Схема ограничения величины динамической ошибки конирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
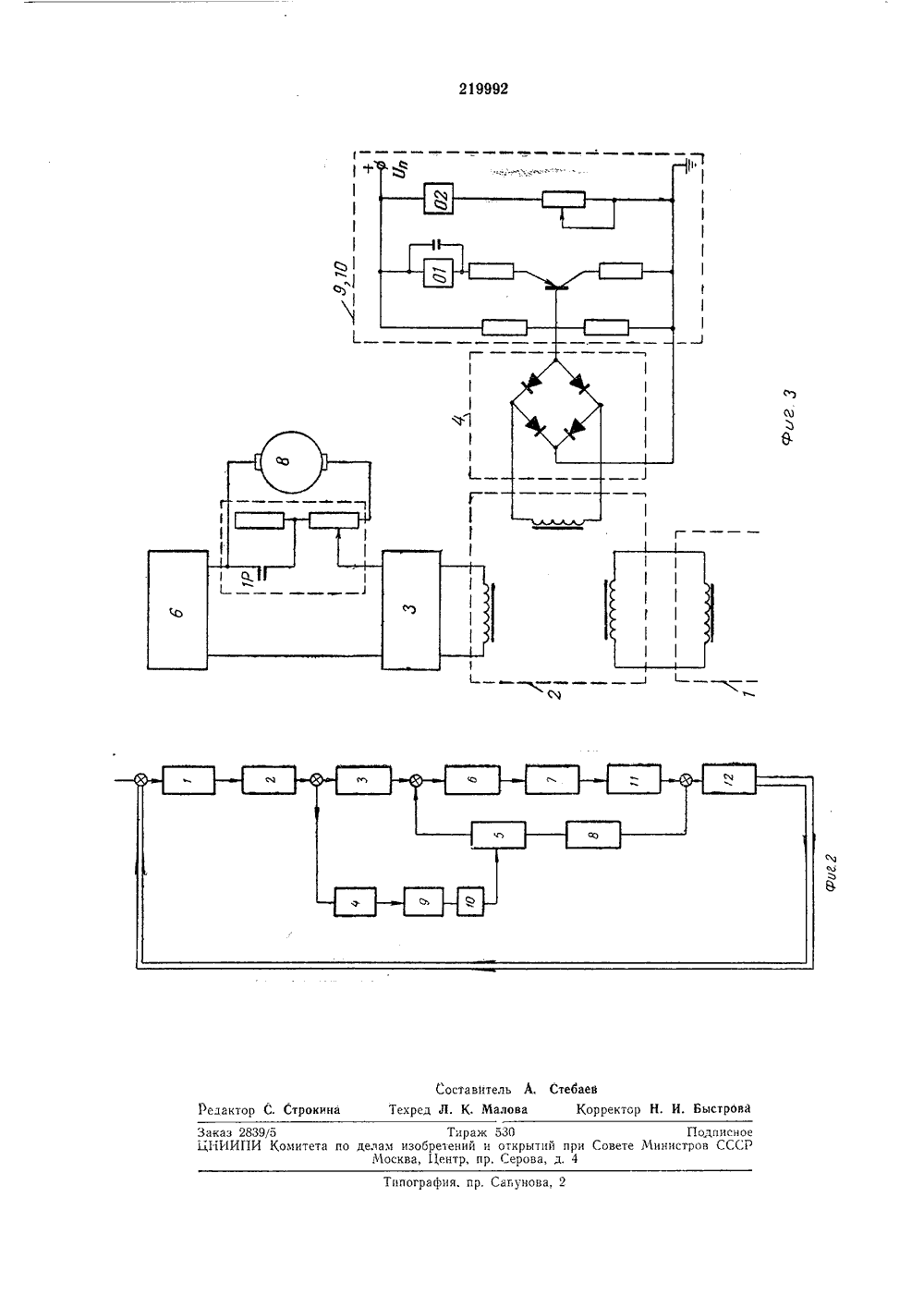
Союз Соеетскиа Социалистическиа РеспубликЗависимое от авт. свидетельства Ме л, 49 Ь, 505 3 аявле 19.Х 1,1966 (Юе 111374325-8 с присоединением заявкПриоритет 1 ПК В 23 с митет по делам обретений и открытийри Совете МинистровСССР Д К 621,914.37.06-5, Е. Верхолат, В. Н. Соловьев и Д. А. Каберма бое конструкторское бюро ост аявите ЧЕНИЯ ВЕЛИЧИНЫ ДИНАМИЧЕСКОЙШИБКИ КОПИРОВАНИЯ СХЕМА ОГ годаря этому чавия уменьшаетсющему сниженпирования.5 На фиг. 1 представлена схема расположения копира и копировального прибора; на фиг. 2 - структурная схема одного канала со спусковым устройством и схемой ограничения динамической ошибки копирования; на фиг. О 3 - принципиальная схема устройства ограничения динамической ошибки копирования.Схезта включает копировальный прибор 1,выход которого подключен к первичной обмотке промежуточного трансформатора 2. Од на из вторичных обмоток промежуточноготрансформатора 2 подключена на вход фазочувствительного выпрямителя 3, другая - к выпрямителю 4. Выход фазочувствительного выпрямителя 8 соединен через вариатор 5 с О входом электронного усилителя 6. Нагрузкойэлектронного усилителя 6 являются обмотки управления электромашинного усилителя 7.Для создания жесткой отрицательной обратной связи служит связанный с валом испол нительного двигателя 8 тахогенератор 9, нагруженный на вариатор 5. Выходная цепь выпрямителя 5 подключена на вход полупроводникового усилителя 10, нагрузкой которого является обмотка 01 электромагнитного реле 11. О Обмотка 02 этого реле включена на незавиИзвестны схемы следящего привода копировально-фрезерных станков с пропорциональным непрерывным управлением, в которых скорость привода подачи в процессе копирования изменяется за счет изменения величины и фазы сигнала управления, поступающего со вторичной обмотки индуктивного датчика копировального прибора. Этот сигнал через фазочувствительный выпрямитель, электронный и электромашинный усилитель изменяет величину и полярность напряжения на якоре исполнительного двигателя привода подачи.При обработке изделий с резкими изменениями контура на больших скоростях копирования частота управляющего воздействия может превысить допустимую величину для существующей электромеханической следящей системы. Это приведет к увеличению динамической ошибки следящей системы. Уменьшение динамической ошибки в таком случае возможно за счет снижения скорости копирования только в той части контура изделия, где имеет место его резкое изменение,С этой целью в систему следящего привода предложено ввести спусковое устройство, срабатывающее при превышении динамической ошибки копирования заданной величины и снижающее скорость копирования за счет существенного увеличения глубины жесткой отрицательной обратной связи по скорости. Бластота управляющего воздеистя, что приводит к соответству. ию динамической ошибки ко.219992 РоГ 1 симый источник питания Сдля создания магнитного потока, встречного по отношению к потоку обмотки 01, Контакт 1 Р реле 11 включен в цепь вариатооа 5.Сигнал рассогласования с выхода индуктивного датчика копировального прибора 1 через трансформатор 2 поступает на вход спускового устройства 4, 10, 11 и выпрямителя 3. Выходное напряжение этого выпрямителя включено встречно с напряжением якоря тахогенератора 9, Результирующее напряжение выпрямителя 3 и тахогенератора 9 усиливается усилителями б и 7. Напряжение с выхода усилителя 7 подается на якорь исполнительного двигателя 8, который через редуктор 12 перемещает узел станка. Величина жесткой отрицательной обратной связи по скорости изменяется с помощью вариатора 5.Если в процессе копирования величина динамической ошибки превысит заданное значение, то сигнал с индуктивного датчика копировального прибора 1 увеличит ток в обмотке 01 реле 10 до величины тока срабатывания и контакт 10 разомкнется. Это приведет к увеличению жесткой отрицательной обратной связи по скорости исполнительного двигателя ик уменьшению скорости копирования,Предмет изобретения Схема ограничения величины динамическойошибки копирования в следящем приводе копировально-фрезерного станка, содержащая 0 копировальный прибор с индуктивным датчиком, сигнал которого, усиленный фазочувствительным выпрямителем-усилителем напряжения и мощности, управляет двигателем подачи с жесткой отрицательной обратной связью 15 по скорости, отличающаяся тем, что, с цельюповышения точности копирования, в схему введено спусковое устройство, срабатывающее при достижении динамической ошибки заданной величины, увеличивающее глубину жест кой отрицательной обратной связи по скорости, например, за счет введения добавочного сопротивления в цепь этой связи при размыкании контактов электромагнитного реле и уменьшающее скорость копирования.Составитель А. Стебаевредактор С. Строкина Техред Л. К. Малова Корректор Н. И. БыстровЗаказ 28395 Тираж 530 Подписное1 л 1 йИИПИ Комитета по делам изобретений н открытий при Совете Министров СССРМосква, Центр, пр. Серова, д. 4Типография, пр. Сапунова,
СмотретьЗаявка
1113743
М. Е. Верхолат, В. Н. Соловьев, Д. А. Каберман Особое конструкторское бюро станкостроени
МПК / Метки
МПК: B23C 1/16, B23Q 35/12
Метки: величины, динамической, конирования, ограничения, ошибки, схема
Опубликовано: 01.01.1968
Код ссылки
<a href="https://patents.su/3-219992-skhema-ogranicheniya-velichiny-dinamicheskojj-oshibki-konirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Схема ограничения величины динамической ошибки конирования</a>
Следящая система с автокоммутируемым контуром отрицательной обратной связи

Номер патента: 1062647
Опубликовано: 23.12.1983
МПК: G05B 23/02
Метки: автокоммутируемым, контуром, обратной, отрицательной, связи, следящая
...при одном знаке сигнала 40ошибки управленця,10 15 Цель изобретения - улучшение качества переходного процесса путем уменьшения величины перерегулирования и снижения колебательности. Для достижения поставленнойцели вход системы соединен с инвертирующим входом сумматора, а блок изменения структуры содержит схему сравнения, два ключа и две схемы выделения абсолютного значения, подключенные своими выходами к соответствуюим входам схемы сравнения,55 вход первой схемы выделения абсолютного значения подсоединен квходу первого ключа и первому входу блока изменения структуры, вход второй схемы, выделения абсолютного 60 значения - к входу второго ключа и второму входу блока изменения структуры, управляющие входы ключей соединены с...
Устройство для определения величины динамического ограничения скорости движения автомобиля

Номер патента: 737274
Опубликовано: 30.05.1980
МПК: B60T 17/22, G01M 17/007
Метки: автомобиля, величины, движения, динамического, ограничения, скорости
...достижения максимально воз-.можного замедления фиксируется в моментдостижения установившегося значения замедления при продолжающемся росте давления в приводе тормозов или при макси,мально возможной величине давления.Параметры давления, используются,кроме того, для,коррекции параметров замедления (например, времени срабатывания привода,и времени нарастания замедления до максимума) а завиеимости от скорости включения тормозав, т. е. от отклонения режима торможения от экстренного,выдает ее:на выходное запожинающее устройство 10.Если максимально возможное замедле. ние в данном торможении достигнуто, то схема 7 выдает разрешение,на прием информации в выходное запоминающее устройство 10, куда и заносится из операционного блока 9 уровень...
Способ измерения фазовой скорости и сопротивления связи периодических волноводов

Номер патента: 245186
Опубликовано: 01.01.1969
МПК: G01R 27/32
Метки: волноводов, периодических, связи, скорости, сопротивления, фазовой
...до тех пор, пока резонансная кривая резонатора не станет двугорбой, с равными максимумами, а затем по известным электро- динамическим параметрам линии-зонда и измеренному частотному интервалу между максимумами резонансной кривой рассчитывают фаз овую скорость гармоники поля волновода, равную скорости волны линии-зонда. С торцевыми стенками резонатора линия-зонда должна иметь электрический контакт, обеспечивающий короткое замыкание ее концов. Желательно, чтобы линия-зонд представляла собой некоторую однородную линию или имела такую периодическую структуру, поле которой практически описывается только одной пространственной гармоникой, Если это не выполняется, то измерения могут быть неоднозначными. Кроме того, должно быть предусмотрено...
Устройство для формирования сигнала обратной связи системы управления гидроагрегатом

Номер патента: 947821
Опубликовано: 30.07.1982
Авторы: Башнин, Давидсон, Родионов, Семенов, Федоров, Щеголев
МПК: G05B 11/01
Метки: гидроагрегатом, обратной, связи, сигнала, системы, формирования
...сигнала по высокочастотному входу лежит в пре- делаМ 0,7-1, т.е. эти частоты принадлежат полосе пропускания высокочастотного входа. Этот согласованный фильтр используется для замены в области высоких частот сигнала фактической активной мощности, имеющего большие динамические погрешности, сиг налом прогнозируемой активной мощности, .Формируемьак беэынерционно в функции от открытия и напора.Блок 11 моделирования гидравлйческого удара в общем случае пред ставляет нелинейный фильтр высокой частоты, передаточная функция которого определяется из следующих соображенийПри жесткой связи генератора с 10 системой регулирования электрическая мощность, отдаваемая в сеть при перемещении регулирующего органа, совпадает численно с моментом,...
Стенд для исследования динамических характеристик передач с гибкой связью

Номер патента: 1566255
Опубликовано: 23.05.1990
Авторы: Кулаков, Чичинадзе, Шмелев
МПК: G01M 13/02
Метки: гибкой, динамических, исследования, передач, связью, стенд, характеристик
...ежимиспытаний задается при помощи нагружающего устройства 11 за счет регулирования усилия упругого элемента 12.2 з и. ф лы, 3 ил,Стенд работает следующим образом.Перед проведением испьгганий пред-варительное натяжение Р ветвей испыотуемой гибкой связи 10 устанавливают перемещением соответствующего несущего элемента (шкива) 7-9 по прорезям поводка 6 с одновременным контролем величины усилия С 1 фиг,3) динамометра (не обозначен) которая связана с Ро зависимостью Затем настраивают стенд на заданный режим для передачи определенной мощности при помощи нагружающего уст= ройства 11, при этом величину нагрузки регулируют упругим элементом 1 2.При включении электродвигателя 1 поводок 6 вращает несущие элементы 7-9, которые начинают...
Предыдущий патент: Устройство для подачи инструмента в металлорежущих станках
Следующий патент: Направляющее устройство
Случайный патент: Фрезерный комбинированный культиватор