Система дистанционного управления двигателем с реверс редукторной передачей
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
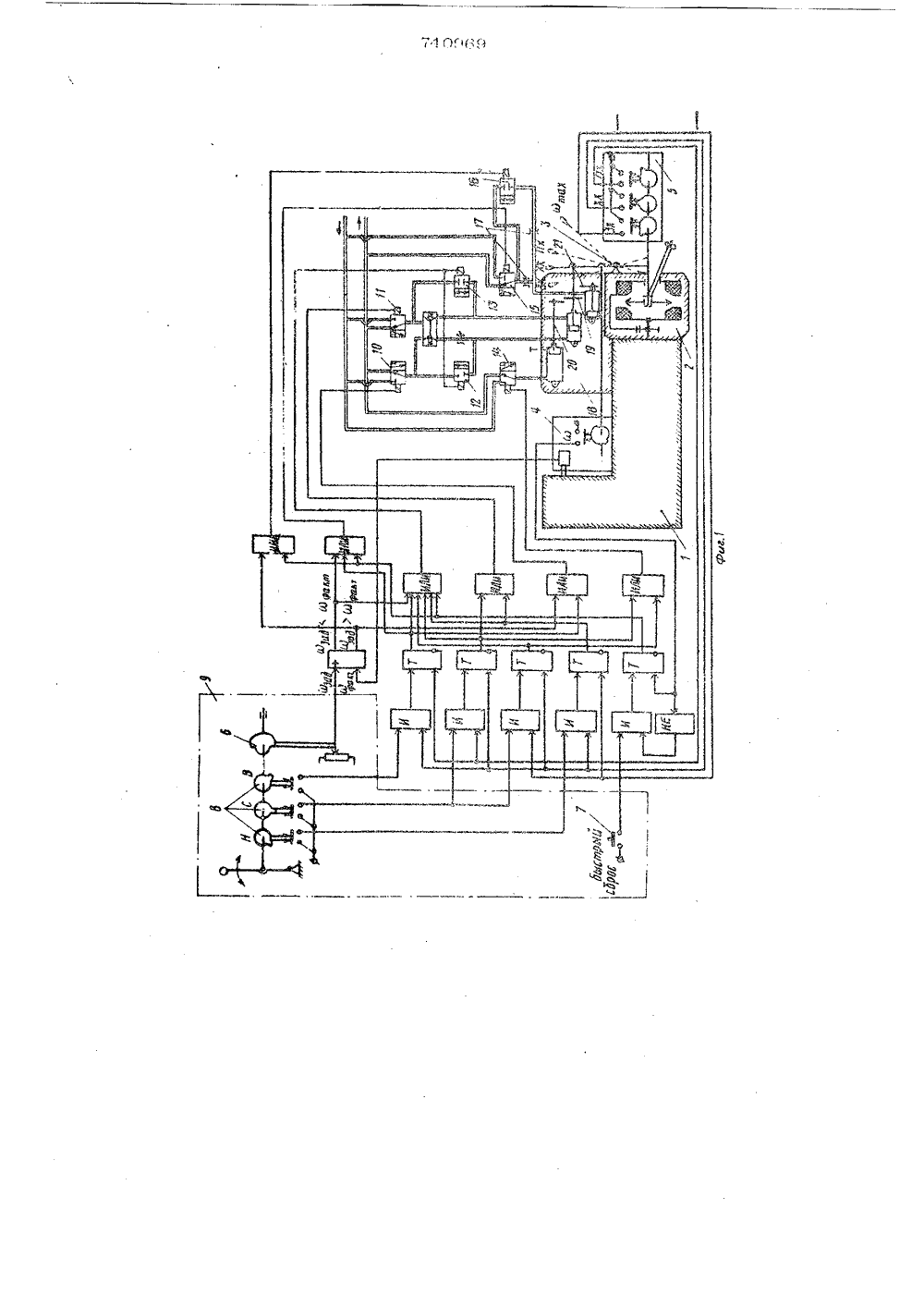
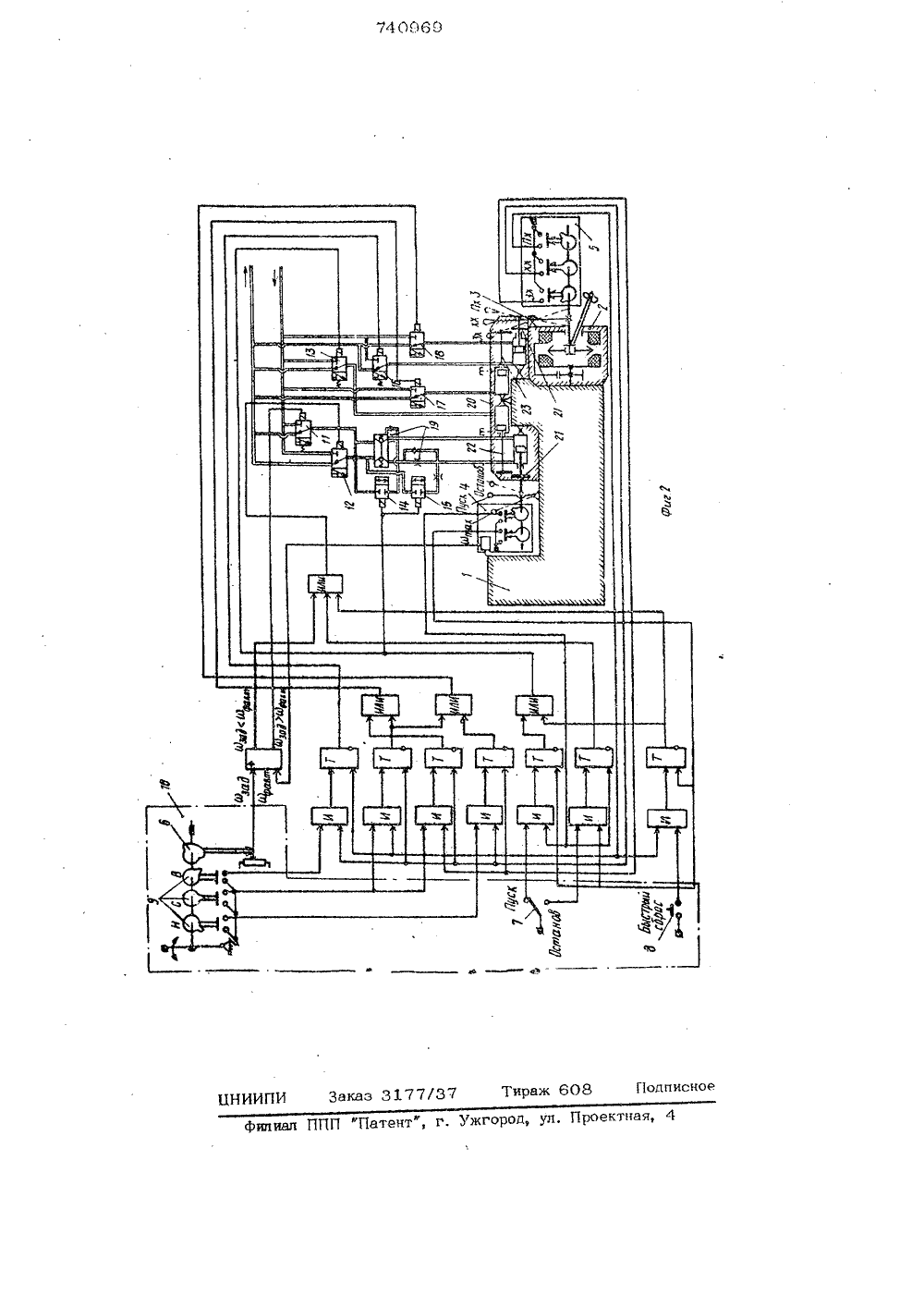
(и) 4 О 96 э Советски ЛИС ЗОБРЕ Социалистиче Респубпии О,Гоюуднрютеенный нюмнтетСССР ((22) Заявлен 1) М. 2 Э 27/00 с прнсоеднн 2:)ри(тн т -делам нзюбретеннн н юткрытнй Опубл вано 15,06 3) УДК 621 436 ,038 (088,8) та опубликовании( ) С ИСТ )т М А ДИС ТА НПИОН НОГО У ДВ)(ГАТЕЛЕМ С РЕВЕРС-РЕДУ П ЕРЕДАЧ ЕИА ВЛЕНИОРНОЙ ежду подв выходным то е упоры мог оципиндровго из которых т ыть двойноодна тверсти енажнь Изобретение относится к обпасти машиностроения, в частности двигателестроения, ц касается систем дистанционного управления двигателями, оборудованными реверс-редукторцой передачей и установленными ца транспортных средствах, нап 5 ример, на судах.Известны системы дистанционного автоматического управления двигатепем, содержаптие местцыи пост и дистанционный10 пост управления, снабженный командным оргоном управления частотой вращения двигателя и реверсировация (11.Недостатком известных систем является сложность конструкции фиксатора дискрет 15 ных положений местного поста управления,1 епью настоящего изобретения является повьпвецие надежности системыГоставленная цель достигается тем, что стопоры рычага управления выполнены в виде двух подвижных упоров и подключены через электромагнитные клапаны и командным органам дистанционного поста управления, в фиксатор выпопцец в виде траверсы, расположенной упорами и связанной с блока сервомеханизмовПри этом подвижны выполнены в виде серв го действии, у каждо из полостей снабжена емуНа фиг, 1 представпена структурная схема системы с однорукояточным местным постом управления; нв фиг. 2 - схема системы с двухрукояточным местным постом управления.,Пвигатепь 1 с реверс-редукторной передачей 2 содержит местный пост 3 управпения и снабжен датчиком 4 режима работы двигатепя и датчиком 5 попожения передачи. Дистанционное управпение осуществляется органами управления частотой вращения двигателя 6, 7 (на фиг. 1 ипи 6, 7, 8 (на фиг. 2) и органами 8управления реверс-редукторной передачей(на фиг. 2), подключенными при помощипар иэ посл,едовательно соединенных логического элемента И и запоминающегоустройства, число которых равно числуфиксированных режимов управления частотой вращения двигателя и числу режимовпереключения передачи, и входы которыхсоединены с датчиком 4 режима работыдвигатели и датчиком 5 положения реверс-редукторной передачи соответственно, 10а также элемента сравнения в канале бесступенчатого управления изменением частоты вращения двигателя, электромагнитных клапанов 10, 11, 12, 13, 14, 15,16 (на фиг. 1) или 11, 12, 13, 14, 15, 1516, 17, 18 (на фиг. 2) и гидравлическихдросселей 17 (на фиг. 1) или 19 (нафиг. 2) к блоку 18 сервомеханизмов (нафиг. 1) или 20 (на фиг. 2). Блок сервомеханизмов снабжен фиксатором 19 положений (на фиг. 1) или 21 (на фиг. 2),взаимодействующим со стопором, выполненным в виде по крайней мере двух подвижных упоров 20, 21 (на фиг. 1) или22, 23 (на фиг, 2). 25Работу системы дистанционного управления рассмотрим по структурной схеме,приведенной, например, на фиг, 1.За исходное положение рукоятки местного поста примем ее нахождение в лоложении Холостой ход (ХХ).При установке органа 8 управления реверс-редукторной передачей дистанционного поста 9 в положение "Назад" (Н) перемещение рукоятки местного поста в 35положение "Задний ход (ЗХ) происходит с помощью электромагнитных клапанов 11,12 и 13 и привода сервомеханизма сфиксатором 19 влево (см. фиг. 1) до упора поршня в дно сервоцилиндра. 0Снятие управляющего сигнала с электромагнитных клапанов 11, 12 и 13 происходит после переключения реверс-редукторной передачи на ЗХ путем подачи сигнала от датчика 5 ЗХ положения передачи на вход сброса соответствующего запоминающего устройства.При установке органа 8 дистанционногопоста 9 в положение Стоп (с) перемещение рукоятки местного поста в положение ХХ происходит с помощью электромагнитных клапанов 14, 12 и 13 и пере вода подвижного упора 20, взаимодействующего с фиксатором 19, вправо (см. фиг. 1) до упора в дно сервоцилиндра упора.Снятие управляющего сигнала с электромагнитных клапанов 14, 12 и 13 про 9фисходит после переключения реверс-редук торной передачи на ХХ путем подачи сигнала от датчика 5 ХХ положения передачи на вход сброса соответствующего запоминающего устройства.При установке органа 8 дистанционного поста 9 в положение Вперед" (В) перемещение рукоятки местного поста в положение "Передний ход" (ПХ) происходит с помощью электромагнитных клапанов 10, 12 и 13 и перевода сервомеханиэма с фиксатором 19 вправо (см. фиг. 1) до упора фиксатора 19 в подвижный упор 21 фиксация которого осуществляется с помощью электромагнитного клапана 15,Снятие управляющего сигнала с электромагнитных клапанов 10, 12, 13 и 15 происходит после переключения реверсредукторной передачи на ПХ путем подачи сигнала от датчика 5 ПХ положения передачи на, вход сброса соответствующего запоминающего устройства.Бесступенчатое управление изменением частоты вращения двигателя 1 осуществляется с помощью элемента сравнения путем сравнения заданного режима от органа 6 управления частотой вращения и фактического режима от датчика 4 режима работы двигателя воздействием с помощью электромагнитных клапанов 10 и 16 (при необходимости увеличения частоты вращения) или 15, 12 и 13 (при необходимости уменьшения частоты вращения) и гидравлических дросселей 17 на сервомеханизм с фиксатором 19 или подвижный упор 21 соответственно до упора в дно сервоцилиндра.Экстренное уменьшение частоты вращения двигателя "Быстрый сброс" осуществляется воздействием органа 7 с помощью электромагнитных клапанов 15 16, 12 и 13 и гидравлического дросселя 17 на подввкный упор 21. Работа системы, структурная схема которой приведена на фиг. 2, происходит аналогично, но с раздельным воздействием на отдельные органы управления местного поста., Применение однотипных сервоцилиндров для сервомеханизма привода рукояток местного поста и для подвижных упоров упрощает конструкцию, повышает надежность системы и исключает возможность проскока фиксированных эа счет жесткой установки подввкных упоров в заданные положения и за счет упора поршней в дно сервоцилиндров.5 740969Формул а .изобретения 1. Система дистанционного управлениУ двигателем с реверс-редукторной передачей, например, эпектрогидравличеслаа,со держащая местный пост с рычагом управ пения и дистанционный пост управления, снабженный командными органами управ- ленво частотой вращения двигателя и ре верс-редукторной передачей и подключен ный при .помощи погической схемы, снаб,женной датчиками режима работы двигателя и положения реверс-редукторной передачи и .электромагнитными клапанами к бпоку сервомеханизмов, кинематически И связанному с местным постом управления и снабженному фиксатором и стопорами рычага управления, о т л и ч а ю щ а я 6с я тем, что, с целью повышения падежности, стопоры рычага управления выполненыв виде подвижных упоров и подключены через эпектромагнитные клапаны ккомандным органам дистанционного постауправпения, а фиксатор выполнен в видетраверсы, расположенной между подвижными упорами и связанной с выходным щтоком блока сервомеханизмов.2. Система по п. 1, о т и и ч а ющ а я с я тем, что подвижные упорывыполнены в виде сервоцилиндров двойногадействия, у каждого из которых одна изполсстей снабжена дренажным отверстием,Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССР
СмотретьЗаявка
2572767, 12.01.1978
ПРЕДПРИЯТИЕ ПЯ Р-6397
ГУРЕВИЧ ВЛАДИМИР ПАВЛОВИЧ, СИРОТИН БОРИС ГЕОРГИЕВИЧ
МПК / Метки
МПК: F02D 27/00
Метки: двигателем, дистанционного, передачей, реверс, редукторной
Опубликовано: 15.06.1980
Код ссылки
<a href="https://patents.su/5-740969-sistema-distancionnogo-upravleniya-dvigatelem-s-revers-reduktornojj-peredachejj.html" target="_blank" rel="follow" title="База патентов СССР">Система дистанционного управления двигателем с реверс редукторной передачей</a>
Клапан с электромагнитным приводом

Номер патента: 1753154
Опубликовано: 07.08.1992
Автор: Созиев
МПК: F16K 31/02
Метки: клапан, приводом, электромагнитным
...Таким образом повышается чувствительность клапана,На фиг, изображен клапан с электромагнитным приводом в положении "Закрыто". ширение области использования клапана 1753154 . 4Клапан работает следующим образом,При подаче напряжения на электромагнитный привод 13, управляющий запорныморганом 12, под действием магнитодвижу 5 щей силы притягивается к полюсу 14, открывая разгрузочное отверстие 11. дляпоступления рабочей среды из надмембранной полости в выходной патрубок корпуса 1.Если разница давлений во входном и10 выходном патрубках корпуса 1 близка илиравна нулю, то перепад давления на основном запорном органе 9 не возникает илинедостаточен для поднятия основного запорного органа 9 над седлом 2 корпуса 1.15 В этом случае центр мембраны...
Механизм дистанционного электрического переключения ступенчатой коробки передач

Номер патента: 249952
Опубликовано: 01.01.1969
МПК: F16H 59/02
Метки: дистанционного, коробки, механизм, передач, переключения, ступенчатой, электрического
...подается ток в обмотку 21 муфты 2, что обеспечивает соединение вала электродвигателя с ползуном включения данных передач, Поэтому при включении электродвигателя в зависимости от направления его вращения происходит перемещение ползуна 15 влево или вправо, что обеспечивает включение 1-й или 2-й передачи. При перемещении ползуна 15 в крайние положения, соответствующие полному включению 1-й или 2-й передачи, срабатывает переключатель 22, что приводит к выключению и остановке электродвигателя. Муфта 2 продолжает оставаться включенной.Редуктор 23 электродвигателя выполнен с самотормозящейся передачей, поэтому при включенной муфте 2 возвратная пружина 24 не может переместить ползун в среднее положение, т, е. передача остается...
Устройство дли дистанционного управления ступенчатой многоходовой коробкой передач

Номер патента: 220062
Опубликовано: 01.01.1968
Автор: Старцев
МПК: F16H 59/02
Метки: дистанционного, дли, коробкой, многоходовой, передач, ступенчатой
...этого звена. Рычаг 1 ручного управления установлен на шарнире 9, несомом ведущим звеном 7 кинематической цепи б, Осьв - в шарнира 9 скрещивается с осью а - аьращения звена 7, расположена в плоскости, Бперпендикулярной оси а - а вращения звена 7.На изображенной схеме эта плоскость совпадает с плоскостью, в которой расположенаось б - б вращения звена 8. Рычаг 1 снабженвыступом 10 с шаровой головкой 11, расположенным вдоль стержня рычага 1 по другуюсторону от шарнира 9, Ведущее звено 8 имеетвилку 12, взаимодействующую с шаровой головкой 11 выступа 10 рычага 1, В кинематическпе цепи э и б, связывающие рычаг 1 ручного управления с рычагами б и б, могут входить рычаги 18 и 14, тяги 15 и 1 б (число ирасположение их может быть различным...
Устройство для дистанционного переключения ступеней в коробке передач транспортногосредства

Номер патента: 335127
Опубликовано: 01.01.1972
Автор: Рум
МПК: B60K 20/14
Метки: дистанционного, коробке, передач, переключения, ступеней, транспортногосредства
...рабочей средой под давлецием. В каждом исполнительном сервоццлццдре установлен поршень 7, упирающийся в торец соответствующего штока. В штоках имеются шайбы 8, прижимаемые к стенкам корпуса пружицой 9. В корпусе цад штоками размещен под прямым углом относительно цих олокировочцый стержень 10. Стержень выполнен с впадинами а, а штоки - с выемками б. Число впадин равно числу блокируемых штоков, Стержень и штоки связаны между собой прц помощи шариков 11. Олин конец стержня расположен в полости дополцительцого сервоцилиндра 12 и соединен с его диафрагмой И. На другом конце стержня закреплена рукоятка 14, выведенная из корпуса, Между стенкойкорпуса и буртиком стержня установлена возвратная пружина 15.Устройство работает следующим образом.Для...
Система для пуска двигателя транспортного средства с помощью подталкивания или буксирования транспортного средства

Номер патента: 1729286
Опубликовано: 23.04.1992
Авторы: Дьердь, Иштван, Ласло, Шандор
МПК: B60K 41/00
Метки: буксирования, двигателя, подталкивания, помощью, пуска, средства, транспортного
...12 с помощью одного усилителя мощности у каждой цепи, которые на схеме не показаны.Система для пуска двигателя транспортного средства работает следующим образом.Если водитель транспортного средства вынужден пускать транспортное средство с помощью подталкивателя, то он нажатием электрического ручного выключателя 16 передает сигнал на вход 36 блока 15 управления. При этом датчик 17 угловой скорости двигателя 1 еще не вырабатывает никакого сигнала, однако после логической схемы НЕ 22 появляется сигнал.Если скорость подталкиваемого транспортного средства достигает необходимой величины, вентильная схема НЕ - И 25 с тремя входами на основании сигнала датчика 18 угловой скорости, сигнала на выходе логической схемы Н Е 22 и сигнала...
Предыдущий патент: Регулируемый сопловой аппарат с турбомашины
Следующий патент: Карбюратор для двигателя внутреннего сгорания
Случайный патент: Электронно-гидравлический дозатор