Манипулятор с программным управлением
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
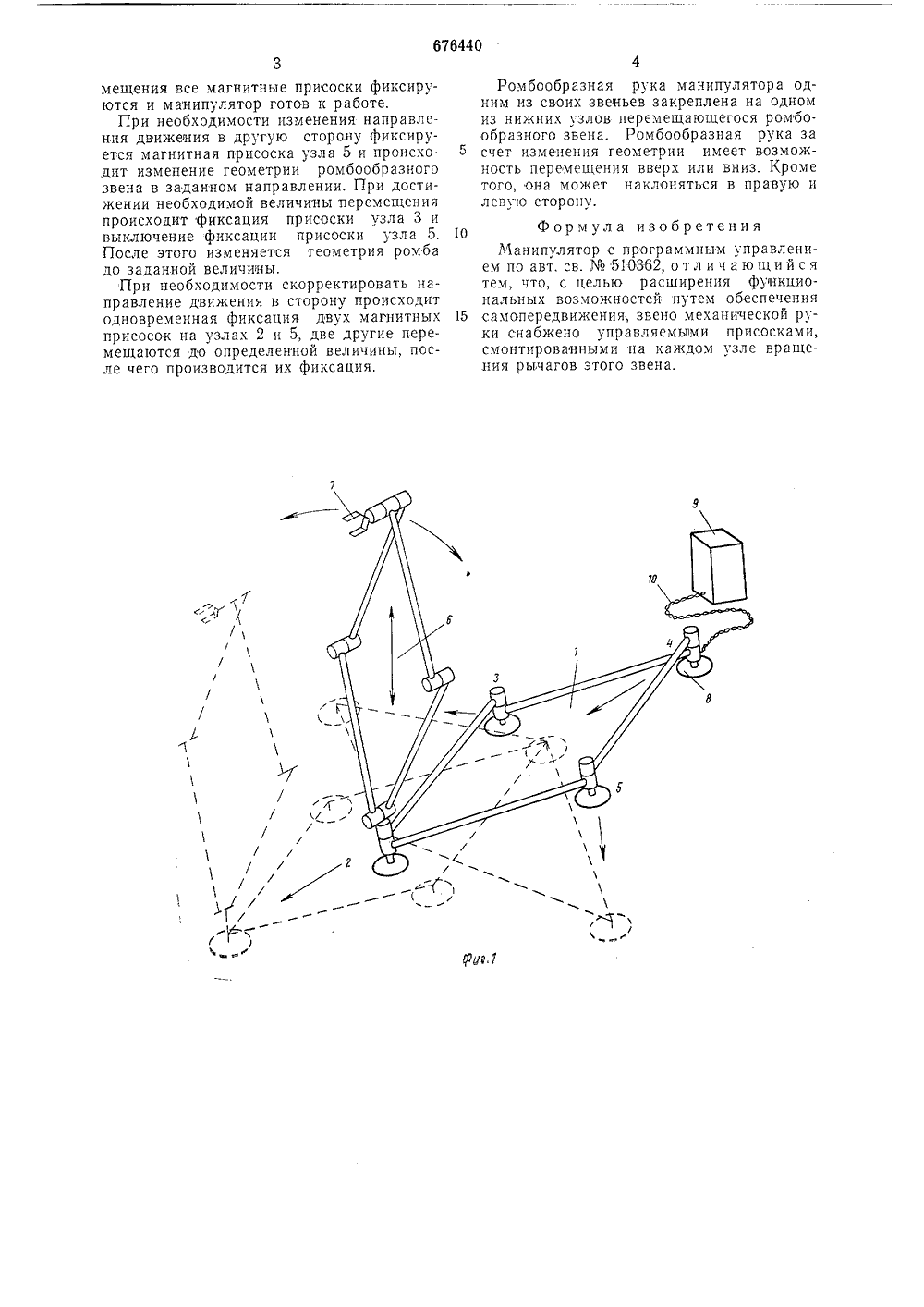
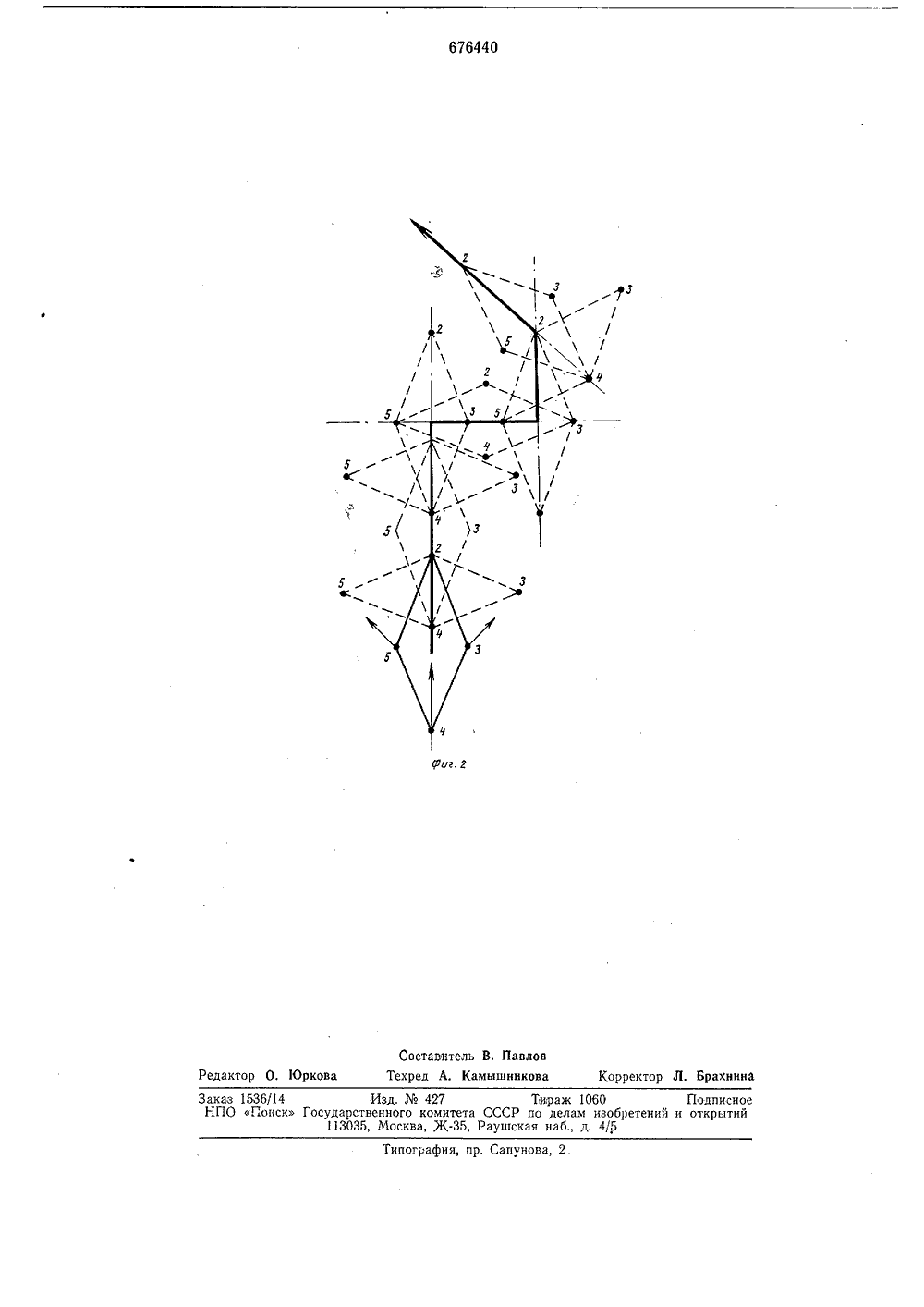
(и)676440 ОПИСАН И Е ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(51) М, К 25.У инением заявки ударственный комитет СССР(45) Дата опубликования описания 30,07.79. В. Керин и М. А. Шашкин Заявитель ОР 54) МАНИ ГРАММНЫМ УП ЕНИЕМ Изобретение относится к области машиностроения, а именно к манипуляторам ипромышленным роботам, предназначеннымдля автоматизации работ, в том числе вопасных и труднодоступных зонах, 5По авт. св,510362 известен манипулятор с программным управлениемсодержащий многозвенную руку с захватом, поворотно связанную с основанием, несущимОлок управления, каждое звено механической руки представляет собой четыре рычага, соединенных в виде ромба с помощьюактивных узлов вращения,Однако такой манипулятор имеет ограниченные функциональные возможности в 1связи с тем, что блок управления вместе срукой стационарно закреплен на основании,например столе, стене и т. д,Целью изобретения является расширениефункциональных возможностей путем обеспечения самопередвижения.Для этого в предлатаемом манипуляторезвено механической руки снабжено управляемыми, например электромагнитными,присосками, смонтированными на каждомузле вращения рычагов этого звена.На фиг. 1 изображен предлагаемый манипулятор; на фиг. 2 - схема работы звень 5 ержит ромбообразное зо анипуля(72) Авторы изобретения А. Н. Елисеев,звено 1, служащее для передвижения манипулятора, и четыре активных узла 2 - 5 вращения, вертикальное звено 6 и захват 7,На каждом узле ромбообразного звена 1, лежащего в плоскости передвижения и непосредственно связанного с блоком управления, установлены, например, электромагнитные присоски 8. Блок программного управления 9 соединен с манипулятором при помощи гибкого кабеля 10. На ромоообразном звене 6 может быть установлено от одного до трех захватов 7,Манипулятор работает следующим образом.Электрический сигнал, попадая с блока управления 9 по гибкому кабелю 10 на активные узлы 2 - 5, отключает электромагнитные присоски 8 на активных узлах 3 - 5 вращения, а на активном узле 2 вращения магнитная присоска фиксируется. Электрические двигатели отрабатывают заданную величину перемещения, изменяя тем самым геометрию ромба. После изменения теометрии перемещенная электромагнитная присоска 8 узла 4 фиксируется, а присоска узла 2 отключается и происходит дальнейшее изменение геометрии звена 1 с передвижением узла 2 в направлении стрелки, При достижении заданного перемещения все магнитные присоски фиксируются и манипулятор готов к работе,При необходимости изменения направления движения в другую сторону. фиксируется магнитная присоска узла 5 и происходит изменение геометрии ромбообразного звена в заданном направлении. При достижении необходимой величины перемещения происходит фиксация присоски узла 3 и выключение фиксации присоски узла 5. После этого изменяется геометрия ромба до заданной величины.При необходимости скорректировать направление движения в сторону происходит одновременная фиксация двух магнитных присосок на узлах 2 и 5, две другие перемещаются до определенной величины, после чего производится их фиксация,Ромбообразная рука манипулятора одним из своих звеньев закреплена на одном из нижних узлов перемещающегося ромбообразного звена. Ромбообразная рука за 5 счет изменения геометрии имеет возможность перемещения вверх или вниз. Кроме того, она может наклоняться в правую и левую сторону,10 Формула изобретенияМанипулятор с программным управлением по авт. св.51 ОЗб 2, отл и чающий ся тем, что, с целью расширения функциональных возможностей путем обеспечения 15 самопередвижения, звено механической руки снабжено управляемыми присосками, смонтированными на каждом узле вращения рычагов этого звена.676440 Составитель В, ПавлоТехред А. Камышнико Редакто Корректор Л. Брахнин ков Тираж 1060 ПодписноеР по делам изобретений и открытийская наб., д. 4/5 ография, пр. Сапунова, 2. За,каз 1536/14 Изд.427 НПО Поиск Государственного комитета СС 113035, Москва, Ж.35, Рау
СмотретьЗаявка
2562944, 02.01.1978
ПРЕДПРИЯТИЕ ПЯ В-2190
ЕЛИСЕЕВ АНАТОЛИЙ НИКОЛАЕВИЧ, ЖАРКОВ АНАТОЛИЙ АЛЕКСАНДРОВИЧ, РАПОПОРТ ГЕОРГИЙ НАУМОВИЧ, КАСАЕВ КАЗБЕК СОЛОМОНОВИЧ, КЕРИН ИГОРЬ ВЯЧЕСЛАВОВИЧ, ШАШКИН МИХАИЛ АЛЕКСЕЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор, программным, управлением
Опубликовано: 30.07.1979
Код ссылки
<a href="https://patents.su/3-676440-manipulyator-s-programmnym-upravleniem.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор с программным управлением</a>
Устройство для грубого и точного перемещений управляемого звена

Номер патента: 1198376
Опубликовано: 15.12.1985
Автор: Курак
Метки: грубого, звена, перемещений, точного, управляемого
...связанную с управляемым звеном 4, червяк 5, сопряженный с червячным колесом 2 и связанный с штурвалом б точного ,перемещения. Рукоятка 3 грубого перемещения установлена с возможностью осевого перемещения, пер. вым концом,7 связана с червячным колесом 2 соосной управляемой муфтой 8, управляемая полумуфта 9 которой, связана с рукояткой 3 и снабжена двумя соосными толкателями 10 и 11, один (10) из которых связан с корпусом 1 через пружину 12 поджатия муфты 8, а другой (11) - с подвижным элементом 13 .соосной . винтовой пары 14, установленной в корпусе 1 и снабженной штурвалом 15 размыкания муфты 8, и сопряжен с вторым концом 16 рукоятки 3 грубого перемещения, Поверхность штурвала 15 выполнена в виде сопрягаю- . щихся конической 17...
Устройство для грубого и точного перемещений управляемого звена

Номер патента: 1241215
Опубликовано: 30.06.1986
Автор: Курак
МПК: G05G 9/04
Метки: грубого, звена, перемещений, точного, управляемого
...поворотомПВ и фиксацией ее относительно корпуса 1 другим винтом, 1 э.п, ф-лы, 4 ил. тановленной на резьбе в корпус э 1 свозможностью фиксации, причем червячное колесо 6 установлено междуконцевым буртом 16 общей оси 15 и корпусом 1, а полумуфта 5 снабжена размещенными по периферии зубьями 17 длясопряжения с зубьями, червячного колеса 6.Червячное колесо 6 выполнено в .виде прямозубой шестерни, червяк 8 -в виде цилиндрического винта, осьрезьбы которого наклонена к плоскости вращения червячного колеса под углом, равным углу подъема его резьбы,а пружина 18 с толкателем 19 рукоятки 2 грубого перемещения размещена вее осевом углублении 20, Фиксациянаправляющей 12 обеспечивается винтом21, а по,воротнойвтулки 10-винтом 22.Устройство...
Способ перемещения подвижного звена и устройство для его осуществления

Номер патента: 1815206
Опубликовано: 15.05.1993
Авторы: Бойков, Быстров, Смирнов, Чежин
МПК: B25J 7/00
Метки: звена, перемещения, подвижного
...электрострикционного элемента Лот управляющего напряжения 0 у показана на фиг. 2 под номером 7. Здесь же под номером 8 показана для сравнения типичная характеристика пьезоэлектрического элемента,Устройство для перемещения подвижного звена работает следующим образом. На оба слоя электромеханического элемента 1 подают одинаковые по величине (в случае равенства толщины слоев) опорные напряжения 0 О от источника 6 через усилители 3 и 4, Максимальный диапазон перемещений обеспечивается при выборе 0 о равным половине от максимальной величины Оу. При этом оба слоя деформируются по радиусу на одинаковую величину и изгиба электромеханического элемента 1 не происходит. Управляющее напряжение от источ ника 5 на одном из слоев суммируется с...
Трактор для подъема и перемещения рельсовых звеньев

Номер патента: 21201
Опубликовано: 31.07.1931
Автор: Белоцерковец
МПК: B66C 23/44, E01B 29/02
Метки: звеньев, перемещения, подъема, рельсовых, трактор
...сдвигу. во время работы служат собаЧки 10 маховиков 3- (фиг, 5).Приведение в действие лебедок 7 осуществляется общеизвестным способом от имеющегося мотора (фиг. 3). Рельсовые звенья, поднимаемые при .помощи лебедок 7, укладываются внутри П-образного рамного корпуса 1, 3 на .ряд этажно-расположенных консольных поперечин 17 (фиг. 1, 2, 3), которые могут поворачиваться через посредство снабженных зубчатками валов.15, приводимых в действие от руки маховиком 2. Подведение любой пары консольных поперечин под поднимаемыезвенья осуществляется путем сцепления находящейся при муфте 4 (фиг. 3) шестерни с валом 15, что достигается переводом соответствующего рычага. Другой конец поперечин 17 поддерживается соответствующими уголками, расположенными...
Копирующий манипулятор

Номер патента: 946918
Опубликовано: 30.07.1982
МПК: B25J 13/02
Метки: копирующий, манипулятор
...деформированы, погенциометры59469 находятся в среднем (нейтральном) положении, Вэтом состоянии прн угловом перемещении губок 1 (которое вызывает продольное перемещение звена 3 относитещ но первого корпуса 2 ) на этот же самый угол перемещаются и губки 7 за счет продольного перемещения звена 9 относительно второго корпуса 8. Последнее объясняется тем, что задающий и исполнительный схваты в данном случае раба тают в следящем режиме, так как исполнительный привод второго телескопического звена отрабатывает ошибку (разность двух сигналов, поступающих с первого 6 и второго 1 2 датчиков положения), формирующуюся на выходе элемента 26 сравнения.При касании обеими губками исполнительного схвета 7 схватываемого предмета, т. е. при срабатывании...
Предыдущий патент: Комбинированный ключ
Следующий патент: Механизм ориентирования схвата манипулятора
Случайный патент: Автоматическая линия