Задающее устройство для дистанционного управления роботом манипулятором
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1825730
Автор: Бондаренко

Текст
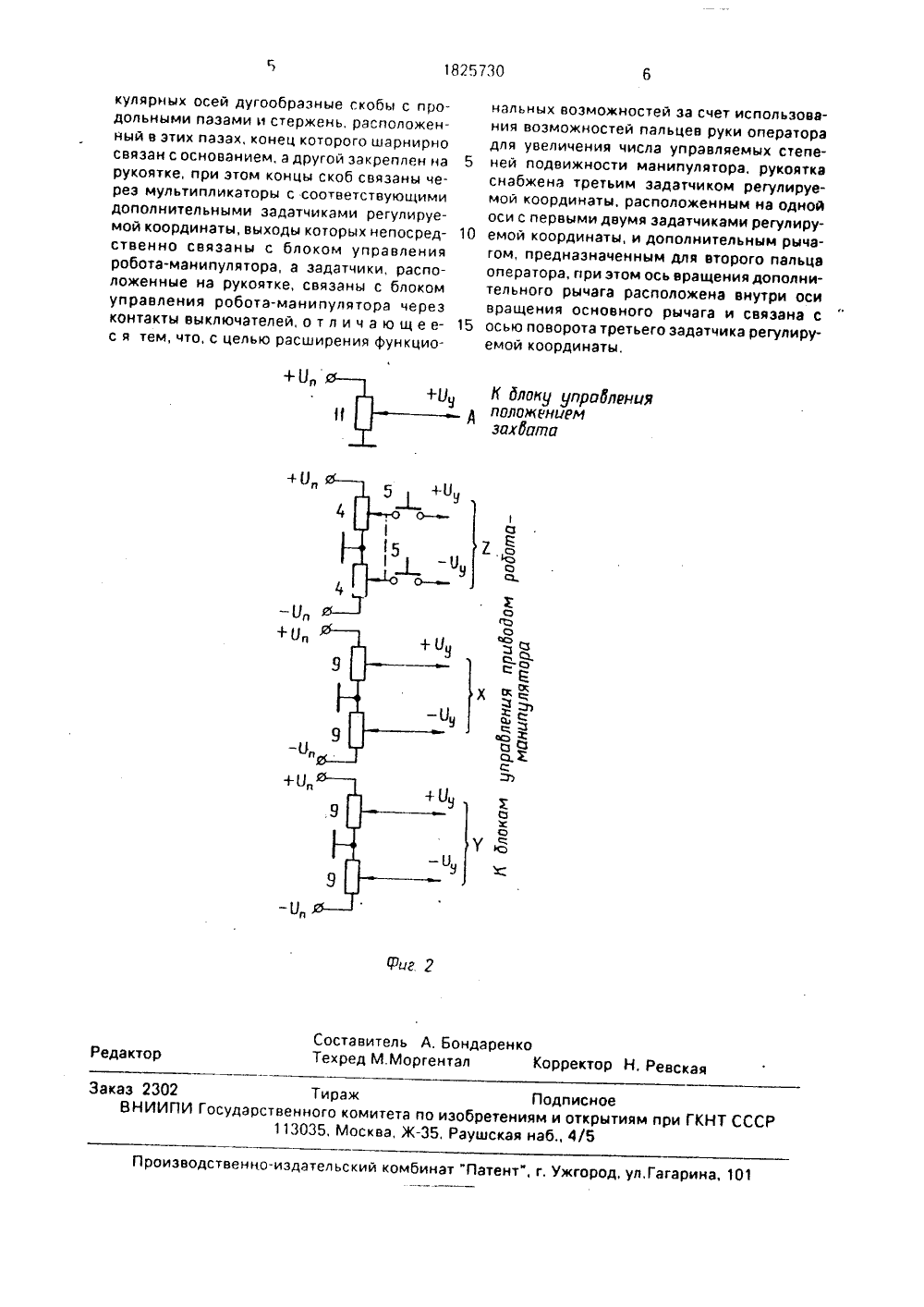
)5 В 25 Л 13/О ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССР(ГОСПАТЕНТ СССР) ОПИСАНИЕ ИЗОБРЕТЕНИЯ МУ СВИДЕТЕЛЬСТВ АВТО ОЧ(56) Авторское свидетельство СССРМ 1516344, кл. В 25 Л 13/02, 1989.(54) ЗАДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РОБОТОММАНИПУЛЯТОРОМ(57) Использование: в робототехнике дляручного управления перемещением исполнительного органа робота-манипулятора. Сущность изобретения: устройство, содержащее рукоятку 1, рычаг 2, ось 3, два задатчика 4 регулируемой координаты, установленные на рукоятке два выключателя 5, две дугообразные скобы 6 с продольными пазами, стержень 7, четыре мультипликатора 8, четыре задатчика 9 регулируемой координаты, шарнир 10, снабжено задатчиком 11 дополнительной координаты, дополнительным рычагом 12 с осью 13, 2 ил.Изобретение относится к робототехнике, в частности к задающим устройствамроботов-манипуляторов с дистанционнымуправлением, и может быть использованопри выполнении транспортных операция 5для ручного управления перемещением исполнительных органов роботов-манипуляторов э заданные точки рабочегопространства и управления их положением,например, губок захвата.10Цель изобретения - расширение функциональных возможностей устройства засчет использования возможностей пальцевруки оператора для увеличения числа управляемых степеней подвижности манипулятора.Введение перечисленных элементовпозволяет увеличить число управляемых координа- и обеспечить управление положением губок захвата исполнительного органа 20робота-манипулятора при переносе груза взаданну,о точку рабочего пространства. Этосущественно отличает настоящее изобретение от прототипа, так как позволяет расширить функциональные возможности 25устройства,На фиг.1 изображено задающее устройство; на фиг,2 - схема подключения задатчиков регулируемой координаты кроботу-м:.нипуляору, 30Зддающд ус гройс гво содержит рукоятк. 1, рыча, ось 3, дьд здддтчика 4 скоростирегулируемой ноординдты, установленныена рукоягке двд однополюсных выключателя 5, две дугообразные скобы 6 с продольными пазами, стержень 7, четыремультипликатора 8, четыре зддатчикд 9 регулируемой координаты, шарнир 10, зддатчик 11 регулируемой координаты, рычаг 12,ось 13, Стержень 7 расположен в пазах скоб 40и одним концом посредством шарнира 10связан с основанием,Усройство работает следующим образом.Для перемещения груза из исходной 45точки в заданную рабочего пространстваоператор осуществляет его захват путем поворота с помощью второго пальца руки рычагд 12 с осью 13, с которой жестко связанротор заддтчина 11 Выходное напряжение 50Оу, величина которого зависит от угла поворота здддтчикд 11, поступает нд блок управления положением захвд Гаисполнительного органа, в результате чегогубки сжимают груз, 55Для перемещения груза в зддднное пространство рабочей зоны оператор осуществляет управление перемещениемисполнительного органа по всем координатам Х, У, Л или отдельно В наиболее общем случае при перемещении исполнительного органа по трем координатам оператор с помощью рукоятки 1 отклоняет стержень 7 в заданном направлении. При этом скобы 6 поворачиваются на соответствующий угол. С концами скоб 6 через элементы зацепления (на фиг.1 не показаны) связаны мультипликаторы 8, которые передают вращательное движение скоб 6 на оси поворота соответствующих задатчиков 9 регулируемой координаты, При этом выходное напряжение Оу формируется двумя задатчиками 9 регулируемой координаты, а величины сигналов и их полярность зависят от угла отклонения стержня 7 и от места расположения этого стержня в плоскости заданного квадранта в направлении координат Х и У.Для одновременного перемещения исполнительного органа по третьей координате Л в требуемом направлении оператор на рукоятке 1 первым пальцем руки нажимает один из однополюсных выключателей 5 и осуществляет третьим пальцем руки поворот рычага 2 с осью 3, с которой жестко связаны роторы эадатчиков 4, Это приводит к изменению сигнала на выходе задатчиков 4, Выходные напряжения Оу задатчиков 4 и 9 регулируемой координаты поступают на блоки управления приводом робота-манипулятора. в результате чего исполнительный орган робота-манипулятора движется с соответствующими скоростями и в заданном направлении по координатам Х, У, 7,После прихода исполнительного органа в заданную точку рабочего пространства рукоятка 1 и рычаг 2 возвращаются в исходное состояние, Одновременно оператор отпускает однополюсный выключатель 5. Для установки груза в заданной точке оператор возвращает в исходное состояние рычаг 12,в результате чего снимается напряжение с задатчика 11 и губки захвата разнимаются.Таким образом предлагаемое задающее устройство по сравнению с прототипом эа счет использования возможностей пальцев руки оператора позволяет увеличить число управляемых координат.Формула изоб ретения Задающее устройство для дистанционного управления роботом-манипулятором, содержа цее рукоятку и установленный на ней рычаг, предназначенный для пальца оператора, два расположенные на оси рычага заддтчика регулируемой координаты, два выключателя, установленные на рукоятке с нормально разомкнутыми контактами, четыре дополнительные эадатчика регулируемой координаты и четыре мультипликатора, две расположенные на основании с воэможностью поворота вокруг взаимно перпендиСоставитель А. БондаренкТехред М,Моргентал еда ктор ректор Н, Ревск аказ 2302 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СС 113035, Москва, Ж, Раушская наб., 4/5 д, ул,Гагарина, 1 О 1 ательский комбинат "Патент", г. У роиэводстве кулярных осей дугообразные гкобы с продольными пазами и стержень, расположенный в этих пазах, конец которого шарнирно связан с основанием, а другой закреплен на рукоятке, при этом концы скоб связаны через мультипликаторы с соответствующими дополнительными задатчиками регулируемой координаты, выходы которых непосредственно связаны с блоком управления робота-манипулятора, а задатчики, расположенные на рукоятке, связаны с блоком управления робота-манипулятора через контакты выключателей, о т л и ч а ю щ е ес я тем, что, с целью расширения функциональных возможностей за счет использования возможностей пальцев руки оператора для увеличения числа управляемых степе ней подвижности манипулятора. рукояткаснабжена третьим задатчиком регулируемой координаты, расположенным на одной оси с первыми двумя задатчиками регулиру емой координаты, и дополнительным рычагом, предназначенным для второго пальца оператора, при этом ось вращения дополнительного рычага расположена внутри оси вращения основного рычага и связана с 15 осью поворота третьего задатчика регулируемой координаты.
СмотретьЗаявка
4942836, 26.04.1991
ИНСТИТУТ ЭЛЕКТРОСВАРКИ ИМ. Е. О. ПАТОНА
БОНДАРЕНКО АЛЕКСАНДР ИГНАТЬЕВИЧ
МПК / Метки
МПК: B25J 13/02
Метки: дистанционного, задающее, манипулятором, роботом
Опубликовано: 07.07.1993
Код ссылки
<a href="https://patents.su/3-1825730-zadayushhee-ustrojjstvo-dlya-distancionnogo-upravleniya-robotom-manipulyatorom.html" target="_blank" rel="follow" title="База патентов СССР">Задающее устройство для дистанционного управления роботом манипулятором</a>
Фотоэлектрическое устройство к измерительным стрелочным приборам для поддержания регулируемого технологического параметра в зависимости от задающего

Номер патента: 145017
Опубликовано: 01.01.1962
Автор: Амлинский
МПК: G05B 19/04
Метки: зависимости, задающего, измерительным, параметра, поддержания, приборам, регулируемого, стрелочным, технологического, фотоэлектрическое
...из которых управляется от руки оператором и состоит из намотанной на барабан фотопленки с фотодорожкой. Световой поток источника 4, проходя через эту фотопленку, падает на фотосопроггивления 11 и 12. Все фотосопротивзепия (5, В, 11 и 12) вклочены в мостовую измерительную схему. При изменении задающего технологического параметра возникает рассогласование мостовой измерительноР, схемы. Сигнал рассогласования воздействует на исполнительный орган 1 на чертеже цс показан), Осуц 1 ествляющий управление регулируемым параметром.Описываемое фотоэлекрцчсскос устройство применимо, например, при дозировании известкового молока в процессе дсфекации диф 11 узионного сока по количеству. Устройство вкл 1 очдется в расходомср. Прн изменении...
Манипулятор для перемещения исполнительного органа

Номер патента: 1161702
Опубликовано: 15.06.1985
Авторы: Дробот, Палагина, Прокопенко, Хабибулин
МПК: E21D 9/10
Метки: исполнительного, манипулятор, органа, перемещения
...хода цилиндров перемещения. Поэтому для сборки кровли и стеноквыработок необходимо переустанавливать исполнительный орган на стрелеманипуляторе, что значительно увеличивает затраты времени на вспомогательные опер ции, а следовательно,снижает сменную производительность,ЗОЦель изобретения - повышение маневренности исполнительного органа и повышение его эффективности.Поставленная цель достигается тем, что манипулятор для перемещения исполнительного органа, включающий стрелу из двух лучей, гидроцилиндры привода перемещения и подвижные элементы, снабжен прикрепленной к каждому лучу дугообразной направляющей с па- О вами, в которых размещены подвижные элементы для установки в них исполни тельного органа, который связанс гидроцилиндрами...
Манипулятор промышленного робота

Номер патента: 1660952
Опубликовано: 07.07.1991
Автор: Фоменко
МПК: B25J 9/12
Метки: манипулятор, промышленного, робота
...разрез; на Фиг.2 - сечение А-А на фиг,1; на Фиг.З - магнитострикционный преобразователь, расположенный в пазу сетки, разрез; на фиг.4 - схема расположения магнитострикционных преобразователей в узле сетки; на фиг.5-8 - схема деформационной волны и фазы ее развития при поступательном движении выходного звена манипулятора; на фиг.9 - 11 - схема деформационной волны и фазы ее развития при вращательном движении выходного звена манипулятора.Манипулятор содержит установленныйна одном из его звеньев цилиндрический корпус 1, в котором аксиально расположен вал 2, связанный с другим звеном манипулятора, несущимрабочий орган 3. Между внутренней поверхность корпуса 1 и валом 2 расположен привод их относительного перемещения, включающий...
Задающее устройство для исполнительного органа манипулятора

Номер патента: 1335443
Опубликовано: 07.09.1987
Авторы: Джамалов, Джолдасбеков, Слуцкий
МПК: B25J 3/00
Метки: задающее, исполнительного, манипулятора, органа
...плоской пружины, один конец которой жестко связан с основанием 1, другой - с рукояткой 2 управления. На упругом элементе 3 расположены датчики-тензорезисторы 4 на уровнях, соответствующих расположению шарнирных соединений исполнительного органа манипулятора и размещена дополнительная подвижная каретка 5.,Каретка 5 выполнена в виде четырехосной тележки, на которой размещена дополнительная рукоятка 6 управления. С последней связано фиксирующее устройство 7, выполненное в виде телескопических штоков 8 и 9 с прижимными губками О и 11. Телескопические штоки 8 и 9 кинематически связаны между собой посредством пружины 12 и рычага 13, расположенного на дополнительной рукоятке 6 управления, С осью рычага 13 жестко связан второй рычаг...
Привод исполнительного органа робота

Номер патента: 1122501
Опубликовано: 07.11.1984
Автор: Павленко
МПК: B25J 9/00
Метки: исполнительного, органа, привод, робота
...штоком силового цилиндра и взаимо действующая с регулируемыми упорами винта, при этом на винте между опо" рами установлено демпфирующее устройство и храповой механизм, выполненный в виде храповика, жестко связан ного с винтом, и собачек, снабжен дополнительным приводом перемещения собачки храпового механизма, а демпфирующее устройство выполнено в виде группы пружин, размещенных с двух сторон винта.На фиг. 1 показан предлагаемый привод исполнительного органа робота; на фиг. 2 - то же, вид сбоку.Привод робота состоит иэ неподвижного цилиндра 1 и подвижного штока 2, к которому с пбмощью пластины 3 присоединена штанга 4 с упором 5. (Могут быть варианты конструкций приводов роботов, в которых к штоку присоединяется две и больше подвижных...
Предыдущий патент: Трансмиссионное звено манипулятора
Следующий патент: Устройство для ручной распиловки длинномерных материалов
Случайный патент: Способ измерения углов дифракции монокристаллов