B21D 7/12 — с программным управлением
411939

Номер патента: 411939
Опубликовано: 25.01.1974
МПК: B21D 7/12
Метки: 411939
...па конце оси 5. Программирующее устройство содержит барабан 6, на поверхности которого закреплены упоры 7, и подвижную каретку 8, несущую конечный выключатель 9 и перемещающуюся с помощью ходового винта 10. Ходовой винт и барабан соединены с помощью пары зубчатых шестерен 11. 1-1 а каретке дополнительно установлены следящие ролики 12, а на корпусе программирующего устройства - кассеты 13 с кулачками 14, Кулачки взаимодействуют с тормозными золотниками 15, управляющими работой силовых цилиндров 16, дросселируя или запирая поток жидкости. Управление направлением движения поршней силовых цилиндров осуществляется с помогцью распределительных золотников 17, управляемых конечным выключателем 9 и упорами 7, Для тонкой регулировки скорости...
Гибочная машина

Номер патента: 415852
Опубликовано: 15.02.1974
Автор: Карл
МПК: B21D 7/02, B21D 7/12
Метки: гибочная
...31 в его заштрихованнойпозиции приводится в действие кнопочныйвыключатель 27, начинается прохождение тока в соединении между схемой включения для25 угла изгиба А и местом запоминания 12, ибопоследняя присоединена через шаговый контролер 18 и переключатель 32, а также ответвление провода 33 к линии электроснабжения2. Реле с самоблокировкой 23 тогда переходитЗО в самоблокировку и вызывает в остальном всхеме включения места запоминания 12 последующий процесс включения, как следствиепоследнего соединения со схемой включениядля угла изгиба А, с одной стороны, и с шагоЗЗ вым контролером 18, с другой стороны, остается в действии и тогда, когда вызывающийимпульс тока отпал. Последнее имеет место, когда шаговый контролер 18 включается дальшена...
Система управления перемещением гибочного инструмента

Номер патента: 487693
Опубликовано: 15.10.1975
Авторы: Жерносеков, Лурье, Фланчик
МПК: B21D 7/12
Метки: гибочного, инструмента, перемещением
...После преобразования информации устройство 2 вырабатывает сигнал, переключающий РС 4 на з 0 вычитание. С выхода РС 4 информация487693 Р = (1 + Р) Ьо,Составитель А. Ломако Редактор Г. Мозжечкова Техред Т. Курилко Корректор Е. Рожкова Заказ 524/1 О Изд ЧЬ 2045 Тираж 9 бб Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб., д. 415Типография, пр. Саптпова, 2 поступает на устройство 5 с приводом 6, обсспсчпвгпощее преобразование цифрового сигнала в аналоговый и изменение структуры системы переключением с режима регулятора скорости в режим отработки заданного значения пути торможения. Регулируемый привод 6 начинает вращаться и перемещает гибочный инструмент 9 вверх,...
Система автоматического управления трубогибочной машиной

Номер патента: 493273
Опубликовано: 30.11.1975
Авторы: Басин, Брук, Будыковский, Личман, Меерович, Рехтер, Слюсаренко, Фихман
МПК: B21D 7/12, G05B 19/02
Метки: машиной, трубогибочной
...лимбы 7 фиксируют посредством винтов на втулках 6.Устройство работает следующим образом.При подаче кнопкой 13 или контактом реле 14 цикла импульса напряжения на катушку шагового искателя 15 ротор последнего переходит с позиции О на позицию 1.Если для требуемого угла гиба используется установка позиции 1, то переключатель 16 позиции замыкает цепь питания конечного выключателя 12,. В процессе гибки по достижении заданного угла гиба срабатывает путевой выключатель 12 через который напряжение поступает на катушку реле 17, Контактом реле 17 подается команда в схему управления приводом трубогиба на прекращение рабочего хода, Другой контакг реле 17 дает команду на переход ротора на следующую позицию,На позиции 11 контакт переключателя 16...
Устройство для управления процессом гибки труб на трубогибочном станке

Номер патента: 497074
Опубликовано: 30.12.1975
Авторы: Ардаматский, Брауде, Колявкин, Михайлов, Плюснин, Симонов, Эйсмонт
МПК: B21D 7/12
Метки: гибки, процессом, станке, труб, трубогибочном
...в каретке, а качающийся рычаг снабжен кулисой,в которой закреплен палец указанной рейки.5 На чертеже изображено предлагаемое устройство.Командный орган 1, соединенный с приводом продольной подачи трубы (не показан),связан с тягой 2, взаимодействующей с рычаО гом 3, установленным на оси 4 качания, Рычаг 3 снабжен кулисой 5, в которую входитпалец 6, закрепленный на рейке 7, связаннойс сектором 8.Сектор 8 закреплен на ползушке 9, имею 15 щей ось 10 качания, Оси 4 и 10 качания размещены на каретке 11, которая приводится вдвижение прои вращении винта 12 рукояткой13, Величина перемещения каретки 11 отсчитывается по шкальному механизму 14,20 На каретке 11 выполнены направляющие15, в которых установлена рейка 7.Ползушка 9 установлена в...
Станок для гибки труб

Номер патента: 499008
Опубликовано: 15.01.1976
Автор: Иванов
МПК: B21D 7/12
...10 механизма осадки, которая содержит корпус 56, установленный в направляющих 5 и 58, В корпусе 56 смонтированы неподвижная 59 и подвижная 60 губки, Подвижная грубка снабжена винтом 61 и установлена в направляющей 62, прикрепленной к корпусу 56, на котором также установлен механизм 63 натяжения тяги 51,Опорный стакан 20 снабжен кожухом 64, полость которого соединена со сливным каналом 65, Уплотнительноекольцо бб и прокладки 67, 68 с крышками 69, 70 предохраняютмеханизм регулирования осадки и подшипники 35 и 36 от попадания воды, поступающейдля охлаждения индуктора 7 и трубы 42.Водило 5 снабжено настроечными винтами71 и 72, которые связаны с зажимными призмами (на чертежах не показаны),Станок работает следующим образом.Винтами 17 и 61...
Устройство для управления процессомгибки труб на трубогибочном станке

Номер патента: 508301
Опубликовано: 30.03.1976
Авторы: Ваганова, Колявкин, Михайлов, Плюснин, Симонов, Эйсмонт
МПК: B21D 7/12
Метки: процессомгибки, станке, труб, трубогибочном
...б 1 О )рд ня сгд О Пс мс с другим СЛОЖИ)51 куяка. ЦЕГП.( тех ног ог счет про н)ружны женин кхиство позв ько одного в которых Пр (С жным дн алядкя по.уср( б тол к к, Я С Г(5 1 )11)нсрсн оляет нар) ж )олож ходе и метро ожени производить НОГО ДИЯМЕТ- ение оси тру Иоку труо требуетсяНГОСКОГО и р вв) нзооретсния является рясширени веских возможностеи "стройства з зводсгвд гиоки труб с различныв и диаметром при неизменном поло лдчкя,2) АвОрь и: обрех ния Л, Н, Ваганова 53) УДК 621.774.63.061 1088.8)ззамодествует конгрп,1 Иллсц 4. с)ОГироваппый па рычаге 5,Пажимпой ролик 1) смоиИро 3 ян ил рылге 7, Выполнепиом и виде кори)сл метан 3,ЕППОГО 13 ПОДПИПИ ИКЛ. ПЛ ПРП 30 ДИО)1 13 1 УВ КОРПУСЕ РЬ 1 Чс 1 ГЛ 7 РЯЗМС 1 ЦСП ЧСР 351 Кспспгеииь 1 с...
Устройство для определения углов поворота гибочного шаблона

Номер патента: 517355
Опубликовано: 15.06.1976
Автор: Суховеев
МПК: B21D 7/12
Метки: гибочного, поворота, углов, шаблона
...шарнира 23 на корпусе 5 и подпружиненным пружиной 24. На держателе 21 расположена шкала 25 постоянной коррекции и подвижный визир 26. Диски 8 стягиваются на барабане 7 с помощью гайки 27. Держатель 21 подпружинен пружиной 28. На направляющей 17 установлена шкала 29 пропорциональной коррекции угла поворота гибочного шаблона.Предлагаемое устройство работает следующим образом.Перед началом гибки партии труб осуществляют пробную гибку одной трубы при повороте гибочного шаблона, например, на 20 и 120. Затем измеряют углы на трубе и, пользуясь специальной номограммой, определяют величины углов постоянной и пропорциональной коррекции. Опустив гайку 27 барабана 7, осуществляют установку дисков 8 по их шкалам на нужный номинальный угол гиба с...
Устройство для контроля углов гибки и пружинения к трубогибочному станку

Номер патента: 517356
Опубликовано: 15.06.1976
Авторы: Казанцев, Клепиков, Лидер
МПК: B21D 7/12
Метки: гибки, пружинения, станку, трубогибочному, углов
...цепь электродвигателя 9 включен вольтметр 13, шкала которого проградуирована в угловых единицах. На валу сельсинадатчика установлен упор 14, взаимодействующий с микровыключателем 15.Поворот вала гибочного шаблона осуществляется от привода 16, а прижатие сгибаемой трубы к гибочному шаблону производится с помощью прижима 17.Работа устройства осуществляется следующим образом. Перед гибкой трубы сельсином-датчиком 1 устанавливается заданный угол изгиба. На гибочный шаблон 6 укладывается труба 7 и с помощью прижима 17 поджимается к гибочному шаблону. Включается привод 16. Датчик 4 в данном положении сбалансирован на нуль. Гибочный шаблон, поворачиваясь через вал 3, вращает ротор сельсина-приемника 2. При достижении заданного угла гибки...
Устройство для программного управления

Номер патента: 460668
Опубликовано: 05.08.1976
Авторы: Поляк, Силантьев, Шубин
МПК: B21D 7/12
Метки: программного
...меха:игзма 7. Каждый узел креплеш 1 Я кулачков к ленте сос. тоит из оси 8, щеки 9, жестко закрепленной на одном ко 1 ше осц, шеки 10, свсоодцо надетой и поджатой гайкой 11. Между шекзхи 9 и 10 надеты къ.1 ачки э, ра,положеы 1 е по ря ам В соотет.Твин со шеками 2 комацдоаппарата, положение куса 1 ков относиельцо шуиов сиксируется проставочць 1 хи ко;ьцами 1:. Скошен. ые выступы шек 9 и 10 служат как шя закрепления осц с кулачками за торцы ленты, так и для прижима кулачков к поверхости тюнты.Кроме того, выступы шск фиксируют ленту с кулачками по торцам диска 3.Конфигурация сопУтой трубы зависит от взаимного расположения кулачков ца ленте и расстояний между цимц. Для точной установки кулачков между собой может быть использован обыкцосцный...
Станок для гибки труб

Номер патента: 543447
Опубликовано: 25.01.1977
МПК: B21D 7/12
...и его торможение муфтой 5,Замедление скорости подачи и гиба в конце программы необходимо для уменьшения инерционных масс, действующих на работу муфт 5 и 6, и увеличенич стабильности формы трубы при гибе.Поворот трубы на угол между плоскостями гиба происходит через механизм поворота 25, При этом вращение через систему шестерен и приводную шестерню 11 передается на поворотную втулку 10, которая через шпонку 26 поворачивает шпиндель 8 с трубой 19. Во время работы механизма поворота 25 происходит слежение за углом поворота механизмом считывание угла поворота 27. Заготовка трубы 19 одним концом зажимается в шпинделе 8, а другим концом прижимается цилиндром 20 к гибочному ролику2. Далее включается электродвигатель 7,вращение которого не...
Способ изготовления изделий

Номер патента: 546412
Опубликовано: 15.02.1977
Автор: Давыдов
МПК: B21D 7/12
...равна заданной. В этот момент в контакт с подающими валками 1 выходит сечение Г заготовки (фиг. 2), левый гибочный валок 2 останавливается, а подающие валки 1 вращаются до момента прохождения заготовкой (участки ГБ), т. е. когда в контакт с этими валками входит сечение Б.Далее происходит изменение направления вращения подающих валков 1, заготовка начинает двигаться в обратном направлении. При перемещении заготовки на участке БГ левый гибочный валок 2 своего положения не изменяет. Одновременно с перемещением заготовки на участке БГ происходит подъем правого гибочного валка 3, причем к моменту контакта с подающими валками 1 сечения Г заготовки он занимает положение, аналогичное левому гибочному валку 2 (фиг, 3, штриховые линии).При...
Устройство для отсчета углов поворота гибочного шаблона трубогибочной машины

Номер патента: 617111
Опубликовано: 30.07.1978
Автор: Суховеев
МПК: B21D 7/12
Метки: гибочного, отсчета, поворота, трубогибочной, углов, шаблона
...в виде набора колец 29 с экранами 30, взаимодействующими с блоком конечных бесконтактных выключателей 31. Определение величины смещения нуля отсчета осуществляется по шкале 32 постоянной коррекции, жестко закрепленной на копире 3 с помощью индикатора 33, смонтированного на звездочке 22. Контур копира 3 является задатчиком закона гибки и построен по максимальному значению величины пружинения, Взаимодействуя с роликом двуплечего рычага, он отклоняет его на некоторую постоянную величину, зависимую от угла поворота гибочного инструмента. Величина угла поворота водила 21 звездочки 22 зависит от положения корректора 10 величины пружинения на плече 9 двуплечего рычага 5.Устройство работает следующим образом, На основании...
Профилегибочный горизонтальный пресс с программным управлением

Номер патента: 673344
Опубликовано: 15.07.1979
Авторы: Еремеев, Мельников, Сиротин
МПК: B21D 7/12
Метки: горизонтальный, пресс, программным, профилегибочный, управлением
...8 с органом контроля 9, представляющим собой фиксированный контактный упор. Каретка с помощью привода 10 имеет возможность перемещаться вдоль направляющих консоли с остановкой в заданных точках, контролируемых датчиком. На подвижной 1 о опоре 1 со стороны ввода заготовки установлен механизм подачи 11 с гидрозахватом полосы 12.Механизм подачи установлен на осевом шарнире по центру опоры и имеет возмож 15 ность поворачиваться под воздействием профиля 13 вдоль его оси. Величина шага подачи полосы предварительно может быть установлена на расчетную величину подачи для каждого типоразмера профиля. Система программного управления прессом 14 совмеще- ъо на с пультом управления. Пресс работает следующим образом.Информация о форме полосы,...
Машина для гибки труб

Номер патента: 694248
Опубликовано: 30.10.1979
Авторы: Гончарова, Мошнин, Нистратов, Фролкина, Янов
МПК: B21D 7/12
...17, проем в ю каретке 2, направля 1 ощне ролики 12, индукор 11 н зажим 9 на заданную величину.11 ослс этого устанавливается толкатсль 4 и закрывается зажим 9. Включается нагрев и охлаждение трубы, 11 о истечении за- гп данного времени прогрева автоматически посредством привода и винтов 3 начинается движение толкателя 4 вперед, который, упираясь в торец трубы, перемещает ее через включенный индуктор 11. В момент со ю прикосновения трубы с упором 10 запирается зажим 9, стопорятся винты 3 и подается давление в левую полость гидроцилиндров 6. Каретка 2 под действием штоков 5 начинает движение вперед и посредством 20 толкателя 4 перемещает трубу через индуктор 11 с прежней скоростью.Одновременно с этим поворачивается кронштейн 8 и вал 7...
Устройство для гибки листового металла

Номер патента: 747405
Опубликовано: 23.07.1980
Автор: Ренцо
МПК: B21D 7/12
Метки: гибки, листового, металла
...27, которая может смещаться в направляющей 28 соосно с гнездом 14 корпуса 7. В верхней части зубчатая рейка 27 контактирует с нижним концом хвостовика 23 щупа 15, тогда как нижняя часть зубчатой рейки 27 смещается пружиной 29, которая регулируется с помощью винта 30.Пружина 29 смещает рейку 27 вверх и одновременно с ней щуп 15, который таким образом удерживается в нерабочем положении, определяемым расположением шайбы 24 в полости 25, В этом положении передняя поверхность 17 щупа 15 располагается на одном уровне с опорной плоскостью 8 корпуса 7 матрицы,Зубчатая рейка 27 входит в зацепление с шестерней 31 прикрепленнойк оправке 32 датчика 33 углового положения. Датчик 33 установлен в специальном гнезде, выполненным в основании 26. Этот...
Устройство для коррекции угловпружинения ha трубогибочныхмашинах

Номер патента: 804081
Опубликовано: 15.02.1981
Авторы: Крутянский, Суховеев
МПК: B21D 7/12
Метки: коррекции, трубогибочныхмашинах, угловпружинения
...программоноситель 13 коррекции, контактирующий с роликом 14, установленным на рычаге 15, который неподвижно закреплен на кронштейне 3, На кронштейне 3 также размещен датчик 16 обратной связи системы ЧПУ, вал которого (не показан) соединен с осью 6 шестерни 8. Программоноситель 13 коррекции выполнен в виде набора кулачков, смонтированных на втулке 17, установленной на оси 7 с возможностьюскольжения вдоль нее и подпружиненной пружиной 18. Ось 7 выполнена полой, в нейнарезана резьба и ввинчен винт 19, упирающийся в штифт 20, закрепленнь 1 й во втулке 17 и расположенный в прорези 21 оси 7. 35Кронштейн 4 снабжен стрелкой 22, а настанине 11 трубогибочной машины закреплена шкала 23 постоянной коррекции. На оси 7 установлена шкала 24...
Способ гибки труб на малый радиус

Номер патента: 457260
Опубликовано: 07.08.1981
МПК: B21D 7/12
Метки: гибки, малый, радиус, труб
...заготовки и гибки изменяют в процессе деформирования в соответствии с их соотношением, выражаемым зави,симостью- а.й в".,- =4 ГОЕ /Уггде Ч - скорость продольной подачи)Чр " скорость гибки," 1 т 1 - коэфФициент, определякщийнаибольшую величину скорости продольной подачи заготовки на начальном участкегибки (тп 0,1 - 0,2сь - текущий угол изгиба трубы(определяемый в радианахи иэьеняющийся от 0 до 1 с/4 ),наиькеньшая толщина стенкив поперечном сечении трубы,бо - исходная толщина стенкитрубы;коэффициент, учитывакщий характер деформированного состоя 1 ния трубы при изгибе- Радиус гибки)показатель степени (К2, О)основание натурального логарифма.Благодаря такому характеру изменения отношения скоростей достигает"ся плавное увеличение степени...
Способ автоматического управления процессомгибки

Номер патента: 588698
Опубликовано: 07.08.1981
Автор: Морщинов
МПК: B21D 7/12
Метки: процессомгибки
...толщину детали и длины дуг а, в тн588698 формула изобретения ВНИИПИЗаказ 5854/46 Тираж 888 Подписное Филиал ППП "Патентф, г.ужгород, ул. Проектная и с, ЮФ и преобразуют измеренные величины в сигналы д,О и су.Разность сигналов аО - сб, вычисленная в устройстве 9, умножается в устройстве 10 на величину радиуса заданной кривизны Й внутренней поверхности 11 и поступает на положи.тельный вход сравнивакщего устройства 12, апроизведение сигнала а иа д , вычисленное в устройстве 13, поступает на отрицательный вход сравнивакщего устройства.Сигнал Х, равный разности Р (б - Ф ) - ОЬд, преобразуется с помощью регулятора 14 в сигналы,и 2, которые управляют исполнительными устройствами 15 и 16 соответственно валков 2 и 5.В качестве датчиков 6, 7 и...
Способ измерения радиуса кривизныизгибаемой заготовки

Номер патента: 653801
Опубликовано: 07.08.1981
Автор: Морщинов
МПК: B21D 7/12
Метки: заготовки, кривизныизгибаемой, радиуса
...по формулев=Е.,-к)( ) З к / где т - длина дуги с радиусси остаточной кривизны й, .- длина дуги, расположеннойконцентрично к дуге длиной В4 - расстояние между дугами,К - коэффициент пружинения.На чертеже показана схема опре" деления радиуса остаточной кривизны в процессе обработки на трехвалковой листогибочной машине.На этой схеме обрабатываемый 5 участок оЬсб детали 1, установленный между валками 2, 3 и 4 гибочной машины, в процессе измерения перемещают через плоскость максимального изгибающего момента ВЪ и путем интегри О рования в этой плоскости при помощи установленных на поверхностях 5 и 6 измерительных роликов 7 и 8,. снабженных преобразователями 9 и 10 угловых перемещений, измеряют длины дуг ао и Ьб, соответственно равные...
Устройство управления трубогибочной машиной

Номер патента: 893318
Опубликовано: 30.12.1981
Авторы: Дубинский, Кричевер, Овруцкий
МПК: B21D 7/12
Метки: машиной, трубогибочной
...посредством задатчика 8 коэффициентапропорциональности вводят в блок 7пропорциональной коррекции. Послеэтого устройство готово к работе..Перфокарта (либо перФолента) вводятся в блок 1 считывания. блок 1 считывания осуществляет считывание заданного угла гиба и преобразование информации о величине заданного угла гибки к виду, обеспечивающему работу сумматора 2 и других блоков устройства. бсли устройство собрано на элементах, осуществляющих обработку сигналов в цифровом виде, то на выход блока считывания информации о величине угла гибки будет представлена информация в виде кода числа. В случае реализации предлагаемого устройства на элементах, осуществляющих обработку сигналов в аналоговом фвиде, информация на выходе блока 1 считывания...
Гибочный станок

Номер патента: 940916
Опубликовано: 07.07.1982
Автор: Казанцев
МПК: B21D 7/12
...звездочку 6 вместе с верхней ступицей 8 и рычагом 9, Ступица 8 шатуном 10 подводит прижим 11 к трубе и прижимает ее к гибочному шаблону 4, Вместе с рычагом 9 поворачиваются конечный выключатель 12 и поводок 14. Сдвоенный шарнирный параллелограмм подводит колодку 20 к трубе. Приводной вал 2, гибочный шаблон 4, тормозной диск 5 остаются неподвижными под действием пружин 24 и тормозных колодок 25, Тормозное устройство 15 включено, Колодка 20 прижимается к трубе. В дальнейшем прижим 11 под действием гидроцилиндра 7, звездочки 6, верхней ступицы 8, шатуна 10 начинает поворачивать гибочный шаблон 4, преодолевая постоянно действующие усилия тормозных колодок 25.Поворот гибочного шаблона 4 продолжается до конечного выключателя 18. Конечный...
Станок для гибки труб

Номер патента: 1031561
Опубликовано: 30.07.1983
Авторы: Евсюков, Ломова, Луценко
МПК: B21D 7/12
...с направлаощими, свободно насаженных на оси кривошипа 3; прижимных ползунов 9, имеющих профиль изгибаемой трубы; зажима 10, привод которого осуществляется от пневмоцилищра через рычажную систему; подвижнойтраверсы 11 о закрепленными на ней на,двух осях гибочными шаблонами 12,подъем и опускание которой происходитпри помощи пневмоцилинцра по двумцилиндрическим направляющим 13, наверхних опорах которых установленыдва неподвижных стержня 14, имеющихв верхней части скос, автоматического задающего устройства 15, наклонного бункера 16 для заготовок, наклонного направляющего склиза 17 и цепного конвейера 18 с захватами, конечных выключателей 19 и золотников 20,предназначенных для управления работойпневмоцилиндров,30 Станок работает следующим...
Способ управления гибкой длинных заготовок

Номер патента: 1076165
Опубликовано: 28.02.1984
МПК: B21D 7/12
Метки: гибкой, длинных, заготовок
...50ного полособульба, применяемого дляизготовления гнутых деталей, определяют, в основном, высота и толщинастенки и пояска. Указанный прокатможет иметь при изготонлении существенные отклонения по высоте и толщине стенки, входящие в допуск на ихизготовление, однако существенновлияющие на процесс гибки.Кроме того, н процессе гибки высста стенки профильной заготовки,наиболее существенно влияющая на точность получения требуемой Формы детали, также может изменяться на существенную величину. 65 Таким образом, несоответствие высоты профиля стандартным требованиям и изменение ее в процессе гибкивлекут за собой значительные погрешности формы изделия в первом циклегибкиЦель изобретения - повышениепроизводительности процесса за счетполучения...
Устройство позиционирования к трубогибочному станку с программным управлением
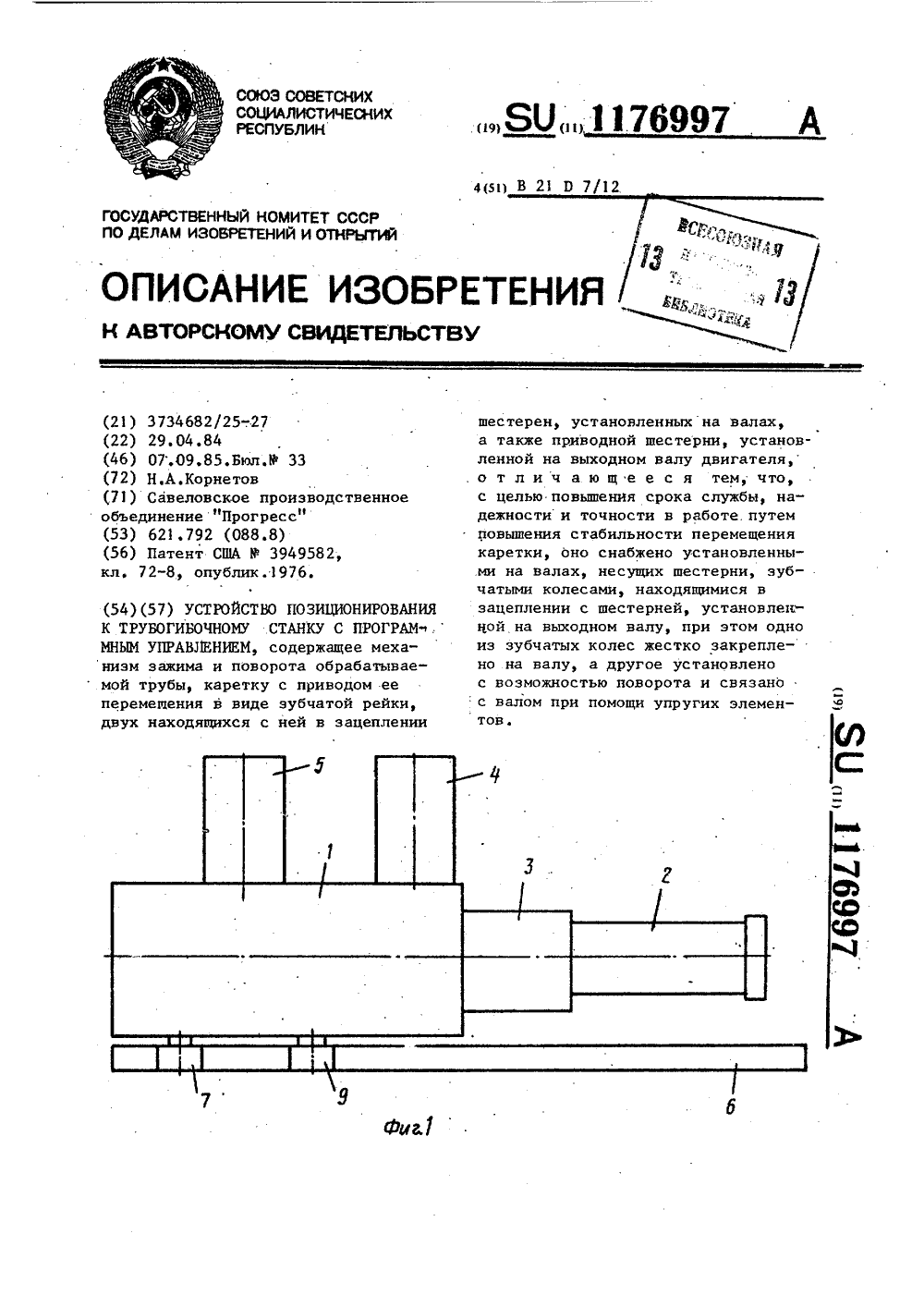
Номер патента: 1176997
Опубликовано: 07.09.1985
Автор: Корнетов
МПК: B21D 7/12
Метки: позиционирования, программным, станку, трубогибочному, управлением
...и 19 находятся н зацеплениис валом-шестерней 8, имеющей безлюфтовое соединение с валом двигателя 5,Двигатель 5 представляет собой элект родвигатель постоянного тока со встроенным датчиком обратной связи.Устройство работает следующим образом.При эавинчивании винта 24 происходит поворот полумуфты 20 относи-. тельно вала-шестерни 9, сопровождающийся сжатием пружин 22, которое вызывает появление крутящего момента. Под действием этого крутящего момента вал-шестерня 9 поворачивается до тех пор, пока ее зуб не упрется в зуб зубчатой рейки 6, зубчатое колесо 19 поворачивается относительно вала-шестерни 9, а .это вызывает поворот вала-шестерни 8 вместе с:налом двигателя 5, зубчатого колеса 16 и вала-шестерни 7 сопровождающийся выборкой зазоров....
Дозатор слеживающихся сыпучих материалов

Номер патента: 1194534
Опубликовано: 30.11.1985
Авторы: Гладышев, Голубцов, Губарев, Калицев, Каханов, Павлов
МПК: B21D 7/12
Метки: дозатор, слеживающихся, сыпучих
...друг друга на 45 - 90 , чтообеспечивает более равномерноессыпание материала в питатель при 25 относительно малой скорости вращения вала ворошителя 1-2 об./мин.Это же обстоятельство позволяет Изобретение относится к чернойметаллургии, а именно к устройствамдля легирования стали.Целью изобретения является обеспечение равномерности дозированияматериала.На фиг.1 показан дозатор для металлической стружки (нерабочее состояние );на фиг.2 - дозатор во времядозирования,Устройство содержит загрузочнуюемкость 1, шнековый питатель 2,электродвигатель 3, редуктор 4, вертикальный вал 5, ворошители 6, металлическую стружку 7.Устройство работает следующимобразом. В загрузочную емкость засыпают фрагментированную металлическую стружку, Двигатели...
Способ автоматического управления процессом гибки

Номер патента: 1209338
Опубликовано: 07.02.1986
МПК: B21D 7/12
...значенияосигнала 8, иэ 8, и присваивания полученному значению сигнала 41 О 1 с;2 О 25 3 О с 1 Я а знака, определенного разностьюи 8;, подается в сравнивающиеустройства 11 и 12, где происходитсоответственно алгебраическое сло,1 жение и вычитание его, взятого со своим знаком, с сигналами, подан-. ными из блока 6 системы автоматического управления согласно известному способу соответственно у и Полученные в сравнива 1 ощих устройствах 1 и 12 сигналы 1+ .ь и Е -далее подаются в исполнительные устройства 13 и 14, которые перемещают боковые валки 2 и 3 на величину соответствующего сигнала, причем знаки сложения-вычитания У и Е меняются на противоположный при отрицательном значении и сохРаняются до по сл едующе го отрицательно го Ь...
Узел зажима трубогибочной машины

Номер патента: 1237277
Опубликовано: 15.06.1986
Авторы: Банников, Белоненко, Ещенко, Снегирев, Суховеев, Хоперсков
МПК: B21D 7/12, B23B 31/00, B23Q 3/06 ...
Метки: зажима, трубогибочной, узел
...16,параллельны оси 19поворотного вала 2. В корпусе 1 смонтированы также два гидроцилиндра 20,штоками 21 связанные с нажимной втулкой 4. Гидроцилиндры 20 расположеныпараллельно друг другу и оси 19 вала2 в плоскости, проходящей черезось 19.Гидрораспределитель 22 соединяетгидролинями 23 и 24 полости гидроци- .линдров 20 с напорной и сливной магистралями, К гидролинии 24 подключено реле 25 давления, Позициями 26и 27 обозначены соответственно электромагниты прямого и обратного ходовгидрораспределителя 22. В корпусе 1установлен конечный выключатель 28,управляющий элемент 29 которого закреплен на нажимной втулке 4,Силовая цепь системы управленияузлом зажима содержит подключенныек источнику напряжения Б 1 обмоткуЭ 1 электромагнита 26...
Устройство для измерения радиуса кривизны

Номер патента: 1323163
Опубликовано: 15.07.1987
Авторы: Бродский, Волков, Зильберблат, Лазаренко, Репченко, Шамрай
МПК: B21D 7/12
...извходов селектора 3 кодов.В исхо 1 псом положении боковые валки оп гшены вниз на один горизонтальный уровень с нижним валком. В процессе гибки боковые валки перемещаются вверх, при этом радиус изгибазаготовки уменьшается,Пр"длагаемое устройство работает следуощим образом.В режиме гибки переключатель 2 режимов погсключает к селектору кодов программный залатчик 1, Сигнал задания с программного эадатчика 1 через 5 10 15 20 25 30 35 40 45 50 55 селектор 3 кодов поступает на первыйвход арифметического устройства 4,на второй вход которого подается сигнал с датчика 6 положения боковых валков.При наличии рассогласования на входеарифметического устройства 4 включается привод перемещения боковых валков и система отрабатывает...
Устройство управления перемещением сматываемого с рулона длинномерного материала

Номер патента: 1345171
Опубликовано: 15.10.1987
Авторы: Капустник, Кокорев, Павлов, Светличный, Суярко
МПК: B21D 7/12, G05B 19/19
Метки: длинномерного, перемещением, рулона, сматываемого
...55, реле 56 с контактом57, конечный выключатель 58 с контактами 59 и 60 и электромагнитную муфту 61." После появления сигнала на выходеэлемента И 14 одновибратор 55 форми- Зорует сигнал на включение катушки 56реле, Контактом 57 этого реле включается электромагнитная муфта 61, прижимающая диск 51 к маховику 49. Ножевая балка 54 начинает опускаться,При этом включается конечный выключатель 58, который своим замыкающимконтактом 59 удерживает электромагнитную муфту 61 на самоблокировке.Размыкающий контакт 60 этого выключа- отеля используется в цепи формирования сигнала на входе элемента И 13.После возвращения ножевой балки 54в исходное (верхнее) положение (ножевная балка 54 возвращается в исходное положение после того, как маховик 49...