Патенты с меткой «движений»
Аппарат для разработки движений кисти

Номер патента: 1595514
Опубликовано: 30.09.1990
МПК: A61H 1/02
Метки: аппарат, движений, кисти, разработки
...связаццый с цей поср(.лст, вом составных стоек 12 ложсмецт предлечья3, язуОщие шярц)рцый ч(.ты)ехзяенцик11, Стойки 12 площз(ка 11 и еют опорныеИнты 15. С)сь 16 шарнирного четырех:;гс:цццкз 11:явнцрцо связана с осьО 9 цятчц 01 17..,Ппарат применяют следуюцим обраДо того, как проводить курс леченья, лечащий врач выбирает оцтимяльцуо цагруз ку ця конечность, преоблздяоцее движение кисти В сторону сгцбация или, разгибация и цужнуо амплитуду ляжеий. Величина нагрузки ця мыщцы предпле гья регулируется рукояткой 7 цагружеция. 1-1 яправление движения кисти с преимущественным рззгцбяц:ем или сгибанием в лучезапястцом сусяве регулируется угловым г(оложенцем )О(е:(ецтя 1)сдпле 1 ья 13, что лОстцгаетс 5: фиксацией стоек 1:. стоцорцыми вицтямц...
Способ определения срока начала активных движений сустава после травмы

Номер патента: 1639630
Опубликовано: 07.04.1991
Авторы: Анисимов, Башуров, Жабин, Разумов
МПК: A61B 5/0488
Метки: активных, движений, начала, после, срока, сустава, травмы
...конечности, определяют количество электрических импульсов, генерируемых исследуемыми мышцами за 5 с при максимальном изометрическом напряжении, и при увеличении частоты разрядов двигательных единиц в мышцах травмированной конечности до 500 и выше от аналогичных показателей интактных мышц, начинают активные движения в поврежденном суставе,каждой из 4-х мышц при максимальном, произвольном, изометрическом ее напряжении в течение 5 с и сравнивают показате- л ли одноименных мышц здоровой и Ос, травмированной конечностей. Аналогичное исследование повторяют через каждые 3-е суток (7, 11 суток). При увеличении частоты разрядов двигательных единиц в мышцах травмированной конечности до 50 и выше И от аналогичных показателей интактных О мышц...
Устройство для разработки движений в суставах конечностей

Номер патента: 1644956
Опубликовано: 30.04.1991
Авторы: Агаджанян, Елыков, Масленников
МПК: A61H 1/02
Метки: движений, конечностей, разработки, суставах
...13 и 14 минимальный и максимальный углы, а датчиком 8 устанавливают требуемую скорость поворота ложе- мента 3, после чего разрещают работу устройства кнопкой "Пуск" в схеме управления (не показана). При работе устройства сигнал, пропорциональный углу поворота ложемента 3 с датчика 8 поступает нв схемы 15 и 16 сравнения и сравнивается с сигналами задатчиков 13 и 14 углов.П.ри достижении угла поворота, равного заданному его значению, выдается сигнал равенства и схема 17 управления производит реверс электропривода 6.Скорость поворота регулируется генератором 12 по принципу аиротно-импульсной модуляции. Усилитель 18 мощностислужит для согласования схемы 17 управления и электродвигателя постоянного тоха электропривода б, 8 качестве...
Трехкомпонентный стенд угловых движений

Номер патента: 1647411
Опубликовано: 07.05.1991
Авторы: Кутепов, Наумкин, Полосатов
МПК: G01P 21/00
Метки: движений, стенд, трехкомпонентный, угловых
...с полуосью 2 наружной рамы, с валом б и валом 10 рабочей площадки,Каждый из приводов содержит двигатель 12, редуктор 13 и поводковый сферический.четырехзвенник, состоящий из криволинейной направляющей 14, закрепленной на выходном валу 15 редуктора 13. В криволинейной направляющей 14 размещен дуговой кривошип 16 с регулируемым углом д раствора и фиксатором 17. В подшипнике дугового кривошипа 16 размещен поводок 18, заканчивающийся вилкой 19, шарнирно связанной с полуосью 2, валом 6 или валом 10, Оси валов 2 и 15 перпендикулярны.Стенд рабогает следующим образом.Испытуемый прибор устанавливают на рабочую площадку 11, которой по отдельности или в любых комбинациях задают три незавимых колебательных угловых движения вокруг трех взаимно...
Механизм для получения вращательных пространственных движений

Номер патента: 1663518
Опубликовано: 15.07.1991
Авторы: Блохин, Гранский, Овечкин, Овсянников
МПК: G01N 23/20
Метки: вращательных, движений, механизм, пространственных
...изобретения является упрощение конструкции.На чертеже изображена схема механизма в аксонометрии.Механизм включае 1 основание 1 с установленным на нем двигателем 2, который посредством конической передачи 3-4 связан с ведущими шестернями 5 и 6 эубчаторычажных передач. На осях 7 и 8 установлены соответственно водила 9 и 10 с шестернями 11 и 12, зацепляющимися с шестернями 13 и 14. Водила 9 и 10 упруго связаны с основанием 1 для обеспечения надежного контакта зубьев в зацеплении, Шестерни 13 и 14 связаны с червяками 15 и 16 червячных передач поворота ведомого звена 17 вокруг осей Х-Х и У-У соответственно. В ведомое звено 17 устанавливается исследуемый образец 18.Механизм работает следующим образом,Вращение вала двигателя 2 передается...
Установка для создания колебательных движений объекта при аэрогидродинамических испытаниях

Номер патента: 1665244
Опубликовано: 23.07.1991
Авторы: Кузнецов, Писарев, Ямпольский
МПК: B63B 9/08, G01M 10/00
Метки: аэрогидродинамических, движений, испытаниях, колебательных, объекта, создания
...ввод колеблющейся системы в резонанс на данной частоте, то будет иметь место обмен энергией между колеблющейся. массой и упругим элементом.Для этого в цилиндр 1 от источника 10 давления через пневмотрассу 9 подается газ (в данном случае СО) под заданным с помощью регулятора 15 давлением. Газ проходит через канал 8 штока 3 в канал 11 поршня 2 и через него и каналы 12 - 14 цилиндра 1 в полости 4 и 5, Таким образом. в обеих полостях 4 и 5 цилиндра 1 устанавливается одинакОвое давление. При включении установки выходной шток 6 синусного задатчика 7 совершает возвратно-поступательные перемещения с заданной частотой и амплитудой и тянет за собой жестко с ним связанный шток 3 с поршнем 2, Поршень 2, перемещаясь в цилиндре 1, перерывает...
Устройство для разработки движений в коленном суставе

Номер патента: 1671290
Опубликовано: 23.08.1991
Авторы: Абгарян, Акопян, Кочикян
Метки: движений, коленном, разработки, суставе
...связанные ложементы бедра 27 и голени 28, последний оснащен выдвижным упором 29 стопы, Ложемент 27 45бедра связан посредством шарниров 30 и31 с осями 22 и 23 соответственно, а ложемент 28 голени - посредством шарниров 32- с дополнительной кареткой 26,Устройство выполнено симметричным 50относительно вертикальной плоскости, проходящей через ось винтового стержня 3, приэтом оси всех шарниров устройства перпендикулярны плоскости симметрии. Оно снабжается также конечными выключателями, 55установленными, например, на одной из направляющих 5 (не показаны).Устройство работает следующим образом. Ус 1 рэйство устанавливается под больную, например под правую, ногу пациента таким образом, тобы контрольная метка 8 выдвинутой...
Устройство для коррекции движений

Номер патента: 1681866
Опубликовано: 07.10.1991
Авторы: Витензон, Нечаева, Пластинин, Ройфман
МПК: A61N 1/36
Метки: движений, коррекции
...до 0.9 с. Задержка в устройстве необходима для более точной установки момента синхронизации, а также для запуска электростимулятора в фазу, например, опорного периода, когда угол первого датчика фазы движения не изменяется во времени,Сигнал с выхода первого блока 5 задержки поступает на вход формирователя 6 длительности пачки, собранного по схеме одновибратора, Регулировка длительности пачки осуществляется в пределах от 0,1 до2.0 с."В случае адаптивной коррекции движений при ходьбе устанавливается максимально возможная длительность пачки, В реальных условиях ходьбы момент окончания пачки на выходе определяется сигналом с второго датчика 7 фазы движения, поступающим через второй блок 8 задержки, служащий для задержки момента окончания...
Устройство для регистрации ростовых движений растений

Номер патента: 1683559
Опубликовано: 15.10.1991
Автор: Литинский
МПК: A01G 7/00
Метки: движений, растений, регистрации, ростовых
...и выходное б отверстил, через которые пропущена свободно размещенная в няпоанляощам элементе 1 лента 7, например, полоска рое 1 ьги, Нижний конец ленты может быть Са 1 УТ В СПИЯЛЬ Е 1, а ВОРХ 1 Ее КОНВЦ Б СНЯ. Вн зяхна омО например В Виде кольца для закрепления на верхушечной почке 11 растуцего побега 12. Направленощий элемент 1 снабжен захвата.и 13 н ида провол Оч ых кОлац длл закрапнанил еГО на г 10 баГ 8 14 гредыдущаго гсда у основания рястуща о побОГЯ 12, В полОГти кожуха 2 устсновлан дискретный отматчик 15, ныгОНен 1 ый В ниде нзаимодейСтвующего с г 81 той 7 пробойника 16, закрепленного на Одном плака 17 днуплачего рычага, второе плечо 18 когоро- ГО Взаимодействует с электОчагетом 19, упря 1 зллемым реле времени 20, Дискретньй...
Устройство для предотвращения непрограммных движений управляемых механизмов

Номер патента: 1686695
Опубликовано: 23.10.1991
Автор: Комиссаров
МПК: H03K 3/286
Метки: движений, механизмов, непрограммных, предотвращения, управляемых
...состояние, включающее связанный с ним соответствующий. выходной ключ 7 и исполнительные механизмы 14 и 15, Сигналы с выходов 4243 и 44 нулевого уровня для дополнительнйх входов сброса соответствующих элементов 5 являются командами для установки (реверса) элементов 5 в исходное состояние, отличающее его выходной ключ 7 и исполнительные механизмы 14 и 15.Если в процессе эксплуатации происходит какал-либо неисправность в любом из источников питания, в том числе при обрыве проводов или неисправности средств контроля, то напряжение на входе 36 нормали- затора 3 пропадает и сигнал установки в исходное состояние отключат ключ 4 и устанавливает элемент 5 в исходное состояние (при котором отключены ключи 7 и исполнительные механизмы 14,15)...
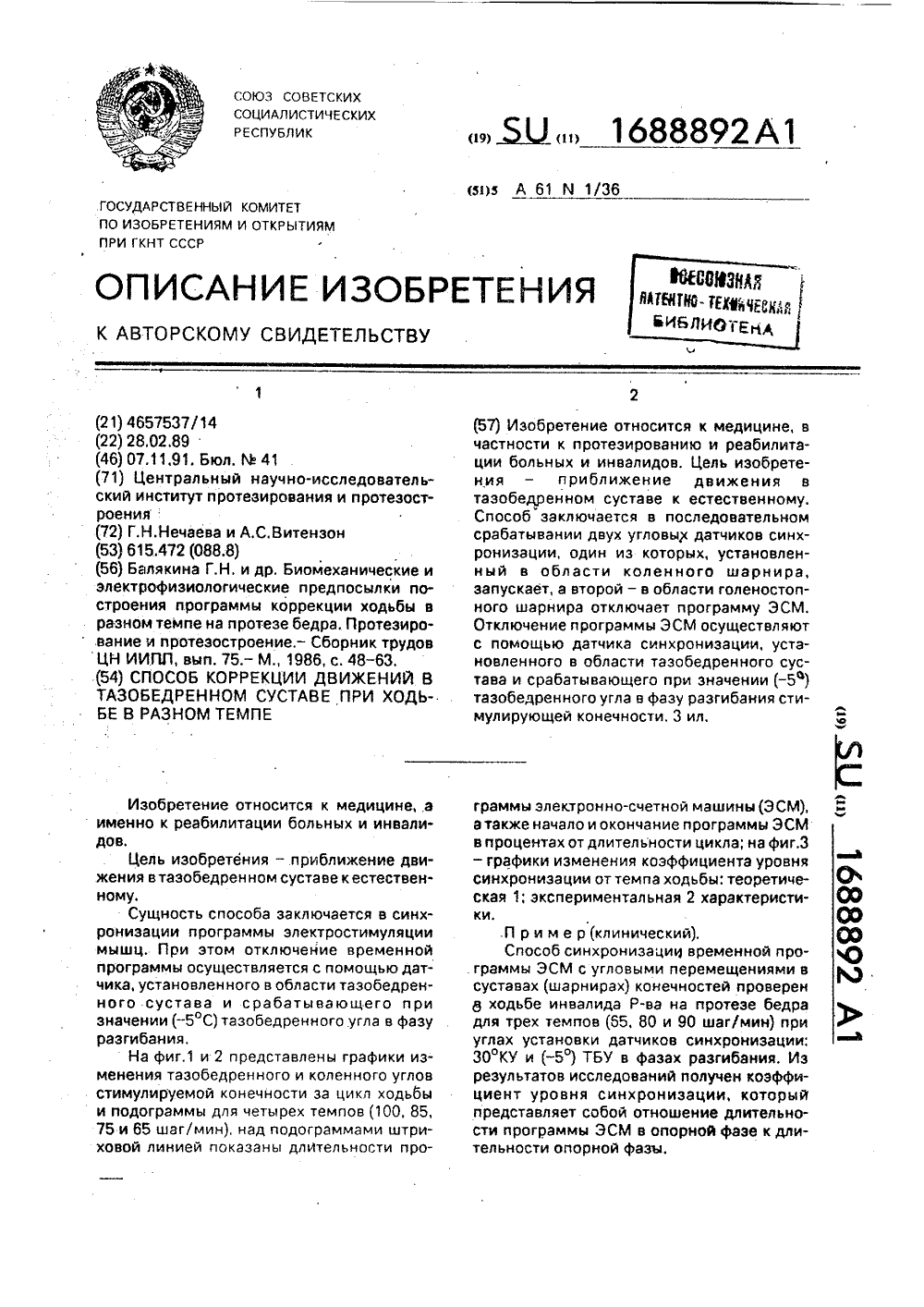
Способ коррекции движений в тазобедренном суставе при ходьбе в разном темпе
Номер патента: 1688892
Опубликовано: 07.11.1991
МПК: A61N 1/36
Метки: движений, коррекции, разном, суставе, тазобедренном, темпе, ходьбе
...один из которых, установленный в области коленного шарнира, запускает, а второй - в области голеностоп- ного шарнира отключает программу ЭСМ. Отключение программы ЭСМ осуществляют с помощью датчика синхронизации, установленного в области тазобедренного сустава и срабатывающего при значении ( - 5) тазобедренного угла в фазу разгибания стимулирующей конечности, 3 ил. граммы электронно-счетной машины (ЭСМ), атакже качало и окончание программы ЭСМ в процентах от длительности цикла; на фиг,3 - графики изменения коэффициента уровня синхронизации от темпа ходьбы: теоретическая 1; экспериментальная 2 характеристики,.П р и м е р (клинический),Способ синхронизаци 11 временной про. граммы ЭСМ с угловыми перемещениями в суставах (шарнирах)...
Устройство для формирования импульсов дыхательных движений

Номер патента: 1690681
Опубликовано: 15.11.1991
Авторы: Иоаннес, Манфред, Маттиас, Франк, Штеффен, Юрген
МПК: A61B 5/08
Метки: движений, дыхательных, импульсов, формирования
...ультразвуковой линии, состоящей из передатчика 11 и приемника 1, вихри, образующиеся в вихревой дорожке Кармана, в качестве амплитудно-модулированного сигнала приемником 1 преобразуются. в электрическое колебание.Амплитуда электрического колебания усилителем 2 увеличивается, при этом между входным и выходным сигналом усилителя 2 имеется жесткое сопряжение по фазе,Полученный сигнал с одной стороны поступает к демодулятору 12, на выходе которого имеется измерительный сигнал,пропорциональный вихревой частоте, а с другой стороны он ограничивается триггером 3. Затем он вместе с сигналом передачи от передатчика 11 подводится к схеме 4 сравнения фаз, которая может распознать разности фаз в Ьр = 02 и .Ка выходе схемы 4 сравнения фаз...
Способ предотвращения самопроизвольных движений управляемых механизмов и устройство для его осуществления

Номер патента: 1702522
Опубликовано: 30.12.1991
Автор: Комиссаров
МПК: H03K 3/286
Метки: движений, механизмов, предотвращения, самопроизвольных, управляемых
...сигнала, но которому судят о наличии напряжения на шинах источника питания датчиков и источника питания механизмов, после чего в соответствии с этим уровнем логического сигнала дополнительно воздействуют на ключ, осуществляя таким образом переход на постоянный контроль наличия напряжения источника питания датчиков и источника питания механизмов. При этом при невозбужденном состоянии второго нормализа 5 10 15 20 25 30 35 40 45 50 55 тора отключают управляемые механизмы от источника питания механизмов и источников силового напряжения, устанавливают элементы оперативной памяти блока анализа состояния датчиков в исходное состояние и прекращают воздействие на ключ, а при возбужденном состоянии второго нормали- затора - производят...
Способ контроля тренировки координации движений

Номер патента: 1708142
Опубликовано: 23.01.1992
Авторы: Батхан, Бунин, Гармизе, Генин, Гужаловский, Островский
МПК: A63B 69/06
Метки: движений, координации, тренировки
...по пересечению тени тренирующегося информационными элементами движущегося изображения обеспечивает полную безопасность тренировки, так как из поля зрения тренирующегося исключается узкий направленный световой луч, который может вызвать кратковременное ослепление, исключает необходимость какой-либо экипировки на теле тренирующегося, что обеспечивает полную свободу движений, а также обеспечивает простоту реализации способа, так как для получения тени тренирующегося на отражающей поверхности нет необходимости в узком высокоэнергетическом луче (известный способ). щегося светового пучка (который обеспечивает, например, обычный кинопроектор),Создание тени тренирующегося на отражающей поверхности предполагает, что тренирующегося...
Шариковая втулка петухова п. з. для вращательного и возвратно-поступательного движений

Номер патента: 1732043
Опубликовано: 07.05.1992
Автор: Петухов
МПК: F16C 33/38
Метки: возвратно-поступательного, вращательного, втулка, движений, петухова, шариковая
...вращаться. Поэтому втулка может легко перемещаться вдоль своей оси.При работе втулка вращается вокруг своейоси (или нала) и одновременно легко перемещается по оси или валу при соприкосновении с деталями, насаженными напоследний, Радиально-осевая шариковаявтулка не создает значительных сил тренияпри осевом перемещении опоры мостовогоили козлоного крана но время перекоса моста(забегание с од гой стороны моста относительно другой) и те .1 проня гсгнуст образовани. больши г 1 ерекось.: х нагрузок во времязаклинивания ходовых колес крана,На фиг, 1 изображена втулка, вид спереди; на фиг. 2 - вид А на фиг. 1; на фиг. 3 -сечения Б-Б и В-В на фиг, 1; на фиг. 4 - узел1 на фиг. 1; на фиг, 5 - сечение В - В на фиг. 2.Втулка выполнена из...
Трехкомпонентный стенд угловых движений

Номер патента: 1753426
Опубликовано: 07.08.1992
Авторы: Кутепов, Наумкин, Полосатов
МПК: G01P 21/00
Метки: движений, стенд, трехкомпонентный, угловых
...При вк 51 ОчеОм привод 8люлька согОрвсОт наклоны Относительно полуосей люльки, а наклоны относительно горизонтальных полуосей отсутству от, При Двух Вкл;оченных приводах люгЬка совершает наклонь Относительно двух осей, причем оба эти движвни 51 не сказываот ВлияИя друг на Друга, 1 ил,сферлческого четырехзвенника, Вкл 10 чаовОго закрепленнуо на выходном валу 10 редукгора 9 криволинейную направляощуо 11 с фиксатором 12, входя ший в нее дуговой кривошип 13 с регулируемым углом раствора д, поводок 14, шарнирно связанный с дуговым к 7 ивошпом 13 и заканчивающийся вилкой 15, шарнирно соедиеной с вь 1- ходным Валом 16.ЛОлька 3 и рама 2 связаны механизмом кинемагичаской связи, вклОчаощим зубчатое колесо 17., паразитное колесо 18,...
Устройство для коррекции движений

Номер патента: 1757638
Опубликовано: 30.08.1992
Авторы: Бутуханов, Шкарпетова
Метки: движений, коррекции
...тренировокпациент приступает к адаптивному биоуправлению электрической активностью мышц спины, которое заключается в следующем. Пациенту обьясняют, что необходимо произвольно напрячь мышцы спины. При этом миосигналы усиливаются усилителями (1, 2), после чего они поступают на интеграторы (3, 4), где ичтегрируются с постоянной времени 0,1 с, Затем проинтегрированные миосигналы поступают на формирователь функции модуля разности (7), где определяется разница проинтегрированных миоеигналов мышц справа и слева, Если имеется разница в уровнях том ставится задача в 1 режиме тренировки - в течение 5 секунд тонического напряжения мышц минимизировать этот сигнал, а затем выполнить активное расслабление мышц в течение 10 секунд; при втором режиме -...
Устройство для восстановления движений в коленном суставе

Номер патента: 1762904
Опубликовано: 23.09.1992
Авторы: Аскаров, Ахмалетдинов, Коновалов
МПК: A61B 17/56
Метки: восстановления, движений, коленном, суставе
...голень, которые затягивают в скобах и скобы устанавливают в рабочем положении. При помощи ортопедического угломера на полозьях 13 устанавливаются ограничители 22, определяющие углы сгибания и разгибания. Проводят под колено ременную петлю 21 и, регулируя длину тросика 20, устанавливают необходимое натя 5 10 15 20 25 30 35 40 45 50 55 жение ременной петли 21 и пружины 19, Ассистент возвратно-поступательным движением ручки 18 смещает раму 11 вверхвниз, что приводит к сгибанию - разгибанию ноги в коленном суставе. При разгибании ноги движение рамы 11 вверх) происходит натяжение тросика 17, которое передается через пружину 19 на ременную петлю 21, которая тянет вверх голень относительно бедра, при этом, как и при нормальном разгибании...
Аппарат для восстановления движений в коленном суставе

Номер патента: 1768148
Опубликовано: 15.10.1992
Авторы: Бурлаков, Илизаров, Немков
МПК: A61B 17/60
Метки: аппарат, восстановления, движений, коленном, суставе
...бедра. Затем накладывают аппарат на конечность. Перемещая вилку 23 с бедренной штангой 7 поворотного механизма 6 в двух взаимно перпендикулярных направлениях в сагиттальной плоскости, добиваются проекционного совмещения отверстия 36 с соответствующей ему точкой-ориентиром на мягких тканях,С помощью зажимного блока 13 фиксируют бедренную штангу 7 в данном положении на кронштейне 14, Затем, поворачивая вилку 23, проекционно совмещают отверстие 37 с соответствующей ему точкой-ориентиром и затяжкой болта 25 и гайки 26 с помощью прижимной планки 24 фиксируют вилку 23 на бедренной штанге 7. После чего штангу голени 9 с помощью кронштейнов 16, 17 с резьбовыми хвостовиками 20 соединяют с дистальной опорой 2, Другой поворотный механизм 5...
Устройство для регистрации движений надплечий

Номер патента: 1777825
Опубликовано: 30.11.1992
Авторы: Кейер, Хотякова, Челнаков
МПК: A61B 5/11
Метки: движений, надплечий, регистрации
...5 на.осях 6 потенциометрических датчиков 2, Оси 7 потенциометрических датчиков 4 с помощью шарнира 8 соединены с рычагами 9 изогнутых по анатомической форме ключиц. К последним прикреплены надплечники 10, выполненные из термопластического материала (например, поливик). Пластину 1 фиксируют над грудино-ключичными сочленениями, а жесткие рычаги - 9 - над акромиально-ключичными сочленениями с помощью ремней 11, 12 крепления, выполненных, например, из тесьмы с лентой "вилькро".Устройство используют следующим образом.Пластину 1 фиксируют над грудиноключичными сочленениями, а жесткие рычаги 9- с надплечниками 10 над акромиально-ключичными сочленениями при помощи ремней 11, 12 крепления. Шарниром 8 регулируют плотность прилегания пластины 1...
Устройство для регистрации движений позвоночника

Номер патента: 1777874
Опубликовано: 30.11.1992
Авторы: Трофимова, Хотякова, Челнаков
МПК: A61B 5/11
Метки: движений, позвоночника, регистрации
...его оси, жестко укреплен посредством Г-образного рычага 3 потенциометрический датчик 4, ось которого соединена со стойкой 5,Устройство используют следующим образом,При помощи элементов крепления (например, тесьмы) пластину 1 фиксируют в . области крестца, а гибкую стойку 5 фиксируют по оси позвоночника, В соответствии с программой исследования испытуемоМу предлагают выполнить соответствующее движение и при этом регистрируют блоком регистрации пространственное перемещение позвоночника в вертикальной и сагиттальной плоскостях. Движение туловища вправо-влево в вертикальной плоскости фиксируют потенциометрическим датчиком 2. При повороте туловища вокруг оси симметрии в сагиттальной плоскости изменение положения фиксируют...
Устройство для преобразования движений

Номер патента: 1784474
Опубликовано: 30.12.1992
Автор: Яшин
МПК: B23Q 5/22, B30B 1/26, B43L 13/10 ...
Метки: движений, преобразования
...каждому поло жению ведущего звена 22 наплоскости соответствует определенная совокупность углов аз, а поворота втулок 3 и 5 отно сительно центров О и О подобия соответст-.венно или наклона звеньев 7 и 15 относительно отрезка АВ. Таким образом,положение ведущего звена 22 и, следовательно, ведомого среднего звейа 25 на плоскости может быть задано совокупностью значений углов а 1 или аз поворота од-. 20ной из втулок 2 илив одной пантографе иуглов а 2 .или.а поворота одной из втулок 4 или 5 вдругом пантографе или сово-купностЬю величйн разности междузначениями углов а 1, аз поворота втулок2, 3 изначейиями углов а 2, а 4 поворота втулок 4, 5, При использовании в качестве ведущих звеньев втулок 2 и 4 устройство работает следующимобразом:...
Способ определения амплитуды вертикальных тектонических движений локальных структур

Номер патента: 1785574
Опубликовано: 30.12.1992
МПК: G01V 1/00
Метки: амплитуды, вертикальных, движений, локальных, структур, тектонических
...по геапогцчесг Ог у разрезу обуспонпена глав" ныг образог необратиггьп.1 и преабразованичг 1 т, проигодчщцг 7 г в породе в теченгге длительного геологического врегени, прц погру т енг 7, Эта зависимость аппракс 1 г 1 т 1- рретсл пинсйнОй с угпэзыг 1 козфф 14 т 1 ентам й Прчаднчтцц породы в результате текгонцчес ц днц+енцй с ней не процсьодТни ани дапьнейшц; преобразований, и позгог 1 у значение сгорости рзспрастраненцч н ней упругик волн осгаетсч практичесг ц неизменным Пусть в момент маг сгп 7 дчьнага пдпеопогру+ентч спач аггплцгуда структуры быпзНз а н ддпьнейшег 7 при обще 1 поднчтиц агпптТуда ст(зуТуры стала Л Н В силу сгаздннага выше, соотнетстнующце цзмененип значений сгоростц распрастрдненич упруги волн н слое, Отвечающие изг 7...
Устройство для разработки движений руки, а именно предплечья и кисти

Номер патента: 1788904
Опубликовано: 15.01.1993
Авторы: Аблакулов, Асамов, Баратов, Кадыров, Ким, Холмурадов
МПК: A61H 1/02, A63B 23/00, A63B 23/12 ...
Метки: движений, кисти, предплечья, разработки, руки
...по величине нагрузки, выполненное в виде пружины 23, и средство дополнительного колебательного движения ротатометра 9, включающее рычаг 24 с педалью 25, один концевой участок пружины 23 соединен с поворотной осью 26 педального рычага 24, а второй с возможностью перестановки закреплен посредством элементов 27 крепления на опоре 2. Шкивы 12, 22 соединены между собой гибкой тягой 28, а шкив 19 со шкивом 22 гибкой тягой,На фиг.3 изображен угол а поворота 29 педали 25 рычага 24.Угола может иметь максимальное значение равное 90 (от нуля по обе стороны), а максимальное значение механического момента на шкале равняется 8 - 20 н,м,На фиг, 5 позицией 31 обозначено направление супинации для правой руки, поз, 30 то же для пронации правой...
Способ формирования пространственных траекторий движений звеньев тела спортсмена

Номер патента: 1795895
Опубликовано: 15.02.1993
Авторы: Бойко, Бондаренко, Коряжкин, Крючков, Ратов, Самотесов
МПК: A63B 21/00
Метки: движений, звеньев, пространственных, спортсмена, тела, траекторий, формирования
...ввода сигналов с датчиков 3, 4 и для вывода сигналов управления на устройство 6 использовались стандартные для вычислительных машин типа"Электроника 60", ДВК, ДВКмодули И 2параллельного обмена.В качестве нагружающего устройства 1с тормозным механизмом 2 использовался ми вала, С одной стороны на конце вала устанавливается барабан с намотанным на нем вытяжнымтросом 7. С другой стороны вала на нем закреплен плоский диск с калиброванными отверстиями, расположен" ными вдоль наружного края. При вращении диск перекрывает световой поток фотодиода, оптронной пары; Диск. совместно с оптопарой образует датчик 3. Подсчет количества импульсов, число которых пропорци онально длине вытянутого с барабана троса7, производится микроЭВМ,Принципиальная...
Устройство для пассивных движений нижних конечностей

Номер патента: 1801442
Опубликовано: 15.03.1993
Авторы: Абеуова, Герасименко, Тлеулин, Тулеубаева
МПК: A61H 1/00
Метки: движений, конечностей, нижних, пассивных
...серединой прикреплен поперек скользящей муфты 3, а обе скобы 4, 8соединены между собой и установлены снизу свободного торца рычага 5, при этом рычаг 5 выполнен двухколенным.Пользуются устройством следующим 25образом.Пациент ложится на кушетку и располагает голеностопы в скобах 4, 8, после чегонадавливанием на рукоятку б от себя онраспрямляет нижние конечности, затем тянет рукоятку к себе и сгибает ноги в коленных и тазобедренных суставах и т,д.,совершая ритмичные движения, при этомпосле надавливания нэ рукоятку б расположенное возле нее колено рычага 5 окэзывается параллельным телу пациента,благодаря чему обеспечивается доступность хвата за рукоятку и смещение перекладины без больших усилий,Возмокность ротации перекладины 2 на валах 7...
Устройство для разработки движений в суставах

Номер патента: 1806712
Опубликовано: 07.04.1993
Авторы: Леонтьев, Хамраев, Шайхов
МПК: A61H 1/02
Метки: движений, разработки, суставах
...5 для голени, которая установленас возможностью возвратно-поступательного перемещения по корпусу 7. Шина 3 для 20туловища соединена с приводом 1 посредством жесткой тяги 8, Все шины выполненыв виде регулируемых по длине площадок исоединены между собой шарнирно,Шина 3 для туловища шарнирно соединена с жесткой тягой 8 и маховиком 9, имеющим отверстия 10 для изменения радиусавращения маховика 9, который через регулируемую цепную передачу 11 соединен сприводом 1, управляемым реле 12 времени. 30Устройство используют следующим образом,больного укладывают на функциональные шины 2, 3, 4, 5 пристегивают его к шинам 3 и 4, Ступни закрепляют на 35подстопнике б, При помощи реле времени12 задают программу, на цепной передаче11 фиксируют частоту...
Устройство для моделирования движений голосовых складок на препарате гортани

Номер патента: 1820403
Опубликовано: 07.06.1993
Автор: Кейко
МПК: G09B 23/28
Метки: голосовых, гортани, движений, моделирования, препарате, складок
...одностороннего паралича или пареза гортани одна из направляющих выполнена параллельной к оси держателя. 1 з,п, ф-лы, 3 ил. 5 О. Длина направляющих не меньше высоы голосовых и вестибулярных складок.Устройство работает следующим образом,. Жесткие направляющие 2 заостряют, устройство вводят через преддверие гортани, При этом, направляющие подводят под голосовые складки 3 и прокалывают их снизу рядом с голосовыми отростками черпало- видных хрящей на 2/3 толщины складок, чтобы подхватить голосовую мышцу. Модель приводят в движение следующим образом: при поднятии вверх проволочного держателя происходит сближение краев складок (фиг. 1), при опускании его - расхождение складок (фиг. 2). Моделирование одностороннего паралича или пареза...
Механизм б. б. лопатика для взаимного преобразования возвратно-поступательного и вращательного движений

Номер патента: 2001335
Опубликовано: 15.10.1993
МПК: F16H 29/04
Метки: взаимного, возвратно-поступательного, вращательного, движений, лопатика, механизм, преобразования
...2 и 3, а это возможно только при условии одновременного изменения взаимного углового положения звеньев 2, 3 и осевого расстояния между ними. Поэтому при вращении звена 2 звено 3 совершает возвратно-поступательное движение с величиной хода в одном направлении, равной удвоенной высоте волны, и частотой.2 и= Гц,где тг - частота колебаний звена 3,г - число волн на круговой волнообразной поверхности,и - число оборотов в минуту вращающегося звена 2.При работе механизма на тела 4 качения кроме сил, обусловленных полезной работой, совершаемой механизмом, и направленных по нормали к профилю волнообразной поверхности, действуют силы инерции, гравитации и другие, которые обуславливают наличие касательных (тангенциальных) напряжений и упругих...
Механизм б. б. лопатика для взаимного преобразования возвратно-поступательного и вращательного движений

Номер патента: 2005231
Опубликовано: 30.12.1993
МПК: F16H 25/08
Метки: взаимного, возвратно-поступательного, вращательного, движений, лопатика, механизм, преобразования
...по периферии боковой поверхности звена. Для герметизации камеры 4 45имеются уплотнения 12 и 13,Формула изобретения1, Механизм для взаимного преобразования возвратно-поступательного и вращательного движений, содержащий корпус, соосно установленные в нем два звена, одно из ь торых установлено с возможностью вращения, а другое - с возможностью возвратно-поступательного перемещения, тела качения, размещенные между торцами звеньев. выполненных в виде круговой волнообразной поверхности с профилем, у которого максимальная кривизна впадин больше максимальной кривизны выпуклоМеханизм для взаимного преооразования возвратно-поступательного и вращательного движений работает следующим образом,При вращении звена 2 тела 8 качения под действием...