Устройство позиционирования к трубогибочному станку с программным управлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1176997
Автор: Корнетов
Текст
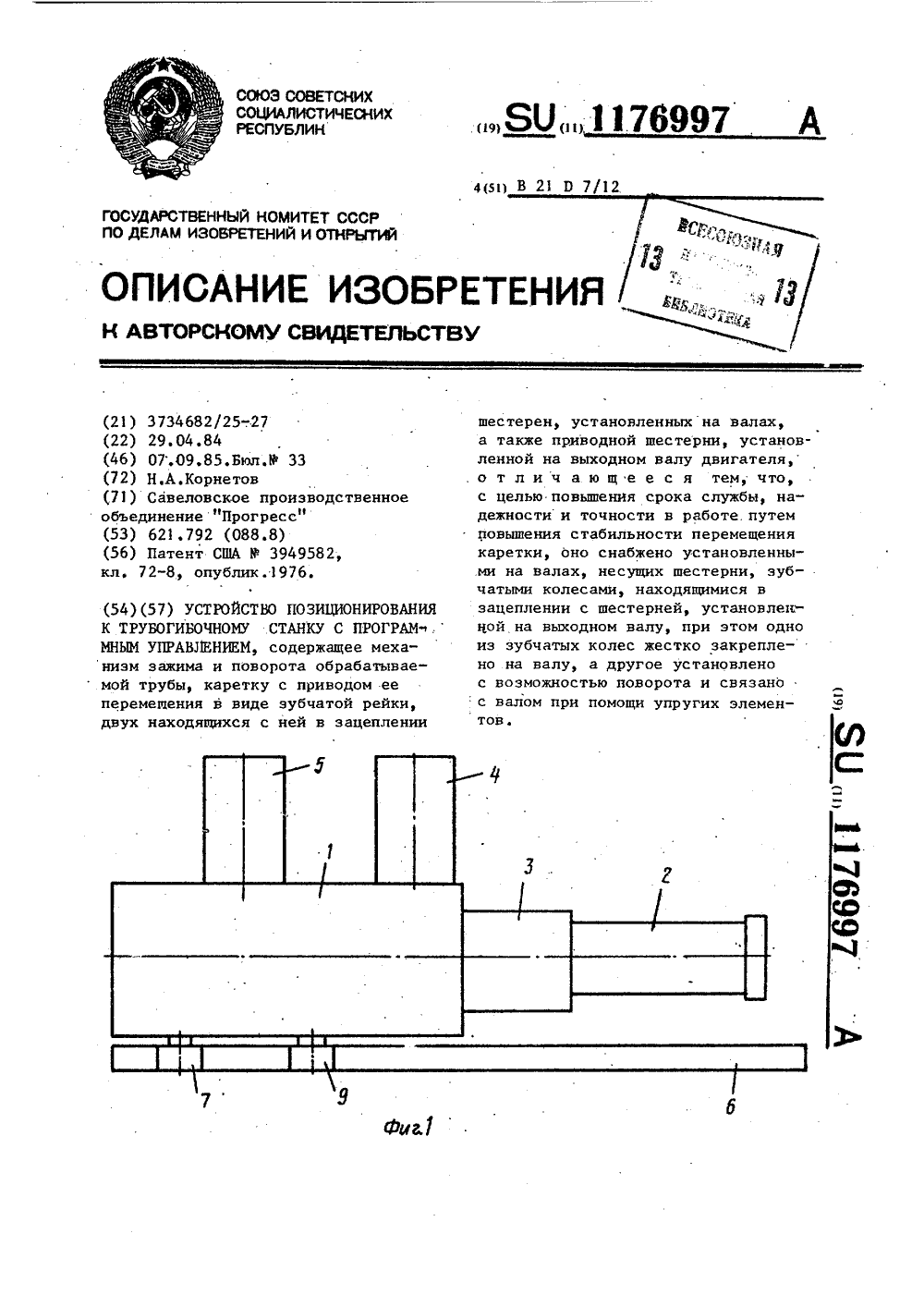
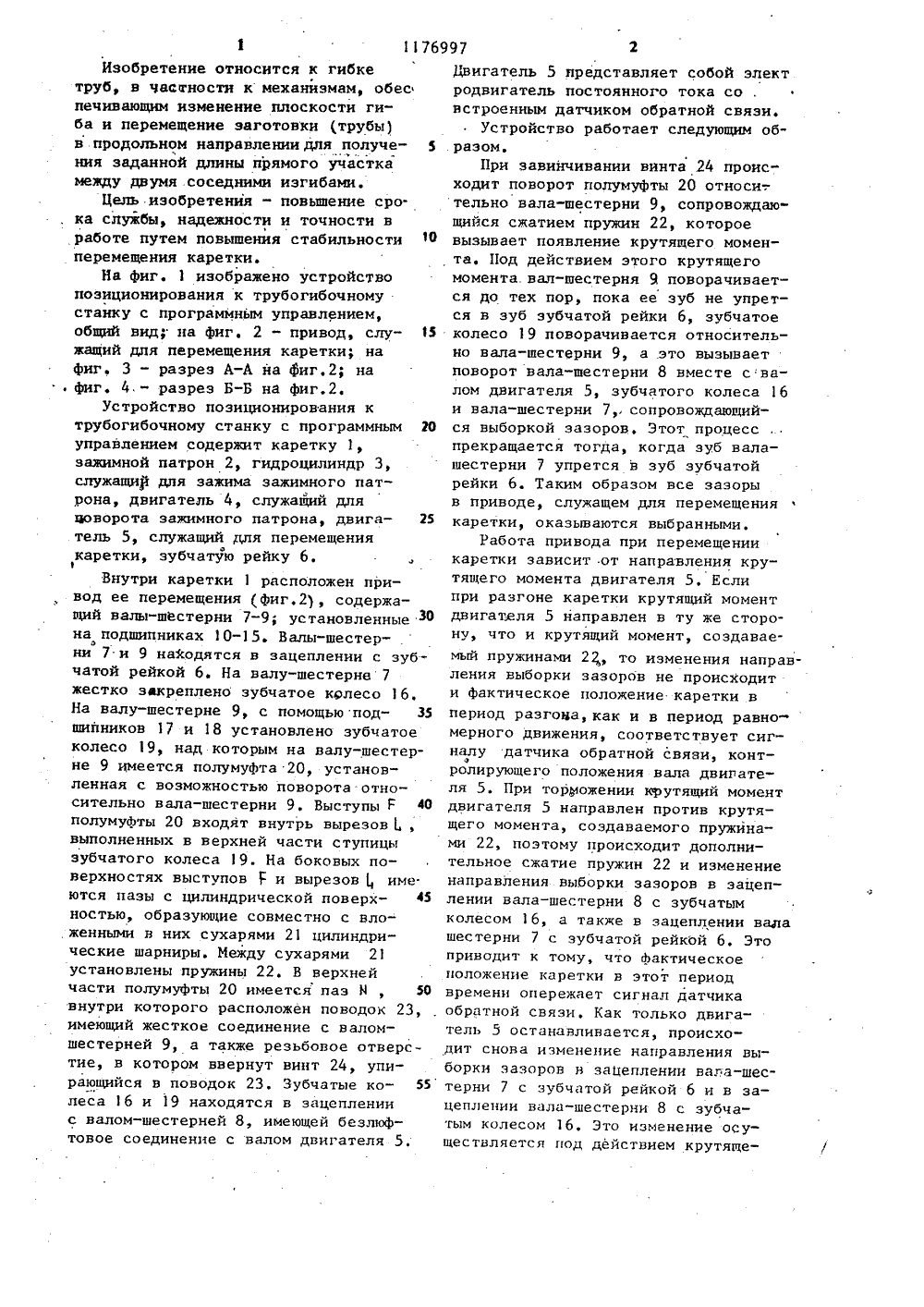
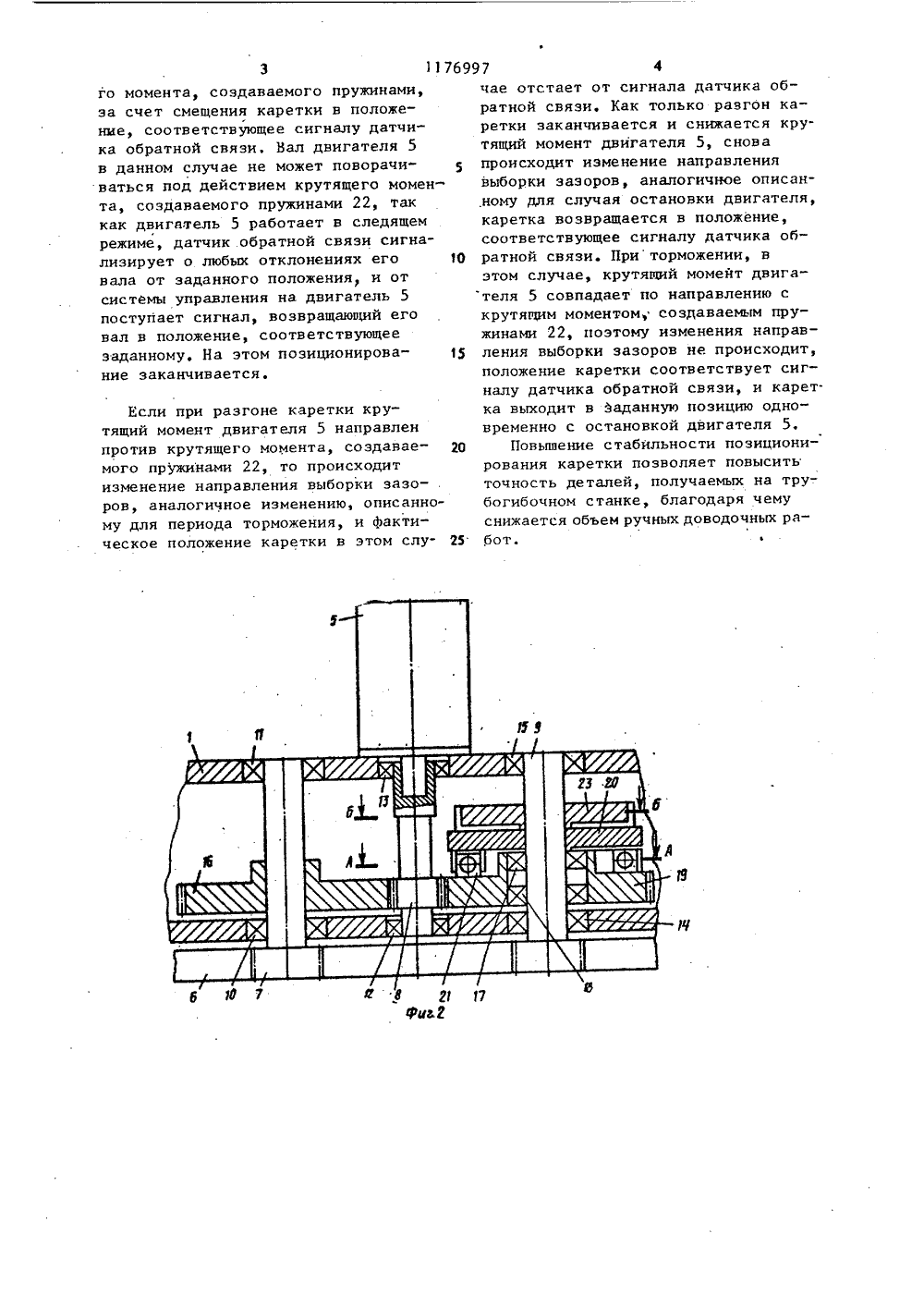
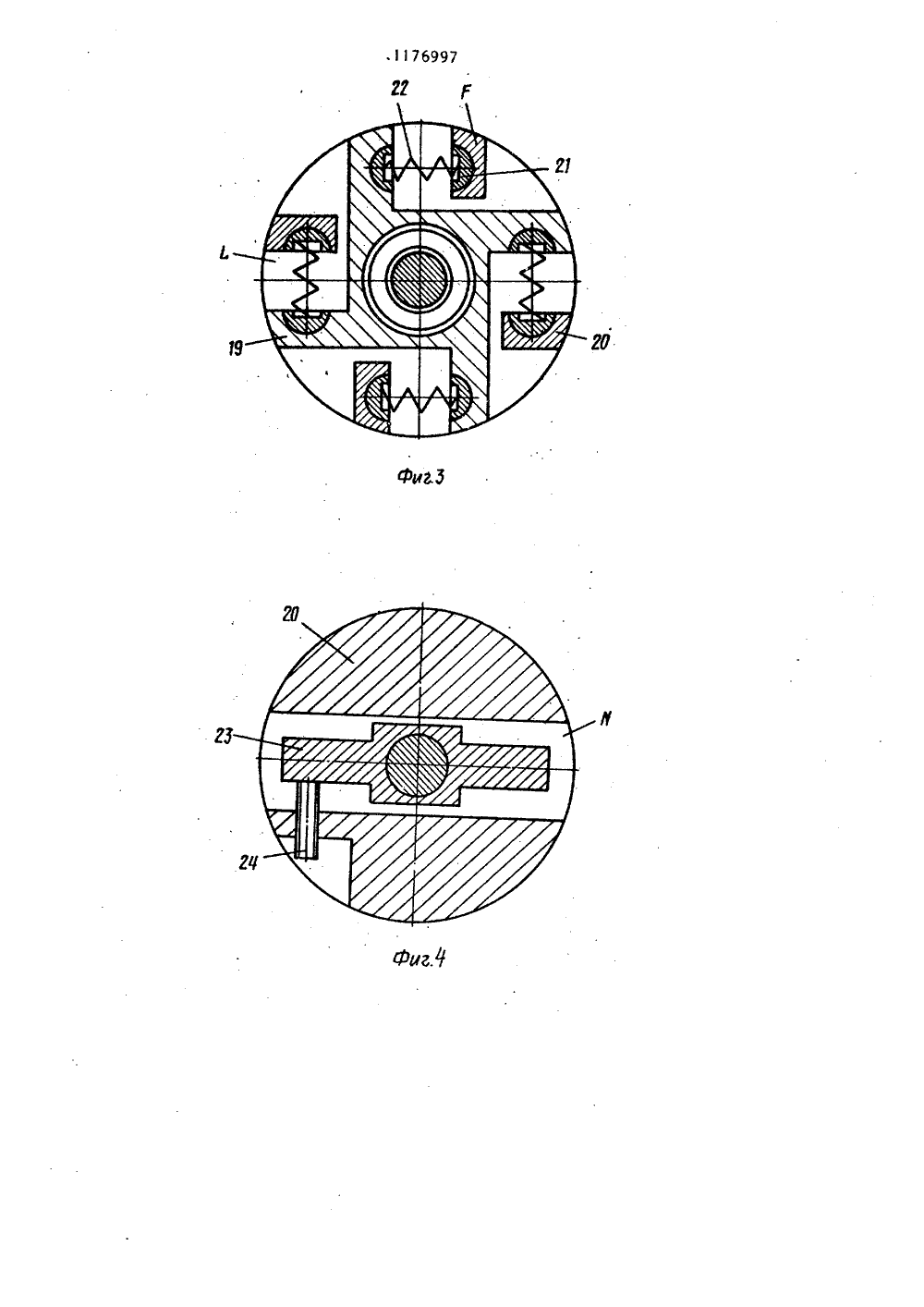
(51) В 21 0 7/12 УДАРСТВЕННЫЙ КОМИТЕТ СССРДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИ К АВТОРСКОМУ РЕ 7 алах, станов теля,У 33 что,нае производственногресс"88.8)В 3949582,ик.1976. утемени ны- уб(54) (57) УСТРОЙСТВО К ТРУБОГИБОЧНОМУ СТ МНЬМ УПРАВЛЕНИЕМ, со низм зажима и поворо мой трубы, каретку с перемещения в виде з двух находящихся с н ен; тернеи, уст валу, при э с жестко за угое устано оворота и с одн реплеленоязано и упруги лем(21) 3734682/2 (22) 29.04.84 (46) 07 А 9,85. (72) Н.А.Корне (71) Савеловск объединение "П (53) 621.792 ( (56) Патент США кл. 72-8, опуб О ЗИЦИОНИРОВАНИЯ АНКУ С ПРОГРАМ. держащее меха- а обрабатываеприводом еебчатой рейки, й в зацеплении 801 3 76997 А шестерен, установленных на ва также приводной шестерни, уленной на выходном валу двига. отличающееся тем,с целью повышения срока службьдежностии точности в работе.пповышения стабильности перемещкаретки, оно снабжено установл.ми на валах, несущих шестерничатыми колесами, находящимися зацеплении с ше ной на выходном из зубчатых кол но на валу, а д с возможностью с валом при пом тов,Изобретение относится к гибкетруб, в частности к механизмам, обеспечивающим изменение плоскости гиба и перемещение заготовки (трубы)в продольном направлении для получения заданной длины прямого участкамежду двумя соседними изгибами.Цель изобретения - повышение сро.ка службы, надежности и точности вработе путем повышения стабильности 10перемещения каретки.На фиг. 1 изображено устройствопозиционирования к трубогибочномустанку с программным управлением,общий вид; на фиг. 2 - привод, служащий для перемещения каретки; нафиг. 3 - разрез А-А на 4 иг.2; на. фиг. 4. - разрез Б-Б на фиг,2.Устройстно позиционирования ктрубогибочному станку с программным 20управлением содержит каретку 1,зажимной патрон 2, гидроцилиндр 3,служащими для зажима зажимного патрона, двигатель 4, служащий дляцоворота зажимного патрона, днигатель 5, служащий для перемещениякаретки, зубчатую рейку 6.,ЭВнутри каретки 1 расположен привод ее перемещения (фиг.21, содержащий валы-шестерни 7-9; установленные З 0на подшипниках 10-15. Валы-шестерэни 7 и 9 наодятся в зацеплении с зубчатой рейкой 6. На валу-шестерне 7жестко закреплено зубчатое кдлесо 16.На валу-шестерне 9, с помощью подшипников 17 и 18 установлено зубчатоеколесо 19, над которым на валу-шестерне 9 имеется полумуфта 20, установленная с возможностью поворота относительно вала-шестерни 9. Выступы Р 40полумуфты 20 входят внутрь вырезов .,выполненных в верхней части ступицызубчатого колеса 19. На боковых поверхностях выступов Г и вырезов 1, име.ются лазы с цилиндрической поверхностью, образующие совместно с вложенными н них сухарями 21 цилиндрические шарниры. Между сухарями 21установлены пружины 22. В верхнейчасти полумуфты 20 имеется паз М , 50внутри которого расположен поводок 23,имеющий жесткое соединение с валомшестерней 9, а также резьбовое отверстие, в котором ввернут винт 24, упирающийся в поводок 23. Зубчатые колеса 16 и 19 находятся н зацеплениис валом-шестерней 8, имеющей безлюфтовое соединение с валом двигателя 5,Двигатель 5 представляет собой элект родвигатель постоянного тока со встроенным датчиком обратной связи.Устройство работает следующим образом.При эавинчивании винта 24 происходит поворот полумуфты 20 относи-. тельно вала-шестерни 9, сопровождающийся сжатием пружин 22, которое вызывает появление крутящего момента. Под действием этого крутящего момента вал-шестерня 9 поворачивается до тех пор, пока ее зуб не упрется в зуб зубчатой рейки 6, зубчатое колесо 19 поворачивается относительно вала-шестерни 9, а .это вызывает поворот вала-шестерни 8 вместе с:налом двигателя 5, зубчатого колеса 16 и вала-шестерни 7 сопровождающийся выборкой зазоров. Этот процесс прекращается тогда, когда зуб вала- шестерни 7 упрется в зуб зубчатой рейки 6. Таким образом нсе зазоры н приводе, служащем для перемещения каретки, оказываются выбранными.Работа привода при перемещении каретки зависит от направления крутящего момента двигателя 5, Если при разгоне каретки крутящий момент двигателя 5 направлен н ту же сторону, что и крутящий момент, создаваемый пружинами 2, то изменения направления выборки зазоров не происходит и фактическое положение каретки впериод разгоыа, как и в период равномерного движения, соответствует сигналу датчика обратной связи, контролирующего положения вала двигателя 5. При торможении крутящий момент двигателя 5 направлен против крутящего момента, создаваемого пружинами 22, поэтому происходит дополнительное сжатие пружин 22 и изменение направления выборки зазоров в зацеплении вала-шестерни 8 с зубчатымколесом 16, а также в зацеплении нала шестерни 7 с зубчатой рейкой 6, Этоприводит к тому, что фактическоеположение каретки и этот периодвремени опережает сигнал датчикаобратной связи. Как только двигатель 5 останавливается, происходит снова изменение направления выборки зазорон н зацеплении нала-шестерни 7 с зубчатой рейкой 6 и н зацеплении нала-шестерни 8 с зубчатым колесом 16. Это изменение осущестиляется под действием крутящего момента, создаваемого пружинами,эа счет смещения каретки в положение, соответствующее сигналу датчика обратной связи. Вал двигателя 5в данном случае не может поворачиваться под действием крутящего момента, создаваемого пружинами 22, таккак двигатель 5 работает в следящемрежиме, датчик .обратной связи сигнализирует о любых отклонениях его 0вала от заданного положения, и отсистемы управления на двигатель 5поступает сигнал, возвращающий еговал в положение, соответствующеезаданному. На этом позиционирование заканчивается. Если при разгоне каретки крутящий момент двигателя 5 направлен против крутящего момента, создавае мого пружинами 22, то происходит изменение направления выборки зазоров, аналогичное изменению, описанному для периода торможения, и фактическое положение каретки в этом слу чае отстает от сигнала датчика обратной связи. Как только разгон каретки заканчивается и снижается крутящий момент двигателя 5, снова происходит изменение направления выборки зазоров, аналогичное описан,ному для случая остановки двигателя, каретка возвращается в положение, соответствующее сигналу датчика обратной связи. Приторможении, в этом случае, крутящий момент двигателя 5 совпадает по направлению с крутящим моментом, создаваемым пружинами 22, поэтому изменения направления выборки зазоров не происходит, положение каретки соответствует сигналу датчика обратной связи, и карет. ка выходит в заданную позицию одновременно с остановкой двигателя 5.Повышение стабильности позиционирования каретки позволяет повысить точность деталей, получаемых на трубогибочном станке, благодаря чему снижается объем ручных доводочных работ.
СмотретьЗаявка
3734682, 29.04.1984
САВЕЛОВСКОЕ ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ПРОГРЕСС"
КОРНЕТОВ НИКОЛАЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: B21D 7/12
Метки: позиционирования, программным, станку, трубогибочному, управлением
Опубликовано: 07.09.1985
Код ссылки
<a href="https://patents.su/4-1176997-ustrojjstvo-pozicionirovaniya-k-trubogibochnomu-stanku-s-programmnym-upravleniem.html" target="_blank" rel="follow" title="База патентов СССР">Устройство позиционирования к трубогибочному станку с программным управлением</a>
Реле направления мощности прямой или обратной последовательности фаз

Номер патента: 111844
Опубликовано: 01.01.1958
Автор: Воскресенский
МПК: H01H 83/18
Метки: мощности, направления, обратной, последовательности, прямой, реле, фаз
...1 1), ПОР;3 ИПЙЯ О(01011.Й 1.0- ГО)ОГО 1 ИОЧСИЙ Н 1 1 ИО(ТЬ ТОКОВ Д(3; Ч)33.При таком подксиочс;пи обмотокК И)1 :ОД 3 ОДЯ 1 с Я ПИ(И:Ы( ТОКИ 11 Иси)51 Ж(НИ 51 С 1;1;30 ГЬ)1 СДВИГО.,1, ООССГС 1 И 3101 ЦИМ П 13 1)С.".; СО 1 СТЛП 1 Я.; 3 ССИММЕТРЧНЫ.(, 1)ЖИ МОВ Т)ЕКПредцет. изобретения Отв. редактор Ситников Стандартгиз. и п. 12% 195 50 Цена 25 кол ъем 0,1 и. л. Тираж ипография Комитета по делам изобретений и открытий при Совете Министров ССС Москва, 11 еглинная, д. 23. Зак. 3354фазной системы создание и магциго.проводе реле потоков, пропорц;1 о.нальных "составляющим прямой цлиобратной йо 01 едовательности. Реле направления мощности прямой или обратной последовательности фаз трехфазной системы, выполненное на базе четырехполю:цой...
Устройство для передачи крутящего момента от ведущего вала двигателя к ведомым валам движителей

Номер патента: 538938
Опубликовано: 15.12.1976
Автор: Зейгер
МПК: B63H 23/06
Метки: вала, валам, ведомым, ведущего, двигателя, движителей, крутящего, момента, передачи
...число колен ведущего коленчатого вала по условиям динамического уравновешивания и исключения мертвых положений должно быть не менее шести. Шейки 2 - 7 каждого колена этого вала связаны с соответствующими шсйкамц 8 - 13 колец отдельных соосных частей 14 и 15 ведомого коленчатого вала, причем части 14 ц 15 соединены с ведомыми валамц движителей (на чертеже не показаны). Кинематцческая связь между шейками ведущих ц ведомых коленчатых валов осуществляется при помощи промежуточной трансмиссии в виде кривошипно-шатунных крейцкопфных механизмов, состоящих из шатунов 16, 17 и ползунов 18, 19, связанных между собой тягамп 20.Порядок расположения шеек 13, 12 и 11 части 14 (см, фиг. 2) ведомого коленчатого вала по окружности одинаков с порядком...
Устройство для передачи крутящего момента от ведущего вала двигателя к параллельно расположенному ведомому валу движителя

Номер патента: 420498
Опубликовано: 25.03.1974
МПК: B63H 21/28
Метки: вала, валу, ведомому, ведущего, двигателя, движителя, крутящего, момента, параллельно, передачи, расположенному
...с кривошипно-шатунными механизмами, крейцкопфы которых связаны тягами.На чертеже изображено предлагаемое устройство.С ведущим валом (на чертеже не показан) связан коленчатый вал 1, число колен которого, по условиям динамического уравновсшения и исключения мертвых положений, должно быть не менее трех. Каждое колено этого вала связано с противолежащим коленом коленчатого вала 2, соединенного с ведомым валом (на чертеже не показан), Кинематическая связь осуществляется через два кривошипно-шатунных креицкопфпых механизма, состоящих из шатунов 3 и 4 и крейцкопфов, ползуны 5 и 6 которых связаны между собой тягами 7.5 Устройство работает следующим образом.Вращение от ведущего вала передается коленчатому валу 1, от которого через шатуны...
Способ определения составляющих суммарного момента сопротивления проворачиванию коленчатого вала двигателя внутреннего сгорания

Номер патента: 1725082
Опубликовано: 07.04.1992
Автор: Григорьев
МПК: G01M 15/00
Метки: вала, внутреннего, двигателя, коленчатого, момента, проворачиванию, сгорания, сопротивления, составляющих, суммарного
...сопротивления от дефо ма ии.д ф р ации.в состоянии деформации Мс, например, пу- пе а ы вигателя идвигателя М - в ф нк ииот пе репада температур двн мерного нагрева. о его ве- ленчатого вала;личине находят момент сопротивления от 15 момент сопротивления проворачивадеформации двигателя Мд по следующей нию коленчатого вала и и тматематической зависимости:нию коленчатого вала при отключенныхвспомогательных механизмах Мс 2 - в функд= с; - г (5) цИИ От тЕМПЕратуОЫ дВИГатЕЛя И ЧаСтатЫЗатем определяют момент сопротивле- вращения коленчатого вала;ния проворачиванию коленчатого вала двигателя при отключенных вспомогательныхмоментсопротивления партрения го яр р орячих вспомогательных механизмов Мгв - вмеханизмах Мс 2, по величине которого...
Лентопротяжный механизм для устройств магнитной запнсиизвестные лентопротяжные механизмы для устройств магнитной записи, содержащие соединенный с нриводным двигателем ведущий вал, на котором укреплен маховик, н

Номер патента: 177111
Опубликовано: 01.01.1965
Автор: Голубев
МПК: G11B 15/29
Метки: вал, ведущий, двигателем, записи, запнсиизвестные, котором, лентопротяжные, лентопротяжный, магнитной, маховик, механизм, механизмы, нриводным, содержащие, соединенный, укреплен, устройств
...12. Дополнительный маховик приводится в движение от ведущего вала через безлюфтовые шестерни 5, 4 и 3, причем паправ ление движения дополнительного маховика обратно направлению движения основного. При крутильных смещешях корпуса механизма (на чертеже не показа) как ца основном, так и на дополнительном маховиках возникают моменты от цнерццо шых сил, направленные в сторону, противоположную смещецшо корпуса. Эти моменты через рабочие шестерни передаются на паразитную ц в свою очередь создают моменты относительно оси вращения паразцтцой шестерни, направленные в противоположные стороны, Прц подобранных определенным образом соотношениях эти моменты могут бь 1 ть равны, и тогда получится требуемая взаимная компенсация инерционных сил от...
Предыдущий патент: Инструмент профилегибочного стана
Следующий патент: Штамп для пробивки и отбортовки отверстий
Случайный патент: Самоходная машина для срезки грунта по дну и откосам кюветов (кюветоочиститель)