепь 25. Выключатели с 19 по 21 включаются под действием управляюцего входа логического "0" и выключаются под действием управляющего входного сигнала логической "1".Следовательно, когда команда ориентации шпинделя представляет "О", т.е.в обычном состоянии,то выход от запирающей цепи 22 равен "1" независимо от того был ли приложен сигнал заданного положения, а поэтому вклю ченным остается только выключатель21, а выключатели 19 и 20 выключены, Когда команда ориентации...
Устройство для адаптивнойподнастройки системы спид

Номер патента: 831508
Опубликовано: 23.05.1981
Авторы: Курешов, Пикалов, Шатохин, Яскунов
МПК: B23Q 15/00
Метки: адаптивнойподнастройки, системы, спид
...полостью 10 мембранного регулятора 11 расхода, а в соединительном канале 12 установлен регулируемый дроссель 3, Карманы 13 и 14 переднего радиальногогидростатического поцшипника, восприни 35мающие составляющую Р сипы резания,имеют различную . эффективную плошадь.Карман 14, имеющий меньшую эффективную площадь, соединен с источникомдавления непосредственно, а карман 13 - 40через управляющую полость 15 мембранного регулятора 11 расхода, смазка в которую поступает через дросселирующийзазор между торцом сопла 16 и мембраной 17, Управляющая полость 10 мембраиного регулятора расхоца 11 имеет дренажный канал 18, в котором установленрегулируемый дроссель 3 д. Соотношениеэффективных площадей карманов 13 и 14обратно пропорционально соотношению...
Устройство для обработки диэлектрическихпокрытий металлических изделий

Номер патента: 831529
Опубликовано: 23.05.1981
Авторы: Васильев, Келейников, Копысов, Татевосян
МПК: B23Q 15/00
Метки: диэлектрическихпокрытий, металлических
...ко входам которогоподсоединены датчики перемещения,пороговое устройство 3, вход которого подсоединен к выходу блока выборамаксимального сигнала, блок 4 переключения подач, входы которого подсоединены к выходам блока выбора максимального сигнала и порогового устройства, блок 5 управления, подключенный к блоку переключения подач,механизм 6 поперечной подачи инструмента, подключенный к блоку управления, блок 7 аварийного отвода инструмента, вход которого подключен к блоку переключения подач, а выход соединен с механизмом поперечной подачиинструмента, режущий инструмент 8,831529 Формула изобретения Составитель В. Платоноведак тор А. Шишкин а Техред М. Рейвес Коррект тец,Заказ 3746 7 Тираж 770 ВНИИПИ Государст по делам иэобр 3035,...
Устройство для контроля криволинейныхповерхностей

Номер патента: 831530
Опубликовано: 23.05.1981
Авторы: Гомануха, Киселев, Кожевников
МПК: B23Q 15/00, G01B 7/28
Метки: криволинейныхповерхностей
...детали 22. Для визуального координирования устройства наповерхности детали и эталона используются две взаимно перпендикулярныериски 23. В процессе контроля детальи эталон закреплены на магнитной плите 24 станка 25. В случае применениякопира, имеющего большие габариты, 55он закрепляется на торце магнитнойплиты. Устройство работает следующим образом.Контролируемый профиль детали 22 и профиль эталона (копира) 21 обводятся по профилю койирными наконечниками, закрепленными на шпинделе 1. Вращательное движение шпинделю и поступательное, перпендикулярное оси вращения шпинделя, сообщается рукояткой 19. Копирный наконечник 3 закреплен в шпинделе подвижно и через датчик 4 передает изменение размера проФиля детали на регистрирующее устройство 5,...