Система дистанционного управления двигателем с реверс редукторной передачей
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
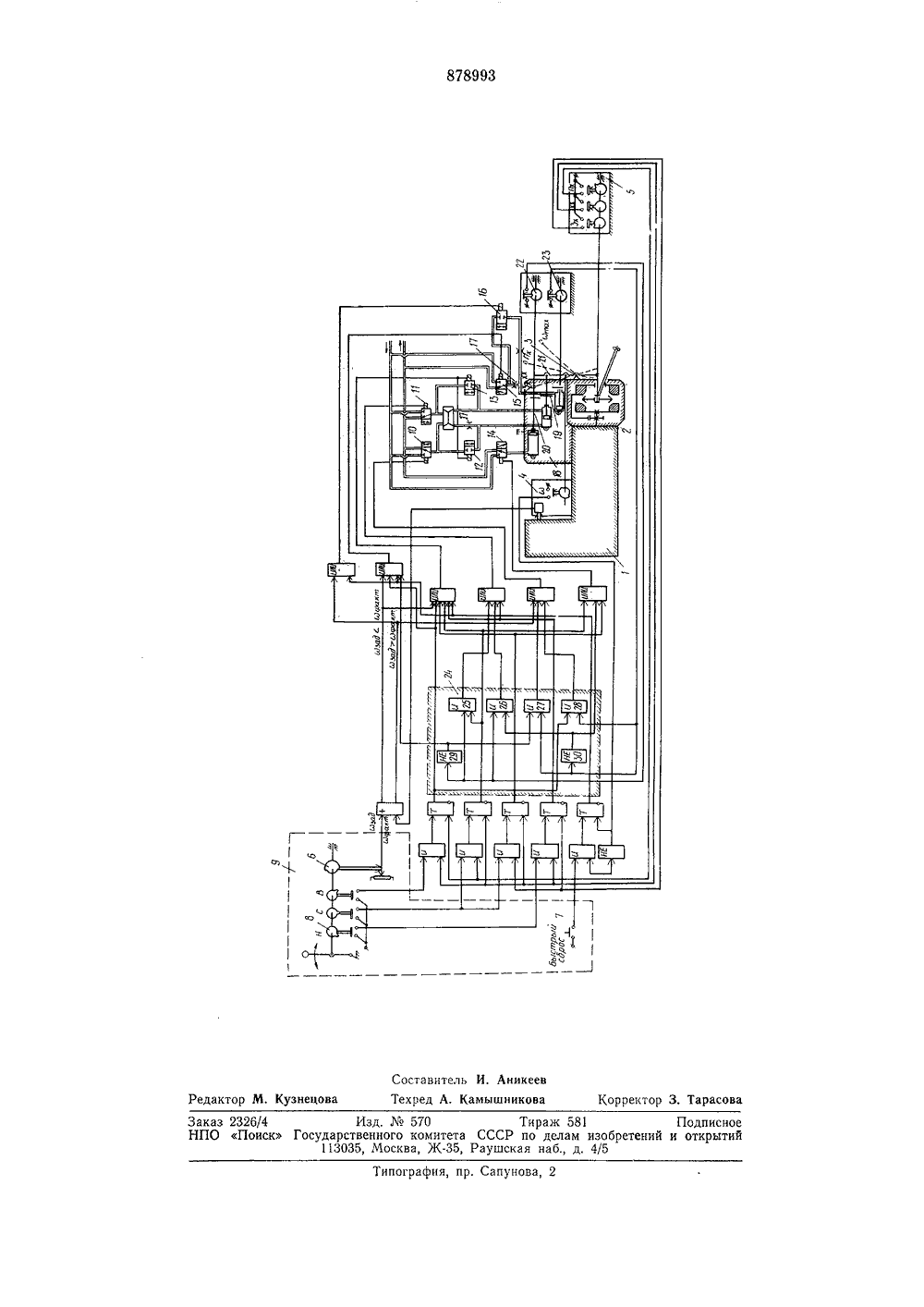
(088,8) по делам изобретений и открытий(54) СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕИИзобретение относится к области машиностроения, в частности к двигателестроению, и может быть использовано при автоматизации транспортных, преимущественно судовых, силовых установок, оборудованных реверс-редукторными передачами,По основному авт. св.740969 известна система дистанционного управления, например электр огидравлическая, содержащая местный пост с рычагом управления и дистанционный пост управления, снабженный командными органами управления частотой вращения двигателя и реверс-редукторной передачей и подключенный при помощи логической схемы, снабженной датчиками режима работы двигателя и положения реверс-редукторной передачи и электромагнитными клапанами, к блоку сервомеханизмов, кинематически связанному с местным постом управления и снабженному фиксатором и стопорами рычага управления, при этом стопоры рычага управления выполнены в виде подвижных упоров и подключены через электромагнитные клапаны к командным органам дистанционного поста управления, а фиксатор выполнен в виде траверсы, расположенной между подвижными упорами и связанный с выходным штоком блока сервомеханизмов. Подвижные упоры могут быть выполнены в ви.ревич, И. Г. Модестов и Б. Г. Сиротйн;,.4 де сервоцилиндров двойного действия, у каждого з которых одна нз полостей снабжена дренажным отверстием 1.Однако для известной системы характер на недостаточная надежность при возникновении отказов. Например, обрыв гидро- линии связи электромагнитных клапанов и сервоцилиндров подвижных упоров может привести к проскоку рычагом управления 10 промежуточных положений реверс-редукторной передачи. В результате действие системы будет не соответствовать поданной команде, что может вызвать выход из строя реверс-редукторной передачи.15 Целью изобретения является повышениеэксплуатационной надежности системы.Поставленная цель достигается тем, чтосистема дополнительно снабжена координатором перемещения рукоятки местного 20 поста, а подвижные упоры снабжены дополнительными датчиками фиксированных положений и последние подключены к входам координатора, выходы которого через элементы ИЛИ соединены с электромагнитны ми клапанами. Кроме того, координаторвыполнен в виде пар двухвходовых логических элементов И, число которых равно числу датчиков фиксированных положений подвижных упоров и инверторов, причем к з 0 одному входу каждого логического элеменЛта подключен один из командных органовдистанционного поста, а к другому черезинвертор - один из датчиков фиксированных положений подвижных упоров,На чертеже представлена структурнаясхема системы.Двигатель 1 с реверс-редукторной передачей 2 содержит местный пост 3 управления и снабжен датчиками режима работыдвигателя 4 и положения передачи 5, Дистанционное управление осуществляется органами 6 и 7 управления частотой вращения двигателя и реверс-редукторной передачей 8 дистанционного поста 9, подключенными при помощи пар из последовательно соединенных логического элемента И изапоминающего устройства, число которыхравно числу фиксированных режимов управления частотой вращения двигателя ичислу режимов переключения передачи ивходы, которых соединены с датчиками режима работы двигателя 4 и положения реверс-редукторной передачи 5 соответственно, а также элемента сравнения в каналебесступенчатого управления изменениемчастоты вращения двигателя, электромагнитных клапанов 10 - 16 и гидравлическихдросселей 17 к блоку сервомеханизмов 18.Ьлок сер вомеханизмов снабжен фиксатором положений 19, взаимодействующим состопором, выполненным в виде по крайнеймере двух подвижных упоров 20 и 21.Каждый подвижный упор снабжен покрайней мере одним датчиком фиксированного положения 22 и 23 соответственно.Датчики фиксированного положения 22и 23 связаны с входами координатора перемещения 24 рукоятки управления местногопоста 3, другие входы которого подключенык командным органам 8 дистанционного поста 9, а выходы - к электромагнитнымклапанам 10 и 11, 14 и 15.Координатор перемещения 24 выполненв виде инверторов НЕ 29 и 30 и пар логических элементов И 25 и 28, число которыхравно числу, подвижных упоров стопора иодни входы которых соединены с датчикомфиксированного положения соответствующего подвижного упора, а вторые входылогических элементов И 25 и 28 соединеныс командным органом 8 дистанционного поста 9, а элементов И 26 и 27 - с выходамиинверторов НЕ 30 и 29 соответственно, подключенных к датчикам фиксированных положений 23 и 22 соответственно,Система дистанционного управления двигателем с реверс-редукторной передачей работает следующим образом.За исходное положение рукоятки управления местного поста 3 примем ее нахождение в положении Холостой ход (ХХ).При установке командного органа 8 дистанционного поста 9 в положение Назад (Н)перемещение рукоятки местного поста 3 вположение Задний ход (ЗХ) происходит 5 о ю с) 30 35 40 45 50 55 60 65 4при помощи электромагнитных клапанов11 - 13 и перевода сервомеханизма с фиксатором 19 влево до упора поршня в дно сервоцилиндра.Снятие управляющего сигнала с электромагнитных клапанов 11 - 13 происходит после переключения реверс-редукторной передачи на ЗХ путем подачи сигнала от датчика ЗХ положения передачи 5 на входсброса соответствующего запоминающегоустройства.При установке командного органа 8 поста 9 в положение Стоп (С) перемещениерукоятки местного поста 3 в положение ХХпроисходит при помощи электромагнитныхклапанов 14, 12 и 13 и перевода подвижно.го упора 20, взаимодействующего с фиксатором 19, вправо до упора в дно сервоцилиндра подвижного упора.Снятие управляющего сигнала с электромагнитных клапанов 14, 12 и 13 происходит после переключения реверс-редукторной передачи на ХХ путем подачи сигналаот датчика ХХ положения передачи 5 навход сброса соответствующего запоминающего устройства,При установке командного органа 8 дистанционного поста 9 в положение Вперед (В) перемещение рукоятки местногопоста 3 в положение Передний ход (ПХ)происходит при помощи электромагнитныхклапанов 10, 12 и 13 и перевода сервомеханизма с фиксатором 19 вправо до упорафиксатора в подвижный упор 21, фиксациякоторого осуществляется при помощи электромагнитного клапана 15.Снятие управляющего сигнала с электромагнитных клапанов 10, 12, 13 и 15 происходит после переключения реверс-редукторной передачи на ПХ путем подачи сигналаот датчика ПХ положения передачи 5 навход сброса соответствующего запоминающего устройства.В случае отказа стопора, например обрыва гидролинии, соединяющей электромагнитный клапан 15 и подвижный упор 21,последний при перемещении сервомеханизма с фиксатором 19 вправо не сможет зафиксировать фиксатор в положении ПХ итот будет продолжать двигаться вправо,вытягивая за собой упор 21, При перемещении упора 21 вправо последний разомкнетконтакты датчика 23 фиксированного положения и снимет сигнал с входа инвертораНЕ 30. Сигнал с выхода инвертора НЕ 30через логический элемент И 26 поступит наэлектромагнитный клапан 11, обеспечиваявозврат сервомеханизма с фиксатором 19назад (влево) до упора фиксатора в подвижный упор 20, фиксация которого осуществляется при помощи электромагнитного клапана 14,Рукоятка местного поста 3 вернется висходное положение и ложного срабатывания системы - прохождения рукоятки через промежуточное положение местного поста без фиксации в этом положении - не произойдет, что предотвратит выход реверсредукторной передачи из строя.Работа системы при переводе рукоятки местного поста из положения ПХ в положение ХХ происходит аналогично, но в работе системы принимают участие датчик фиксированного положения 22 подвижного упора 20, инвертор НЕ 29 и логический элемент И 27 координатора перемещения 24.Бесступенчатое управление изменением частоты вращения двигателя 1 осуществляется при помощи элемента сравнения путем сравнения заданного скоростного режима от командного органа 6 и фактического режима от датчика режима работы двигателя 4 воздействием при помощи электромагнитных клапанов 10 и 16 (при необходимости увеличения частоты вращения) или 15, 12 и 13 (при необходимости уменьшения частоты вращения) и гидравлических дросселей 17 на сервомеханизм с фиксатором 19 или подвижный упор 21 соответственно,Экстренное уменьшение частоты вращения двигателя осуществляется командным органом 7 Быстрый сброс воздействием при помощи электромагнитных клапанов 15, 16, 12 и 13 и гидравлического дросселя 17 на подвижный упор 21.Предлагаемая система по сравнению с известной обеспечивает повышение эксплуатационной надежности реверс-редукторнойпередачи и всего транспортного средства вцелом,5 Формула изобретения1, Система дистанционного управлениядвигателем с реверс-редукторной передачей по авт. св. М 740969, отличающаяся 1 О тем, что, с целью повышения надежности,система дополнительно снабжена координатором перемещения рукоятки местного поста, а подвижные упоры снабжены дополнительными датчиками фиксированных по ложений и последние подключены к входамкоординатора, выходы которого через элементы ИЛИ соединены с электромагнитными клапанами.2, Система по п, 1, отличающаяся 20 тем, что координатор выполнен в виде пардвухвходовых логических элементов И, число которых равно числу датчиков фиксированных положений подвижных упоров и инверторов, причем к одному входу каждого .5 логического элемента подключен один изкомандных органов д станционного поста, а к другому через инвертор - один из датчиков фиксированных положений подвижных упоров.30 Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССРМз 740969, кл. Г 02 Р 2/00, 1978.878993 Корректор 3 Тарасова ктор М. Кузнецо ипография, пр. Сапунова аказ 2326/4НПО Поиск Составитель И. Аникеев ехред А. Камыщникова Изд.570 Тираж 581 Подписно арственного комитета СССР по делам изобретений и открыти 13035, Москва, Ж.35, Раушская наб., д. 4/5
СмотретьЗаявка
2744470, 26.03.1979
ПРЕДПРИЯТИЕ ПЯ Р-6397
БУХАНОВ ФЕДОР ТИМОФЕЕВИЧ, ГУРЕВИЧ ВЛАДИМИР ПАВЛОВИЧ, МОДЕСТОВ ИГОРЬ ГЕННАДИЕВИЧ, СИРОТИН БОРИС ГЕОРГИЕВИЧ
МПК / Метки
МПК: F02D 27/00
Метки: двигателем, дистанционного, передачей, реверс, редукторной
Опубликовано: 07.11.1981
Код ссылки
<a href="https://patents.su/4-878993-sistema-distancionnogo-upravleniya-dvigatelem-s-revers-reduktornojj-peredachejj.html" target="_blank" rel="follow" title="База патентов СССР">Система дистанционного управления двигателем с реверс редукторной передачей</a>
Система дистанционного управления двигателем с реверс редукторной передачей

Номер патента: 699218
Опубликовано: 25.11.1979
Авторы: Букин, Вдовина, Гуревич, Иофа, Мушанов, Сиротин, Шперлинг
МПК: F02D 37/00
Метки: двигателем, дистанционного, передачей, реверс, редукторной
...с логическим элементом 34. Логический элемент И Зб связан при помощидополнительного авпоминающего устройства 40 с логическим элементом 35. Выход аапомина.ощего устройства 37 подключен при помощи логического элемента ИЛИ 27 к преобрааователю 29 Н. Выход аапоминающего устройства 38 подключен при помощи алемента ИЛИ 27 и 28 к преобразователям 29 и 30, а выход элемента И 36 - к обмотке М ("меньше") преобрааователя 33.Входы сброса, которыми снабжены дополнительные запоминающие устройства 26, 32, 39 и 40, подключены через НЗ контакты каждого командного органа к источнику питания при 1 помощи логического элемента И 41. Входы сброса аапоминающих устройств 25, 31 и 37, 38 подключенык концевым выключателям 11, 12, 13. Кконцевым...
Система дистанционного управления двигателем с реверс редукторной передачей

Номер патента: 883539
Опубликовано: 23.11.1981
Авторы: Вдовина, Сиротин, Фролков, Шперлинг
МПК: F02D 37/00
Метки: двигателем, дистанционного, передачей, реверс, редукторной
...пуска 53 - ко входам установки регулятора.Бесступенчатое фикСир г щее устройство 54 выполнено в виде гидрозамка, содержащего основание, внутри которого размещен подпружиненный с двух сторон поршень 55, снабженный выступами, и подпружиненные клапаны 56 и 57, расположенные с обоих сторон поршня, причем гидрозамок соединен с преобразователем пуска 53 и с механиз 55 мом 9 установки рег ято,аВходы гидрозамка расположены по обе стороны поршня 55, в выходы - со стороны пружин клапанов 56 и 57. В канале от гидрозамка 54 до механизмаустановки регулятора встроено дросселирующее устройство 58.Дополнительный командный орган 52подключен параллельно с преобразователем пуска 53 через обмотку Б 1 припомощи элемента ИЛИ 59 к командныморганам...
Система дистанционного управления двигателем с реверс редукторной передачей
Номер патента: 740969
Опубликовано: 15.06.1980
МПК: F02D 27/00
Метки: двигателем, дистанционного, передачей, реверс, редукторной
...клапанов 11,12 и 13 и привода сервомеханизма сфиксатором 19 влево (см. фиг. 1) до упора поршня в дно сервоцилиндра. 0Снятие управляющего сигнала с электромагнитных клапанов 11, 12 и 13 происходит после переключения реверс-редукторной передачи на ЗХ путем подачи сигнала от датчика 5 ЗХ положения передачи на вход сброса соответствующего запоминающего устройства.При установке органа 8 дистанционногопоста 9 в положение Стоп (с) перемещение рукоятки местного поста в положение ХХ происходит с помощью электромагнитных клапанов 14, 12 и 13 и пере вода подвижного упора 20, взаимодействующего с фиксатором 19, вправо (см. фиг. 1) до упора в дно сервоцилиндра упора.Снятие управляющего сигнала с электромагнитных клапанов 14, 12 и 13...
Система дистанционного управления двигателем с реверс редукторной передачей

Номер патента: 960457
Опубликовано: 23.09.1982
Авторы: Наумов, Сиротин, Шперлинг
МПК: F02D 37/00
Метки: двигателем, дистанционного, передачей, реверс, редукторной
...дросселирующее устройство 58.Гидрозамок выполняет функции бесступенчатого фиксирующего устройства.5Дополнительный командный орган 52 подключен параллельно с преобразователем пуска 53 (через обмотку. "Больше") при помощи элемента ИЛИ 59 к командным органам 20 и 21 управления.Обмотка "Меньше" гидрозамка снабжена подпружиненным органом 60 ручного управления и взаимодействующим с ним рычагом 61. 15Система работает следующим обра:зом.При подготовке двигателя к пуску командный орган 52 переводят в положение "Пуск". При этом передача 20 двигателя 1 должна находиться в положении "Холостой ход" (замкнут выключатель 42). Срабатывает преобразователь 53 и подает рабочее тело в полость (правую) механизма 9. Толкатель с .поршнем 18 через гайку 19...
Регулятор скорости непрямого действия для двигателя внутреннего сгорания с реверс-редукторной передачей

Номер патента: 577305
Опубликовано: 25.10.1977
Авторы: Берденников, Гуревич, Лерман, Почекаев, Шперлинг
МПК: F02D 1/12
Метки: внутреннего, двигателя, действия, непрямого, передачей, реверс-редукторной, регулятор, сгорания, скорости
...через пружины настройки 6 и 7 обеспечивается перемещение золотника 11 влево. Отсечной поясок золотника 11 35 открывает при этом окна 19 в хвостовике сервомотора 2, сообщая. полость 18 с рабочей полостью 20. При запуске двигателя воздух от системы запуска поступает через редукционный 29 и 40 обратный 31 клапаны в пневмогидравлический аккумулятор 26. ВЬздух иэ аккумулятора 26 или непосредственно по трубопроводам 27 и 28 попадает в кольцевую проточку 16, а оттуда в ра бочую полость 20 и перемещает поршень сервомотора 2, или вытесняет в эту же полость оставшееся в аккумуляторе 26 масло. При движении влево поршень сервомотора 2 через силовой рычаг 13 60 перемещает орган дозирования 15 в сторону увеличения подачи.От воздействия центробежных...
Предыдущий патент: Система запуска газотурбинного двигателя
Следующий патент: Поршень для двигателя внутреннего сгорания
Случайный патент: Способ непрерывного сбраживания паточных заторов