B23Q 35/12 — электромеханические
Сварочный автомат для сварки прямолинейных и криволинейных угловых швов тавровых соединений

Номер патента: 81533
Опубликовано: 01.01.1949
Авторы: Лушков, Мышковский
МПК: B23K 37/04, B23K 9/10, B23K 9/18 ...
Метки: автомат, криволинейных, прямолинейных, сварки, сварочный, соединений, тавровых, угловых, швов
...Г 1. Где 1 - -муфта сцспления, 2 - двиГатель 3 - рс;укт 01), -) и .) - -Веду 1 ппс ко,.Ссл 6 - 1 Опирм)ОНи ролик, / - рулсвос колесо. Нл 1,)п. -) клз)по ПоиО)КЕНИЕ руЛЕБОГО ролика ,На фИГ. оо - ПОЛОЖСПИС ЭЛСК и)ОДЛ ОТПО- с)1 те;1 ьно кромок П 1 ва.Г 1 ри помони сцспнои уть) 1 можно ПОдкгюП 1 ть 1 е дв.атс,1 О 2 с 1)сз редъктор .) только ОДИО ходовое ко,ссО (Г ПГи:) 1, хотс 1 Б,и - ется Внеппи) и Отношони 10 к 1)азделкс швл. 11 рп Что 1 .3;1 П.11),).с;) ЛОЖЕПИС ХОДОБЬХ КОГ 1 СС У И д И КОПИРГЮ 1 ЦЕО РОЛ 1 л 1 ТЛКОБСГО НЛ. правленис .1 пижепи 5 хо;ОБО асти вектор )1 сВ 1151.О11 О -в сторону разделки шва по Отношению к напраьленшо Берт): лльпор СТЕНКИ Тав 1)а ВЕКТОР Р) И, КРОЛЕ ТОГО, РУЛЕВО 1 У КОЛЕСУ I ТЛЖС Задаетс 51 5 ебо.ьп 01...
Трехвалковый станок для гибки профильного металла с гидравлическим приводом нажимного ролика

Номер патента: 89728
Опубликовано: 01.01.1950
Автор: Денисенко
МПК: B21D 7/12, B23Q 35/12
Метки: гибки, гидравлическим, металла, нажимного, приводом, профильного, ролика, станок, трехвалковый
...8, включаюших гидравлический привод нажимного ролика станка. Световое пятно фотовизора б проектируется от источника света 9 на линию чертежа. Лучи, дающие световое пятно на чертеже, отражается от последнего и попадают на фотоэлемент 10, в котором создается электрический)1 о 8 128ток, усиливасмый с помощьк) ус 11 лпсля фотонБора, Лл 5 устранен 5 т дейстшя постороннего света свет фотовпзора с помощью электромотора 1 моду)Ирметс 51 иа опрсде)Спнмю частот, 1:а которую и настраивается усилитель фототока.Фотовизор прп помоп 1 И в;Пта 12 движетс 51 В направлл 151 и, 51 аралниравлс 1 П 1 О дв 1:кснп 5 Нажимного ролика гпбоцного устройства. 11 ри движепи 1 фотоизсра. ссли световое пятно начппае-. сходить с нерпой липни масштабного...
Устройство для ручного управления автоматической обработки криволинейных поверхностей в станках с электромагнитными муфтами

Номер патента: 107631
Опубликовано: 01.01.1957
МПК: B23Q 35/12
Метки: автоматической, криволинейных, муфтами, поверхностей, ручного, станках, электромагнитными
...во вращение барабан 2. Барабан выполнен кц: ООрязо), что Одна ПО,О виня е о вляется металл цческой, а другая половица - неметяллическоц. ПО б)рбян скользит ролик 3, который ч(рсз рейку 4 и шестершо 6 связан с ркоятко 6.Вращением рукоятки 6 ролик 3 перемспается вдоль бярабаа. К мета,лич(ской части барабаня подключена через щеточный контакт Л катушка реле РП, контакты которого управляют муфтами продольного и поперечного перемецецця.Сорикосновсние ролик;: с металлической частью барабана создает цепь включения реле РП, я при соиркосновснни с неметялличсскон Лсьо - реле откгКлается.хог,я ролик рясно,н)жсн В середине барабаня, то периоды вкк) ения и отксггоения рсГе РП равны, т. е. рВны времена срабатывания муФт Гро,Рльно 0 и 1...
Электромеханическая двухкоординатная следящая система для автоматического копирования контуров произвольной формы

Номер патента: 110990
Опубликовано: 01.01.1957
Авторы: Письменный, Розин
МПК: B23C 1/16, B23Q 35/12
Метки: двухкоординатная, контуров, копирования, произвольной, следящая, формы, электромеханическая
...магнитных систем индуктивногодатчика вызывает изменение индуктивных сопротивлений их катушек.Индуктивный датчик посредством мостовой,"хемы дает сигналы, проорциональные по величине и соответствующие по знаку отклонению копировального пальца от своего нейтрального положения (опибке при слежении по контуру копира), определяемого нейтральным (симметричным)положением якоря индуктивного датчика между магнитными системами,При нейтральном (симметричном) положении якоря рычаг копировального пальца отклоняется от оси копировального прибора (от соосного положения) на некоторый угол, величина которого зависит от зазора между магнитными системами. Величина последнего устанавливаетсяодин раз при наладке станка и в дальнейшем при его...
Электромеханическое копировальное устройство для автоматического копирования замкнутых контуров

Номер патента: 112407
Опубликовано: 01.01.1958
Авторы: Кузьмин, Обухов, Сухов
МПК: B23Q 35/04, B23Q 35/12
Метки: замкнутых, контуров, копировальное, копирования, электромеханическое
...являющейся измерительным прибором для поворота головки, с распределителем скоростец в функции угла наклона обрабатываемого профиля.112407При изменении профиля копира 5 происходит поворот серьги 2 по радиусу Я, что вызывает через ускорительную передачу поворот ротора сельсина-трансформатора б. В среднем положении серьги напряжение на выходе сельсина-трансформатора равно нулю, а при повороте ее в какую-либо сторону на выходе сельсина-трансформатора появляется напряжение, величина которого определяется углом, а фаза - направлением поворота. Это напряжение подается на вход электронного усилителя 7, на выходе которого включены обмотки электромашинного усилителя 8,От этого электромашинного усилителя питается элетродвигатель 9 поворота...
Машина для профильной кислородной резки

Номер патента: 112620
Опубликовано: 01.01.1958
Автор: Анопов
МПК: B23K 7/10, B23K 9/10, B23Q 35/12 ...
Метки: кислородной, профильной, резки
...примыкает данный октант, Движение резака по прямой происходит до тех пор, пока он не достигает очередной точки поворота, в которой произойдет переключение дифференциального механизма на новое направление реза, Точка поворота задается ее координатами относительно точки, принятой за начало координат.Для отсчета абсциссы предусмотрены контактные барабаны 31 и 32, а для отсчета ординаты - барабаны 33 и 34 (на схеме поверхности барабанов показаны в развернутом виде: зачерненная часть поверхности - проводник, светлая - изолятор). Барабаны связаны с валами 25 и 26 шестеренными передачами, подобранными так, что одному миллиметру перемещения резака по оси Х и У соответствует один оборот вала 25 или 26.В конце каждого оборота барабаны 31 и...
Устройство для дистанционного управления газорежущим станком

Номер патента: 116802
Опубликовано: 01.01.1958
Авторы: Колыженков, Крулович, Шухман
МПК: B23K 7/10, B23K 9/10, B23Q 35/12 ...
Метки: газорежущим, дистанционного, станком
...связан с колесом 10, слулкящим для пе)Смещения рял 1 ы по цяпрзвляОщим 2, Второй датчик 11 так 7 ке закреплен ня раме 1, а ротор его связан с колесом 12, которое перекатывается по штанге 5 при перемещении последней. Исполнительное у"тройство выполнено аналогично копирному устройству: той разницей, что на каретке 17 вместо копирного ролика закреплен резак 14, а рама 15 снабжена двумя электродвигателями 16 и11680217, с помощю которых рама 15 перемещается по направляющим 18, каретка 13 со штангами 19 по направляющим 20, расположенным перпендикулярно к направляющим 18.Работа всего устройства происходит следующим образом. При движении копирного ролика 7 по контуру копира 8 роторы датчиков 9 и 11 получат вращение. Роторы сельсинов 21 и 22 в...
Электромеханическая следящая система для копировальных станков

Номер патента: 124277
Опубликовано: 01.01.1959
Авторы: Гвоздев, Монахов, Черников
МПК: B23Q 35/04, B23Q 35/12
Метки: копировальных, следящая, станков, электромеханическая
...подачей. Синусно-косинусный потенциометр управляет таким образом, что скорость одного электродвигателя меняется по закону синуса, а другого - по закону косинуса, в результате чего вектор результирующей подачи остается постоянным по величине. Величина максимальной подачи зависит от величины напряжения, снимаемого с регулятора 4 максимальной подачи. Привод ползунка синусно-косинус- ного потенциометра 2 осуществляется от электродвигателя 6 постоянного тока через электромагнитные муфты 6 и 7. В качестве командного аппарата в системе использован электроконтактный датчик 8, команды от которого через реле 9 и 10 поступают на электромагнитные муфты подачи в зависимости от положения переключателя четверти 11, Управление муфтами подач и обход...
Способ автоматического регулирования процесса гибки труб на станках с программным управлением

Номер патента: 164775
Опубликовано: 01.01.1964
Автор: Руманов
МПК: B21D 7/12, B23Q 35/12
Метки: гибки, программным, процесса, станках, труб, управлением
...полной кривизны детали в каждой точке осуществляют в функции момента гиба.Это позволяет компенсировать ошибки пружи пения.Способ поясняется чертежом.Сигнал от программирующего органа 1 с информацией о заданной кривизне ср 1 поступает в орган сравнения 2 следящей системы, управляющей движением гибочного ролика 3.Сигнал датчика момента 4 поступает в тензометрический усилитель б, затем в функциональный преобразователь б, В решающее устройство 7 поступает значение срс с дагчика гулирования с программРазность срс) - ср 2 под ния 2 следящей систе 5 ство и преобразователь па базе дискретных и тов (например, на опе постоянного тока).а ется в ор мы, Решаюмогут быт ли аналого рационных н сравнеее устрой- построеных элемен- силителях...
181961

Номер патента: 181961
Опубликовано: 01.01.1966
Автор: Руманов
МПК: B21D 7/12, B23Q 35/12
Метки: 181961
...и вания проограммнымотличаюии ошибок прерывный ны детали ункцин заСпосоцесса г 0 управлеикайся т пружин активнь в кажд програм По авт, св.164775 известен способ автоматического регулирования процесса гибки труб на станках с программным управлением.Предложенный способ является дальнейшим развитием указанного способа и состоит в том, что регулирование и непрерывный активный контроль полной кривизны детали в каждой точке осуществляют в функции запрограммированной кривизны.На чертеже изображена функциональная схема способа.Сигнал от программы 1 поступает в орган сравнения следящей системы 2.Туда же поступает из решающего устройства 3 разность сигнала обратной связи с датб автоматического регулиро ибки труб на станках с пр нием по авт....
Схема ограничения величины динамической ошибки конирования

Номер патента: 219992
Опубликовано: 01.01.1968
Авторы: Верхолат, Каберман, Соловьев
МПК: B23C 1/16, B23Q 35/12
Метки: величины, динамической, конирования, ограничения, ошибки, схема
...управляющего воздействия может превысить допустимую величину для существующей электромеханической следящей системы. Это приведет к увеличению динамической ошибки следящей системы. Уменьшение динамической ошибки в таком случае возможно за счет снижения скорости копирования только в той части контура изделия, где имеет место его резкое изменение,С этой целью в систему следящего привода предложено ввести спусковое устройство, срабатывающее при превышении динамической ошибки копирования заданной величины и снижающее скорость копирования за счет существенного увеличения глубины жесткой отрицательной обратной связи по скорости. Бластота управляющего воздеистя, что приводит к соответству. ию динамической ошибки ко.219992 РоГ 1 симый...
Способ программирования вспомогательных движений контурных копировально-фрезерныхстанков

Номер патента: 220722
Опубликовано: 01.01.1968
Автор: Киселев
МПК: B23C 1/16, B23Q 35/12, G05G 21/00 ...
Метки: вспомогательных, движений, контурных, копировально-фрезерныхстанков, программирования
...подвижной части с что, с целью упрощ сокращения времен позициях, определя О точки обрабатывяех ных или полярных ют оляпки одновр последовательно вк цепьпоявления эл 5 рьгс выдают коман влснс требуемого ня.Известны способы управления циклом в системах программного управления, так называемые цикловые системы программного управления, которые обеспечивают включенис требуемого вспомогательного движения путем воздействия кулачков-упоров на электро- переключатели командоаппарата,Предлагаемый способ упрощает программирование и сокращает время на переналадку станка.С этой целью в позициях, определяющих по ложение заданной точки обрабатываемого контура в прямоугольных или полярных координатах, устанавливают кулачки, одновременно воздействующие...
Следящая система для автоматического копирования

Номер патента: 395234
Опубликовано: 01.01.1973
Авторы: Андреев, Коваль, Малюк, Поздеев
МПК: B23Q 35/12
Метки: копирования, следящая
...работает следующцм образом.5 10 15 20 25 30 35 40 45 Задатчиком скорости 4 копирования устанавливается требуемая скорость. При равенстве угла копирования углу поворота ротора СКВТ 2 относительно задающей статорной обмотки якорь копировального прибора находится на своей оси (т, е. ошибка, копирования равна нулю, и на выходе КП 1 сигнал отсутствует, а скорости подач по осям Х и У определются величиной напряжения на задающей статорной обмотке СКВТ 2 и углом ловорота ротора СКВТ 2 относительно этой обмотки, т. е, соответственно величиной управляющих напряжений У,. и У, (см. фиг, 2 б). При появлении ошибки копирования, т. е. отходе якоря КП 1 от среднего положения, на выходе прибора появляется напряжение, пропорциональное величине...
Следящая система для автоматического копирования

Номер патента: 603564
Опубликовано: 25.04.1978
МПК: B23Q 35/12
Метки: копирования, следящая
...радиального перемещения, Напряжение Оподается с СКВТ 2 (фиг, 1),Система работает следующим образом, ЮСкорость копирования устанавливается задатчиком 1, При равенстве угла копирования (угла между касательной в точке копирования и тангенциальной составляющей вектора скорости копирования) углу, поворо- И та ротора СКИТ 2 относительно задающей статорной обмотки якорь копировального прибора находится на своей оси, т.е. ошибка копирования равна нулю и на выходе КП сигнал отсутствует, а угловая и радиальная З 0 скорости определяются величиной напряжения на задающей статорной обмотке СКВТ 2 относительно этой обмотки, т.е, соответственно величиной управляющих напряжений 0 р и О (фиг, 1). При появлении Зб ошйбки копйрования (при отходе якоря КП 1...
Копировальное устройство

Номер патента: 657966
Опубликовано: 25.04.1979
Авторы: Евстигнеев, Остренко, Строев
МПК: B23Q 35/12
Метки: копировальное
...этом остается в среднем положении, т, к. жесткость пружинь 1 12 ныне жесткости упругой герметизирукушей трубки 5. Величина поворота якоря 3 зависит от величины сигнала и от жесткости трубки 5, Заслонка 4, жестко связанная с якорем 3, прикрывает сопло 13 и приоткрывает сопла 14, вследствие чего давление под левым торцом золотника 17 увеличивается, ы он смещается вправо.Напорная магистраль соединяется с гидромагистралью 19, и жидкость поддавлением поступает в правую полость силового гидроцилнндра 20, Из левой полости гидроцилиидра 20 жидкость по гидромагистрали 18 через золотник 17 поступает в сливную магистраль, Корпус 1 с кареткой 22 и инстру. ментом 23 смешаются к обрабатываемой детели 24. Копир 10 и обрабатываемая деталь 24...
Следящая система для автоматического копирования

Номер патента: 770750
Опубликовано: 15.10.1980
Авторы: Борисов, Дроздов, Синичкин
МПК: B23Q 35/12
Метки: копирования, следящая
...за кривизной копируемого контура и связанные с этим методом погрешности, вносимые оператором, и обеспечивает дистанционный контроль кривизны.На чертеже приведена блок-схема следящей системы для автоматического копирования.Система содержит копировальный прибор 1, синусо-косинусный вращающийся 1 ф трансформатор 2, привод 3 поворота ротора вращающегося трансформатора, приводы 4, 5 подач по осям Х, У, задатчик 6 скорости, блок 7 фиксирования кривизны, датчик 8 угла поворота ротора, коммутатор 9, генератор 10, запоминающие ячейки 11, 12, блок 13 вычитания, индикатор 14 кривизны.Система работает следующим образом.В установившемся режиме угол поворота ротора вращающегося трансформатора 2 соответствует углу снаклона вектора ско в рости при...
Система управления копированием
Номер патента: 965726
Опубликовано: 15.10.1982
Автор: Синельников
МПК: B23Q 35/12
Метки: копированием
...образом.Исходное положение устройства: генератор 1 выключателем 19 отключен от бло ка питания 18, резец установлен в исходную точку на обрабатываемой поверхности детали, щуп датчика 20 установлен в исходную точку на профиле копира. При включении станка контакты 21 - 24 датчика 20 подают команды на электромагнитные муфты 31 - 34 направлений движения резца, что обеспечивает точное совпадение профиля детали профилю копира. При возникновении в процессе обработки детали непрерывной стружки, выключателем 19 подключают генератор 1 к блоку питания 18. Управляя временем заряда конденсатора 10 через сопротивление 2, 11 и 12 и временем разряда конденсатора 1 О через сопротивления 15 и 16 с, помощью усилителя, состоящего из элементов 2, 4 - 9,...
Система управления копированием
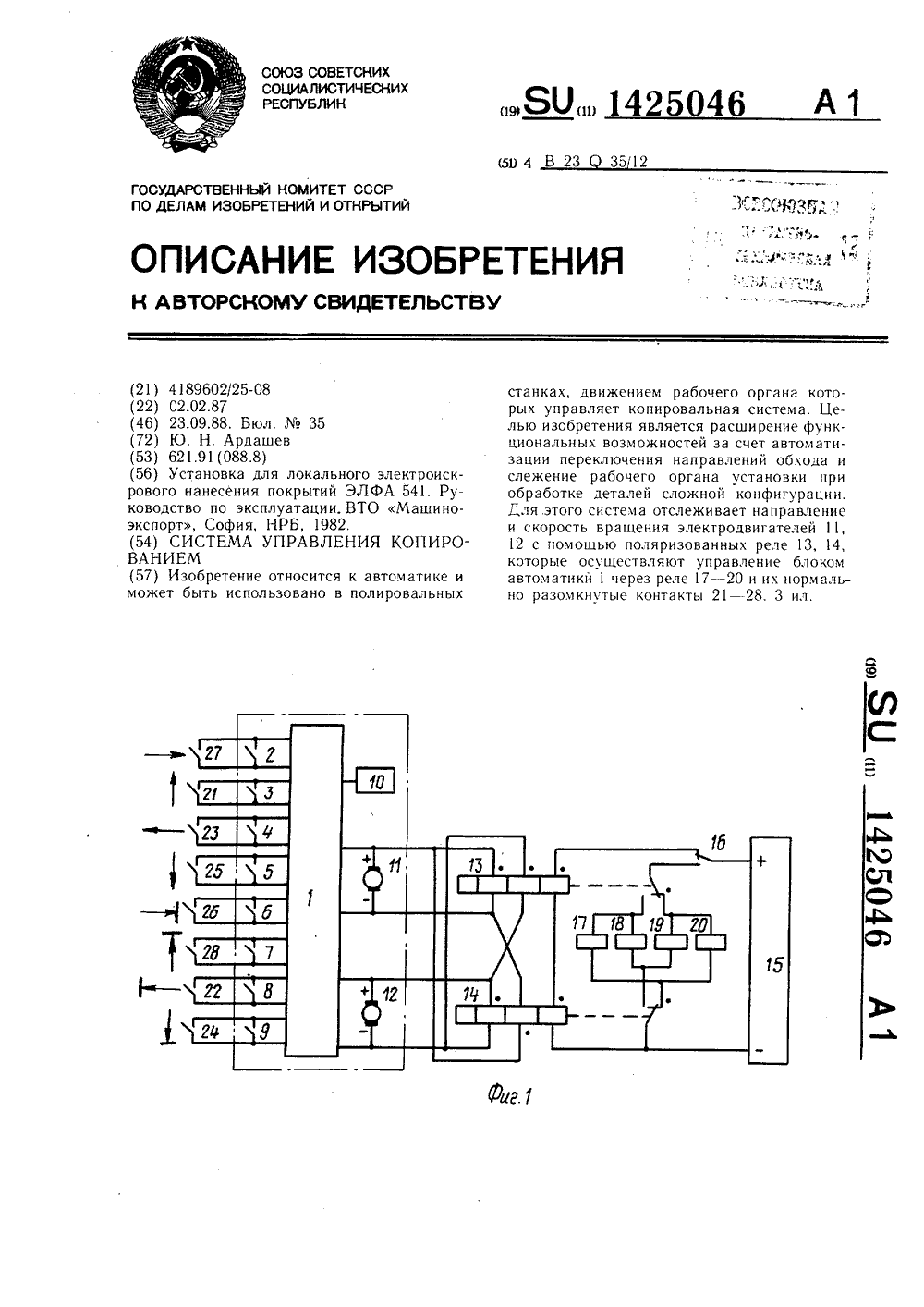
Номер патента: 1425046
Опубликовано: 23.09.1988
Автор: Ардашев
МПК: B23Q 35/12
Метки: копированием
...в противоположную сторону, В процессе копирования переключение поляризованных 20 реле 13 и 14 происходит в случае, когда напряжение на одном из электродвигателей 11 и 12 больше, чем на другом, и в зависимости от состояния контактов этих реле срабатывает одно из четырех реле 17 - 20, два нормально разомкнутых контакта которых определяют направление движения обхода и слежения. Для работы в автоматическом режиме необходимо переключателем 16 подключить блок 15 питания к подвижному контакту поляризованного реле 13, а так как 30 поляризованные реле 13 и 14 находятся висходном состоянии, то срабатывает реле 20 и, воздействуя своими контактами 27 и 28 на блок 1 автоматики, вызывает движение датчика 10 по оси Х с заданной скоростью,а в...