Следящая система
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 885970
Авторы: Александров, Закорюкин, Олейников, Поддубный
Текст
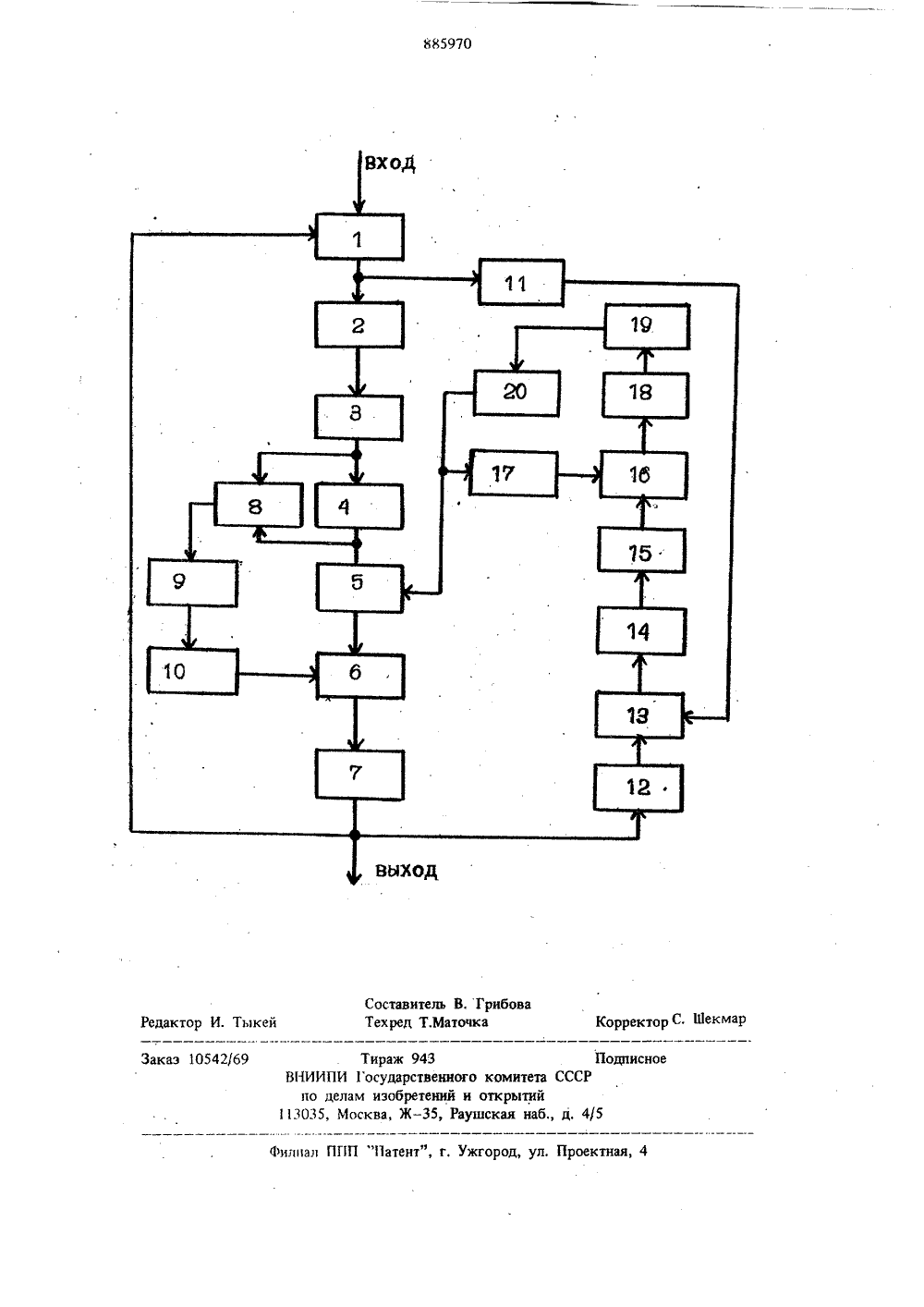
Союз СоветскихСоциапнстическикРеспублик ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ и 885970Дата опубликования описания 30,11.81(54) СЛЕДЯЩАЯ СИСТЕМА ЮМИзобретение относится к автоматическому управлению и может быть использовано в качестве силовых следящих приводов с компенсацией упругих деформаций и люфта в редукторе в условиях повышенных требований к точности работы н помехоустойчивости при наличии в управляюшем сигнале высокочастотных помехИзвестна следящая система, содержащая объект регулирования, измеритель угла рассогласования, выход которого через последовательно соединенные сумматор и усилитель подключен1 О ко входу исполнительного двигателя и блок дифференцнаторов, выход которого связан со входом сумматора. Между валом исполнитель.ного двигателя и валом объекта включен дат 15 чик крутящего момента, На валу исполнительного двигателя установлен датчик угловых ускорений. Выход датчика крутящего момента через первый блок преобразования, а выход датчика угловых ускорений через второй блокО преобразования подключены ко входам блока дифференцнаторов, Управляющий сигнал поступает через сумматор и усилитель на исполнительный двигатель, передающим врашенне на нагрузку. Действие внешнего возмущающего момента, приложенного к объекту регулирования, воспринимается датчиком крутящего момента и датчиком угловых ускорений вала исполнительного двигателя, и после преобразования вводится на вход сумматора в виде ком. пенснруюшей обратной связи 11.Недостатком зтой следящей системы является то, что наличие упругих деформаций и люфтов существенно снижают точность слежения в процессе работы следящей системы. Кроме того, наличие в управляющем сигнале высоко. частотной помехи приводит к значительному снижению точности слежения и помехоустойчивости следяшей системы.Известна также следящая система, которая содержит управляющий блок, основнои и дополнительный двигатели, подключенные через диф. ференциал к двухступенчатому редуктору, свя. занному с объектом регулирования, двухполюс ный датчик угла, подключенный к выходу пер. вой ступени, многополюсный датчик угла, уста. новленный на выходном валу. Выход двух. полюсного датчика угла соединен с электричес885970 4жения текущего углового положения выходноговала редуктора с корректирующей добавкойпроисходит компенсация влияния люфтов,упругих деформаций и возмущений, связанныхс нагрузкой.При появлении в процессе эксплуатации вуправляющем сигнале высокочастотной помехине обеспечивается высокая точность слежения. и помехоустойчивость следящей системы с10 компенсацией упругих деформаций и люфтав редукторе 3).Недостатком известной системы является,малая точность слежения и помехоустойчивость. ким входом многополюсного датчика угла, вы.ход которого подключен ко входу управлян.щего блока. Управляющий сигнал подаетсячерез блок управления на основной двигатель,передающий вращение на нагрузку через дифференциал и редуктор. Действие нагрузки приводит к появлению упругих деформаций в ре.дукторе, Разность угловых положений валовна входе и выходе второй ступени редуктора,вызванная упругими деформациями, измеряет.ся двухполюсным и многополюсным датчикамиуглов поворота и вводится через управляющийблок, дополнительный двигатель.и дифференци.ал в качестве компенсирующей добавки 21.Недостатком этой следящей системы являет.ся то, что влияние нежесткости редуктора наточность слежения не устраняется. Наличие упругих деформаций и люфтов в редукторе взначительной мере снижают точность слежения,Кроме того, в процессе эксплуатации управляющий сигнал содержит высокочастотную помеху,Это приводит к тому, чтоточность и помехоустойчивость следящей системы существенноснижаются,Наиболее близкой по технической сущностик предлагаемому является следящая система25с компенсацией упругих деформаций и люфтав редукторе, содержащая последовательно сое.диненные измерительный блок, на которыйподан входной сигнал, первый усилитель, исполнительный двигатель, корректирующий двигатель, выполненный в виде гидроцилиндра споворотной лопастью, объект регулирования,выход которого подан на вход измерительногоблока, а также блок компенсации, состоящийиз измерителя разности углов поворота, входы 35которого подключены к входному и выходному валам редуктора, а выход включен навход последовательно соединенных второгоусилителя и преобразователя, выход которогоподан на вход корректирующего двигателя.Работа следящей системы заключается в следующем, При подаче сигнала с измерительногоблока на выходе исполнительного двигателяустанавливается некоторое значение скорости.Если угловые положения входного и выходноговалов редуктора совпадают, то сигнал управления блоков компенсации, формируемый изме.рителем разности утлов поворота входного ивыходного валов редуктора равен нулю. 40 45 50 55 При появлении углового рассогласования из.за наличия люфтов, упругих деформаций в редукто. ре и возмущений, связанных с нагрузкой, сигнал рассогласования с измерителя разности углов поворота входного и выходного валов редуктора подается через второй усилитель на преобразователь, управляющий работой корректирую. щего двигателя, который обеспечивает введение корректирующей добавки, В результате сло. Цель изобретения - повышение точностии помехоустойчивости следящей системы с ком.пенсацией упругих деформаций и люфта в редук торе.Поставленная цель достигается тем, что вследящую систему, содержащую последовательно соединенные измерительный блок, первыйусилитель, исполнительный двигатель, первыйредуктор, дифференциал, первый корректирующий двигатель, объект регулирования, выходомподключенный к второму. входу измерительно.го блока и первому датчику угла, а такжеизмеритель угла рассогласования, два входа которого подключены соответственно к входу ивыходу первого редуктора, а выход - черезпоследовательно соединенные второй усилитель,преобразователь ко второму входу первогокорректирующего двигателя, введены ограничитель и последоватЕльно соединенные сумматор,фильтр, экстраполятор, блок сравнения, третийусилитель, второй корректирующий двигатель,второй редуктор и второй датчик угла, выходи вход которого подключены к вторым входамсоответственно блока сравнения и дифференциала, выход ограничителя соединен с первымвходом сумматора, второй вход которого под.ключен к выходу первого датчика угла, а входограничителя соединен с выходом измерительного блока,На чертеже представлена функциональнаясхема предлагаемой системы.Следящая система содержит последователь.но соединенные измерительный блок 1, первыйусилитель 2, исполнительный двигатель 3, первый редуктор 4, дифференциал 5, первый кор.ректируюший двигатель 6, выполненный, например, в виде гидроцилиндра с поворотной лопастью, объект регулирования 7, охваченныйотрицательной обратной связью.Канал компенсации упругих деформацийи люфта в редукторе состоит из последовательно соединенных измерителя 8 угла рассогласования, который соединен с входным и выход.ным валами редуктора 4, второго усилителя 9,преобразователя 10, подключенного к коррек.тирующему двигателю 6,5 10 5 20 25 ЭО 35 ао 45 0 И Канал формирования низкочастотной составляюгцей спектра дополнительного про раммного сигнала состоит из ограничителя 1, входкоторого подключен к выходу измерительногоблока 1, соединенных последовательно датчика12 угла, вход которого подключен к выходуобъекта 7 регулирования, сумматора 13, фильтра 14, экстраполятора 15, узла 16 сравнения,датчика 17 угла третьего усилителя 18, второгокорректирующего двигателя 19 и второгоредуктора 20, который соединен со вторымвходом силового дифференциала 5, причем вы.ход ограничителя 11 соединен со вторым входомсумматора 13, а выход датчика 17 углаповорота подключен на второй вход узла 16сравнения,Устройство работает следующим образом.При подаче управляющего сигнала, содержащего высокочастотную помеху на выходе измерительного блока 1 появляется рассогласованиеи исполнительный двигатель 3 приходит в движение. Если угловые положения входного ивыходного валов редуктора совпадают, то сигнал управления каналом компенсации, формируемый измерителем 8 разности углов поворота,равен нулю. При появлении углового рассогласования из-за наличия люфтов, упругих деформаций в редукторе и возмущений, связанныхс нагрузкой, сигнал рассогласования каналакомпенсации поступает через второй усилитель9 на преобразователь 10, управляющий первымкорректирующим двигателем 6. В результатесложения текущего углового положения выходного вала редуктора с компенсирующей добавкой, вводимой первым корректирующим двигателем, влияние люфтов, упругих деформацийи возмущений, связанных с нагрузкой,существенно уменьшается.Для обеспечения повышения точности слежения и помехоустойчивости сигнал рассогласования с блока 1 поступает через ограничитель 11на сумматор 13, на который также подаетсясигнал с датчика 12, Суммарный сигнал прохо.дит через низкочастотный фильтр 14 и экстраполятор 15, В результате формируется дополнительный программный сигнал, содержащийнизкочастотную составляющую спектроуправляющего сигнала. Экстраполятор необходим дляформирования упреждения и обеспечения условий устойчивости следящей системы. Второйзамкнутый контур, состоящий из блока сравнения 16, третьего усилителя 18, второго корректирующего двигателя 19, редуктора 20, датчика 17, должен быть широкополосным и обеспечивать введение в контур следящей системы, через силовой дифференциал дополнительногопрограммного сигнала с низкочастотным спектром, Путем настройки параметров блока 11ограничителя и фильтра 4 устанавливаются такие параметры низкочастотной составляющейспектра программного сигнала, которые обеспечивают существенное повышение точностислежения и помехоустойчивости следящей сис.темы с компенсацией упругих деформацийс люфта в редукторе,Существенное преимущество системы в точности имеет место в случае, когда обеспеченавысокая корреляция между управляющими программным сигналами, Так, например,для значений коэффициентов корреляции 0,2,0,6 и 0,8 выигрыш по точности составляетсоответственно 4; 56 и 278 процентов, Эффек.тивность с точки зрения помехоустойчивостиможет быть определена как отношение оптимальных значений .дисперсии ошибки воспроизведения прототипа ЛЭщ 1 ии предлагаемой следящейсистемы ХЭ 4, Выполнение условияЪв,Э,в;Ъсвидетельствует о преимуществе следящей системы с дополнительным программным сигналом,Таким образом, формируя дополнительныйпрограммный сигнал в соответствии с предложенной схемой, можно обеспечить значительное по.вышение точности слежения и помехоустойчивости.Формула изобретенияСледящая система, содержащая последовательно соединенные измерительный блок, первый усилитель, исполнительный двигатель, первый редуктор, дифференциал, первый корректирующий двигатель, объект регулирования,выходом подключенный к второму входу измерительного блока и первому Датчику утлаа также измеритель угла рассогласования, двавхода которого подключены соответственно квходу и выходу первого редуктора, а выход -через последовательно соединенные второйусилитель, преобразователь ко второму входупервого корректирующего двигателя, о т л и.ч а ю щ а я с я тем, что, с целью повышения точности и помехоустойчивости системы,в нее введены ограничитель и последовательносоединенные сумматор, фильтр, экстраполятор,блок сравнения, третий усилитель, второй кор.ректирующий двигатель, второй редуктор ивторой датчик угла, выход и вход которогоподключены ко вторым входам соответственноблока сравнения и дифференциала, выход ограничителя соединен с первым входом сумматора,второй вход которого подключен к выходупервого датчика угла, а вход ограничителя соединен с выходом измерительного блока.Источники информации,принятые во внимание при экспертизе1, Авторское свидетельство СССР Иф 376752,кл. 6 05 В 11/01, 1971.2. Авторское свидетельство СССР Мф 366454,кл. 6 ОБ В 11/12, 1971.3. Авторское свидетельство СССР У 376753,кл, б 05 В 11/06, 1973 Гпоототип)., Проектная, 4 едактор И. Тык Составитель В, ГрибоТехрел Т,Маточка Тираж 943 ВНИИПИ Государственног по делам иэобретений и 13035, Москва, Ж - 35, Рауш
СмотретьЗаявка
2877790, 04.02.1980
заявители
АЛЕКСАНДРОВ ЮРИЙ АРТЕМОВИЧ, ЗАКОРЮКИН ВЛАДИМИР МИХАЙЛОВИЧ, ОЛЕЙНИКОВ ВАСИЛИЙ ДМИТРИЕВИЧ, ПОДДУБНЫЙ ИГОРЬ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: G05B 11/06
Метки: следящая
Опубликовано: 30.11.1981
Код ссылки
<a href="https://patents.su/4-885970-sledyashhaya-sistema.html" target="_blank" rel="follow" title="База патентов СССР">Следящая система</a>
Система управления двигателем внутреннего сгорания с впрыском топлива во впускной коллектор и искровым зажиганием

Номер патента: 1746017
Опубликовано: 07.07.1992
Автор: Павловский
МПК: F02D 41/00
Метки: внутреннего, впрыском, впускной, двигателем, зажиганием, искровым, коллектор, сгорания, топлива
...2, топливного фильтра 3,гасителя 4 колебаний топлива, топливныхфорсунок 5, топливной магистрали 6, регулятора 7 давления. пусковой форсунки 8,байпасного канала 9 холостого хода и дроссельных заслонок 10, Электрическая частьсостоит из блока 11 управления, катушки 12зажигания, распределителя 13 высокого напряжения, свечей 14 зажигания, датчика 15положения дроссельной заслонки, датчика16 расхода воздуха, датчика 17 температурывоздуха, кислородного датчика 18, термодатчика 19 пусковой коррекции, датчика 20температуры охлаждающей жидкости, регулятора 21 дополнительного воздуха, корректора 22 холостого хода, индуктивногодатчика 23 начала отсчета, индуктивногодатчика 24 угловых импульсов, аккумуляторной батареи 25, замка 26 зажигания, реле...
Обратимая следящая система на двигателях постоянного тока

Номер патента: 167230
Опубликовано: 01.01.1965
МПК: G05B 11/01
Метки: двигателях, обратимая, постоянного, следящая
...система отличается от известных тем, что в ней исполнительные двигатели включены по схеме балансного моста, в одну диагональ которого включен выход усилителя канала слежения и воспроизведения, а в другую диагональ - выход усилителя канала компенсации моментов трения и инерции. Это позволяет повысить чувствительность системы,На чертеже приведена блок-схема обратимой следящей системы на двигателях постоянного тока.Система состоит из канала 1 слежения и воспроизведения усилий и канала 2 компенсации моментов трения и сил инерции, связь этих каналов образует балансный мост 3, составленный из двух двигателей 4 и 5 и двух балансных сопротивлений 6 и 7. В диагонали моста включены выход усили 1 еля мощности 8 канала 1 слежения и воспроизведения...
Термостат системы охлаждения двигателя внутреннего сгорания

Номер патента: 1744283
Опубликовано: 30.06.1992
МПК: F01P 7/16
Метки: внутреннего, двигателя, охлаждения, сгорания, системы, термостат
...фланцу 10 посредством осевой тяги 11 подвижный фланец 4,Полость а, образованная основным 2 и наружным 3 сильфонами, корпусом 1 и подвижным фланцем 4, заполнена текучей средой (например, воздухом или другим веществом), коэффициен теплопроводности которой меньше коэффициента теплопроводности материала стенок сильфонов.Полость Ь, образованная основным сильфоном 2, коопусом 1 и подвижным фланцем 4, а также полость с, образованная подвижным фланцем 4, средним подвижным фланцем 10, вспомогательным 5, внутренним сильфоном 9 и вспомогательным 5 клапаном б, заполнены легкокипящей ЖИДКОСТЬЮ.Для прямого и обратного перепуска легкокипящей жидкости из полости б в полость с, обеспечивающего при стабилизации теплового состояния рабочей жидкости в...
Оптический преобразователь угла поворота вала в электрический сигнал

Номер патента: 170852
Опубликовано: 01.01.1965
Метки: вала, оптический, поворота, сигнал, угла, электрический
...поворота вала 1, На обращенной к растрам стороне светопровода 7 нанесена модулирующая световой поток маска в виде двух колец (не показаны) с темными и прозрачными секторами. Период секторов равен периоду муаровых картин, а угловая величина темного и прозрачного секторов - половине периода. Прозрачные секторы одного кольца, расположенного под лимбами 3 и б, сдвинуты относительно прозрачных секторов другого кольца, расположенного под лимбами 2 и 4, на половину периода муаровых картин. В согласованном положении муаровых картин на фотоэлемент 8 падают световые потоки, создающие сигналы напряжения. Результирующая этих сигналов постоянна по величине. На фотоэлемент поступает также сигнал опорного напряжения, который генерируется в катушках...
Двухступенчатый редуктор-испаритель системы питания двигателя внутреннего сгорания

Номер патента: 1702875
Опубликовано: 30.12.1991
Авторы: Васильев, Долгов, Казанов, Кузнецов, Леоненков, Назаров
МПК: F02M 21/06
Метки: внутреннего, двигателя, двухступенчатый, питания, редуктор-испаритель, сгорания, системы
...для испарения сжиженного газа, мембрана клапана низкого давления установлена с образованием командной полости, последняя сообщена с выходной полостью, а в корпусе выполнен канал, сообщающий рабочую полость корректора с командной и выходной полостями, Кроме того, данный канал может быть выполнен цилиндрическим и его торец сопряжен с поверхностью командной полости по поверхности с криволинейной образующей, в частности по сферической поверхности, а канал, сообщающий систему пуска с выходной полостью, выполнен в виде сопла, ориентированного эквидистантно относительно торца канала, сообщающего рабочую полость корректора с командной и выходной полостями.На Фиг. 1 представлена конструктивнаясхема редуктора-испарителя, на фиг. 2 - фрагмент...
Предыдущий патент: Система удаления масла из картера двигателя внутреннего сгорания
Следующий патент: Релейный регулятор
Случайный патент: Устройство для удаления центрового остатка на обрабатываемой детали